第3章 维纳滤波器
- 格式:pdf
- 大小:1.13 MB
- 文档页数:36
西安电子科技大学统计与自适应信号处理仿真学院:班级:学号:姓名:2013年12月FIR 维纳滤波器1维纳滤波原理概述维纳(Wiener )是用来解决从噪声中提取信号的一种过滤(或滤波)方法。
这种线性滤波问题,可以看做是一种估计问题或一种线性估计问题。
一个线性系统,如果它的单位样本响应为)(n h ,当输入一个随机信号)(n x ,且)()()(n v n s n x += (1) 其中)(n x 表示信号,)(n v )表示噪声,则输出)(n y 为∑-=mm n x m h n y )()()( (2)我们希望)(n x 通过线性系统)(n h 后得到的)(n y 尽量接近于)(n s ,因此称)(n y 为)(n s 的估计值,用^)(n s 表示,即^)()(n s n y = (3) 则维纳滤波器的输入—输出关系可用下面图1表示。
图1 维纳滤波器的输入—输出关系实际上,式(2)所示的卷积形式可以理解为从当前和过去的观察值)(n x ,)1(-n x ,)2(-n x …)(m n x -,…来估计信号的当前值^)(n s 。
因此,用)(n h 进行过滤问题实际上是一种统计估计问题。
一般地,从当前的和过去的观察值)(n x ,)1(-n x ,)2(-n x …估计当前的信号值^)()(n s n y =成为过滤或滤波;从过去的观察值,估计当前的或者将来的信号值)0)(()(^≥+=N N n s n y 称为外推或预测;从过去的观察值,估计过去的信号值)1)(()(^>-=N N n s n y 称为平滑或内插。
因此维纳滤波器又常常被称为最佳线性过滤与预测或线性最优估计。
这里所谓的最佳与最优是以最小均方误差为准则的。
如果我们分别以)(n s 与^)(n s 表示信号的真实值与估计值,而用)(n e 表示他们之间的误差,即)()()(^n s n s n e -= (4)显然)(n e 可能是正值,也可能是负值,并且它是一个随机变量。
维纳滤波器维纳滤波器(Wiener filter)是由数学家维纳(Rorbert Wiener)提出的一种以最小平方为最优准则的线性滤波器。
在一定的约束条件下,其输出与一给定函数(通常称为期望输出)的差的平方达到最小,通过数学运算最终可变为一个托布利兹方程的求解问题。
维纳滤波器又被称为最小二乘滤波器或最小平方滤波器,目前是基本的滤波方法之一。
维纳滤波是利用平稳随机过程的相关特性和频谱特性对混有噪声的信号进行滤波的方法,1942年美国科学家N.维纳为解决对空射击的控制问题所建立,是40年代在线性滤波理论方面所取得的最重要的成果。
目录编辑本段维纳滤波器维纳滤波从连续的(或离散的)输入数据中滤除噪声和干扰以提取有用信息的过程称为滤波,而相应的装置称为滤波器。
根据滤波器的输出是否为输入的线性函数,可将它分为线性滤波器和非线性滤波器两种。
滤波器研究的一个基本课题就是:如何设计和制造最佳的或最优的滤波器。
所谓最佳滤波器是指能够根据某一最佳准则进行滤波的滤波器。
20世纪40年代,维纳奠定了关于最佳滤波器研究的基础。
即假定线性滤波器的输入为有用信号和噪声之和,两者均为广义平稳过程且知它们的二阶统计特性,维纳根据最小均方误差准则(滤波器的输出信号与需要信号之差的均方值最小),求得了最佳线性滤波器的参数,这种滤波器被称为维纳滤波器。
在维纳研究的基础上,人们还根据最大输出信噪比准则、统计检测准则以及其他最佳准则求得的最佳线性滤波器。
实际上,在一定条件下,这些最佳滤波器与维纳滤波器是等价的。
因而,讨论线性滤波器时,一般均以维纳滤波器作为参考。
信号波形从被噪声污染中恢复称为滤波。
这是信号处理中经常采用的主要方法之一,具有十分重要的应用价值。
常用的滤波器是采用电感、电容等分立元件构成,如RC低通滤波器、LC谐振回路等。
但对于混在随机信号中的噪声滤波,这些简单的电路就不是最佳滤波器,这是因为信号与噪声均可能具有连续的功率谱。

