第3章连续运动结构设计
- 格式:ppt
- 大小:11.10 MB
- 文档页数:78

第三章 机构的结构理论本章介绍机构的组成理论,空间开链与空间闭链机构的自由度计算方法,平面机构的结构分析,运用图论讨论平面运动链的结构综合,介绍空间运动链的型综合,为机构类型的创新设计提供理论基础。
3-1机构的组成理论机构是表示机器组成情况和运动特征的数学模型。
机器中的运动部件转化为机构中的构 件,机器中各运动部件的可动连接转化为机构中的运动副。
这种表明机器组成和运动情况的 数学模型以机构运动简图的方式出现。
这样大大简化了机械的设计与分析的步骤,也促进了 机构学的迅猛发展。
机械种类繁多,结构复杂,特别是机械装置与电子装置、机械技术与液压技术、气动技术、传感技术、光电技术、控制技术的互相渗透结合,已形成机电一体化的高科技的系列化机械产品c 传统机械中的刚性运动部件有时可以被流体、弹性体、挠性体、磁场、电场等取代,所以,构件已不单纯为刚性体。
但本书的研究范围仍把构件局限在刚性体范畴之内。
无论科学技术如何发展,机械是水存的。
机械运动实现的主要手段仍以机械装置为主,所以,本书仍以刚性构件组成的机构为研究对象。
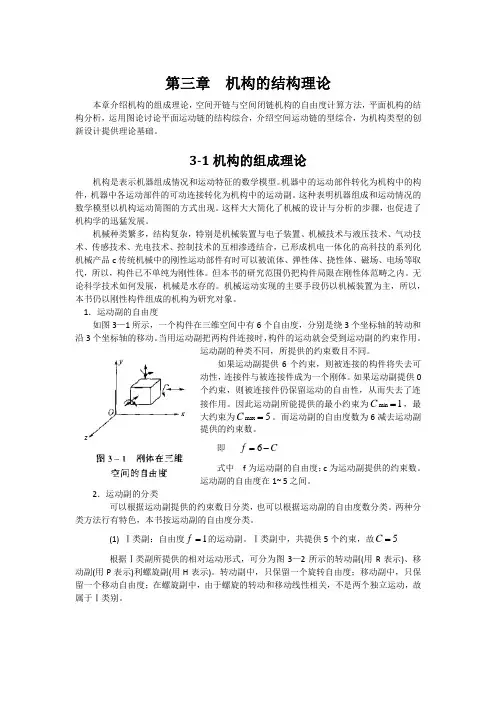
1.运动副的自由度如图3—1所示,一个构件在三维空间中有6个自由度,分别是绕3个坐标轴的转动和沿3个坐标轴的移动。
当用运动副把两构件连接时,构件的运动就会受到运动副的约束作用。
运动副的种类不同,所提供的约束数目不同。
如果运动副提供6个约束,则被连接的构件将失去可动性,连接件与被连接件成为一个刚体。
如果运动副提供0个约束,则被连接件仍保留运动的自由性,从而失去了连接作用。
因此运动副所能提供的最小约束为min 1C =,最大约束为max 5C =。
而运动副的自由度数为6减去运动副提供的约束数。
即 6f C =-式中 f 为运动副的自由度;c 为运动副提供的约束数。
运动副的自由度在1~ 5之间。
2.运动副的分类可以根据运动副提供的约束数日分类,也可以根据运动副的自由度数分类。
两种分类方法行有特色,本书按运动副的自由度分类。
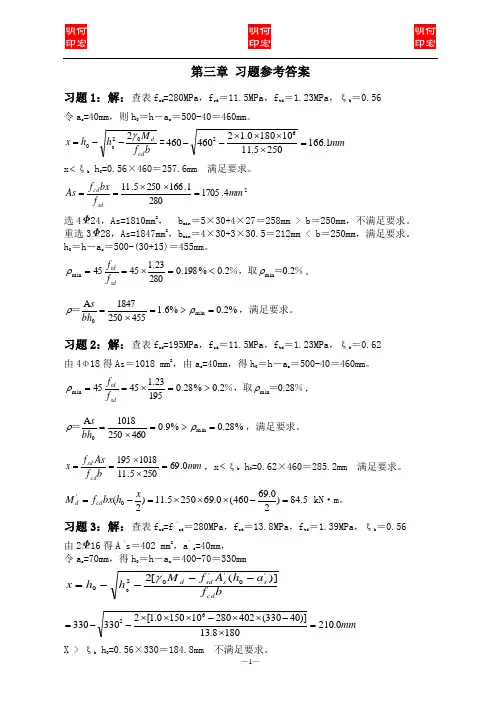
第三章 习题参考答案习题1:解:查表f sd =280MPa ,f cd =11.5MPa ,f td =1.23MPa ,ξb =0.56令a s =40mm ,则h 0=h -a s =500-40=460mm 。
b f M h h x cd d 02020γ--==mm 1.1662505.11101800.1246046062=⨯⨯⨯⨯--x <ξb h 0=0.56×460=257.6mm 满足要求。
24.17052801.1662505.11mm f bx f As sd cd =⨯⨯==选424,As=1810mm 2, b min =5×30+4×27=258mm > b =250mm ,不满足要求。
重选328,As=1847mm 2,b min =4×30+3×30.5=212mm < b =250mm ,满足要求。
h 0=h -a s =500-(30+15)=455mm 。
%=%,取2.02.0%198.028023.14545min min ρρ<=⨯==sd td f f 。
%2.0%6.14552501847A min 0=>=⨯=ρρbh s =,满足要求。
习题2:解:查表f sd =195MPa ,f cd =11.5MPa ,f td =1.23MPa ,ξb =0.62由4Φ18得As =1018 mm 2,由a s =40mm ,得h 0=h -a s =500-40=460mm 。
%=%,取28.02.0%28.019523.14545min min ρρ>=⨯==sd td f f , %28.0%9.04602501018A min 0=>=⨯=ρρbh s =,满足要求。
mm b f As f x cd sd 0.692505.111018195=⨯⨯==,x <ξb h 0=0.62×460=285.2mm 满足要求。