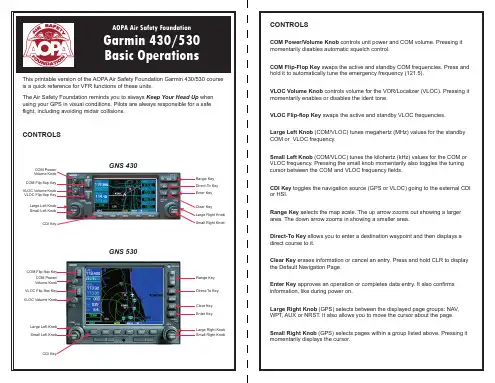
PLC远程下载说明书GRM530使用手册
- 格式:pdf
- 大小:2.75 MB
- 文档页数:28
目 录前言 (3)第一章 安全及注意事项 (5)1.1安全事项 (5)1.2注意事项 (7)第二章产品信息 (9)2.1命名规则 (9)2.2铭牌 (9)2.3CM530变频器系列 (10)2.4技术规范 (11)2.5产品外型图、安装孔位尺寸 (14)2.6选配件 (20)2.7变频器的日常保养与维护 (20)2.8变频器的保修说明 (22)2.9选型指导 (22)2.10制动组件选型指南 (23)第三章 机械和电气安装 (26)3.1机械安装 (26)3.2电气安装 (30)第四章 操作与显示 (43)4.1操作与显示界面介绍 (43)4.2功能码查看、修改方法说明 (45)4.3监控参数的查看方法 (46)4.4密码设置 (46)4.5电机参数自动调谐步骤 (48)第五章 参数说明 (49)5.1F0组基本功能组 (49)5.2F1组启停控制 (55)5.3F2组V/F控制参数 (58)5.4F3组矢量控制参数 (61)5.5F4组电机参数 (64)5.6F5组输入端子 (65)5.7F6组输出端子 (71)5.8F7组辅助功能及人机界面功能 (74)5.9F8组通信功能 (82)5.10F9组故障与保护 (83)5.11FA组过程控制PID功能 (85)5.13FC组多段速功能及简易PLC功能 (89)5.14FD组(保留) (94)5.15FE组增强组 (94)5.15FF组厂家参数组 (94)第六章EMC(电磁兼容性) (95)6.1定义 (95)6.2EMC标准介绍 (95)6.3EMC指导 (95)第七章 故障诊断及对策 (98)7.1故障报警及对策 (98)7.2常见故障及其处理方法 (110)第八章CM530系列变频器串行通讯协议 (111)8.1协议内容 (111)8.2应用方式 (111)8.3总线结构 (111)8.4协议说明 (112)8.5通讯帧结构 (112)8.6校验方式(CRC校验方式) (115)8.7命令及状态 (116)附件:功能参数表 (118)前言首先感谢您购买我司完全自主开发的CM系列磁通矢量控制变频器。
一种基于手机APP的PLC远程控制系统实现一、手机APP远程监控PLC的意义:随着网络技术和智能手机快速发展,远程通过手机APP对设备系统的控制单元PLC的运行进行远程预警监控的技术已经非常成熟。
基于手机APP的PLC远程监控控制系统能给设备的制造方和使用方都带来极高的经济利益。
设备使用方能随时观察设备的运行状态,及时进行预警,提高了设备运行的可靠性,避免设备故障带来不必要的损失。
生产方能也能通过远程实时查看设备的运行状态,来及时排除故障,提高售后维修的时效性,提高客户对产品的满意程度,提升产品的品牌。
基于手机APP的PLC远程监控系统的优势和特点:1. 远程监控系统可以使异地的智力之源得到充分利用。
可以使位于异地的专家通过网络获得远程监控数据,进行分析处理,实现远程监控。
2. 远程监控系统可以使异地的物质资源得到充分利用。
通过该技术的使用,可以使异地物资资源的共享和远程实验得以实现。
3.管理人员使用远程监控系统,可以不必亲临恶劣的现场环境就可以对现场的工作情况进行监视,完成对参数的设置与调整,修复故障等。
4. 远程监控系统的应用,可以实现现场运行数据的快速集中和实时采集,获得现场的监控数据,提供了远程故障诊断技术物质基础。
二、手机APP远程监控PLC系统的原理手机APP远程监控PLC系统是网络通信技术和控制技术的结合的一门先进技术。
信息技术发展使得远程监控技术得以快速发展。
远程监控技术是远程监测和远程控制的结合,远程监测是指远程获得被监控资源对象的数据信息,远程控制是指远程发送命令控制现场资源对象的运行状态。
一个远程监控系统通常由远程监控端系统、远距离数据传输、现场监控端系统构成,基本结构模型如图1所示。
三个子系统分工合作,共同实现对远程资源的监控。
图1:手机APP远程监控PLC系统的原理框图三、手机APP远程监控PLC系统的硬件组成PLC作为一种高性能的控制装置,具有稳定可靠、功能齐全、应用灵活方便、操作维护方便的优点,在工业控制系统中广泛运用。
RAPID-530用户操作手册苏州优纳科技有限公司RAPID-530用户操作手册Rev 2.1.3Copyright 2010-2011 UNIC Technologies, Inc.All Rights ReservedThis information and/or drawings set forth in this document and all rights in and to inventions disclosed herein and patents which may be granted thereon disclosing or employing the materials, methods, techniques, or apparatus described herein are the exclusive property of SUNIC.目录1.简介 (5)2.版权声明 (5)3.RAPID-530的工作原理 (6)4.软件的相关介绍 (7)5.RAPID具体程式介绍 (7)5.1 软件登录 (9)5.2 新建程式说明 (11)5.3 RAPID软体的介面说明 (14)5.4导入数据 (16)5.5 零件的制作方法 (17)5.5.1 一般CHIP的制作方法 (17)5.5.2 IC零件的编辑 (21)5.5.3 排阻的制作方法..................................................................................... . (31)5.5.4 基板MARK的制作 (34)5.5.5 多连板的制作方法 (37)5.6 RAPID零件资料库说明 (41)5.7.RAPID自动检测 (45)6.RAPID REPAIR (49)6.1 Repair软件启动畫面介紹 (49)6.2Repair主要功能介绍 (51)7.RAPID SETUP动作手册 (53)7.1 CALIBRATION动作界面了解 (53)7.2校正及设定 (54)7.3光校正 (56)7.4位置校正 (56)7.5速度 (57)7.6端口状态 (58)8.RAPID SPC (58)8.1基板检测统计报表 (59)8. 2单块基板检测报表 (63)8.3元器件检测统计报表 (64)8.4 AOI检修报表 (65)9.算法指引 (66)9.1 RP系列的成像系统和检测目的 (66)9.2颜色的描述和颜色空间 (67)9.3 RP系列算法的组成(元件对准、不良检测) (68)9.4 FOV的路径优化 (71)9.5 FAQ (72)10.保养 (73)10.1目的 (73)10.2准备工具 (74)10.3步骤 (74)11.附表-快捷键一览表 (79)RAPID-530用户操作手册苏州优纳科技有限公司1.简介AOI(Automatic Optic Inspection)的全称是自动光学检测,是基于光学原理来对焊接生产中遇到的常见缺陷进行检测的设备。
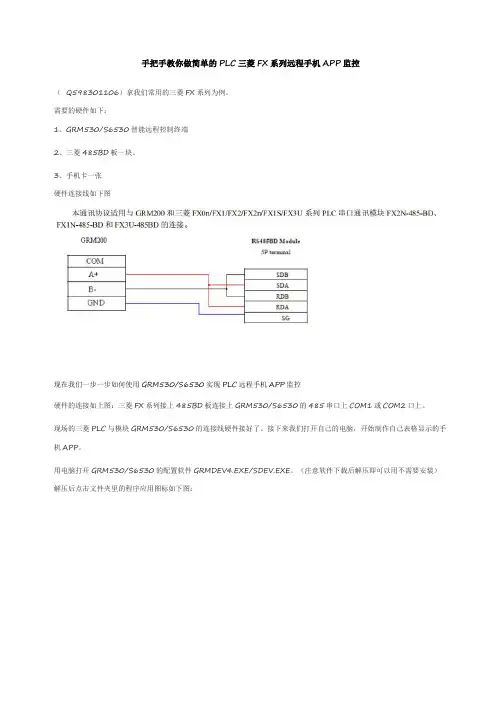
