TenAsys INtime实时操作系统入门(V3.13)
- 格式:pdf
- 大小:1.01 MB
- 文档页数:29
Tenable Nessus 功能操作手册版本: 1.0日期: 2017-12-27客户名称:目录一、概述 (3)二、环境需求 (3)2.1 硬件需求 (3)2.2 操作系统需求 (3)2.3 防火墙需求 (3)三、软件安装 (4)3.1 安装暴力猜解组件(可选) (4)3.2 安装Nessus组件 (4)3.3 Nessus组件的初始化调试 (4)四、漏洞扫描测试项 (7)4.1 针对Windows/Linux主机进行网络扫描测试 (7)4.2针对Linux主机进行“弱密码”或“暴力猜解”测试 (11)4.3 针对Web网站进行Web App漏洞扫描 (17)4.4 漏洞风险等级自定义测试 (19)4.5 漏洞信息关联性测试 (22)五、扫描任务计划与时间管理测试项 (23)5.1 设置任务计划 (23)六、配置合规审计测试项 (26)一、概述Tenable NessusNessus为业界部署最广泛的漏洞扫描、系统配置与合规性验证产品。
全球已超过2万4千家企业使用,在信息安全和法规遵循产品中,获得众多专业人士认可。
Nessus 可以进行高速扫描、系统配置稽核、资产发现、恶意软件发现、敏感性资料探索、补丁程序管理整合和漏洞分析。
Tenable 的漏洞研究团队准确的依据环境需求,提供不断更新的数据库(plugins),目前已支持超过 90000多个漏洞和系统配置检查,涵盖35000条CVE ID。
Nessus 能扩展并适用于最大型的企业环境,而且部署十分容易。
二、环境需求2.1 硬件需求2.2 操作系统需求CentOS/Redhat操作系统注意项:-Tenable Nessus只占用/opt目录空间,请划分足够的空间至/opt目录或根目录。
-需关闭selinux,编辑/etc/selinux/config ,设置为SELINUX=disabled2.3 防火墙需求需确保Nessus向被检查对象(主机系统及网络设备)有完全访问权限,无防火墙限制。
前言 (4)1.1系统概述 (5)介绍 (5)系统主要组件 (6)1.2 用户登录和注销 (7)登录 (7)注销 (8)超时不活动注销 (9)退出 (9)1.3 用户界面 (10)介绍 (10)界面布局 (10)导航区 (11)导航区中的项目 (11)项目的状态符号 (11)用户定义的导航树 (12)未授权项目导航树 (12)显示区 (12)显示区的布局 (13)显示窗口中的页 (13)显示窗口中的按钮 (14)状态栏 (15)状态栏中的图标 (16)报警窗口 (16)用户界面诊断窗口 (17)电子签名(只限MVE) (17)查看项目数据 (17)修改项目 (18)删除对象/项目 (18)命令项目 (18)打印用户界面 (19)1.4 图形界面 (19)介绍 (19)显示图形 (19)监控设施 (20)1.5 个性化设 (21)介绍 (21)个性化设置的概念 (21)系统设置 (21)用户设置 (21)个性化设置对话框 (21)信息页(Information) (22)报警设置页(Alarm Settings) (22)图形设置页(Graphic Settings) (24)趋势设置页(Trend Settings) (25)显示设置页(Display Settings) (26)应用页(Applications) (27)电子签名设置页(Electronic Signature Settings) (28)注释设置页(Annotation Settings) (28)1.6全局搜索 (28)介绍 (28)全局搜索概述 (29)全局搜索查看器界面 (29)对象列表 (32)实施全局搜索 (32)停止搜索 (33)在搜索结果中选择对象 (33)从搜索结果中删除对象 (33)清除所有搜索结果 (33)向现有搜索结果中手动添加对象 (33)向现有搜索结果中添加新的搜索结果 (34)给分类搜索结果排序 (34)调整搜索结果表中列的顺序 (34)打印搜索结果表 (34)在搜索结果表中命令对象 (34)将搜索结果复制到剪贴板 (34)保存对象列表 (35)打开对象列表 (35)删除对象列表 (35)1.7 全局命令 (36)介绍 (36)全局命令概述 (36)全局命令对话框 (37)命令结果查看器 (38)发送全局命令 (39)使用命令结果查看器 (41)显示命令结果查看器 (41)在命令结果查看器中调整列的顺序 (41)打印命令结果 (41)将命令结果保存到文件中 (41)清除命令结果查看器 (42)1.8 报警和事件管理 (42)介绍 (42)报警和事件管理概述 (42)事件库 (43)默认目的地 (43)ADS/ADX事件信息转发 (44)事件信息的路由、过滤和目的地 (44)事件优先级 (45)通过报警窗口处理报警和事件 (45)打开或关闭报警弹出窗口 (46)事件查看器和事件信息 (46)查看报警事件 (46)在事件查看器中处理报警事件 (48)确认事件信息 (48)放弃事件信息 (48)打印显示的事件信息 (48)为生成事件信息的对象启动Focus视图 (48)启动与事件信息相关的图形 (49)事件信息注释 (49)添加注释 (49)创建注释 (49)查看注释 (49)1.9 时间表 (50)介绍 (50)时间表的概念 (51)日历 (51)时间表 (51)事件 (52)创建时间表 (52)查看及编辑时间表 (58)前言本文基于Metasys 系统扩展架构3.1 版本而写,您的系统可能会因为版本不同而与本文略有差异。
声明Copyright © 2021 普联技术有限公司版权所有,保留所有权利未经普联技术有限公司明确书面许可,任何单位或个人不得擅自仿制、复制、誊抄或转译本手册部分或全部内容,且不得以营利为目的进行任何方式(电子、影印、录制等)的传播。
为普联技术有限公司注册商标。
本手册提及的所有商标,由各自所有人拥有。
本手册所提到的产品规格和资讯仅供参考,如有内容更新,恕不另行通知。
除非有特殊约定,本手册仅作为使用指导,所作陈述均不构成任何形式的担保。
目录第1章前言 (1)1.1 目标读者 (1)1.2 本书约定 (1)1.3 适用机型 (1)第2章基础联网设置 (3)2.1 企业路由器基本设置指南 (3)2.1.1 应用介绍 (3)2.1.2 需求介绍 (3)2.1.3 设置方法 (3)2.1.4 注意事项 (7)2.2 企业路由器IPv6上网配置指导 (8)2.2.1 应用介绍 (8)2.2.2 需求介绍 (8)2.2.3 设置方法 (8)2.2.4 疑问解答 (15)第3章设备管理 (17)3.1 如何在外网远程管理(控制)路由器? (17)3.1.1 应用介绍 (17)3.1.2 需求介绍 (17)3.1.3 设置方法 (17)3.1.4 注意事项 (20)3.1.5 疑问解答 (21)3.2 如何设置自动重启? (22)3.2.1 应用介绍 (22)3.2.2 需求介绍 (22)3.2.3 设置方法 (22)3.2.4 注意事项 (23)第4章负载均衡 (24)4.1 多WAN口路由器负载均衡的设置指南 (24)4.1.1 应用介绍 (24)4.1.2 需求介绍 (24)4.1.3 工作原理 (24)4.1.4 设置方法 (25)第5章路由转发模块 (27)5.1 策略路由设置指南 (27)5.1.1 应用介绍 (27)5.1.2 需求介绍 (27)5.1.3 设置方法 (28)5.1.4 疑问解答 (31)5.2 ISP选路设置指南 (33)5.2.1 应用介绍 (33)5.2.2 需求介绍 (33)5.2.3 设置方法 (34)5.3 静态路由设置指南 (36)5.3.1 应用介绍 (36)5.3.2 需求介绍 (36)5.3.3 设置方法 (37)5.4 线路备份设置指南 (38)5.4.1 应用介绍 (38)5.4.2 需求介绍 (38)5.4.3 设置方法 (38)5.4.4 注意事项 (40)5.5 虚拟服务器设置指南 (41)5.5.1 应用介绍 (41)5.5.2 需求介绍 (41)5.5.3 设置方法 (42)5.5.4 疑问解答 (43)5.6 NAT-DMZ功能设置指南 (44)5.6.1 应用介绍 (44)5.6.2 需求介绍 (44)5.6.3 设置方法 (45)第6章AP和易展管理 (47)6.1 AP管理设置指南 (47)6.1.1 应用介绍 (47)6.1.2 需求介绍 (47)6.1.3 设置方法 (47)6.2 易展AP设置指南 (53)6.2.1 应用介绍 (53)6.2.2 需求介绍 (53)6.2.3 设置方法 (54)6.2.4 注意事项 (58)第7章行为管控 (59)7.1 连接数限制设置指南 (59)7.1.1 应用介绍 (59)7.1.2 需求介绍 (59)7.1.3 设置方法 (59)7.1.4 疑问解答 (60)7.2 访问控制设置指南 (61)7.2.1 应用介绍 (61)7.2.2 需求介绍 (61)7.2.3 设置方法 (61)7.2.4 疑问解答 (67)7.3 应用限制设置指南 (68)7.3.1 应用介绍 (68)7.3.2 需求介绍 (68)7.3.3 设置方法 (68)7.4 网址过滤设置指南 (71)7.4.1 应用介绍 (71)7.4.2 需求介绍 (71)7.4.3 设置方法 (71)7.4.4 疑问解答 (75)7.5 网页安全设置指南 (76)7.5.1 应用介绍 (76)7.5.2 需求介绍 (76)7.5.3 设置方法 (76)第8章安全防护 (78)8.1 ARP防护设置指南 (78)8.1.1 应用介绍 (78)8.1.2 需求介绍 (78)8.1.3 设置方法 (78)8.1.4 疑问解答 (84)8.2 MAC地址过滤设置指南 (86)8.2.1 应用介绍 (86)8.2.2 需求介绍 (86)8.2.3 设置方法 (86)第9章VPN模块 (88)9.1 IPSec VPN设置指南 (88)9.1.1 应用介绍 (88)9.1.2 需求介绍 (88)9.1.3 设置方法 (89)9.2 L2TP VPN设置指南 (96)9.2.1 应用介绍 (96)9.2.2 需求介绍 (96)9.2.3 设置方法 (97)9.3 PPTP VPN设置指南 (105)9.3.1 应用介绍 (105)9.3.2 需求介绍 (105)9.3.3 设置方法 (106)9.4 L2TP VPN代理上网设置指南 (115)9.4.1 应用介绍 (115)9.4.2 需求介绍 (115)9.4.3 设置方法 (115)9.5 PPTP VPN代理上网设置指南 (120)9.5.1 应用介绍 (120)9.5.2 需求介绍 (120)9.5.3 设置方法 (120)第10章认证管理 (125)10.1 一键上网设置指南 (125)10.1.1 应用介绍 (125)10.1.2 需求介绍 (125)10.1.3 设置方法 (126)10.2 短信认证设置指南 (130)10.2.1 应用介绍 (130)10.2.2 需求介绍 (130)10.2.3 设置方法 (131)10.3 Portal认证设置指南—使用内置WEB服务器和内置认证服务器 (136)10.3.1 应用介绍 (136)10.3.2 需求介绍 (136)10.3.3 设置方法 (137)10.4 Portal认证设置指南—使用内置WEB服务器和外部认证服务器 (141)10.4.1 应用介绍 (141)10.4.2 需求介绍 (141)10.4.3 设置方法 (142)10.5 Portal认证设置指南—使用外置WEB服务器和内置认证服务器 (146)10.5.1 应用介绍 (146)10.5.2 需求介绍 (146)10.5.3 设置方法 (147)10.6 Portal认证设置指南—使用外置WEB服务器和外置认证服务器 (150)10.6.1 应用介绍 (150)10.6.2 需求介绍 (150)10.6.3 设置方法 (151)10.7 免认证策略的使用方法 (154)10.7.1 应用介绍 (154)10.7.2 需求介绍 (154)10.7.3 设置方法 (155)10.8 Portal认证中,外部WEB服务器建立规范 (158)10.8.1 应用介绍 (158)10.8.2 流程规范 (159)第11章工业级特性 (163)11.1 如何使用工业级路由器? (163)11.1.1 产品介绍 (163)11.1.2 需求介绍 (163)11.1.3 设置方法 (164)第12章其它功能 (168)12.1 地址组的设置与管理 (168)12.1.1 应用介绍 (168)12.1.2 需求介绍 (168)12.1.3 设置方法 (168)12.1.4 疑问解答 (170)12.2 带宽控制设置指南 (172)12.2.1 应用介绍 (172)12.2.2 需求介绍 (172)12.2.3 设置方法 (172)12.2.4 疑问解答 (175)12.3 PPPOE服务器应用设置指南 (177)12.3.1 应用介绍 (177)12.3.2 需求介绍 (177)12.3.3 设置方法 (178)12.3.4 疑问解答 (181)12.4 网络唤醒功能使用指南 (183)12.4.1 应用介绍 (183)12.4.2 需求介绍 (183)12.4.3 设置方法 (183)12.5 诊断工具使用指南 (186)12.5.1 应用介绍 (186)12.5.2 需求介绍 (186)12.5.3 设置方法 (187)第1章前言本手册旨在帮助您正确使用R系列企业级路由器。

本指南中的內容目錄視訊會議簡介最佳實作 (4)音訊設定 (5)使用您自己的認證登入 (6)將 Room Kit Mini 當做 USB 攝影機 (7)視訊通話自聯絡人名單撥號 (9)通話前編輯聯絡人 (10)使用姓名、號碼或位址撥話 (11)接聽電話—非通話時 (12)在另一個通話中接聽電話 (13)自通話中中斷連線 (14)保留通話與繼續接聽保留中的通話 (15)轉接進行中的通話 (16)啟用「請勿打擾」模式 (17)自動轉接所有通話 (18)於通話中檢視鍵台 (19)將其他出席者加入現有通話 (20)中斷出席者與會議的連線 (21)允許出席者加入會議 (22)在會議中固定發言人 (23)使用音樂模式 (24)舉手參加會議 (25)尋找最近通話詳細資訊 (26)智慧型近接感測Cisco Proximity 超音波訊號 (28)內容共用通話中共用內容 (30)在非通話時共用內容 (31)於通話中變更簡報版面配置....................................................32已排程的會議加入已排程會議 (34)加入 Webex 會議 (35)聯絡人最愛、通話記錄及目錄 (37)於通話中將某人加入最愛 (38)未通話時將某人加入最愛 (39)編輯現有的最愛 (40)攝影機檢視攝影機設定 (42)新增預設攝影機位置 (43)編輯預設攝影機位置 (44)開啟或關閉攝影機 (45)追蹤發言者 (46)簡報講者追蹤 (47)控制自己的相機 (48)遠端攝影機控制 (49)管理自拍 (50)調整自拍畫中畫大小 (51)移動自拍 PiP (52)設定存取設定和監管資訊 (54)目錄中所有項目皆為有效超連結,按一下即可進入相對應的文章。
如要在章節之間切換,可按一下側邊列中對應的圖示。
請注意:本使用者指南提及的部分功能為選用功能,有可能不適用於您的裝置。
本指南會介紹如何在註冊至內部部署服務時,將 Touch 10或 Room Navigator 配合以下產品一同使用:Room 系列:• Room Kit• Room Kit Mini• Room Kit Plus 和 Codec Plus• Room Kit Pro 和 Codec Pro• Room 55 和 55 Dual• Room 70 和 70 G2• Room Panorama 和全景70視訊會議簡介使用攝影機預設功能透過 Cisco Webex 系統,您可以建立預先定義的縮放及攝影機指向(平移及傾斜)。
