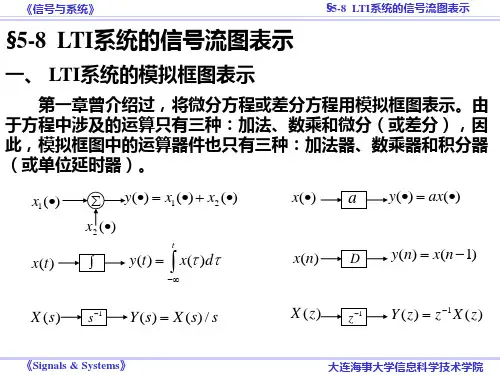
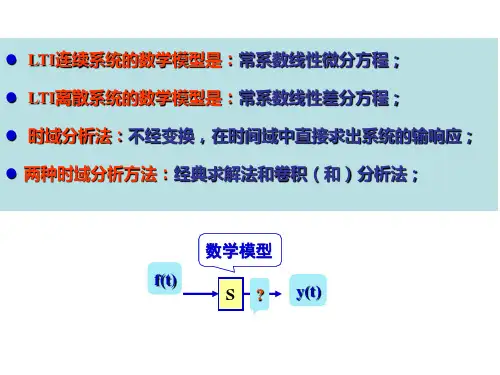
§5-8-LTI系统的信号流图表示
- 格式:ppt
- 大小:1.18 MB
- 文档页数:29
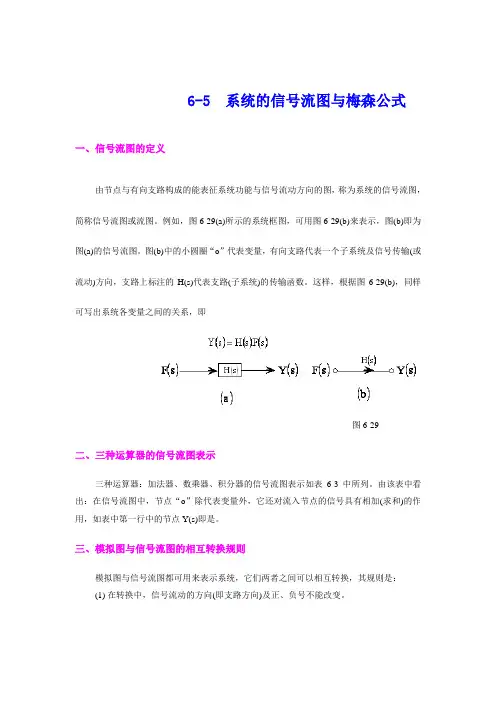
6-5 系统的信号流图与梅森公式一、信号流图的定义由节点与有向支路构成的能表征系统功能与信号流动方向的图,称为系统的信号流图,简称信号流图或流图。
例如,图6-29(a)所示的系统框图,可用图6-29(b)来表示,图(b)即为图(a)的信号流图。
图(b)中的小圆圈“o”代表变量,有向支路代表一个子系统及信号传输(或流动)方向,支路上标注的H(s)代表支路(子系统)的传输函数。
这样,根据图6-29(b),同样可写出系统各变量之间的关系,即图6-29二、三种运算器的信号流图表示三种运算器:加法器、数乘器、积分器的信号流图表示如表6-3中所列。
由该表中看出:在信号流图中,节点“o”除代表变量外,它还对流入节点的信号具有相加(求和)的作用,如表中第一行中的节点Y(s)即是。
三、模拟图与信号流图的相互转换规则模拟图与信号流图都可用来表示系统,它们两者之间可以相互转换,其规则是:(1) 在转换中,信号流动的方向(即支路方向)及正、负号不能改变。
(2) 模拟图(或框图)中先是“和点”后是“分点”的地方,在信号流图中应画成一个“混合”节点,如图6-30所示。
根据此两图写出的各变量之间的关系式是相同的,即。
(3) 模拟图(或框图)中先是“分点”后是“和点”的地方,在信号流图中应在“分点”与“和点”之间,增加一条传输函数为1的支路,如图6-31所示。
(4) 模拟图(或框图)中的两个“和点”之间,在信号流图中有时要增加一条传输函数为1的支路(若不增加,就会出现环路的接触,此时就必须增加),但有时则不需增加(若不增加,也不会出现环路的接触,此时即可以不增加。
见例6-17)。
(5) 在模拟图(或框图)中,若激励节点上有反馈信号与输入信号叠加时,在信号流图中,应在激励节点与此“和点”之间增加一条传输函数为1的支路(见例6-17)。
(6) 在模拟图(或框图)中,若响应节点上有反馈信号流出时,在信号流图中,可从响应节点上增加引出一条传输函数为1的支路(也可以不增加,见例6-17)。
一、填空题(部分可能模糊的已给出参考答案):1. 对时域函数进行拉氏变换:)(1t = 、t = 、at e -= 、sin t ω= 。
2. 自动控制系统对输入信号的响应,一般都包含两个分量,即一个是瞬态响应分量,另一个是稳态 _响应分量。
3. 在闭环控制系统中,通过检测元件将输出量转变成与给定信号进行比较的信号,这个信号称为_____反馈___。
4. 若前向通道的传递函数为G(s),反馈通道的传递函数为H(s),则闭环传递函数为___ __5. 函数f(t)=te 63-的拉氏变换式是 。
6. Bode 图中对数相频特性图上的-180°线对应于奈奎斯特图中的__负实轴_________。
7. 闭环系统稳定的充要条件是所有的闭环极点均位于s 平面的 右半平面 半平面。
8. 已知传递函数为2()k G s s=,则其对数幅频特性L (ω)在零分贝点处的频率数值为ω=9. 在系统开环对数频率特性曲线上,低频段部分主要由 积分 环节和 比例决定。
10. 惯性环节的传递函数11+Ts ,它的幅频特性的数学式是 ,它的相频特性的数学式是ωT arctan - 。
11. 传递函数的定义是对于线性定常系统,在 初始条件为零 的条件下,系统输出量的拉氏变换与 输入量的拉氏变换 之比。
12. 瞬态响应是系统受到外加作用激励后,从 初始 状态到 最终或稳定 状态的响应过程。
13. 判别系统稳定性的出发点是系统特征方程的根必须为 负实根或负实部的复数根 ,即系统的特征根必须全部在 复平面的左半平面 是系统稳定的充要条件。
14. I 型系统G s K s s ()()=+2在单位阶跃输入下,稳态误差为 0 ,在单位加速度输入下,稳态误差为 ∞ 。
(参考教材P89)15. 频率响应是系统对 正弦输入 稳态响应,频率特性包括 幅频和相频 两种特性。
16. 如果系统受扰动后偏离了原工作状态,扰动消失后,系统能自动恢复到原来的工作状态,这样的系统是 (渐进)稳定的系统。