八.电脑组态软件远程监控本章节所描述的功能仅对具有3G上网功能的GRM400G系列有效。
网络结构:1.GRM400和PLC通过485连接,GRM400通过插入的手机卡3G上网。
2.远程电脑只需能上网,即可,不需要固定IP,不需另外的服务器3.远程电脑上需安装OPCSERVER,然后登陆对应模块的序号和密码。
4.组态软件是通过OPC接口从OPCSERVER访问远程的PLC数据。
完成远程监控的需要的硬件:1.GRM400G一台(插入开通3G的SIM卡)2.GRM400G下载线及24V电源3.可以上网的电脑一台完成远程监控需要的软件:1.GRM400工程配置软件GRM Dev32.巨控GrmOpcServer软件包,请从巨控公司网站上下载。
3.巨控组态软件GiantView V3.5 GRM专用版,请从巨控公司网站上下载。
也可使用组态王等任意组态软件。
完成远控的方法:1.使用GRM400工程配置软件GRMDev3完成GRM400G的工程开发和下载,如配置需要远程监控的变量,及对应的PLC寄存器地址。
2.GRM400G开发下载完毕后,插入SIM卡,使之登陆到云监控服务器。
等待数码管显示”一”3.使用巨控GrmOpcServer软件包中的GRM OPC管理器(GrmOpcMgr.exe),“添加GRM设备”后,并点击“刷新全部GRM设备”。
4.使用组态软件开发工程,将组态软件的变量关联到对应的OPC寄存器。
5.运行组态软件,即完成开发。
6.若任何时候GRM400G的变量有修改,增加,需重复1-5的步骤。
注意:使用前请开通插入短信模块的SIM卡的3G包月服务,详情请咨询SIM卡运营商(中国移动拨打10086,中国联通拨打10010)。
配置GRM网络选项在GRM 的开发工具GRMDeveloper中打开工程选项,看到如下所示网络选项对话框。
服务器地址:云监控服务器地址,除非自己搭建服务器,一般情况请勾选使用默认服务器。
目录第一章简介 (1)1.1 PMC-530前后面板示意图 (1)1.2 功能介绍 (1)1.2.1 高性能的电力测控智能装置 (1)1.2.2 输入和输出 (2)1.2.3 三相电力监视功能 (2)1.2.4 独特友好的用户界面 (2)1.2.5 报警、定值越限系统 (3)1.2.6 远程通信和联网功能 (3)1.3 系统应用 (3)第二章安装 (4)2.1 安装 (4)2.1.1 环境 (4)2.1.2 安装位置 (4)2.1.3 带显示面板的P M C-530的外观尺寸及安装开孔尺寸 (4)2.1.4 不带显示面板的P M C-530-T R A N的外观尺寸及安装开孔尺寸 (5)2.2 端子接线 (5)2.3 工作电源 (5)2.4 接地线的连接 (5)2.5 电压电流输入接线 (6)2.5.1 三相电压输入(V A、V B、V C、V N) (6)2.5.2 三相电流输入(I A、I B、I C) (6)2.5.3 P T和C T的接线 (7)2.5.4 电压参考点的连接 (7)2.5.5 三相星形系统的接线 (7)2.5.6 三相三角形系统的接线 (11)2.6 通信接线 (12)2.7 继电器的应用 (12)2.8 开关量输入的应用 (12)第三章基本操作 (03)3.1 简介 (13)3.2 开机 (13)3.3 显示模式 (13)3.3.1 面板显示 (13)3.3.2 面板按键 (13)3.3.3 参数说明 (19)3.4 工作方式设置 (20)3.4.1 简介 (20)3.4.2 进入/退出整定模式 (20)3.4.3 整定模式下各键的功能 (20)3.4.4 改变口令 (20)3.4.5 参数设置 (21)3.5 基本系统参数设置 (22)3.6 继电器输出(OUT1~OUT2) (23)3.7 开关量输入IN1~IN4 (23)第四章PMC-530技术指标 (04)4.1 精度指标 (24)4.2 三相交流电压输入(VA、VB、VC、VN) (24)4.3 三相交流电流输入(IA、IB、IC) (25)4.4 光电隔离开关量输入(IN1~IN4、COM) (26)4.5 继电器输出(OUT1、OUT2、OUT3、OUT4) (26)4.6 隔离通信接口 (27)4.7 工作电源(POWER) (27)4.8 工作环境 (27)第五章PMC-530配置说明 (27)5.1 基本配置 (27)5.2 可选配置 (27)5.3 标准配置 (27)5.4 配置举例 (28)5.5 通信参数 (28)第一章简介1.1 PMC-530前后面板示意图图1.1.1 带显示的PMC-530电力测控智能仪表前面板图图1.1.2 PMC-530电力测控智能仪表后面板图1.2 功能介绍1.2.1 高性能的电力测控智能装置PMC-530是一种数字式三相电力测控智能装置,直接针对一回线路设计,能够完成一回线路的监控功能,广泛用于工业、商业、民用电力系统和变电站中。
PM-530 数字信号接口卡技术说明书1.概述:PM-530 数字信号接口卡适用于PC104总线的嵌入式微机。
CPU从目前广泛使用的64位处理器直到早期的16位处理器均可适用,操作系统可选用经典的MS-DOS,目前流行的Windows系列等多种操作系统。
本接口卡为用户提供了48个TTL标准的输入/输出数字信号通道。
同时还提供3个16位字长的定时/计数器通道。
为方便用户使用,本接口卡还提供了一个1MHz的基本时钟,以及一组+5V电源。
2. 主要技术参数:2.1 数字信号输入/输出部分:2.1.1 接口芯片:8255×2片2.1.2 通道数:6路,每路8位,共48个通道2.1.3 输入/输出信号电平:TTL标准电平2.1.4 输入/输出控制选择:程序设置选择2.2 定时/计数器通道部分:2.2.1 接口芯片:8253×1片2.2.2 通道数:3路2.2.3 计数字长:16位2.2.4 最高计数频率:2MHz2.2.5 输入/输出/控制信号电平:TTL标准电平2.2.6 基本时钟:1MHz2.3 电源功耗:+5V(±10%)≤400mA(空载无负荷时)2.4 使用环境要求:工作温度: 0℃~40℃;相对湿度: 40%~80%;存贮温度:-55℃~+85℃2.5 外型尺寸:90mm×96mm- 1 - 3. 工作原理:PM-530 数字信号接口卡主要由数字I/O电路、定时/计数器电路、内部时钟电路及接口控制逻辑电路组成。
3.1 数字信号输入/输出电路:数字信号输入/输出电路部分由两片8255可编程并行接口芯片组成。
每片8255可编程并行接口芯片的PA、PB、和PC三组输入/输出信号线在经过33Ω电阻限流处理后通过26线扁平带缆接头J2、J3与外设相连,其输入/输出状态由用户根据需要通过程序进行设置。
3.2 定时/计数器电路:定时/计数器电路由一片8253可编程定时/计数器接口芯片及跨接选择器J5、J6等组成,可为用户提供3个16位字长的定时/计数通道。

一.通过网口远程下载调试PLC梯形图先利用模块内置的网页配置好GRM设备的IP,然后在远程任何电脑上安装好巨控GVCOM3远程下载软件,即可对远程的PLC进行下载梯形图,和监控梯形图的操作。
技术支持:QQ:598301106配置GRM设备1.给GRM530接上DC12~24V电源。
2.电脑通过网线(出厂标配)直接和GRM530的LAN网口连接,或者电脑和GRM530的WAN口插入同一交换机(路由器)。
用电脑通过GRMDEV配置GRM530模块,需要保证电脑的IP和GRM530的IP在同一个网段内。
