重庆大学自动化学院《844自动控制原理二》历年考研真题汇编
- 格式:pdf
- 大小:23.38 MB
- 文档页数:49

第一章绪论重点:1.自动控制系统的工作原理;2.如何抽象实际控制系统的各个组成环节;3.反馈控制的基本概念;4.线性系统(线性定常系统、线性时变系统)非线性系统的定义和区别;5.自动控制理论的三个基本要求:稳定性、准确性和快速性。
第二章控制系统的数学模型重点:1.时域数学模型--微分方程;2.拉氏变换;3.复域数学模型--传递函数;4.建立环节传递函数的基本方法;5.控制系统的动态结构图与传递函数;6.动态结构图的运算规则及其等效变换;7.信号流图与梅逊公式。
难点与成因分析:1.建立物理对象的微分方程由于自动化专业的本科学生普遍缺乏对机械、热力、化工、冶金等过程的深入了解,面对这类对象建立微分方程是个难题,讲述时2.动态结构图的等效变换由于动态结构图的等效变换与简化普遍只总结了一般原则,而没有具体可操作的步骤,面对变化多端的结构图,初学者难于下手。
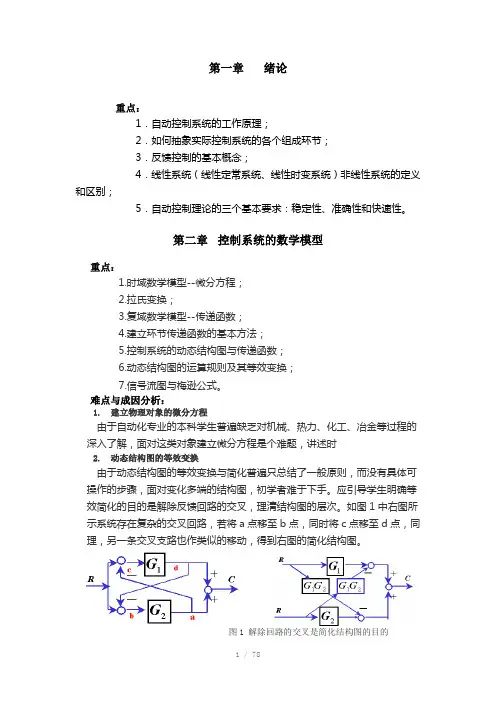
应引导学生明确等效简化的目的是解除反馈回路的交叉,理清结构图的层次。
如图1中右图所示系统存在复杂的交叉回路,若将a点移至b点,同时将c点移至d点,同理,另一条交叉支路也作类似的移动,得到右图的简化结构图。
图1 解除回路的交叉是简化结构图的目的3. 梅逊公式的理解梅逊公式中前向通道的增益K P 、系统特征式∆及第K 条前向通路的余子式K ∆之间的关系仅靠文字讲述,难于理解清楚。
需要辅以变化的图形帮助理解。
如下图所示。
图中红线表示第一条前向通道,它与所有的回路皆接触,不存在不接触回路,故11=∆。
第二条前向通道与一个回路不接触,回路增益44H G L -=,故4421H G +=∆。
第三条前向通道与所有回路皆接触,故13=∆。
第三章 时域分析法重点:1. 一、二阶系统的模型典型化及其阶跃响应的特点;2. 二阶典型化系统的特征参数、极点位置和动态性能三者间的相互关系;3. 二阶系统的动态性能指标(r t ,p t ,%σ,s t )计算方法;4. 改善系统动态性能的基本措施;5. 高阶系统主导极点的概念及高阶系统的工程分析方法;6. 控制系统稳定性的基本概念,线性定常系统稳定的充要条件;7. 劳斯判据判断系统的稳定性;8. 控制系统的误差与稳态误差的定义;9. 稳态误差与输入信号和系统类型之间的关系;10. 计算稳态误差的终值定理法和误差系数法;11. 减少或消除稳态误差的措施和方法。
目 录2014年重庆大学841信号与系统考研真题2013年重庆大学841信号与线性系统考研真题2012年重庆大学841信号与系统考研真题2010年重庆大学842信号与线性系统考研真题及详解2009年重庆大学842信号与线性系统考研真题2008年重庆大学842信号与线性系统考研真题2007年重庆大学443信号与线性系统考研真题2006年重庆大学443信号与线性系统考研真题2005年重庆大学450信号与系统考研真题2004年重庆大学450信号与系统考研真题2003年重庆大学450信号与系统考研真题2002年重庆大学591信号与线性系统考研真题2001年重庆大学555信号与线性系统考研真题2000年重庆大学103信号与线性系统考研真题2014年重庆大学841信号与系统考研真题重庆大学2014年硕士研宪生入学考属械题科目代码;四1科目名称:信号与系统总分:150分特别提醒:所有答案一律写在答题纸上,直接写在试题或草稿纸上的无效,-、(每小瞻10分,共计SQ分)回答下列问题1.戮性时不变系统具有哪些特性?最基本的特性是什么,为什么?2.什么坦。