维纳滤波器的基本原理维纳滤波器是一种经典的信号处理方法,它被广泛应用于噪声抑制、图像恢复和语音处理等领域。
维纳滤波器通过将观测信号和噪声之间的相关性纳入考虑,可以有效地提高信号的质量,减少噪声的干扰。
维纳滤波器的基本原理可以用以下几个步骤来描述。
首先,我们需要了解原始信号和噪声的统计特性。
通过对观测信号和噪声进行建模,我们可以估计它们的自相关函数和互相关函数。
这些统计参数将帮助我们理解噪声的特性以及其对原始信号的影响。
接下来,我们需要构建一个滤波器,该滤波器将输入观测信号作为输入,并通过滤波过程来降低噪声的影响。
在构建滤波器时,我们需要考虑两个主要要素:信号的自相关函数和噪声的自相关函数。
信号的自相关函数描述了信号中不同时间点之间的相关性,而噪声的自相关函数描述了噪声本身的特性。
维纳滤波器的关键思想是最小化输出信号和原始信号之间的均方误差,同时最大化输出信号和原始信号之间的相关性。
通过将这两个目标结合起来,我们可以设计一个最优的滤波器,使输出信号尽可能接近原始信号,并且削弱噪声的干扰。
在滤波器的设计中,我们需要根据原始信号和噪声的统计特性来确定一些参数。
例如,我们可以利用原始信号的自相关函数和噪声的自相关函数来计算滤波器的频率响应。
通过调整滤波器的参数,我们可以改变滤波器的频率响应,从而实现对信号和噪声之间相关性的优化。
最后,我们需要通过将观测信号传递给维纳滤波器来得到滤波后的输出信号。
维纳滤波器使用输入信号的统计特性以及滤波器的参数来调整输出信号的频谱。
这样,滤波器可以通过增大信号和减小噪声之间的相关性来最大限度地提高输出信号的质量。
总之,维纳滤波器是一种通过考虑原始信号和噪声之间的相关性来优化信号质量的方法。
它的基本原理是最小化输出信号和原始信号之间的均方误差,并最大化输出信号和原始信号之间的相关性。
通过合理地设计滤波器的参数,维纳滤波器可以在信号处理领域中发挥重要作用,提高信号的质量,并减少噪声的干扰。
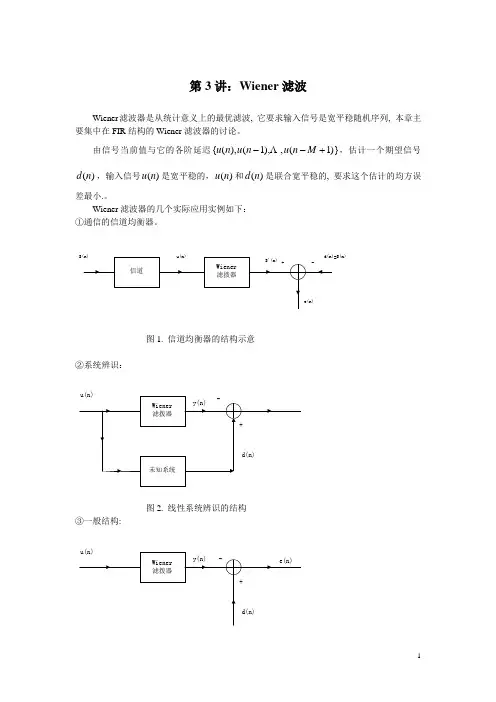
第3讲:Wiener 滤波Wiener 滤波器是从统计意义上的最优滤波, 它要求输入信号是宽平稳随机序列, 本章主要集中在FIR 结构的Wiener 滤波器的讨论。
由信号当前值与它的各阶延迟)}1(,),1(),({+--M n u n u n u ,估计一个期望信号)(n d ,输入信号)(n u 是宽平稳的,)(n u 和)(n d 是联合宽平稳的, 要求这个估计的均方误差最小.。
Wiener 滤波器的几个实际应用实例如下: ①通信的信道均衡器。
图1. 信道均衡器的结构示意②系统辨识:图2. 线性系统辨识的结构③一般结构:图3. Wiener 滤波器的一般结构Wiener 滤波器的目的是求最优滤波器系数o w ,使⎥⎦⎤⎢⎣⎡-==22)(ˆ)(]|)([|)(n d n d E n e E n J 最小。
§3.1 从估计理论观点导出Wiener 滤波FIR 结构(也称为横向)的Wiener 滤波器的核心结构如图4所示.图4. 横向Wiener 滤波器为了与第2讲中估计理论一致,假设信号,滤波器权值均为实数由输入)(n u 和它的1至(M-1)阶延迟,估计期望信号)(n d ,确定权系数}1,0,{-=M i w i 使估计误差均方值最小,均方误差定义为:]))(ˆ)([(2n dn d E J -= 这里估计)(ˆn d写为: ∑-=-⋅=10)()(ˆM k k k n u w n d除了现在是波形估计外,与线性Bayesian 估计一一对应。
