(PLC)电动机点动控制
- 格式:doc
- 大小:83.50 KB
- 文档页数:5
PLC“点动或长动控制”实验程序作者:张行松单位:鄂东职业技术学院下面以FX2N型PLC编程为例,分三步介绍PLC“点动或长动控制”实验程序。
一、“点动控制”实验程序所谓“点动”,就是用按钮对控制对象(如电动机或指示灯等)进行控制,当手按下按钮时,电动机起动运转(或灯亮),当手松开按钮时,电动机停止运转(或灯灭)。
点动控制实验程序可作为学习PLC编程的入门。
1.I/O分配输入:点动按钮--X0输出:Y0——接24V直流电动机或指示灯2.点动控制时序图3.“点动控制”实验程序注意:这个点动控制程序是用点动按钮来控制的。
如果把点动按钮换成开关,那么这个程序还可用作长动控制。
通过这个实验我们可以细心地体会一下“按钮”和“开关”在控制特性上的区别。
二、“长动控制”实验程序所谓“长动”,就是用按钮对控制对象(如电动机或指示灯等)进行控制,当手按下起动按钮时,电动机起动运转(或灯亮),当手松开按钮时,电动机仍保持运转(或灯仍保持亮)。
直到按下停止按钮时才停止。
“长动控制”除了设起动按钮,还必须增设一个停止按钮,否则,在起动了之后停不了可不行。
“长动控制电路”也叫“起保停电路”,它是PLC编程的典型环节。
1. I/O分配输入:起动按钮--X1停止按钮--X2输出:Y0——接24V直流电动机或指示灯2.长动控制时序图3. “长动控制”实验程序这是一个典型的起保停电路。
三、“点动或长动控制”实验程序1. 控制要求:(1)调整时用点动按钮,运行时用长动按钮;(2)停止按钮优先,设为总停,不单停长动,也停点动;(3)点动按钮第二,设为能随时取替长动。
2. I/O分配输入:点动按钮—X0长动起动按钮--X1总停按钮--X2输出:Y0——接24V直流电动机或指示灯3. “点动或长动控制”实验程序编写这个程序时要避免出现“双线圈输出”现象。
所谓“双线圈输出”是指在同一个程序中同一元件的线圈使用了两次或两次以上,这时前面的输出无效,只有最后一次有效。
电动机点动的控制
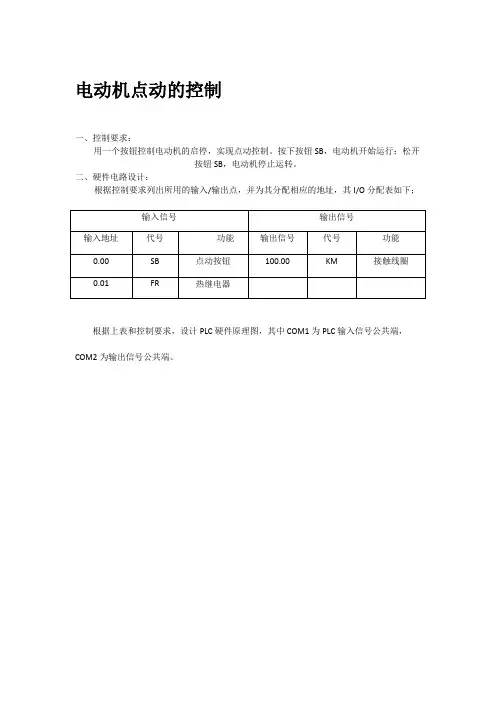
一、控制要求:
用一个按钮控制电动机的启停,实现点动控制。
按下按钮SB,电动机开始运行;松开
按钮SB,电动机停止运转。
二、硬件电路设计:
根据控制要求列出所用的输入/输出点,并为其分配相应的地址,其I/O分配表如下;
根据上表和控制要求,设计PLC硬件原理图,其中COM1为PLC输入信号公共端,COM2为输出信号公共端。
三、编程思路:
这个实例的编程,可以采用“点对点”控制,实现对PLC某一输出位的控制,即有一个触点直接控制一个输出位。
四、控制程序的设计:
根据要求设计控制梯形图
五、程序执行过程:
(1)、当按下按钮SB时,输入信号0.00有效,输出信号100.00为ON. 控制接触器KM 的线圈通电,电动机启动运行;当SB 断开时,输出信号100.00为OFF, 控制接触器线圈断电,电动机运行。
(2)、当电动机过载时热继电器动作,输入信号0.01断开使100.00复位,切断KM的线圈回路,达到对电机过载保护的目的。
六、编程心得:
程序设计中,输入信号0.01采用的动断触电,对于PLC输入信号的内部状态取决于外部端子的状态。