如果不在一个网段内,请将电脑的IP设置成和GRM530一个网段。
出厂时,GRM530的LAN1或者LAN2口的IP为192.168.1.240,WAN口的IP为动态分配。
GRM530LAN网口和WAN网口都可以用来本地局域网内下载模块的配置。
比如电脑和模块LAN口连接,可以将电脑IP可以设置为192.168.1.211,子网掩码255.255.255.0。
我们可以通过IPCONFIG命令来查看自己电脑上全部网络连接的IP。
一台电脑上可能有多个网络连接,比如无线网卡,有线网卡,这样你用IPCONFIG可以看到多个IP,所以要区分清楚是哪个网络连接对应哪个IP。
如果忘记了模块网口IP地址,可以给GRM530断电后,按住模块上的复位按钮,再重新启动。
启动后,数码管会显示“三三”,松开按钮,然后再按住按钮5秒,等数码管闪烁显示“三三”时松开按钮即可复位模块为出厂的IP。
电脑IP设置好以后,通过网线和模块LAN口连接,在电脑的浏览器输入模块的当前IP地址(默认192.168.1.240),即可进入模块网络设置界面。
如下图,点击“提交修改”,“重启模块”即可修改模块2个网口的IP地址为新的地址。
LAN网口用于连接PLC和触摸屏,设置该网口IP和PLC,触屏IP在同一个网段即可。
WAN口用来接入外网连接云服务器,根据网口接路由器的情况设置IP,请参考下一章节的内容。
PMC-530系列三相数字式多功能测控电表用户手册(V4.0)PMC-530系列使用说明书版本V4.0危险和警告本设备只能由专业人士进行安装,对于因不遵守本手册的说明所引起的故障,厂家将不承担任何责任。
触电、燃烧或爆炸的危险设备只能由取得资格的工作人员才能进行安装和维护。
对设备进行任何操作前,应隔离电压输入和电源供应,并且短路所有电流互感器的二次绕组。
要用一个合适的电压检测设备来确认电压已切断。
在将设备通电前,应将所有的机械部件,门和盖子恢复原位。
设备在使用中应提供正确的额定电压。
不注意这些预防措施可能会引起严重伤害。
本说明书版权属深圳市中电电力技术有限公司所有,未经书面许可,不得复制,传播或使用本文件及其内容,违犯者将要对损坏负责。
深圳市中电电力技术有限公司保留所有版权。
我们已经检查了本手册关于描述硬件和软件保持一致的内容。
由于不可能完全消除差错,所以我们不能保证完全的一致。
本手册中的数据将定期审核,并在下一版的文件中做必要的修改,欢迎提出修改建议。
以后版本中的变动不再另行通知。
PMC-530系列使用说明书版本V4.0目录1概述 (1)1.1功能介绍 (1)1.2系统应用 (4)2技术指标 (4)2.1环境条件 (4)2.2额定参数 (4)2.3精度 (6)2.4其他 (6)3安装与接线 (8)3.1安装 (8)3.2端子图 (8)3.3接线原理图 (8)4使用操作 (16)4.1按键说明 (16)4.2默认界面 (16)4.3液晶自检 (16)4.4显示模式 (16)4.5整定模式 (21)4.6改变口令 (26)5功能介绍 (27)5.1基本测量 (27)5.2需量 (29)5.3电能 (29)5.4继电器操作 (29)5.5定值越限 (30)5.6开关量监视 (30)5.7SOE记录 (30)5.8AO输出功能 (30)5.9AI输入功能 (31)5.10剩余电流保护功能 (31)5.11定时记录 (32)5.12分时计费 (33)5.13波形的瞬态捕捉 (33)5.14波形采样 (34)6装置故障分析 (35)7质量保证 (36)7.1新装置质量保证 (36)7.2装置质保限制 (36)8附图 (37)8.1机械尺寸图 (37)8.2典型端子图 (38)9手册变更记录 (39)1概述1.1功能介绍高性能的电力测控智能电表PMC-530系列(530A、530B、530C)三相数字式多功能测控电表,直接针对一回线路设计,能够完成一回线路的监控功能,广泛用于工业、商业、民用电力系统和变电站中。
数字调控器cp530说明书
CP530 数字调控器是一款用于电机转速控制的设备,它采用数字技术控制电机的启动、运行、停止等操作,具有防抖动、防过压、防过流、过载保护等多种安全保护功能。
以下是具体的说明书:
1. 外观:
CP530 数字调控器外观简洁,采用黄色与黑色配色,外壳采用塑料材质制造,具有较好的防护性能。
2. 性能特点:
(1)电源电压范围宽,适用于不同的应用场合;
(2)具有PWM 调速、起停平滑、过载保护等多种功能;
(3)带有数字显示屏,可直观显示电机转速、电流、电压等重要信息;
(4)运行状态可靠稳定,可适用于各种类型电机。
3. 产品参数:
(1)工作电压:AC220V ± 10%;
(2)输出功率:2.2KW;
(3)控制方式:PWM 调速;
(4)输出调节范围:0-100%;
(5)负载类型:异步电机;
(6)工作环境:温度-10℃~40℃,相对湿度≤80%。
4. 使用说明:
(1)接通电源后,数字显示屏将显示电机的转速;
(2)按下“运行/停止”按钮,电机启动运转;再按下同一个按钮,电机停止运转;
(3)调整旋钮,可实现电机的转速调节;
(4)当出现过载等异常情况时,系统将采取相应的保护措施。
以上就是CP530 数字调控器的主要说明,请按照说明书进行正确的使用。
Security Monitoring and Management System of Tower CraneIntroduction of PM530 System2.0. Equipment commissioning2.1 Introduction of display interfaceFigure 2.4 Display panel“Amplitude”: shows the current amplitude variation of tower crane and horizontal distance from the car to the tower center; “Elevation” is the upturned angle of the arm of luffing-jib tower crane.“Collision”: shows the angle after a 360-degree post-processing; if the actual rotation angle is 380 degrees, the displayed number is 20 degrees.“Limit”: shows the true value of the rot ation angle with which the pre-alarm can be intuitively noticed thus a failure display of the actual rotation angle on the interface will not be possible when a pre-alarm occurs.