一状态和S状态?系统有无起始点的跳变量(即从0.到3,状态的转换)怎么判断?3.什农是理想抽样?何为奈童斯特(Nyquist)额率?简述时域抽样定理’4.一个因果稳定系统,其零极点是否都在左半E平面?为什久?5.如果己知电路结构和参数,如何直观列写状态方程,堵写出一般步骤,二、(】5分)已知某线性时不变系统,激励为勺*)=m(r)时,零状态响应匕(*)如图1所示"若激励为如图2所示曲)时,试用时域法计算:(1)单位冲激响应M,}:<2)零状态响应r(r);(3)画出零状态畴应波形*2 [卜W)A_,2-],的)0123401234图1&2三'(】S分)周期单位冲激序列为(0=££*-耳7;)的波形如图3所示.试求:(1)为。
目 录2014年浙江大学845自动控制原理考研真题(回忆版)2013年浙江大学845自动控制原理考研真题(回忆版)2012年浙江大学自动控制原理考研真题(回忆版)2011年浙江大学845自动控制原理考研真题2010年浙江大学自动控制原理考研真题及详解2009年浙江大学自动控制原理考研真题(回忆版)2008年浙江大学845自动控制原理考研真题2007年浙江大学452自动控制原理考研真题2006年浙江大学452自动控制原理考研真题2005年浙江大学452自动控制原理考研真题2004年浙江大学452自动控制原理考研真题及详解2003年浙江大学457自动控制原理考研真题2002年浙江大学自动控制原理考研真题2001年浙江大学581自动控制原理考研真题及详解2014年浙江大学845自动控制原理考研真题(回忆版)一、已知一个共轭极点的阻尼比在-1到0之间,求根轨迹的出射角。
二、已知A、B、C阵,其中A阵(5×5)是能控标准型阵。
求1.方程有几个极点在右半轴2.判断能控能观性三、求二型系统的相角裕度最大值时的K值。
四、一单回路负反馈系统,前线通道时(s+5)(s+10)(s+4),反馈通道是0.5s+1,已知阻尼比,求K值和稳态输出。
五、Z变换1.求脉冲传递函数2.输出Z变换六、已知一个双输入的状态空间方程七、双变量传递函数,分子一个a,分母一个k1.当k和a为什么情况下时,系统保持稳定2.画出根轨迹图八、伯德图里有两个二阶衰减振荡环节九、1.求传递函数2.状态反馈3.状态观测器极点都配制到-2r4.已知超调量和tp的限制,求阻尼比和wn 5.当观测器反应速度比反馈快3倍2013年浙江大学845自动控制原理考研真题(回忆版)一、已知单位阶跃相应的曲线为一个单调递增最后趋于稳态的曲线,求系统的传递函数和微分方程。
二、已知一个带干扰的系统方框图1.化简方框图求输入和误差传递函数。
2.要求干扰输入时,输出不受干扰的影响。