目录第一章、概述-----------------------------------------------------------------------------------------------------第二章、界面功能及操作说明--------------------------------------------------------------------------------一、系统设置-----------------------------------------------------------------------------------------------1· 1 系统参数--------------------------------------------------------------------------------------1· 2 收银参数--------------------------------------------------------------------------------------1· 3 其他参数--------------------------------------------------------------------------------------1· 4 硬件参数--------------------------------------------------------------------------------------1· 5 界面设计--------------------------------------------------------------------------------------二、基础数据-----------------------------------------------------------------------------------------------2· 1 部门定义--------------------------------------------------------------------------------------2· 2 手牌设置--------------------------------------------------------------------------------------2· 3 房间设置--------------------------------------------------------------------------------------2· 4 付款方式--------------------------------------------------------------------------------------2· 5 消费项目--------------------------------------------------------------------------------------2· 6 员工信息----2·7 会员类型--------------------------------------------------------------------------------------2·8 折扣方案--------------------------------------------------------------------------------------2·9 协议单位--------------------------------------------------------------------------------------2·10 计费方案--------------------------------------------------------------------------------------2·11 考勤班次--------------------------------------------------------------------------------------2·12 编码规则--------------------------------------------------------------------------------------2·13 打印机设置-----------------------------------------------------------------------------------2·14 关闭--------------------------------------------------------------------------------------------三、房态管理-----------------------------------------------------------------------------------------------3· 1 开房--------------------------------------------------------------------------------------------3· 2 调派技师--------------------------------------------------------------------------------------3· 3 消费入账--------------------------------------------------------------------------------------3· 4 合并账单--------------------------------------------------------------------------------------3· 5 更换房间(整间更换)--------------------------------------------------------------------3· 6 客人退房----3·7 房间销帐--------------------------------------------------------------------------------------3·8 房间转帐--------------------------------------------------------------------------------------3·9 拆分账单--------------------------------------------------------------------------------------3·10 技师报钟--------------------------------------------------------------------------------------3·11 技师下钟--------------------------------------------------------------------------------------3·12 更换技师--------------------------------------------------------------------------------------3·13 更换项目--------------------------------------------------------------------------------------3·14 更换房间(单个客人更换)--------------------------------------------------------------3·15 客人加钟--------------------------------------------------------------------------------------3·16 客人退钟--------------------------------------------------------------------------------------3·17 撤销技师下钟-------------------------------------------------------------------------------- 3·18 技师上钟查询-------------------------------------------------------------------------------- 3·19 房间客人等待查询-------------------------------------------------------------------------- 3·20 技师轮过处理--------------------------------------------------------------------------------四、房间结账-----------------------------------------------------------------------------------------------五、钟房管理-----------------------------------------------------------------------------------------------六、预定管理-----------------------------------------------------------------------------------------------七、会员管理------------------------------------------------------------------------------------------------7· 1 会员发卡---------------------------------------------------------------------------------------7· 2 会员充值---------------------------------------------------------------------------------------7· 3 会员换卡---------------------------------------------------------------------------------------7· 4 会员卡转账------------------------------------------------------------------------------------7· 5 会员卡取现------------------------------------------------------------------------------------7· 6 会员卡修改密码------------------------------------------------------------------------------ 7·7 会员卡状态管理------------------------------------------------------------------------------ 7·8 会员卡积分冲减------------------------------------------------------------------------------ 7·9 卡积分兑换------------------------------------------------------------------------------------7·10 撤销卡密码------------------------------------------------------------------------------------7·11 冲减卡余额------------------------------------------------------------------------------------7·12 客户管理---------------------------------------------------------------------------------------7·13 会员卡查询------------------------------------------------------------------------------------八、库存管理-------------------------------------------------------------------------------------------------九、退出系统-------------------------------------------------------------------------------------------------第三章、软件功能及操作说明----------------------------------------------------------------------------------一、系统管理------------------------------------------------------------------------------------------------1· 1 系统参数设置---------------------------------------------------------------------------------- 1· 2 数据备份----------------------------------------------------------------------------------------1· 3 数据还原----------------------------------------------------------------------------------------1· 4 数据初始化-------------------------------------------------------------------------------------1· 5 用户权限管理---------------------------------------------------------------------------------- 1· 6 修改操作密码---------------------------------------------------------------------------------- 1·7 更换操作员-------------------------------------------------------------------------------------1·8 挂账还款----------------------------------------------------------------------------------------1·9 收银交班----------------------------------------------------------------------------------------1·10 