“Magnification”: shows the magnification being used by the wire rope of tower crane’s lifting hook;“Admin”: system login, tower crane settings, lifting area, information and other settings/check the entrance.The last line shows the current version of the screen.The one in yellow is for this tower crane, the one in blue is for associated tower crane.Green means normal yellow means warning red means alarming3.0 System debuggingFigure 2.9 Management login interfaceClick on “Admin Login”, and enter the password (8016) then you can enter into the admin page.3.0.1 Basic informationFigure 2.10 Menu interface Figure 2.25 Coordinate interface of the tower craneDebugging method: at the corresponding place shown in the figure below, fill in the basic information of your own tower crane: number, height, height of the tower cap, boom length and length of the balance arm.3.0.2 Sensor calibrationThis menu is used for “Amplitude Calibration” and “Rotation Calibration”.Figure 2.12 Sensor calibration interface Figure 2.13 Magnitude and height calibration1. The specific operational process of magnitude calibration is as follows: adjust the car to a measurable value and keep the position unchanged, fill in the current amplitude value after the first voltage stability and then click “OK”; then adjust the car to another measurable value and keep the position unchanged, fill in the amplitude value after the second voltage stability, then click “OK”. The system will automatically calculate the value of K and B and notify you that “amplitude has been calibrated successfully”.2. The absolute encoder calibration interface is shown in Figure 2.16.Security Monitoring and Management System of Tower CraneFigure 2.16 Electronic compass calibrations on rotation“Rotation Direction”: when the absolute encoder is installed, the direction of rotation of the arm is usually incon sistent with the real one. This function will help solving this problem.“Actual Angle”: when there is a large gap between the rotation angle and the actual angle, use this function to adjust.In the process of anti-collision debugging, regulate all the en coders’ “Zero Degree” within the site to the same level. Debugging methods: make all tower crane booms point to true north and enter “Zero Degree” in “Actual Angle” to make sure that the rotation benchmark is 0.3.0.3 Relay testThis feature helps the user to test whether the installed control system can restrict operations on the tower crane. Click on the corresponding relay when testing, the corresponding operation on tower crane will disconnect. Operate the tower crane handle. If there is no action from the tower crane, it means that this control wiring is running well.Figure 2.19 Relay test interface1 Output control 1:Output control 1 leads out 16 wires connecting to the corresponding control mechanism of the crane’s left operating handle. The corre spondence of wiring’s definition and color are as follows:2. Output control 2:Output control 2 lead s out 10 wires connecting to the corresponding control mechanism of the crane’s right operatinghandle. The correspondence of wiring’s definition and color are as follows:Slewing tower crane adopts fluid coupling control. Though this system will give out control command and cut control loops in the dangerous direction when there is an alarm, the