∑-=⋅=1)(ˆN k kk x a θ∑-=-⋅=10)()(ˆM k k k n u w n dT N a a a ],,[110-= aT N w w w ],,[110-= wT N x x x )]1(),1(),0([-= xT M n u n u n u n )]1(),1(),([)(+--= uθ)(n dxx C R (零均值假设)θx CT M p p p n d n E )]1(),1(),0([)]()([+--=⋅= u P这里)])()([)((n d k n u E k p -=-, Wiener 滤波与线性Bayesian 估计变量之间具有一一对应关系, 设最优滤波器系数为0w ,由线性Bayesian 估计得到Wiener 滤波器系数对应式:p w C =⋅⇒=⋅0R C x xx θa上式后一个方程称为Wiener-Hopf 方程, 或p w ⋅=⇒=--101R C C x xx θa)()()(ˆˆ011n n R n d C C T T xx T x u u ⋅=⋅⋅=⇒⋅⋅=--w p x θθ p p ⋅⋅-=⇒⋅⋅-=--12min 1)ˆ(R J C C C C Bmse T d x xx T x σθθθθθ结论:1) Wiener 滤波器是线性FIR 滤波器中的最优滤波器,但非线性滤波可能会达到更好结果。
维纳滤波器的原理维纳滤波器是一种经典的信号处理滤波器,其原理基于最小均方误差准则,旨在通过优化滤波器的系数来最小化输出信号与期望信号之间的误差。
维纳滤波器的设计思想是将输入信号分解为两个部分:有用信号和噪声信号。
然后,通过滤波器的作用,使得输出信号中噪声的影响最小化。
维纳滤波器的设计过程可以分为两个主要步骤:信号建模和滤波器系数计算。
首先,需要对输入信号进行建模,以便准确地描述信号的统计特性。
常用的信号模型有平稳信号模型和非平稳信号模型。
在信号建模的过程中,需要估计信号的自相关函数和互相关函数,这些函数反映了信号的统计特性。
接下来,在信号建模的基础上,可以使用维纳滤波器的最小均方误差准则来计算滤波器的系数。
最小均方误差准则的基本思想是使得输出信号的均方误差最小化。
通过求解最小均方误差准则的最优化问题,可以得到滤波器的最优系数,进而实现对输入信号的滤波。
维纳滤波器的原理可以用如下的几个步骤来总结:1. 信号建模:对输入信号进行建模,估计信号的统计特性,如自相关函数和互相关函数。
2. 误差计算:计算输出信号与期望信号之间的误差。
3. 最小均方误差准则:使用最小均方误差准则来优化滤波器的系数,使得输出信号的均方误差最小化。
4. 系数计算:通过求解最小均方误差准则的最优化问题,得到滤波器的最优系数。
5. 滤波器设计:根据计算得到的滤波器系数,设计出具体的滤波器结构。
维纳滤波器在实际应用中具有广泛的应用。
例如,在通信系统中,维纳滤波器可以用于抑制信道中的噪声,提高信号的质量。
在图像处理领域,维纳滤波器可以用于去除图像中的噪声,提高图像的清晰度。
此外,维纳滤波器还可以用于语音增强、雷达信号处理等领域。
维纳滤波器是一种基于最小均方误差准则的经典滤波器。
通过对输入信号的建模和优化滤波器的系数,维纳滤波器可以有效地抑制噪声,提高信号的质量。
维纳滤波器在各种信号处理领域中都有广泛的应用,为我们提供了一种有效的信号处理工具。
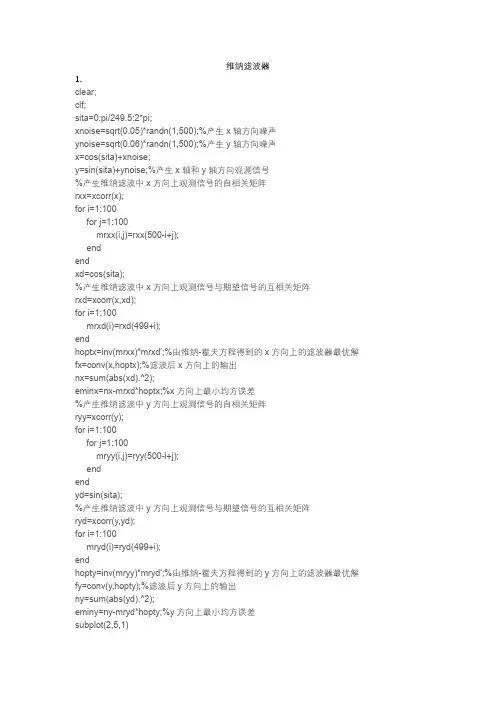
维纳滤波器1.clear;clf;sita=0:pi/249.5:2*pi;xnoise=sqrt(0.05)*randn(1,500);%产生x轴方向噪声ynoise=sqrt(0.06)*randn(1,500);%产生y轴方向噪声x=cos(sita)+xnoise;y=sin(sita)+ynoise;%产生x轴和y轴方向观测信号%产生维纳滤波中x方向上观测信号的自相关矩阵rxx=xcorr(x);for i=1:100for j=1:100mrxx(i,j)=rxx(500-i+j);endendxd=cos(sita);%产生维纳滤波中x方向上观测信号与期望信号的互相关矩阵rxd=xcorr(x,xd);for i=1:100mrxd(i)=rxd(499+i);endhoptx=inv(mrxx)*mrxd';%由维纳-霍夫方程得到的x方向上的滤波器最优解fx=conv(x,hoptx);%滤波后x方向上的输出nx=sum(abs(xd).