系统操作日志---------------------------------------------------------------------------------- 1·11 退出系统----------------------------------------------------------------------------------------二、考勤管理------------------------------------------------------------------------------------------------2· 1 考勤规则----------------------------------------------------------------------------------------2· 2 值班定义----------------------------------------------------------------------------------------2· 3 员工排班----------------------------------------------------------------------------------------2· 4 员工考勤刷卡---------------------------------------------------------------------------------- 2· 5 刷卡记录查询---------------------------------------------------------------------------------- 2· 6 员工请假管理---------------------------------------------------------------------------------- 2·7 员工奖罚登记---------------------------------------------------------------------------------- 2·8 考勤月报表-------------------------------------------------------------------------------------2·9 技师排钟模式----------------------------------------------------------------------------------三、票券管理------------------------------------------------------------------------------------------------3· 1 票券类型设置---------------------------------------------------------------------------------- 3· 2 票券发放管理---------------------------------------------------------------------------------- 3· 3 票券状态查询----------------------------------------------------------------------------------四、营业查询-------------------------------------------------------------------------------------------------4· 1 开单记录查询-----------------------------------------------------------------------------------4· 2 消费明细查询-----------------------------------------------------------------------------------4· 3 历史账单查询-----------------------------------------------------------------------------------五、统计报表-------------------------------------------------------------------------------------------------5· 1 营业日报表--------------------------------------------------------------------------------------5· 2 营业月汇总表-----------------------------------------------------------------------------------5· 3 营业统计报表-----------------------------------------------------------------------------------5· 4 营业账单明细表-------------------------------------------------------------------------------- 5· 5 项目销售汇总表-------------------------------------------------------------------------------- 5· 6 项目推销汇总表-------------------------------------------------------------------------------- 5·7 项目推销明细表-------------------------------------------------------------------------------- 5·8 项目销售业绩表-------------------------------------------------------------------------------- 5·9 员工提成日报表-------------------------------------------------------------------------------- 5·10 技师情况日报表-------------------------------------------------------------------------------- 5·11 技师提成明细表-------------------------------------------------------------------------------- 5·12 技师上钟汇总表-------------------------------------------------------------------------------- 5·13 技师上钟明细表-------------------------------------------------------------------------------- 5·14 技师业绩汇总表-------------------------------------------------------------------------------- 5·15 技师业绩月报表-------------------------------------------------------------------------------- 5·16 技师收入统计表-------------------------------------------------------------------------------- 5·17 数据趋势分析图--------------------------------------------------------------------------------六、帮助-------------------------------------------------------------------------------------------------------第一章概述第二章界面功能及操作说明一、系统设置1·1 系统参数1.1.1 店名称就是该使用单位的全名称。
PECS动力环境集中监控系统V2.0软件使用维护手册2010年7月中达电通股份有限公司版权所有,保留一切权利。
在没有得到本公司书面许可时,任何单位和个人不得擅自摘抄、复制本书(软件等)的一部分或全部,不得以任何形式(包括资料和出版物)进行传播。
版权所有,侵权必究Copyright by Delta Greentech (China) Co.,Ltd.All rights reserved.No part of this document may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic mechanical, photocopying, recording, etc., without express written permission from Delta Greentech (China) Co.,Ltd.目录前言 (4)第一章概述 (5)1.1系统平台配置需求 (5)1.2系统主要程序及数据库 (5)1.3系统部属流程 (5)1.4数据库导入说明 (5)第二章ISMARTCONFIG数据配置系统功能及操作说明 (9)2.1数据源配置 (9)2.2读取配置信息 (10)2.3前置系统配置 (11)2.4中心系统配置 (21)2.5用户系统配置 (40)2.6系统工具 (43)2.6.1 批量替换器 (43)2.6.2 设备监控采集点模板库管理 (44)2.6.3 告警标准库管理 (46)2.6.4 设备厂商信息管理 (47)2.6.5 监控厂商信息管理 (48)2.6.6 局站及设备管理 (48)2.6.7 用户信息管理 (50)2.6.8 客户端信息管理 (51)2.6.9接口数据库管理 (51)第三章ISMARTACESS数据管理系统功能与操作说明 (54)3.1数据源配置 (54)3.2加载运行数据 (54)3.3采集设置 (55)3.4用户设置 (55)3.5接口设置 (56)3.6数据监测 (57)3.7数据采集 (57)3.8接口信息 (58)第四章ISMARTBROWSER客户端浏览程序功能与操作说明 (59)4.1通讯配置 (59)4.2界面说明 (61)4.3声音设置 (62)4.4告警级别与颜色 (62)4.5数据导出 (62)4.6用户管理 (63)4.7维护管理 (64)4.8报表管理 (65)4.8.1 实时综合报表 (65)4.8.2 历史告警报表 (66)4.8.3 历史曲线统计表 (68)4.8.4 用户登录记录表 (69)4.8.5 用户操作记录表 (70)4.9视图工具 (70)4.10帮助 (71)第五章ISMARTSMS短信报警功能与操作说明 (72)5.1概述 (72)5.2设备规格 (72)5.3操作说明 (72)5.3.1 系统管理 (72)5.3.2 用户管理 (73)5.3.3 设备管理 (74)5.3.4 设备测试 (75)5.3.5 短信信息 (76)5.3.6 告警信息 (76)5.3.7 服务器通信 (77)5.3.8 查询 (77)5.3.9 短信格式 (78)第六章ISMARTVOICE语音播报功能与操作说明 (79)6.1概述 (79)6.2设备规格及说明 (79)6.3语音设备安装说明 (80)6.4操作说明 (81)6.4.1 系统管理 (81)6.4.2 用户管理 (82)6.4.3 设备管理 (82)6.4.4 设备测试 (83)6.4.5 语音信息 (83)6.4.6 告警信息 (84)6.4.7 服务器通信 (84)6.4.8 查询 (84)第七章ISMARTCPORT C接口服务功能与操作说明 (86)7.1概述 (86)7.2参考规范 (86)7.3系统数据结构 (87)7.4系统功能模块 (87)7.5系统操作说明 (88)7.5.1 运行前准备 (88)7.5.2 系统 (88)7.5.3 帮助 (94)前言PECS(Power-Supply & Environment Centralize Supervision System)是中达电通股份有限公司新一代的全新智能监控系统管理平台,系统从客户的需求出发,自我升级,不断创新,运用最新计算机网络及数据库管理技术开发,采用B/S和C/S架构,提供完善的系统功能、客户端管理及WEB服务。

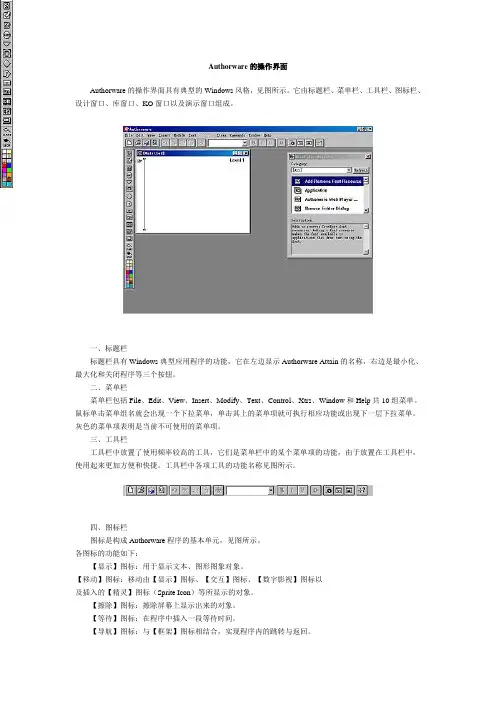
Authorware的操作界面Authorware的操作界面具有典型的Windows风格,见图所示。
它由标题栏、菜单栏、工具栏、图标栏、设计窗口、库窗口、KO窗口以及演示窗口组成。
一、标题栏标题栏具有Windows典型应用程序的功能,它在左边显示Authorware Attain的名称,右边是最小化、最大化和关闭程序等三个按钮。
二、菜单栏菜单栏包括File、Edit、View、Insert、Modify、Text、Control、Xtrs、Window和Help共10组菜单。
鼠标单击菜单组名就会出现一个下拉菜单,单击其上的菜单项就可执行相应功能或出现下一层下拉菜单。
灰色的菜单项表明是当前不可使用的菜单项。
三、工具栏工具栏中放置了使用频率较高的工具,它们是菜单栏中的某个菜单项的功能,由于放置在工具栏中,使用起来更加方便和快捷。
工具栏中各项工具的功能名称见图所示。
四、图标栏图标是构成Authorware程序的基本单元,见图所示。
各图标的功能如下:【显示】图标:用于显示文本、图形图象对象。
【移动】图标:移动由【显示】图标、【交互】图标、【数字影视】图标以及插入的【精灵】图标(Sprite Icon)等所显示的对象。
【擦除】图标:擦除屏幕上显示出来的对象。
【等待】图标:在程序中插入一段等待时间。
【导航】图标:与【框架】图标相结合,实现程序内的跳转与返回。
【框架】图标:提供在附属于它的页面间跳转的控制功能,并与【导航】图标相结合,实现程序内的跳转控制机制。
【决策】图标:提供逻辑判断和循环控制机制,实现对附着于它的各分支程序流程走向及其循环的控制功能。
【交互】图标:用于控制各种形式的交互,它与附着于它的图标共同构成交互程序结构。
【计算】图标:执行各种运算,这些运算可引用系统函数、系统变量、外部函数,也可引用自定义变量。
【集组】图标:可将一组相邻的图标置于【集组】图标中,实现程序设计的结构化。
【数字影视】图标:插放动画和视频。
虚拟化技术在嵌入式系统中的应用李芳社【摘要】基于嵌入式系统对虚拟化环境的特殊要求,探讨如何设计虚拟机(VM).针对工业实时控制,介绍了与第三方产品结合,把Intel虚拟化技术的好处拓展到应用中去.用虚拟化整合系统可以保证一定的实时性能;无需硬件冗余;进行软件移植而不简化应用.通过软件环境并行,虚拟化也允许原有的应用与新应用并存.它为多线程的应用在多核处理器上运行提供了途径.【期刊名称】《现代电子技术》【年(卷),期】2008(031)016【总页数】4页(P43-45,50)【关键词】虚拟化;虚拟机监控器;实时操作系统;嵌入式系统;工业控制【作者】李芳社【作者单位】北京建筑工程学院,北京,100096【正文语种】中文【中图分类】TP391.91 引言虚拟化技术已经应用于桌面、移动和IT服务器领域,实际上,在嵌入式系统中,也可以实现由虚拟化硬件环境而带来的一些好处,例如,多个操作系统(OS)可共享硬件平台的公共资源。