tower continues gliding under the role of inertia. The glide angle is significantly greater than the tower crane with a vortex. When operating such a tower crane, please reserve sufficient safety distance for operations.4.0 Anti-collision functionThis menu contains the following three parts: “Tower Crane Coordinates”, “Anti-Collision Alarm Parameters” and “Wireless Communications”.4.0.1 Related tower crane settingsMethods: click “Add”, enter the basic information of the tower crane that collides with yours. The “Numbers” of the two tower crane cannot be the same. Align the arm of your tower crane with the cap of the related tower crane. When the arm is stea dy, click “Automatically Obtain Angle” to get the angle; s trike out the option of “Automatically Obtain Angle” and enter the distance value between the standard sections of the two tower cranes in the blank for “Distance”. Click “OK” and “Settings” in succ ession. The whole setting process is finished successfully.“Automatic Acquisition”: aim the crane boom at the standard section of the relevant tower crane first, and click “Automatic Acquisition” to display the angular relationships between the two t ower cranes.※ 1. The machine number: arbitrarily fill in the number from 1 to 63, no repeated numbers is allowed in one site;2. Up to 10 tower cranes which collide with yours can be set;3. The “Comparing with the Machine”, “Angle” and “Distance” in the interface are all subject to this machine.4.0.2 Parameter settings of anti-collision alarm:Set anti-collision alarm/warning parameters in this menu, including: collision warning, alarm angle, collision warning and alarm amplitude values.Security Monitoring and Management System of Tower CraneFigure 2.26 Interface of anti-collision alarm parameter4.0.3 Settings of wireless communication parameters:Set the parameters of wireless communication module in this menu. There are two options PM530 and MT105 in the protocol version. If there is no option selecting, PM530 will be the default option.The “Channel Number” and “ID Number” must be identical. Communications can only be realized among multiple tower cranes, “Baud Rate”: default 38400bps.Figure 2.27 Interface of wireless communication5.0 Regional protection:This me nu contains three submenus which are “Regional Protection” and “Alarm Parameters”.Figure 2.28 Area and hoisting function interface5.0.1 Regional protection:This menu sets the area that one could not enter in the working hour of the tower crane. If one is about to enter the set area, the system will give warnings or alarm based on the current state and cut the circuit correspondingly. This system allows a maximum of settings for five regions. Areas can be lines or enclosed regions. The maximum lines and areas can only consist of five points which means that the fixed-point operation can only set for five points which is the maximum number. Otherwise, the system will prompt “you have reached the maximum number of points”. System prompting happens when the re are more than five regions. Once setup completed, click the “Settings” button.Figure 2.29 Area protection interface※Area settings, enclosed inner area, the tower cannot be set within the region.