重庆大学2013年硕士研究生入学考试自命题参考书目考试科目及参考书目111 单独考试思想政治理论《政治经济学》曾国平编重庆大学出版社 2003年版《邓小平理论》贺荣伟编重庆大学出版社 2003年版242 俄语(二外)《大学俄语简明教程》(第二外语用)张宝钤 钱晓慧 高教出版社243 日语(二外)《标准日本语》(新版)初级1、2册,中级第1册(前15课)人民教育出版社244 德语(二外)《德语》(上下)吴永岸华宗德上海外语教育出版社245 法语(二外)《简明法语教程》(上下)孙辉331 社会工作原理1、王思斌主编,《社会工作概论》(第二版),高等教育出版社2006年版。
2、关信平主编,《社会政策概论》,高等教育出版社2009年版。
3、赵泽洪:《现代社会学》第2版重庆大学出版社334 新闻与传播专业综合能力《中国新闻传播史》,方汉奇,中国人民大学出版社,2002年《外国新闻传播史纲要》,陈力丹、王辰瑶,中国人民大学出版社,2008年;新闻学导论》李良荣著,高等教育出版社,1999年;《传播学教程》郭庆光编,中国人民大学出版社,1999年338生物化学此科目为全国统考科目,建议参考王镜岩主编《生物化学》(第3版)等进行复习346 体育综合《学校体育学》李祥主编高等教育出版社 2003年9月《运动训练学》田麦久编人民体育出版社 2000年《运动生理学》人民体育出版社(体育院校通用教材)2002年9月354 汉语基础《现代汉语》(增订本)黄伯荣、廖序东主编,高等教育出版社;《古代汉语》王力主编,中华书局;《语言学纲要》,叶蜚声、徐通锵著,北京大学出版社。
357 英语翻译基础《实用翻译教程》(第3版)冯庆华编著上海外语教育出版社 2010年2月;《英译中国现代散文选》(1-3册)张培基译注上海外语教育出版社2007年11月;《当代英国翻译理论》廖七一等编著,湖北教育出版社,2001年3月;《西方翻译理论精选》申雨平编,外语教学与研究出版社,2002年4月;《非文学翻译理论与实践》李长栓中国对外翻译出版公司 2005年6月。
第一章绪论重点:1.自动控制系统的工作原理;2.如何抽象实际控制系统的各个组成环节;3.反馈控制的基本概念;4.线性系统(线性定常系统、线性时变系统)非线性系统的定义和区别;5.自动控制理论的三个基本要求:稳定性、准确性和快速性。
第二章控制系统的数学模型重点:1.时域数学模型--微分方程;2.拉氏变换;3.复域数学模型--传递函数;4.建立环节传递函数的基本方法;5.控制系统的动态结构图与传递函数;6.动态结构图的运算规则及其等效变换;7.信号流图与梅逊公式。
难点与成因分析:1.建立物理对象的微分方程由于自动化专业的本科学生普遍缺乏对机械、热力、化工、冶金等过程的深入了解,面对这类对象建立微分方程是个难题,讲述时2.动态结构图的等效变换由于动态结构图的等效变换与简化普遍只总结了一般原则,而没有具体可操作的步骤,面对变化多端的结构图,初学者难于下手。
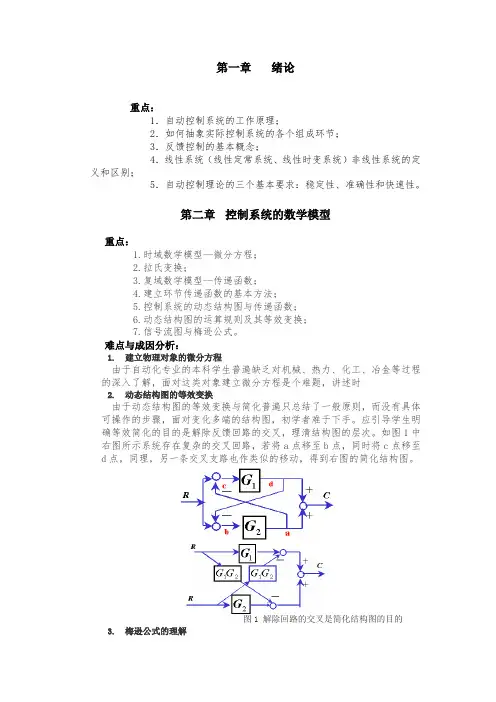
应引导学生明确等效简化的目的是解除反馈回路的交叉,理清结构图的层次。
如图1中右图所示系统存在复杂的交叉回路,若将a点移至b点,同时将c点移至d点,同理,另一条交叉支路也作类似的移动,得到右图的简化结构图。
图1 解除回路的交叉是简化结构图的目的3.梅逊公式的理解梅逊公式中前向通道的增益K P 、系统特征式∆及第K 条前向通路的余子式K ∆之间的关系仅靠文字讲述,难于理解清楚。