这样就可以降低成本(既可降低资金成本也可以降低运营成本),提高系统的性能,增加系统的功能,或改善系统可靠性和安全性。
本文着重探讨虚拟化技术在嵌入式系统中的几个使用模型。
不考虑虚拟化的工作机制,使用模型的共同特点是,总是需要添加一个软件层,调度共享硬件平台的操作系统,管理分配给每一个操作系统的资源,当操作系统之间上下文切换时,保存/恢复状态。
在这种方法中,每个操作系统在一个“虚拟机”(VM)上而不是在一个物理机上运行。
该添加的软件层,虚拟机监控器(VMM),以类似于操作系统管理应用运行的方法管理操作系统的运行。
尽管所有使用模型都有VMM,但是针对不同的应用要求可以对VMM的架构进行裁剪,以便为特定的应用需求做出不同的设计。
对于不同的应用不仅需要裁剪VMM,而且也必须裁剪在VM内运行的操作系统以满足这些应用的要求。
因此,一个通用操作系统(GPOS)如Linux,微软的Windows或Windows Server通常运行在桌面或IT服务器环境中,而一个不同种类的操作系统----实时操作系统(RTOS)用于嵌入式系统和通信系统中。
用户手册版本:2.1.1日期:2021.08适用软件版本:万傲瑞达V6000 2.1.1版本及以上重要申明首先感谢您选择本公司产品。
为更好的使用软件中的各项功能,在使用前请您仔细阅读本产品的说明书。
非经本公司书面同意,任何单位和个人不得擅自摘抄、复制本手册内容的部分或全部,并不得以任何形式传播。
本手册中描述的产品中,可能包含本公司及其可能存在的许可人享有版权的软件。
除非获得相关权利人的许可,否则任何人不得以任何形式对前述软件进行复制、分发、修改、摘录、反编译、反汇编、解密、反向工程、出租、转让、分许可以及其他侵犯软件版权的行为,但是适用法禁止此类限制的除外。
由于产品不断更新,本公司不承诺实际产品与该数据一致,同时也不承担由于实际技术参数与本数据不符而导致的任何争议,任何改动恕不提前通知。
目录1概述 (15)1.1人事系统简介 (15)1.2门禁系统简介 (15)1.3视频(VMS)系统简介 (15)1.4考勤系统简介 (15)1.5离线消费系统简介 (16)1.6在线消费系统简介 (16)1.7梯控系统简介 (16)1.8访客系统简介 (16)1.9停车系统简介 (16)1.10巡更系统简介 (16)1.11视频系统简介 (16)1.12人证系统简介 (16)1.13通道系统简介 (17)1.14信息屏系统简介 (17)1.15防疫系统简介 (17)1.16系统管理简介 (17)2运行和使用 (18)2.1安装指南 (18)2.1.1服务器建议配置要求 (18)2.1.2安装流程 (18)2.2用户登录/退出 (30)2.2.1登录系统 (30)2.2.2退出系统 (31)2.3员工自助登录 (31)2.4系统主页面 (32)2.5修改密码 (35)2.6图标菜单切换 (36)3人事模块 (38)3.1系统激活....................................................................................................................错误!未定义书签。
1、定义:虚拟现实技术就是采用以计算机技术为核心结合光电传感技术生成逼真的视、听、触一体化的特定范围内虚拟的环境(如飞机驾驶舱、分子结构世界,高危环境)。
若使用特定装备(动作采集自由度空间定位、力反馈输入、数字头盔、立体显示环境等),就可以自然地与虚拟世界中的客体进行实时逼真交互,从而产生亲临现场的感受和体验。
2、特点:1、沉浸感2、交互性3、想象性3、应用范围:电子商务、高危环境应急系统、工业仿真、数字城市规划、教育学习、生物医药、休闲娱乐、虚拟演播室…4、分类:1、按功能及实现方式分类:桌面式VR系统:利用个人电脑或者图形工作站,采用立体图形、自然交互等技术,产生三维立体空间的交互场景,利用计算机的屏幕作为观察虚拟世界的一个窗口,通过各种设备实现与虚拟世界的交互。
(空间位置追踪定位器、数据手套、三维空间鼠标)主要特点:1、对硬件要求低2、缺少完全沉浸感3、应用普遍沉浸式VR系统:提供完全沉浸的体验,使用户有一种完全置身于虚拟世界的感觉。
它通常采用头盔显示器、洞穴式立体显示等设备,把参与者的视觉、听觉和其他手控输入设备、声音等使得参与者产生一种完全投入并沉浸于其中的感觉,是一种比较理想的VR系统。
沉浸式VR系统的特点:1、高度的沉浸感2、高度实时性分布式VR系统:暂时不涉及…2、建模技术分类:(几何建模技术、物理建模技术、行为建模)几何模型式:主要特点:视角不受限制VR工具软件建模:vrml、Java3D、openGL购买模型库建模软件3Dmax、AutoCAD、Creator、Pro/E影像式:主要特点:对计算机要求低、与场景复杂程度无关全景技术(QuickTimeVR)5、系统组成:软件硬件结合构成一、软件:1、立体模型VR类:三维建模软件(3dmax类)、立体扫描仪与virtools类平台结合2、QuickTimeVR类:桌面式VR的一种,基于静态图像处理的,虽然是初级的VR技术,但是它的特色和优势使得VR技术的应用普及有了广阔的前景。
基于INtime的雷达实时操控显示终端设计作者:漆先虎, 张军, 张博君来源:《现代电子技术》2011年第19期摘要:为了兼顾雷达操控显示终端的实时性能和强劲的图形显示能力,提出了基于INtime实时扩展的雷达实时操控显示终端设计方案。
通过INtime实时进程完成雷达实时控制、数据处理等实时任务,通过Windows进程完成雷达数据等的快速显示,利用INtime的共享内存和信号量机制实现两进程之间的通信。
经过测试仿真及与雷达实装的现场运行,获得了良好的效果,验证了该方案的适用性。
关键词:操控终端; INtime;实时;显示中图分类号:TN957.7-34文献标识码:A文章编号:1004-373X(2011)19-0021-03Design of Radar Real-time Control Display Terminal Based on INtimeQI Xian-hu, ZHANG Jun, ZHANG Bo-jun(Xi’an Electronic Engineering Research Institute, Xi’an 710100, China)Abstract: In order to realize the combination of graphics display capability and real-time performance of radar control display terminal,a design scheme of radar real-time control display terminal based on INtime is introduced. The design performed the real-time task of radar real-time control and data processing by INtime real-time process, and completed fast display of radar data by Windows. The communication between INtime and Windows could be achieved by using INtime shared memory and semaphore mechanism. The design is proved to be valid and has a nice result after testing through simulation and running on radar.Keywords: control terminal; INtime; real-time; display0 引言雷达操控显示终端作为雷达系统的重要组成部分,用于雷达空情目标显示、数字原始视频显示、雷达控制、系统监测等,随着计算机性能的提高和多功能需求的日益增强,将雷达的实时控制、数据处理等实时应用集成在雷达的操控显示终端中已日益成为趋势,用户的界面审美需求也对终端的图形加速、多媒体以及三维场景的显示性能提出更高的要求。
第 4 章Nagios入门上一页下一页第 4 章入门4.1. 给新手的建议祝贺你选择了Nagios!Nagios是一个非常强大且柔性化的软件,但可能需要不少心血来学习如何配置使之符合你所需,一旦掌握了它如何工作并怎样来工作时,你会觉得再也离不开它! :-) 对于初次使用Nagios的新手这有几个建议需要遵从:∙放松点-这会花些时间。
不要指望它事情可以在转瞬间就搞掟,没有那么容易。
设置好Nagios是一个费点事的工作,部分是由于对Nagios设置并不清楚,而还可能是由于并不清楚如何来监控现有网络(或者说如何监控会更好)。
∙使用快速上手指南。
本帮助给出了快速安装指南是给那些新手尽快地将Nagios安装到位并运行起来而写就的。
在不到二十分钟之内可以安装并监控本地的系统,一旦完成了,就可以继续学习配置Nagios了。
∙阅读文档。
如果掌握Nagios运行机制,可以高效地配置它并且使之无所不能。
确信已经阅读了这些文档(是"配置Nagios"和"基本操作"两章)。
在更好地理解基础性配置之前可以对那些高级内容暂时不管。
∙获得他人协助。
如果已经阅读文档并检测了样本配置文件但仍然有问题,写一个EMail给nagios-users邮件列表并写清楚问题。
由于在这个项目上我有不少事情要做,直接给我的邮件我可能无法回复,所以最好是求助于邮件列表,如果有较好的背景并且可以将问题描述清楚,或许有人可以指出如何正确来做。
更多地信息请在这个链接/support/下寻找。
4.2. 旧Nagios升级到当前版本目录∙第 4.2.1 节“从旧的3.x版本升级到当前版本”∙第 4.2.2 节“从2.x升级到3.x”∙第 4.2.3 节“从RPM包安装状态升级”4.2.1. 从旧的3.x版本升级到当前版本如果是使用3.x的旧版,肯定是要尽快升级到当前版本。
新版本修正了许多错误,下面假定已经根据快速安装指南的操作步骤从源代码包开始安装好Nagios,下面可以安装更新的版本。
The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.6.11 (11/2017)Hardware version: MASCHINE MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 203B & 201B, Nanshan E-Commerce Base Of Innovative ServicesShi Yun Road, Shekou, Nanshan, Shenzhen China© NATIVE INSTRUMENTS GmbH, 2017. All rights reserved.Table of Contents1Welcome to MASCHINE (23)1.1MASCHINE Documentation (24)1.2Document Conventions (25)1.3New Features in MASCHINE 2.6.11 (27)2Basic Concepts (29)2.1Important Names and Concepts (29)2.2Adjusting the MASCHINE User Interface (32)2.2.1Adjusting the Size of the Interface (32)2.2.2Switching between Ideas View and Arranger View (33)2.2.3Showing/Hiding the Browser (34)2.2.4Minimizing the Mixer (34)2.2.5Showing/Hiding the Control Lane (35)2.3Common Operations (36)2.3.1Using the 4-Directional Push Encoder (36)2.3.2Pinning a Mode on the Controller (37)2.3.3Pinning a Mode on the Controller (38)2.3.4Undo/Redo (39)2.3.5List Overlay for Selectors (41)2.3.6Zoom and Scroll Overlays (42)2.3.7Focusing on a Group or a Sound (42)2.3.8Switching Between the Master, Group, and Sound Level (47)2.3.9Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.482.3.9.1Extended Navigate Mode on Your Controller (53)2.3.10Using Two or More Hardware Controllers (56)2.3.11Touch Auto-Write Option (58)2.4Native Kontrol Standard (60)2.5Stand-Alone and Plug-in Mode (62)2.5.1Differences between Stand-Alone and Plug-in Mode (62)2.5.2Switching Instances (63)2.5.3Controlling Various Instances with Different Controllers (64)2.6Preferences (65)2.6.1Preferences – General Page (66)2.6.2Preferences – Audio Page (70)2.6.3Preferences – MIDI Page (74)2.6.4Preferences – Default Page (77)2.6.5Preferences – Library Page (81)2.6.6Preferences – Plug-ins Page (89)2.6.7Preferences – Hardware Page (94)2.6.8Preferences – Colors Page (98)2.7Integrating MASCHINE into a MIDI Setup (100)2.7.1Connecting External MIDI Equipment (100)2.7.2Sync to External MIDI Clock (101)2.7.3Send MIDI Clock (102)2.8Syncing MASCHINE using Ableton Link (103)2.8.1Connecting to a Network (103)2.8.2Joining and Leaving a Link Session (103)2.9Using a Pedal with the MASCHINE Controller (105)2.10File Management on the MASCHINE Controller (105)3Browser (107)3.1Browser Basics (107)3.1.1The MASCHINE Library (107)3.1.2Browsing the Library vs. Browsing Your Hard Disks (108)3.2Searching and Loading Files from the Library (109)3.2.1Overview of the LIBRARY Pane (109)3.