对于PLC的输入信号,外部端子接线状态对应内部的状态有两种,PLC输入端子接成动断触点,PLC在使用时其内部触点已经有效,因此应使用动合触点,这样的程序设计更加可靠,当电动机发生过载时,FR的触点动作,使输入信号0.01断开,此时若输入信号0.01有效,电动机也无法启动。
电动机点动控制原理电动机点动控制是一种常见的电机控制方式,它通过控制电动机的启停和转向来实现对设备的精准控制。
本文将介绍电动机点动控制的原理及其应用。
电动机点动控制的原理主要包括电路控制和逻辑控制两个方面。
电路控制是通过控制电动机的供电电路来实现对电机的启停和转向。
逻辑控制则是通过控制逻辑电路或者PLC等控制器来实现对电机的点动控制。
下面将分别介绍这两个方面的原理。
首先是电路控制。
电动机的启停控制通常通过接触器或者电磁起动器来实现。
当需要启动电动机时,控制电路闭合,电动机接通电源,从而启动电机;当需要停止电动机时,控制电路断开,电动机断开电源,从而停止电机的运行。
而电动机的转向控制则通过接触器或者电磁起动器的控制回路来实现,通过改变控制回路中的接线方式,可以实现电动机的正转、反转和制动等操作。
其次是逻辑控制。
逻辑控制通常通过PLC等可编程逻辑控制器来实现。
在PLC中,可以通过编程来实现对电动机的点动控制,通过设定不同的逻辑条件和动作指令,可以实现对电动机的启停和转向控制。
例如,可以通过编程实现按下按钮启动电机,再次按下按钮停止电机;也可以通过编程实现按下不同的按钮来实现电机的正转、反转和制动等操作。
电动机点动控制在工业自动化领域有着广泛的应用。
它可以实现对设备的精准控制,提高生产效率,减少人力成本。
例如,在流水线上,可以通过电动机点动控制来实现对输送带、机械臂等设备的启停和转向控制;在机械加工设备上,可以通过电动机点动控制来实现对主轴的启停和转向控制;在物流仓储设备上,可以通过电动机点动控制来实现对提升机、输送机等设备的启停和转向控制。
总之,电动机点动控制是一种重要的电机控制方式,它通过电路控制和逻辑控制来实现对电动机的精准控制,广泛应用于工业自动化领域,为生产提供了便利和效率。
希望本文对电动机点动控制的原理及应用有所帮助。

电动机的点动及连续控制实验心得电动机是一种常用的电力驱动装置,广泛应用于工业、交通、农业等领域。
在电机控制的实验中,点动和连续控制是两种常用的控制方式。
在本次实验中,我们学习了这两种控制方式,并进行了实验验证,本文将就此分享一下我的心得体会。
点动控制是将电机从静止状态逐步加速至设定速度的过程。
在本次实验中,我们使用了PLC控制器来实现点动控制。
通过PLC控制器的编程,我们可以设置电机的加速时间、加速度、启动电压等参数,使电机从静止状态开始逐渐加速,直至达到设定的速度。
在实验中,我发现点动控制具有以下优点:1.稳定性好:由于点动控制是逐步加速的过程,因此电机的启动过程相对平稳,不容易出现过大的启动冲击,从而保证了电机的稳定性。
2.控制灵活:通过PLC编程,可以根据需要设置电机的加速时间、加速度等参数,使得点动控制具有较大的灵活性,可以满足不同的控制需求。
3.节约能源:由于点动控制是逐步加速的过程,因此相较于直接启动电机,点动控制能够更加节约能源,降低运行成本。
但是,点动控制也存在一些缺点:1.启动时间较长:由于点动控制是逐步加速的过程,因此启动时间相对较长,对于某些需要快速启动的应用场合可能不太适用。
2.控制复杂度较高:由于点动控制需要通过编程设置多个参数,因此其控制复杂度较高,需要一定的技术水平和编程能力。