信号与系统智慧树知到课后章节答案2023年下宁波大学宁波大学第一章测试1.下列信号的分类方法不正确的是()A:数字信号和离散信号 B:确定信号和随机信号 C:周期信号和非周期信号 D:连续信号与离散信号答案:数字信号和离散信号2.下列表达式中正确的是()A:δ(2t)=δ(2/t) B:δ(2t)=δ(t) C:δ(2t)=2δ(t) D:δ(2t)=δ(t)/2答案:δ(2t)=δ(t)/23.信号平移、反转和尺度变化的最佳作图顺序是()A:先平移,再尺度变换,最后反折 B:先尺度变换,再平移,最后反折 C:先平移,再反折,最后尺度变换 D:先反折,再尺度变换,最后平移答案:先平移,再尺度变换,最后反折4.差分方程是指由未知输出序列项与输入序列项构成的方程。
未知序列项变量最高序号与最低序号的差数,称为差分方程的阶数。
()A:对 B:错答案:对5.系统y(t)=2(t+1)x(t)+cos(t+1)是因果系统。
()A:对 B:错答案:对第二章测试1.线性系统响应满足以下规律()A:若初始状态为零,则零状态响应为零 B:若系统的零状态响应为零,则强迫响应也为零 C:若系统的起始状态为零,则系统的自由响应为零 D:若初始状态为零,则零输入响应为零。
答案:若初始状态为零,则零输入响应为零。
2.卷积δ(t)*f(t)*δ(t)的结果为()A:δ(t) B:f(2t) C:f(t) D:δ(2t)答案:f(t)3.()A: B: C: D:答案:4.若y(t)=x(t)*h(t),则y(-t)=x(-t)*h(-t)。
()A:对 B:错答案:错5.已知,,则的非零值区间为[0,3]。
()A:错 B:对答案:对第三章测试1.某人每月初在银行存入一定数量的款f(k),月息为β,建立求第k个月初存折上款数的差分方程()。
A: B:C:D:答案:2.ε(k)∙ε(k-5)=()A:ε(k-5) B:ε(k) C:ε(k-4) D:(k-4)ε(k-5)答案:ε(k-5)3.某离散时间系统的差分方程a1y(k+1)+a2y(k)+a3y(k-1)=b1f(k+1)+b2f(k),该系统的阶次为()A:4 B:2 C:3 D:1答案:24.离散系统的零状态响应等于激励信号f(k)与单位样值响应h(k)的卷积()A:对 B:错答案:对5.若y(t)=x(t)*h(t),则y(-t)=x(-t)*h(-t)。
信号与系统_北京邮电大学中国大学mooc课后章节答案期末考试题库2023年1.关于信号【图片】描述正确的是()。
参考答案:该信号的基波角频率是1 rad/s。
2.以频谱分割的方式进行频道划分,多路信号混合在一起传输,但每一信号占据着有限的不同频率区间,此区间不被其他信号占用。
这种复用方式称为频分复用。
参考答案:正确3.【图片】上图所示的周期矩形脉冲信号,其直流分量为【图片】。
参考答案:错误4.【图片】的能量是()。
参考答案:55.对于具有矩形幅度特性和线性相位特性的理性低通滤波器,【图片】是其截止频率,其阶跃响应【图片】波形如下图所示。
下面说法中不正确的是()【图片】参考答案:阶跃响应的上升时间为。
6.【图片】的收敛域是全s平面。
参考答案:正确7.因果信号【图片】的拉普拉斯变换为【图片】,则【图片】。
参考答案:正确8.【图片】的z变换为【图片】,收敛域为【图片】。
参考答案:正确9.线性时不变因果系统的单位阶跃响应【图片】与其单位冲激响应【图片】之间关系是【图片】。
参考答案:错误10.周期为T的冲激序列信号【图片】,有关该信号描述不正确的是()。
参考答案:该信号的频谱满足离散性、谐波性和收敛性。
11.在区间【图片】余弦信号【图片】与正弦信号【图片】相互正交。
参考答案:正确12.已知某离散时间线性时不变系统的单位样值响应为【图片】,则当输入信号为【图片】时,系统的零状态响应为【图片】。
参考答案:正确13.某系统的信号流图如下图所示。
则该系统的系统函数可表示为【图片】。
【图片】参考答案:正确14.某连续系统的系统函数为【图片】,该系统可以既是因果的,又是稳定的。
参考答案:正确15.因果系统的系统函数为【图片】,R>0,C>0,则该系统属于( )网络。
参考答案:高通滤波网络16.下图所示反馈系统,已知子系统的系统函数【图片】,关于系统函数及稳定性说法正确的是()。
【图片】参考答案:系统函数为,当时,系统稳定。