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (114)3.2.2.1Browsing by Product Category Using MASCHINE MK3 (118)3.2.2.2Browsing by Product Vendor Using MASCHINE MK3 (119)3.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (119)3.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (124)3.2.4Selecting a File Type (125)3.2.5Choosing Between Factory and User Content (126)3.2.6Selecting Type and Mode Tags (127)3.2.7List and Tag Overlays in the Browser (133)3.2.8Performing a Text Search (135)3.2.9Loading a File from the Result List (135)3.3Additional Browsing Tools (140)3.3.1Loading the Selected Files Automatically (140)3.3.2Auditioning Instrument Presets (142)3.3.3Auditioning Samples (143)3.3.4Loading Groups with Patterns (144)3.3.5Loading Groups with Routing (145)3.3.6Displaying File Information (145)3.4Using Favorites in the Browser (146)3.5Editing the Files’ Tags and Properties (152)3.5.1Attribute Editor Basics (152)3.5.2The BANK Page (154)3.5.3The TYPES and MODES Pages (155)3.5.4The PROPERTIES Page (157)3.6Loading and Importing Files from Your File System (158)3.6.1Overview of the FILES Pane (158)3.6.2Using Favorites (160)3.6.3Using the Location Bar (161)3.6.4Navigating to Recent Locations (162)3.6.5Using the Result List (163)3.6.6Importing Files to the MASCHINE Library (166)3.7Locating Missing Samples (168)3.8Using Quick Browse (170)4Managing Sounds, Groups, and Your Project (175)4.1Overview of the Sounds, Groups, and Master (175)4.1.1The Sound, Group, and Master Channels (176)4.1.2Similarities and Differences in Handling Sounds and Groups (177)4.1.3Selecting Multiple Sounds or Groups (178)4.2Managing Sounds (183)4.2.1Loading Sounds (185)4.2.2Pre-listening to Sounds (186)4.2.3Renaming Sound Slots (187)4.2.4Changing the Sound’s Color (187)4.2.5Saving Sounds (189)4.2.6Copying and Pasting Sounds (191)4.2.7Moving Sounds (194)4.2.8Resetting Sound Slots (196)4.3Managing Groups (197)4.3.1Creating Groups (198)4.3.2Loading Groups (200)4.3.3Renaming Groups (201)4.3.4Changing the Group’s Color (201)4.3.5Saving Groups (203)4.3.6Copying and Pasting Groups (205)4.3.7Reordering Groups (208)4.3.8Deleting Groups (209)4.4Exporting MASCHINE Objects and Audio (210)4.4.1Saving a Group with its Samples (211)4.4.2Saving a Project with its Samples (212)4.4.3Exporting Audio (214)4.5Importing Third-Party File Formats (221)4.5.1Loading REX Files into Sound Slots (221)4.5.2Importing MPC Programs to Groups (222)5Playing on the Controller (226)5.1Adjusting the Pads (226)5.1.1The Pad View in the Software (226)5.1.2Choosing a Pad Input Mode (228)5.1.3Adjusting the Base Key (231)5.1.4Using Choke Groups (233)5.1.5Using Link Groups (235)5.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (238)5.3Adjusting the Base Key (239)5.4Playing Tools (240)5.4.1Mute and Solo (241)5.4.2Choke All Notes (245)5.4.3Groove (246)5.4.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (248)5.4.5Tap Tempo (252)5.5Performance Features (253)5.5.1Overview of the Perform Features (253)5.5.2Selecting a Scale and Creating Chords (256)5.5.3Scale and Chord Parameters (256)5.5.4Creating Arpeggios and Repeated Notes (262)5.5.5Swing on Note Repeat / Arp Output (267)5.6Using Lock Snapshots (268)5.6.1Creating a Lock Snapshot (268)5.6.2Using Extended Lock (269)5.6.3Updating a Lock Snapshot (269)5.6.4Recalling a Lock Snapshot (270)5.6.5Morphing Between Lock Snapshots (270)5.6.6Deleting a Lock Snapshot (271)5.6.7Triggering Lock Snapshots via MIDI (272)5.7Using the Smart Strip (274)5.7.1Pitch Mode (274)5.7.2Modulation Mode (275)5.7.3Perform Mode (275)5.7.4Notes Mode (276)6Working with Plug-ins (277)6.1Plug-in Overview (277)6.1.1Plug-in Basics (277)6.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (281)6.1.3Loading, Removing, and Replacing a Plug-in (281)6.1.3.1Browser Plug-in Slot Selection (287)6.1.4Adjusting the Plug-in Parameters (290)6.1.5Bypassing Plug-in Slots (290)6.1.6Using Side-Chain (292)6.1.7Moving Plug-ins (292)6.1.8Alternative: the Plug-in Strip (294)6.1.9Saving and Recalling Plug-in Presets (294)6.1.9.1Saving Plug-in Presets (295)6.1.9.2Recalling Plug-in Presets (296)6.1.9.3Removing a Default Plug-in Preset (297)6.2The Sampler Plug-in (298)6.2.1Page 1: Voice Settings / Engine (300)6.2.2Page 2: Pitch / Envelope (302)6.2.3Page 3: FX / Filter (305)6.2.4Page 4: Modulation (307)6.2.5Page 5: LFO (309)6.2.6Page 6: Velocity / Modwheel (311)6.3Using Native Instruments and External Plug-ins (313)6.3.1Opening/Closing Plug-in Windows (313)6.3.2Using the VST/AU Plug-in Parameters (316)6.3.3Setting Up Your Own Parameter Pages (317)6.3.4Using VST/AU Plug-in Presets (322)6.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (325)7Working with Patterns (326)7.1Pattern Basics (326)7.1.1Pattern Editor Overview (327)7.1.2Navigating the Event Area (333)7.1.3Following the Playback Position in the Pattern (335)7.1.4Jumping to Another Playback Position in the Pattern (337)7.1.5Group View and Keyboard View (338)7.1.6Adjusting the Arrange Grid and the Pattern Length (341)7.1.7Adjusting the Step Grid and the Nudge Grid (344)7.2Recording Patterns in Real Time (349)7.2.1Recording Your Patterns Live (349)7.2.2The Record Prepare Mode (352)7.2.3Using the Metronome (353)7.2.4Recording with Count-in (354)7.2.5Quantizing while Recording (356)7.3Recording Patterns with the Step Sequencer (356)7.3.1Step Mode Basics (356)7.3.2Editing Events in Step Mode (359)7.3.3Recording Modulation in Step Mode (361)7.4Editing Events (361)7.4.1Editing Events with the Mouse: an Overview (362)7.4.2Creating Events/Notes (365)7.4.3Selecting Events/Notes (366)7.4.4Editing Selected Events/Notes (372)7.4.5Deleting Events/Notes (378)7.4.6Cut, Copy, and Paste Events/Notes (381)7.4.7Quantizing Events/Notes (383)7.4.8Quantization While Playing (385)7.4.9Doubling a Pattern (386)7.4.10Adding Variation to Patterns (387)7.5Recording and Editing Modulation (391)7.5.1Which Parameters Are Modulatable? (392)7.5.2Recording Modulation (393)7.5.3Creating and Editing Modulation in the Control Lane (395)7.6Creating MIDI Tracks from Scratch in MASCHINE (401)7.7Managing Patterns (403)7.7.1The Pattern Manager and Pattern Mode (403)7.7.2Selecting Patterns and Pattern Banks (406)7.7.3Creating Patterns (408)7.7.4Deleting Patterns (410)7.7.5Creating and Deleting Pattern Banks (411)7.7.6Naming Patterns (413)7.7.7Changing the Pattern’s Color (415)7.7.8Duplicating, Copying, and Pasting Patterns (416)7.7.9Moving Patterns (419)7.7.10Adjusting Pattern Length in Fine Increments (420)7.8Importing/Exporting Audio and MIDI to/from Patterns (421)7.8.1Exporting Audio from Patterns (421)7.8.2Exporting MIDI from Patterns (422)7.8.3Importing MIDI to Patterns (425)8Audio Routing, Remote Control, and Macro Controls (434)8.1Audio Routing in MASCHINE (435)8.1.1Sending External Audio to Sounds (436)8.1.2Configuring the Main Output of Sounds and Groups (441)8.1.3Setting Up Auxiliary Outputs for Sounds and Groups (446)8.1.4Configuring the Master and Cue Outputs of MASCHINE (450)8.1.5Mono Audio Inputs (456)8.1.5.1Configuring External Inputs for Sounds in Mix View (457)8.2Using MIDI Control and Host Automation (461)8.2.1Triggering Sounds via MIDI Notes (462)8.2.2Triggering Scenes via MIDI (469)8.2.3Controlling Parameters via MIDI and Host Automation (471)8.