※Line settings, opening area, high-voltage lines in the site, rivers, roads and so on.Setting method: select the type of area to be set “Within the Region” or “Outside the Region”, and then determine the points of the area to be set, from left to right or right to left click on “Growth Points” successively. After the setup is completed, click “OK” then click “Settings”. The set area is added successfully.When setting the area, a minimum of three points and a maximum of five points can be set for each area; maximum of 5 regions can be set.5.0.2 Alarm parameters:In this menu, set the area protection in warning, alarm angle, amplitude warning and alarm parameters.Figure 2.30 Alarm parameter interface6.0 Height and rotation limitSet the height, rotation warning and limit parameters in this menu. In the case that the tower crane cable is not twisted, if the displayed rotation value exceeds 0 ~ 360°, clicking the “Calibration for Rotation Limit” button is needed to reset the rotation cycles, adjusting the rotation value to 0 ~ 360°.Security Monitoring and Management System of Tower CraneFigure 2.33 Figure of height and rotation limit interfaceWhen adopting electronic compass sensor, do not cut off the power tower of the monitoring equipment concerning the feature of the sensor, otherwise there will be error on angle rotation detection.7.0 Black box of tower craneIn this menu, insert the U disk into the main chassis and click the corresponding button to download.Figure 2.34 Interface of black box data downloadingBlack box will record the state of the installed sensor every 2 seconds. If the equipment works properly, the recorded data can be used as an auxiliary analysis of accidents. The data is automatically stored every 60 hours. Recording stops when the equipment is power-off.。
0438FE -V1.0捷麦-远程通-无线PLC1北京捷麦顺驰科技有限公司版权声明北京捷麦顺驰科技有限公司版权所有,并保留对本手册及本声明的最终解释权和修改权。
本手册的版权归北京捷麦顺驰科技有限公司所有。
未得到北京捷麦顺驰科技有限公司的书面许可,任何人不得以任何方式或形式对本手册内的任何部分进行复制、摘录、备份、修改、传播、翻译成其它语言、将其全部或部分用于商业用途。
免责声明本手册依据现有信息制作,其内容如有更改,恕不另行通知。
北京捷麦顺驰科技有限公司在编写该手册的时候已尽最大努力保证其内容准确可靠,但不对本手册中的遗漏、不准确或印刷错误导致的损失和损害承担责任。
我们会经常对手册中的数据进行检查,并在后续的版本中进行必要的更正。
欢迎您提出宝贵意见。
技术支持北京捷麦顺驰科技有限公司建立了以总部技术支持中心、区域技术支持中心和本地技术支持中心为主体的完善的服务体系,并提供电话热线服务。
您在产品使用过程中遇到问题时可随时与北京捷麦顺驰科技有限公司技术支持服务热线联系。
此外,您还可以通过北京捷麦顺驰科技有限公司网站及时了解最新产品动态,以及下载需要的技术文档。
北京捷麦顺驰科技有限公司:地址:北京市丰台区芳城园一区日月天地B座1505邮编:100017电话:************传真:************E-mail:******************网站:2目录版权声明 (2)免责声明 (2)技术支持 (2)1基本工作原理 (7)1.1 无线PLC组成 (7)1.2 工作原理 (9)1.2.1循环扫描 (9)1.2.2I/O响应时间 (10)1.3 编程语言 (10)2无线PLC的基本概念(梯形图) (12)2.1 属据的存取 (12)2.1.1数据的格式 (19)2.1.2用指针对存储区间接寻址 (20)2.2 理解保存和存储数据 (22)2.3 编程连接 (24)2.4 工程下载 (24)3指令集 (27)3.1 位逻辑指令 (27)3.1.1触点 (27)3.1.2线圈 (30)3.1.3逻辑堆栈指令 (32)3.1.4S触发器指令 (34)3.2 时钟指令 (35)3.2.1读实时时钟和写实时时钟 (35)3.2.2读网络时钟 (36)3.2.3时间校准 (36)3.2.4~扩展读实时时钟 (36)3.2.5~扩展写实时时钟 (36)3.3 比较指令 (37)3.3.1数值比较 (37)3.3.2字符串比较 (38)3.4 转换指令 (40)3.4.1标准转换指令 (40)3.4.2ASCII码转换指令 (44)3.4.3字符串转换指令 (47)3.4.4编码和解码指令 (51)3.5 计数器指令 (53)3.6 ~高速计数器指令 (55)3.6.1~定义高速计数器 (55)33.7 ~脉冲输出指令 (56)3.8 数字运算指令 (57)3.8.1加、减、乘、除指令 (57)3.8.2整数乘法产生双整数和带余数的整数除法 (59)3.8.3~数学功能指令 (60)3.8.4递增和递减指令 (61)3.9 ~比例/积分/微分(PID)回路控制指令 (62)3.10 中断指令 (63)3.11 逻辑操作指令 (69)3.11.1取反指令 (69)3.11.2与、或和异或指令 (70)3.12 传送指令 (72)3.12.1字节、字、双字或者实数传送 (72)3.12.2字节立即传送(读和写) (73)3.12.3块传送指令 (73)3.13 程序控制指令 (75)3.13.1基础控制 (75)3.13.2For--Next循环指令 (76)3.13.3跳转指令 (78)3.13.4顺控继电器(SCR)指令 (79)3.13.5~诊断LED指令 (85)3.14 移位和循环指令 (86)3.14.1移位和循环移位 (86)3.14.2移位寄存器指令 (88)3.14.3字节交换指令 (90)3.15 字符串指令 (91)3.15.1字符串长度/复制/连接 (91)3.15.2从字符串中复制子字符串 (93)3.15.3字符串搜索 (94)3.16 表指令 (96)3.16.1填表 (96)3.16.2先进先出和后进先出 (98)3.16.3内存填充 (100)3.16.4查表 (100)3.17 定时器指令 (104)3.17.1接通延时定时器 (104)3.17.2时间间隔定时器 (109)3.18 子程序指令 (111)4主串口通信 (115)4.1 参数说明及操作 (115)4.1.1硬件参数 (115)44.2 初始化 (116)4.3 接收 (116)4.3.1包结构 (116)4.3.2用户接收处理 (116)4.4 发送 (119)4.5 资源清单 (121)4.5.14G相关系统变量/寄存器 (121)4.5.2C语言系统函数清单 (121)4.5.3梯形图指令盒清单 (122)54G/GPRS通信编程 (123)5.1 捷麦云通讯概述 (123)5.1.14G/GPRS地址寻址方式 (123)5.1.2参数说明及操作 (124)5.2 自定义4G云概述 (125)5.3 信道初始化 (127)5.4 接收 (128)5.4.1包结构 (128)5.4.2用户接收处理 (128)5.5 发送 (131)5.6 辅助功能 (134)5.7 资源清单 (138)5.7.14G相关系统变量/寄存器 (138)5.7.2C语言系统函数清单 (138)5.7.3梯形图指令盒清单 (138)6短信通信编程 (141)6.1 短信通信概述 (141)6.1.1基本工作原理 (141)6.1.2参数说明 (141)6.1.3设置操作 (141)6.2 信道初始化 (141)6.3 接收 (142)6.3.1包结构 (142)6.3.2用户接收处理 (143)6.4 发送 (145)6.5 辅助功能 (152)7网口通信编程 (157)7.1 网口通信概述 (157)7.1.1参数说明 (157)7.1.2设置操作 (158)7.2 标准UDP通道编程 (159)57.2.2接收 (160)7.2.3发送 (165)7.3 网络通道1/2编程 (175)7.3.1初始化 (175)7.3.2接收 (177)7.3.3发送 (181)7.4 网口云平台编程操作 (192)1.1.1初始化 (192)1.1.2接收 (193)1.1.3发送 (196)1.1.4辅助功能 (201)7.5 相关清单及编程实例 (203)7.5.1网口信道编程实例 (203)8串口N通信 (206)8.1 初始化 (206)8.2 接收 (206)8.2.1包结构 (206)8.2.2用户接收处理 (206)8.2.3相关系统变量清单 (207)8.3 发送 (207)9辅助功能 (209)9.1 指令盒清单 (209)9.2 掉电保存功能 (209)10PLC资源汇总 (210)10.1 C语言 (210)10.1.1系统变量清单 (210)10.1.2通信相关系统函数清单 (211)10.2 梯形图 (213)10.2.1寄存器清单 (213)10.2.2通信相关指令盒清单 (215)10.3 适用系列 (217)61基本工作原理1.1 无线PLC组成传统PLC通过输入输出电路与现场设备直接连接,并在内部寄存器存储了这些状态,程序直接访问这些寄存器,从而达到利用软件程序寄存器(变量)代替现场硬件状态,再发挥其CPU的逻辑计算能力,以完成复杂的控制功能。
一.通过网口远程下载调试PLC梯形图先利用模块内置的网页配置好GRM设备的IP,然后在远程任何电脑上安装好巨控GVCOM3远程下载软件,即可对远程的PLC进行下载梯形图,和监控梯形图的操作。
技术支持:QQ:598301106配置GRM设备1.给GRM530接上DC12~24V电源。
2.电脑通过网线(出厂标配)直接和GRM530的LAN网口连接,或者电脑和GRM530的WAN口插入同一交换机(路由器)。
用电脑通过GRMDEV配置GRM530模块,需要保证电脑的IP和GRM530的IP在同一个网段内。
如果不在一个网段内,请将电脑的IP设置成和GRM530一个网段。
出厂时,GRM530的LAN1或者LAN2口的IP为192.168.1.240,WAN口的IP为动态分配。
GRM530LAN网口和WAN网口都可以用来本地局域网内下载模块的配置。
比如电脑和模块LAN口连接,可以将电脑IP可以设置为192.168.1.211,子网掩码255.255.255.0。
我们可以通过IPCONFIG命令来查看自己电脑上全部网络连接的IP。
一台电脑上可能有多个网络连接,比如无线网卡,有线网卡,这样你用IPCONFIG可以看到多个IP,所以要区分清楚是哪个网络连接对应哪个IP。
如果忘记了模块网口IP地址,可以给GRM530断电后,按住模块上的复位按钮,再重新启动。
启动后,数码管会显示“三三”,松开按钮,然后再按住按钮5秒,等数码管闪烁显示“三三”时松开按钮即可复位模块为出厂的IP。
电脑IP设置好以后,通过网线和模块LAN口连接,在电脑的浏览器输入模块的当前IP地址(默认192.168.1.240),即可进入模块网络设置界面。
如下图,点击“提交修改”,“重启模块”即可修改模块2个网口的IP地址为新的地址。
LAN网口用于连接PLC和触摸屏,设置该网口IP和PLC,触屏IP在同一个网段即可。
WAN口用来接入外网连接云服务器,根据网口接路由器的情况设置IP,请参考下一章节的内容。
GRM530WAN口连接外网配置方法1:路由器如果允许DHCP(动态主机配置协议),那么WAN口的IP选为“自动获取IP地址”即可,如上图。
比如你的电脑是通过路由器上网,而该网络连接的IP是选的自动,那么说明该路由器允许DHCP。
2:路由器如果不允许DHCP,那么该网口的IP请根据路由器的要求设置为和路由器相同网段,并且和局域网内其他主机的IP不冲突即可。
GRM530Wifi连接外网配置方法GRM530的WIFI只能用于连接云服务器(要求该WIFI能联入外网,比如手机连入该WIFI热点可以上网),实现GRM530模块不用插卡接入外网,WIFI不能做它用,(也不能在局域网电脑通过WIFI下载模块配置,如果需要配置模块,请使用远程配置或本地用网线直连电脑配置模块)。
使用方法如下:1.给GRM530接上DC12~24V电源,并插好WIFI天线。
2.电脑通过网线(出厂标配)直接和GRM530的网口连接,或者电脑和GRM530都插入同一交换机(路由器)。
3.用电脑通过网页配置GRM530模块的WFII,需要保证电脑的IP和GRM530的IP在同一个网段内。