需要辅以变化的图形帮助理解。
如下图所示。
图中红线表示第一条前向通道,它与所有的回路皆接触,不存在不接触回路,故11=∆。
第二条前向通道与一个回路不接触,回路增益44H G L -=,故4421H G +=∆。
第三条前向通道与所有回路皆接触,故13=∆。
第三章 时域分析法重点:1. 一、二阶系统的模型典型化及其阶跃响应的特点;2. 二阶典型化系统的特征参数、极点位置和动态性能三者间的相互关系;,s t)计算方法;3.二阶系统的动态性能指标(r t,p t,%4. 改善系统动态性能的基本措施;5. 高阶系统主导极点的概念及高阶系统的工程分析方法;6. 控制系统稳定性的基本概念,线性定常系统稳定的充要条件;7. 劳斯判据判断系统的稳定性;8. 控制系统的误差与稳态误差的定义;9. 稳态误差与输入信号和系统类型之间的关系;10. 计算稳态误差的终值定理法和误差系数法;11. 减少或消除稳态误差的措施和方法。
第一章绪论重点:1.自动控制系统的工作原理;2.如何抽象实际控制系统的各个组成环节;3.反馈控制的基本概念;4.线性系统(线性定常系统、线性时变系统)非线性系统的定义和区别;5.自动控制理论的三个基本要求:稳定性、准确性和快速性。
第二章控制系统的数学模型重点:1.时域数学模型--微分方程;2.拉氏变换;3.复域数学模型--传递函数;4.建立环节传递函数的基本方法;5.控制系统的动态结构图与传递函数;6.动态结构图的运算规则及其等效变换;7.信号流图与梅逊公式。
难点与成因分析:1.建立物理对象的微分方程由于自动化专业的本科学生普遍缺乏对机械、热力、化工、冶金等过程的深入了解,面对这类对象建立微分方程是个难题,讲述时2.动态结构图的等效变换由于动态结构图的等效变换与简化普遍只总结了一般原则,而没有具体可操作的步骤,面对变化多端的结构图,初学者难于下手。
应引导学生明确等效简化的目的是解除反馈回路的交叉,理清结构图的层次。
如图1中右图所示系统存在复杂的交叉回路,若将a点移至b点,同时将c点移至d点,同理,另一条交叉支路也作类似的移动,得到右图的简化结构图。
图1 解除回路的交叉是简化结构图的目的3.梅逊公式的理解梅逊公式中前向通道的增益K P 、系统特征式∆及第K 条前向通路的余子式K ∆之间的关系仅靠文字讲述,难于理解清楚。
需要辅以变化的图形帮助理解。
如下图所示。
图中红线表示第一条前向通道,它与所有的回路皆接触,不存在不接触回路,故11=∆。
第二条前向通道与一个回路不接触,回路增益44H G L -=,故4421H G +=∆。
第三条前向通道与所有回路皆接触,故13=∆。
第三章 时域分析法重点:1. 一、二阶系统的模型典型化及其阶跃响应的特点;2. 二阶典型化系统的特征参数、极点位臵和动态性能三者间的相互关系;3. 二阶系统的动态性能指标(r t ,p t ,%σ,s t )计算方法;4. 改善系统动态性能的基本措施;5. 高阶系统主导极点的概念及高阶系统的工程分析方法;6. 控制系统稳定性的基本概念,线性定常系统稳定的充要条件;7. 劳斯判据判断系统的稳定性;8. 控制系统的误差与稳态误差的定义;9. 稳态误差与输入信号和系统类型之间的关系;10. 计算稳态误差的终值定理法和误差系数法;11. 减少或消除稳态误差的措施和方法。