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (479)8.2.5Sending MIDI from Sounds (480)8.3Creating Custom Sets of Parameters with the Macro Controls (484)8.3.1Macro Control Overview (485)8.3.2Assigning Macro Controls Using the Software (486)8.3.3Assigning Macro Controls Using the Controller (492)9Controlling Your Mix (494)9.1Mix View Basics (494)9.1.1Switching between Arrange View and Mix View (494)9.1.2Mix View Elements (495)9.2The Mixer (497)9.2.1Displaying Groups vs. Displaying Sounds (498)9.2.2Adjusting the Mixer Layout (500)9.2.3Selecting Channel Strips (501)9.2.4Managing Your Channels in the Mixer (502)9.2.5Adjusting Settings in the Channel Strips (504)9.2.6Using the Cue Bus (508)9.3The Plug-in Chain (510)9.4The Plug-in Strip (511)9.4.1The Plug-in Header (513)9.4.2Panels for Drumsynths and Internal Effects (515)9.4.3Panel for the Sampler (516)9.4.4Custom Panels for Native Instruments Plug-ins (519)9.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (523)9.5Controlling Your Mix from the Controller (525)9.5.1Navigating Your Channels in Mix Mode (526)9.5.2Adjusting the Level and Pan in Mix Mode (527)9.5.3Mute and Solo in Mix Mode (528)9.5.4Plug-in Icons in Mix Mode (528)10Using the Drumsynths (529)10.1Drumsynths – General Handling (530)10.1.1Engines: Many Different Drums per Drumsynth (530)10.1.2Common Parameter Organization (530)10.1.3Shared Parameters (533)10.1.4Various Velocity Responses (533)10.1.5Pitch Range, Tuning, and MIDI Notes (533)10.2The Kicks (534)10.2.1Kick – Sub (536)10.2.2Kick – Tronic (538)10.2.3Kick – Dusty (541)10.2.4Kick – Grit (542)10.2.5Kick – Rasper (545)10.2.6Kick – Snappy (546)10.2.7Kick – Bold (548)10.2.8Kick – Maple (550)10.2.9Kick – Push (551)10.3The Snares (553)10.3.1Snare – Volt (555)10.3.2Snare – Bit (557)10.3.3Snare – Pow (559)10.3.4Snare – Sharp (560)10.3.5Snare – Airy (562)10.3.6Snare – Vintage (564)10.3.7Snare – Chrome (566)10.3.8Snare – Iron (568)10.3.9Snare – Clap (570)10.3.10Snare – Breaker (572)10.4The Hi-hats (574)10.4.1Hi-hat – Silver (575)10.4.2Hi-hat – Circuit (577)10.4.3Hi-hat – Memory (579)10.4.4Hi-hat – Hybrid (581)10.4.5Creating a Pattern with Closed and Open Hi-hats (583)10.5The Toms (584)10.5.1Tom – Tronic (586)10.5.2Tom – Fractal (588)10.5.3Tom – Floor (592)10.5.4Tom – High (594)10.6The Percussions (595)10.6.1Percussion – Fractal (597)10.6.2Percussion – Kettle (600)10.6.3Percussion – Shaker (602)10.7The Cymbals (606)10.7.1Cymbal – Crash (608)10.7.2Cymbal – Ride (610)11Using the Bass Synth (613)11.1Bass Synth – General Handling (614)11.1.1Parameter Organization (614)11.1.2Bass Synth Parameters (616)12Using Effects (618)12.1Applying Effects to a Sound, a Group or the Master (618)12.1.1Adding an Effect (618)12.1.2Other Operations on Effects (627)12.1.3Using the Side-Chain Input (629)12.2Applying Effects to External Audio (632)12.2.1Step 1: Configure MASCHINE Audio Inputs (632)12.2.2Step 2: Set up a Sound to Receive the External Input (635)12.2.3Step 3: Load an Effect to Process an Input (637)12.3Creating a Send Effect (639)12.3.1Step 1: Set Up a Sound or Group as Send Effect (639)12.3.2Step 2: Route Audio to the Send Effect (644)12.3.3 A Few Notes on Send Effects (646)12.4Creating Multi-Effects (647)13Effect Reference (650)13.1Dynamics (651)13.1.1Compressor (651)13.1.2Gate (655)13.1.3Transient Master (659)13.1.4Limiter (661)13.1.5Maximizer (665)13.2Filtering Effects (668)13.2.1EQ (668)13.2.2Filter (671)13.2.3Cabinet (675)13.3Modulation Effects (676)13.3.1Chorus (676)13.3.2Flanger (678)13.3.3FM (680)13.3.4Freq Shifter (681)13.3.5Phaser (683)13.4Spatial and Reverb Effects (685)13.4.1Ice (685)13.4.2Metaverb (687)13.4.3Reflex (688)13.4.4Reverb (Legacy) (690)13.4.5Reverb (692)13.4.5.1Reverb Room (692)13.4.5.2Reverb Hall (695)13.4.5.3Plate Reverb (698)13.5Delays (700)13.5.1Beat Delay (700)13.5.2Grain Delay (703)13.5.3Grain Stretch (705)13.5.4Resochord (707)13.6Distortion Effects (709)13.6.1Distortion (709)13.6.2Lofi (711)13.6.3Saturator (713)13.6.4Analog Distortion (716)13.7Perform FX (718)13.7.1Filter (719)13.7.2Flanger (721)13.7.3Burst Echo (724)13.7.4Reso Echo (726)13.7.5Ring (729)13.7.6Stutter (731)13.7.7Tremolo (734)13.7.8Scratcher (737)14Working with the Arranger (740)14.1Arranger Basics (740)14.1.1Navigating the Arranger (743)14.1.2Following the Playback Position in Your Project (745)14.1.3Jumping to Other Sections (746)14.2Using Ideas View (748)14.2.1Scene Overview (748)14.2.2Creating Scenes (750)14.2.3Assigning and Removing Patterns (751)14.2.4Selecting Scenes (755)14.2.5Deleting Scenes (757)14.2.6Creating and Deleting Scene Banks (758)14.2.7Clearing Scenes (759)14.2.8Duplicating Scenes (759)14.2.9Reordering Scenes (761)14.2.10Making Scenes Unique (762)14.2.11Appending Scenes to Arrangement (763)14.2.12Naming Scenes (764)14.2.13Changing the Color of a Scene (765)14.3Using Arranger View (767)14.3.1Section Management Overview (767)14.3.2Creating Sections (772)14.3.3Assigning a Scene to a Section (773)14.3.4Selecting Sections and Section Banks (774)14.3.5Reorganizing Sections (778)14.3.6Adjusting the Length of a Section (779)14.3.6.1Adjusting the Length of a Section Using the Software (781)14.3.6.2Adjusting the Length of a Section Using the Controller (782)14.3.7Assigning and Removing Patterns (783)14.3.8Duplicating Sections (785)14.3.8.1Making Sections Unique (786)14.3.9Removing Sections (787)14.3.10Renaming Scenes (789)14.3.11Clearing Sections (790)14.3.12Creating and Deleting Section Banks (791)14.3.13Enabling Auto Length (792)14.3.14Looping (793)14.3.14.1Setting the Loop Range in the Software (793)14.4Playing with Sections (794)14.4.1Jumping to another Playback Position in Your Project (795)14.5Triggering Sections or Scenes via MIDI (796)14.6The Arrange Grid (798)14.7Quick Grid (800)15Sampling and Sample Mapping (801)15.1Opening the Sample Editor (801)15.2Recording a Sample (802)15.2.1Opening the Record Page (802)15.2.2Selecting the Source and the Recording Mode (803)15.2.3Arming, Starting, and Stopping the Recording (806)15.2.5Checking Your Recordings (810)15.2.6Location and Name of Your Recorded Samples (813)15.3Editing a Sample (814)15.3.1Using the Edit Page (814)15.3.2Audio Editing Functions (820)15.4Slicing a Sample (828)15.4.1Opening the Slice Page (829)15.4.2Adjusting the Slicing Settings (830)15.4.3Live Slicing (836)15.4.3.1Live Slicing Using the Controller (836)15.4.3.2Delete All Slices (837)15.4.4Manually Adjusting Your Slices (837)15.4.5Applying the Slicing (844)15.5Mapping Samples to Zones (850)15.5.1Opening the Zone Page (850)15.5.2Zone Page Overview (851)15.5.3Selecting and Managing Zones in the Zone List (853)15.5.4Selecting and Editing Zones in the Map View (858)15.5.5Editing Zones in the Sample View (862)15.5.6Adjusting the Zone Settings (865)15.5.7Adding Samples to the Sample Map (872)16Appendix: Tips for Playing Live (875)16.1Preparations (875)16.1.1Focus on the Hardware (875)16.1.2Customize the Pads of the Hardware (875)16.1.3Check Your CPU Power Before Playing (875)16.