接下来,我们进行了连续控制的实验。
连续控制是将电机控制在一定的速度范围内进行连续运转的过程。
在实验中,我们使用了PID 控制器来实现连续控制。
PID控制器是一种常用的控制器,其基本原理是通过不断调整控制量的输出值,使其与设定值之间保持一定的误差,从而实现对系统的控制。
在本次实验中,我们将PID控制器与电机连接,并通过编程设置PID控制器的参数,使得电机能够在一定的速度范围内进行连续运转。
在实验中,我发现连续控制具有以下优点:1.精度高:由于PID控制器能够根据设定值和实际值之间的误差不断调整控制量的输出值,因此连续控制具有较高的精度,能够满足对系统控制精度要求较高的应用场合。
1.实验目的
通过一个实验,实现以下内容的熟练操作和使用。
●电动机电动控制的方法
●自锁功能的作用及使用方法
●程序编译及调试
2.实验地点及设备
9B-301 西门子S7-1200PLC实验平台
3.实验内容及要求
(1)电动机点动控制
编写电机点动控制的启停程序,实现手动控制电机启动,松手电机停止的简单控制。
分配I/O,编写程序并调试。
(2)电动机自锁控制
编写电机自锁控制的程序,实现手动控制电机启动,松手后电机仍保持运行,按下停止按钮后电机停止。
分配I/O,编写程序并调试。
4.实验步骤
(1)首先,先根据要求在草稿纸上画出可以解决问题的电路图;
(2)根据电路图在TIA Portal v11 组态软件中画出电路图;
(3)在西门子S7-1200PLC实验平台上链接电路;
(4)下载并验证。
5.实验记录(分析)及讨论
(一)电路图
(由于没拍到程序图,用草稿上的电路图)
(二)分析
由程序段(1)知,当I0.0按动后,线圈Q0.0接通,LED常亮。
当松开I0.0,Q0.0不接通,LED熄灭。
由此实现点动功能。
由程序段(2)知,当I0.0按动后,线圈Q0.0接通,LED常亮,同时由于线圈Q0.0接通,常开开关Q0.0接通,使电路持续接通,实现了自锁。
当按下常闭开关I0.1,电路断开,即可使电机停止。
(三)结果
经过在实验台上连线验证,发现实验现象与分析相符合,即验证了我们的程序与分析是正确的。
电动机点动控制原理
电动机点动控制是指通过控制信号,使电动机能够在短时间内按照预定的步进或连续方式进行运动。
其原理主要涉及以下几个方面:
1. 控制信号发生器:通过控制信号发生器产生控制信号,控制电动机的启停、运动方向及速度等参数。
常见的控制信号发生器包括微处理器、PLC、触发电路等。
2. 控制电路:控制电路是负责将信号发生器产生的控制信号转化为电动机运动所需的电流或电压等参数。
控制电路中常用的元件包括继电器、触发器、电流控制器等。
3. 电动机保护装置:由于电动机在运行过程中可能会面临过载、过热等问题,因此需要配置相应的保护装置。
常见的保护装置有过载保护器、温度传感器、电流限制器等。
4. 动力装置:动力装置提供电动机所需的动力源,通常为交流电源或直流电源。
根据不同的应用场景和控制要求,动力装置可以采用不同的功率、电压和电流等参数。
5. 反馈信号:为了控制电动机的运动精度和稳定性,通常需要对电动机的运动状态进行反馈检测。
常见的反馈信号有位置、速度、加速度等。
通过以上原理和装置的配合,电动机点动控制可以实现对电动机的精确控制,从而满足特定的运动需求。
在实际应用中,电
动机点动控制广泛应用于自动化设备、机械加工、印刷设备等领域。