如果不在一个网段内,请将电脑的IP设置成和GRM530一个网段。
出厂时,GRM530的2个LAN口的IP均为192.168.1.240可以将电脑IP可以设置为192.168.1.211,子网掩码255.255.255.0。
4.用电脑浏览器输入模块的IP192.168.1.240,即可打开网页配置界面,进行WIFI配置。
注意WIFI路由器名称和密码要完全正确输入,区分大小写,一个字母也不要输错。
5.WIFI连接成功后,下面会显示连接状态,信号强度,一般信号强度要求50以上。
PLC端的准备1.GRM530插上3G/4G卡,或者通过网线,WIFI,连接因特网。
2.PLC的网口和GRM530的LAN网口连接。
不同的PLC连接方式有所不同,请参考后面各种PLC的下载方法。
编程电脑端的准备1.全部按照默认选项,直接安装GVCOM3。
如果安装后出现如下图,点击下一步即可。
注意:安装过程中,务必关闭全部杀毒软件和防火墙!。
安装完毕后,在我的电脑设备管理器里面,出现如下的虚拟串口,表示驱动已经安装成功!2.安装完毕后,运行GVCOM3,点击下面的“新建模块”,输入模块11位序号和密码即可。
初始密码为111111.(必须登录网页修改密码后才可以使用)3.点击“下一步”,设置好相关参数,并确定即可。
如果你的PLC的编程口是通过GRM的网口连接,直接点下一步,多点几次,直到出现网口通道。
网口名称:选择安装好的虚拟网口TAP-WIN32Adapter V9,如果没有,点下拉框自动新建即可。
网口IP:该IP只要求和你远程PLC的IP一个网段,并且和其同网段的设备不冲突即可。
如上图,和网口连接的远程PLC地址为192.168.0.100,网口IP随便设置为该网段的一个IP,和这些PLC不冲突即可。
子网掩码:255.255.255.0。
网口连接设备的IP地址段:也就是你要远程下载PLC的IP(可以是一个IP,如果有多个PLC,也可以是一个IP段)GVCOM里面设置的网口IP其实就是电脑上虚拟网卡的IP,这个IP还有GVCOM中设置的网口连接设备的IP地址,都不能和电脑上面任何网卡的IP在一个网段。
比如你电脑IP通过路由器或者无线上外网,获得的IP段是192.168.10.X,那么你可以将GVCOM设置的客户端IP、PLC IP设置到192.168.0.X。
(最后一段地址X建议不要使用.1或者.255之类的非常规IP。
)为了防止冲突,请在设备管理器里面禁用掉电脑上不用的其他网卡(比如你电脑通过WIFI上网,可以禁用掉你电脑上的有线网口)可以使用IP CONFIG查看当前电脑上全部网卡的的IP,来确认电脑上其他网口的IP地址均和GVCOM的虚拟网卡IP不在一个网段。
点击,出现如下图所示“模块已连接”时表示可以远程下载PLC/HMI项目了。
此时您可以尝试使用ping命令直接PING PLC的IP地址,检测PLC是否在线。
只要开始PING,那么上图的虚拟网卡发送(T)的数据字节应该会增加,否则就是GVCOM虚拟网卡没有正常工作.这样,就在电脑上虚拟出了一个名为TAP-WIN32Adapter网卡并已经能成功的找到了远程的PLC,编程软件下载PLC程序时,选这个网卡即可下载。
注意:如果启用了虚拟网卡,GVCOM连接模块后,应该在操作系统控制面板的网络和共享中心里面看到虚拟网卡已经运行,并可以看到TAP-WIN32Adapter的网络连接。
如果电脑上虚拟网卡被拦截或者运行不正常,可以试着重装GVCOM软件!网络诊断在GVCOM里面点击右上角测速图标可以测试网络状况:启动测试后,可以显示测试结果:云服务器响应延迟:该延迟时间是测试电脑到巨控云的延迟时间,正常延迟时间约50MS以内,并不得有丢包情况,如果有延迟过大或丢包,表明电脑本身网络状况不佳,可能导致下载不流畅或者不成功.请自行解决电脑本地上网的问题,比如重启电脑,重启路由器,关闭迅雷下载等软件。
模块响应延迟:该延迟时间是测试电脑到巨控GRM模块的延迟时间,该时间包括了云服务器响应延迟加上模块上网的延迟时间。
如果模块使用4G上网,正常延迟时间约150MS以内,如果有延迟过大或丢包,表明4G网络不佳。
如果模块使用网线上网,正常延迟时间约80MS以内,如果有延迟过大或丢包,表明模块上网的有线网络不佳。
设备响应延迟:该延迟时间是前面2个时间加上PLC的响应延迟,测试时需要输入PLC的IP.如果无法PING到PLC,有可能是PLC IP 地址不正确,或者和模块链接的网线网口有问题。
S7-200SMART远程下载本例中S7200SMART IP地址为192.168.2.2。
在下图所示对话框中选择模块网口通道使用的网卡适配器。
找到PLC后点击“确认”即可下载PLC工程。
如果未找到PLC,编程软件报错,可以点击“添加CPU…”直接添加PLC,然后点击“确认”即可下载PLC工程。
S7-1200远程下载本例中S71200IP地址为192.168.0.1。
在下图所示对话框中选择模块网口通道使用的网卡适配器。
与远程PLC建立连接后即可下载和调试PLC程序。
如果搜索不到PLC,可以直接在上图红色部分直接输入PLC的IP来下载调试。
S7-300/400远程下载本例中S7400IP地址为192.168.2.142。
步骤1:设置PLC IP地址。
下图以CPU313C+CP343-1为例,PLC IP地址为192.168.2.142。
步骤2:设置PG/PC接口。
选择模块网口通道使用的网卡适配器,点击“确认”后即可下载PLC项目。
欧姆龙PLC远程下载本例PLC为CP1H,网口扩展模块为CP1W-CIF41。
IP地址为192.168.250.1。
注意:CP1W-CIF41拨码开关4拨到ON位置。
步骤1:网络类型选择“Ethernet(FINS/TCP)”,点击“设定”。
步骤2:输入IP,确定后即可下载。
AB PLC远程下载启动RSLinx Classic,打开Configure Drivers对话框,如下图所示,选择“Ethernet/IP Driver”,点击“Add New…”。
点击OK。
点击“Configure…”,选择模块网口通道使用的网卡适配器,点击“确定”。
在RSLinx Classic中找到PLC后即可下载项目。
三菱Q系列以太网模块远程下载(QJ71E71-100)本例中QJ71E71-100的IP地址为192.168.2.38。
步骤1:设置PLC的IP192.168.2.38步骤2:设置通讯接口(注意,计算机侧站点号必须与编程器站点号不一样)计算机侧站点号设置2编程器站点号设置1,模块类型QJ71E71,PLC的IP192.168.2.38步骤3:通信测试(测试好如下图)三菱Q系列内置网口本例中Q系列内置网口地址为192.168.2.38。
通信测试,如下图昆仑通态触摸屏网口远程下载工程1,本例中昆仑通态地址为192.168.2.38。
(打开GVCOM3,新建模块,系列和实际模块必须相符,输入模块序号和密码)2:点击下一步,知道下一步到以太网口3:选中启动通道,网口IP如192.168.2.1(与触摸屏同一网段),下面设备IP填触摸屏的IP如:192.168.2.38,点击完成后,点击启动,如下图(启动后会出现模块已连接)4:打开昆仑通态触摸屏工程(点击下载,输入触摸屏IP如,192.168.2.38,点击工程下载即可)威纶通触摸屏网口远程下载工程1,本例中威纶通触摸屏地址为192.168.2.38。