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (876)16.1.5Consider Using a Limiter on Your Master (876)16.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (876)16.1.7Improvise (876)16.2Basic Techniques (876)16.2.1Use Mute and Solo (876)16.2.2Use Scene Mode and Tweak the Loop Range (877)16.2.3Create Variations of Your Drum Patterns in the Step Sequencer (877)16.2.4Use Note Repeat (877)16.2.5Set Up Your Own Multi-effect Groups and Automate Them (877)16.3Special Tricks (878)16.3.1Changing Pattern Length for Variation (878)16.3.2Using Loops to Cycle Through Samples (878)16.3.3Using Loops to Cycle Through Samples (878)16.3.4Load Long Audio Files and Play with the Start Point (878)17Troubleshooting (879)17.1Knowledge Base (879)17.2Technical Support (879)17.3Registration Support (880)17.4User Forum (880)18Glossary (881)Index (889)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE Getting Started: This document provides a practical approach to MASCHINE viaa set of tutorials covering easy and more advanced tasks in order to help you familiarizeyourself with MASCHINE.2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:▪Controller Editor Manual: Besides using your MASCHINE hardware controller together withits dedicated MASCHINE software, you can also use it as a powerful and highly versatileMIDI controller to pilot any other MIDI-capable application or device. This is made possibleby the Controller Editor software, an application that allows you to precisely define all MIDIassignments for your MASCHINE controller. The Controller Editor was installed during theMASCHINE installation procedure. For more information on this, please refer to the Con-troller Editor Manual available as a PDF file via the Help menu of Controller Editor.▪Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN We recommend that you follow along with these instructions while the respective appli-cation is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues. The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information can be expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software and paths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in the software is printed in blue. Whenever you see this formatting applied, you will find the same text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you see this formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you see this formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.Unlabeled Buttons on the ControllerThe buttons and knobs above and below the displays on your MASCHINE controller do not have labels.1234567812345678The unlabeled buttons and knobs on the MASCHINE controller.For better reference, we applied a special formatting here: throughout the document, the ele-ments are capitalized and numbered, so the buttons above the displays are written Button 1 to Button 8, while the knobs under the displays are written Knob 1 to Knob 8. E.g., whenever you see an instruction such as “Press Button 2 to open the EDIT page,” you’ll know it’s the second button from the left above the displays.1.3New Features in MASCHINE2.6.11The following two new features have been added to MASCHINE 2.6.11 and are only aimed at MASCHINE MK3 users:▪Introduction of the General, Audio, MIDI and Hardware Preferences direct from the MA-SCHINE MK3 controller using the SETTINGS button. For more information on using the Preferences from the hardware, refer to each section of the following chapter: ↑2.6, Prefer-ences.。
NStar ™Access Control SystemF E AT U R E SThe Honeywell Access Systems’ NStar ™is an access control system designed to provide a cost effective solution for entry level applications plus the ability to seamlessly expand and adapt to future growth needs. The NStar system is composed of the new NS2 control panel and NStar access control software. With NStar you can start small and easily expand and upgrade your access control system as your needs change.The NS2 controller is ideal for the needs of a small system application. It offers simplicity to satisfy basic application needs combined with state-of-the-art technology, processing power and speed not usually found in an entry-level product.The NS2’s architecture includes unprecedented scalability allowing for easy system expansions or future technology updates via a unique XPort expansion port. Whether you need to add doors or system functions, the NS2 gives you a clear path to future growth.NStar software is a comprehensive access control application designed for use with the NS2 controller. NStar provides fast installation and setup with Quick Start Configuration Wizards and simple operation via user-defined control and viewing of system status and an event viewer for real-time observation of system activities. If you want to go beyond the basics, an option package that includes video badging, real-time alarm pop ups, digital video integration and networking is available to meet future needs.No matter how small you start or how large you grow, NStar offers seamless integration of existing systems and future technology to provide you with a superbly compatible access control solution.•Complete two-door access control system •Easy-to-order starter & expansion kits •Competitively priced •Quick Start Wizards•Two access points, expandable to 128 (max. via TCP/IP)•Real-time clock•2,000 users, expandable to 10,000•10,000 events, expandable to 100,000•Eight supervised input points •Four relays, SPDT 12A @ 28VDC •32-bit processor•Communications: RS-232 standard or RS-485 optional•Optional TCP/IP interface •XPort expansion port •Removable terminal blocks •Microsoft ®Windows ®2000Professional, XP Professional and Windows ®2003 Server compatible •Microsoft Data Engine (MSDE)•UL294 Listed/security/ukAccess Control SystemNStar ™Database:•Microsoft Data Engine (MSDE)Access Control:•Maximum 10,000 cardholder capacity •Host Grant•32 holidays with multiple holiday types •Supports up to 128 readers via TCP/IP , 124 via RS-232Operational Functionality:•System tree for monitoring & control •Event viewer•Scheduling for dial-up locations •Batch card add and card delete •Card activation/deactivation by day/month/year•Assign multiple cards to a cardholder •40definable cardholder note fields ¬e field templates•Monitoring of database file size and hard disk space•Database backup scheduler •Play .wav audio files based on eventsReporting:History Reports:•Time and date and from archived history •Reader(s)•Cardholder•Descriptive cardholder field •Transaction type •Alarm point stateOperator Actions:•Time and date •Operator•Actions performed by operator •Device(s) operatedDatabase Reports:•Cardholders •Access levels •Time zones •SchedulesOther:•Up to 64 IP connections (using optional networking hardware)•Two serial ports•Context sensitive help via F1 key provides help on any selected function•Software TutorialS P EC I F I C AT I O N SQuick Start Wizards guide you through installation and provide fast and simple setup of NStar ™software.Control MapEasy to understand control maps with color coded status icons give you a complete picture of your system and condition of each device.Event ViewerThe Event View window displays current system activity in real time.