^2);eminx=nx-mrxd*hoptx;%x方向上最小均方误差%产生维纳滤波中y方向上观测信号的自相关矩阵ryy=xcorr(y);for i=1:100for j=1:100mryy(i,j)=ryy(500-i+j);endendyd=sin(sita);%产生维纳滤波中y方向上观测信号与期望信号的互相关矩阵ryd=xcorr(y,yd);for i=1:100mryd(i)=ryd(499+i);endhopty=inv(mryy)*mryd';%由维纳-霍夫方程得到的y方向上的滤波器最优解fy=conv(y,hopty);%滤波后y方向上的输出ny=sum(abs(yd).^2);eminy=ny-mryd*hopty;%y方向上最小均方误差subplot(2,5,1)plot(xd);title('x方向期望信号');subplot(2,5,2)plot(xnoise);title('x方向噪声信号');subplot(2,5,3)plot(x);title('x方向观测信号');subplot(2,5,4)n=0:500;plot(n,eminx);title('x方向最小均方误差');subplot(2,5,5)n=0:598;plot(n,fx);title('x方向滤波后信号');subplot(2,5,6)plot(yd);title('y方向期望信号');subplot(2,5,7)plot(ynoise);title('y方向噪声信号');subplot(2,5,8)plot(y);title('y方向观测信号');subplot(2,5,9)n=0:500;plot(n,eminy);title('y方向最小均方误差');subplot(2,5,10)n=0:598;plot(n,fy);title('y方向滤波后信号'); figure;plot(xd,yd,'k');%期望信号hold on ;plot(x,y,'b:');%观测信号hold on;plot(fx,fy,'g-');title('最终结果');。
维纳滤波器(第二讲)维纳去卷积•一般的去卷积并不考虑噪声,因此,当有噪声时,去卷积传递函数(在高频时它的幅度值常常很大)是不实用的。
图11.17表示在去卷积之后紧跟着维纳滤波器。
期望的信号s(t)首先被一个冲激响应为f(t)的线性系统所退化,其输出又被附加的噪声源n(t)所污染形成了观察到的信号x(t).维纳滤波在图象上的应用匹配检测器举例•第一种情况:假定噪声的频谱是白的;即因为式(99)中的C 是任意的常数,因此我们可以令,在这种情况下,匹配检测器变为:K 0(s) = M*(s)2)(N s P n =20N C =)()()}({)(2*1t m ds e s M t K t k st j o o −==ℑ=∫∞∞−−π•对于白噪声情况,冲激响应就是信号本身的反转。
输出端的信号分量为:而噪声分量为:因为式(107)中K 0(t)正好是我们企图信号的反转,所以匹配滤波器K 0(t)只是一个互相关算子,它把进来的信号加噪声与已知形式的期望信号做相关运算,所得输出为)()()()(*)()(t R d t m m t k t m t u m o −=+−==∫∞∞−τττ)()()()(*)()(t R d t m n t k t n t v mn o −=+−==∫∞∞−τττ)()()()()(t R t R t v t u t y mn m −+−=+=•矩形脉冲检测器假定,即设计用来检测淹没在白的矩形脉冲的匹配检测器。
还假定输入是x(t) = s(t)+ n(t),这里,n(t)是白噪声。
我们知道矩形脉冲的自相关函数由下式给出:滤波器的输出就是:)()(t t m C =)()(T t t s −=C )()(*)()(ττΛ=∏∏=t t R x )()()(t R T t t y mn +−Λ=•从图11.23可以看出匹配检测器是如何抑制噪声而对信号做出响应。
