第二章 机构的结构分析
- 格式:ppt
- 大小:3.11 MB
- 文档页数:96
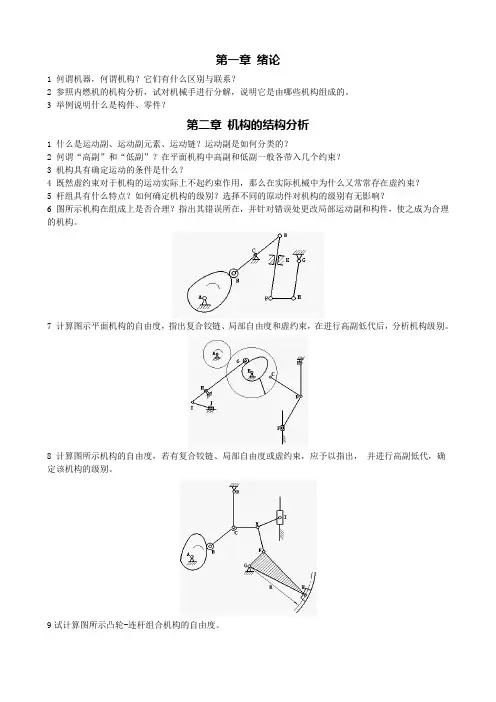
第一章绪论1 何谓机器,何谓机构?它们有什么区别与联系?2 参照内燃机的机构分析,试对机械手进行分解,说明它是由哪些机构组成的。
3 举例说明什么是构件、零件?第二章机构的结构分析1 什么是运动副、运动副元素、运动链?运动副是如何分类的?2 何谓“高副”和“低副”?在平面机构中高副和低副一般各带入几个约束?3 机构具有确定运动的条件是什么?4 既然虚约束对于机构的运动实际上不起约束作用,那么在实际机械中为什么又常常存在虚约束?5 杆组具有什么特点?如何确定机构的级别?选择不同的原动件对机构的级别有无影响?6 图所示机构在组成上是否合理?指出其错误所在,并针对错误处更改局部运动副和构件,使之成为合理的机构。
7 计算图示平面机构的自由度,指出复合铰链、局部自由度和虚约束,在进行高副低代后,分析机构级别。
8 计算图所示机构的自由度,若有复合铰链、局部自由度或虚约束,应予以指出,并进行高副低代,确定该机构的级别。
9试计算图所示凸轮-连杆组合机构的自由度。
10 在图所示机构中,AB EF CD,试计算其自由度。
11试计算图所示齿轮-连杆组合机构的自由度。
12试计算图所示齿轮-连杆组合机构的自由度。
13 试确定图所示机构的自由度;并将其中的高副换成低副,确定机构所含的杆组合机构的级别(当取凸轮为原动件时)。
14计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别15计算图示机构的自由度,并在高副低代后,分析组成这次机构的基本杆组及杆组的级别16根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。
设标有箭头者为原动件,试判断该机构的运动是否确定,为什么?17计算图示机构的自由度。
如有复合铰链、局部自由度、虚约束,请指明所在之处。
ADECHGF IBK12345678918计算图示各机构的自由度。
19计算图示各机构的自由度。
20 计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及机构的级别。
第二章机构的结构分析§2-1 机构结构分析的内容及目的1、研究机构的组成及其具有确定运动的条件目的是弄清机构包含哪几个部分,各部分如何相联,以及怎样的结构才能保证机构中各构件具有确定的相对运动。
2、按结构特点对机构进行分类不同的机构有各自的特点,把各种机构按结构加以分类,其目的是按其分类建立运动分析和动力分析的一般方法。
3、绘制机构运动简图研究机构特性的工具。
4.研究机构的组成原理研究按何种规律组成的机构能满足运动确定性的要求。
§2-2 机构的组成一、构件与运动副1、构件(Link) -独立的运动单元。
零件(part)-独立的制造单元,如齿轮。
如图2—1,连杆是由多个零件组成,即一个构件可是一个零件,也可是由多个构件组成的。
2、运动副运动副-两个构件直接接触组成的能产生某些相对运动的联接。
三个条件,缺一不可,如图2—2所示。
a)两个构件、b) 直接接触、c) 有相对运动运动副元素—直接接触的部分(点、线、面)图2—2运动副例如:滚动轴承(图2—3)、齿轮齿廓(图2—4)、活塞与缸套(图2—5)等。
图2—3滑动轴承图2—4齿轮齿廓图2—5活塞与缸套二、运动副的分类:1.按引入的约束数分类:I级副、II级副、III级副、IV级副、V级副如图2—6所示。
图2—6按引入的约束数对运动副分类2.按相对运动范围分类:平面运动副-平面运动,空间运动副-空间运动。
例如:球铰链(图2—7)、拉杆天线、螺旋(图2—8)、动物关节。
图2—7球铰链图2—8螺旋平面机构-全部由平面运动副组成的机构,如图2—9。
空间机构-至少含有一个空间运动副的机构如图2—10。
3.按运动副元素分类:①高副—点、线接触(应力高),例如:滚动副、凸轮副、齿轮副等,如图2—11所示。
图2—11高副②低副—面接触,应力低,例如:转动副(回转副)通过柱面接触、移动副通过平面接触,如图2—12所示。
常用构件和运动副的表示符号如下:图2—12低副图2—9平面机构图2—10空间机构图2—12运动副符号图2—13构件表示方法注意:如图画构件时应撇开构件的实际外形,而只考虑运动副的性质。