输出有一峰值出现在信号的t=T时刻,但在其他的地方,幅度值相当小。
维纳滤波器的原理和应用维纳滤波器简介维纳滤波器是一种经典的信号处理滤波器,它基于维纳滤波理论,通过对信号进行统计分析和模型建立,实现信号的优化处理。
维纳滤波器能够降低信号中的噪声成分,提高信号的质量和可靠性,在许多领域中得到广泛的应用。
维纳滤波器原理维纳滤波器的原理是基于最小均方误差的思想,通过最小化信号与噪声之间的均方误差,实现对信号的最优估计。
其数学模型可以表示为:维纳滤波器原理公式维纳滤波器原理公式其中,x(n)是输入信号,h(n)是滤波器的冲激响应,y(n)是滤波器的输出信号,w(n)是噪声信号,E[w(n)w(m)]是噪声信号的自相关函数,Rxx(k)是输入信号的自相关函数,Rxy(k)是输入信号和噪声之间的互相关函数。
维纳滤波器根据输入信号、噪声信号和系统参数的统计特性,通过最小化均方误差优化系统参数,使得滤波器能够有效地抑制噪声成分,提取出原始信号。
维纳滤波器的设计需要基于输入信号和噪声的统计特性的准确估计,以及对滤波器参数的优化求解。
维纳滤波器应用维纳滤波器在实际应用中具有广泛的用途,以下列举了几个常见的应用领域:1.图像去噪:维纳滤波器可以应用于数字图像处理中的去噪问题,通过最小化图像中的噪声与图像信号的误差,实现对图像噪声的抑制,提高图像的质量和清晰度。
2.语音增强:在语音信号处理中,维纳滤波器可以应用于语音增强问题,通过对语音信号进行建模和分析,实现对噪声的抑制,提高语音信号的清晰度和可听性。
3.视频恢复:在视频信号处理中,维纳滤波器可以应用于视频恢复问题,通过对视频帧进行建模和分析,实现对噪声和失真的抑制,提高视频的质量和稳定性。
4.无线通信:在无线通信系统中,维纳滤波器可以应用于信号解调和接收问题,通过对接收信号进行建模和分析,实现对噪声和干扰的抑制,提高信号的可靠性和传输速率。
5.生物信号处理:在生物医学信号处理中,维纳滤波器可以应用于生物信号的去噪和增强问题,通过对生物信号进行建模和分析,实现对噪声和干扰的抑制,提高生物信号的可读性和分析能力。
维纳滤波实验——噪声中语音信号的恢复班级:学号:姓名:实验内容信号从发送者传送到接受者往往受到几种形式的变形而削弱,维纳滤波是一种从接收的原始信号中恢复信号的方法。
给定信号为chiep信号(鸟叫声),数据文件为chirp.mat,用频域法实现维纳滤波。
步骤如下:1、产生信号s(n)和观测z(n),信号为chiep信号,观测为信号叠加上高斯白噪声。
2、估计信号s(n)和z(n)的功率谱,计算维纳滤波的传递函数。
3、计算输入z(t)和输出y(t)的频谱,并对输出信号求反变换得到时域的输出信号。
用到的函数:装入数据文件,Load傅里叶变换与反变换,fftn ifftn谱估计,periodogra一.实验结果用频域法在MATLAB仿真文件为:clear all;load('chirp','y','Fs');z=awgn(y,20); %加噪声subplot(1,3,1); %画语音信号y的时域图plot(y);title('语音信号y的时域图');subplot(1,3,2) %画加噪后的观测信号图plot(z);title('加噪后的观测信号');X=fftn(y);Px1=X.*conj(X)/50; %原信号频谱密度X=fftn(z);Px2=X.*conj(X)/50; %观测信号频谱密度H=Px1\Px2; %传递函数py=Px2.*H; %输出信号的频谱yn=ifftn(py); %输出信号subplot(1,3,3)plot(yn);title('输出信号');sound(y); %原信号sound(z); %加了噪声的测试信号 sound(yn) %输出信号得到的结果图:原语音信号的时域图语音加噪后的观测信号时域图输出信号的时域图二.实验结果分析及心得体会维纳(Wiener )滤波是一种从噪声中提取引号波形最基本的方法,适用于需要从噪声中分离出的有用信号是整个信号(波形),而不只是它的几个参量。