•Quick Start Configuration Wizardsaves time in setup and programming •Supports TCP/IP connection with optional NSLAN1 to make use of existing network infrastructure •40user-defined cardholder note fields provide more information for system operators•Database & hard drive limit and capacity prompts notify user when maintenance is required•Scheduler backup utility automaticallymaintains a recent NStar database •Easy viewing of device status by color,shape and pop-up text that are arranged on a tree structure •Powerful 32-bit processor provides uninterrupted card activity and fast downloads of users and events •XPort expansion port provides flexibility for future growth•Flash memory allows convenient upgrades & technology updates •Real-time clock ensures accuracy of system times and schedules •Flexible mounting-fits in existingwall-mount enclosure or in a optional 19" rack•Cost-effective access control solution •Color-coded real-time events in the standard viewer helps organize the monitoring taskB E N E F I T SR E C O M M E N D E D C O N F I G U R AT I O NMinimum Computer Configuration:•Pentium III - 1 GHz CPU•256 megabytes of RAM•2.1 gigabyte hard disk•Two serial communication ports •Tape backup drive•One parallel port (badging to be done on workstation)•15" SVGA color monitor(1024 x 768, 256 color)•Supported operating systems:-Microsoft®Windows XPProfessional-Windows®2000 Professional-Windows®2003 ServerEasy to Install:•Removable terminal blocks allow fast connections and simplified wiring •RJ45 serial connection from the panel to the PC allows for quick installation•No jumpers or reset switches make installation error-freeExpandable & Upgradable:•XPort expansion port allows for future expansion with devices including memory expansion•FLASH memory means never having to replace a firmware chip to take advantage of system upgrades or new featuresScalable:•Two access points, expandableto 128 allows you to growwith NStar and NS2•2,000 users, expandable to 10,000•10,000 events, expandable to100,000Powerful 32-bit Processor:•32-bit processor provides power forfast downloads of events and usersand uninterrupted card activity•Ample processing power to supportfuture system growthOptional Ethernet Connection:•Onboard connector providesEthernet to serial interface usingexisting Ethernet devicesSuperCap Battery:•Maintenance-free backup of panelprogramming and data storage -never have to replace battery•SuperCap battery will providememory backup for one weekwithout any system powerReal-time Clock:•The real-time clock gives youcomplete system time accuracy•Automatic day-light savings time andleap yearFlexible Mounting:•Tile or rack mountable in standard 19"high-density enclosure. Up to eightNS2 panels in a single 19" rack.Card Format Compatibility:•26- (Standard), 32- and 34-(Honeywell) bit Wiegand formatsupportDimensions:Board: 9" W x 5.5" H x 1" DEnclosure: 12.5" W x 14.5" H x 3.5" DEnvironmental:Temperature: 35-110°F operationalHumidity: 0 - 85% RHNC3/security/ukS P E C I F I C AT I O N SAccess Control SystemNStar ™Software OptionsThe NStar Software Option Package offers an upgrade for users with greater needs.This package offers the ability to add Photo-ID Badging, Alarm/EventMonitoring, Digital Video Integration and the ability to network multiple PC’s together. The option package can be activated immediately upon registration of software.Photo-ID BadgingNStar’s badging option enables you to create your own custom Photo-ID’s.With the easy to use interface you can add pictures, company logos, colorful text and background. Once the badging option is enabled you will have the ability of using the Auto Card pop-up feature.This will allow you to verify a card holder by their picture stored in the database.Alarm View / System EventsThe Alarm View allows you to monitor your entire system in real-time. With the Alarm View, alarms and events will “pop-up” on the screen so you can see events and alarms as they happen. Alarm View allows you to respond quickly toemergencies or threats to your employees or building.Digital Video IntegrationSave time reviewing video tapes by using NStar’s integrated digital video system that allows you to retrieve stored video from a Rapid Eye Digital Video Recorder (DVR).Control live cameras while monitoring others from the digital video pop-up plete PTZ control including eight presets and up to 16 cameras can be viewed in one pop-up window.Optional UpgradesThe following optional features are available with the NSOPT1 software upgrade:•Networking - up to five concurrent users•Prioritized alarms - 1 to 99 priorities •Alarm messages and operator notes •Integrated digital video (Rapid Eye) with PTZ control•Alarm and video pop-up •System events viewer •Photo-ID badging•Magnetic stripe encoding•Duplex printing - two-sided badge printingNStar ™is a trademark of Honeywell International, Inc.Microsoft ®,Microsoft Windows ®,Windows ®Server 2003®,Windows ®XP and Windows ®2000 are registered trademarks of Microsoft Corporation.HAS-NSTAR-01-EN(0407)DS-LD April 2007©2007 Honeywell International, Inc.Honeywell Access Systems UKCharles Avenue Burgess Hill West Sussex.RH15 9UF 01444 25118001444 871074/security/ukFor more information: /security/uk。
bgn itime的用法BGN itime的用法BGN itime是一款功能强大的时间管理工具,以下是一些常用的用法:1. 创建任务•在时间线上右键单击,选择“新建任务”。
•在弹出的对话框中填写任务的标题、开始时间和结束时间,点击“确定”。
2. 设置提醒•在任务列表中选中需要设置提醒的任务。
•点击工具栏上的“设置提醒”按钮。
•在弹出的对话框中选择提醒类型和提醒时间,点击“确定”。
3. 分配任务•在任务列表中选中需要分配的任务。
•点击工具栏上的“分配任务”按钮。
•在弹出的对话框中选择任务负责人和截止日期,点击“确定”。
4. 设置重要性和优先级•在任务列表中选中需要设置重要性和优先级的任务。
•点击工具栏上的“设置重要性和优先级”按钮。
•在弹出的对话框中选择重要性和优先级,点击“确定”。
5. 搜索任务•在搜索框中输入关键词,按下回车键或点击搜索图标。
•BGN itime将显示与关键词匹配的任务列表。
6. 查看任务详情•在任务列表中双击需要查看的任务。
•任务详情窗口将打开,显示任务的详细信息。
7. 导出任务列表•点击工具栏上的“导出任务列表”按钮。
•在弹出的对话框中选择导出格式和保存路径,点击“确定”。
以上是BGN itime的一些常用用法,它可以帮助你有效地管理时间和任务,提高工作效率。
使用BGN itime,你将更好地组织和规划自己的工作和生活。
8. 设置任务分类•在任务列表中选中需要设置分类的任务。
•点击工具栏上的“设置分类”按钮。
•在弹出的对话框中选择或创建任务分类,点击“确定”。
9. 执行任务•在任务列表中选中需要执行的任务。
•点击工具栏上的“执行任务”按钮。
•根据任务的要求和时间安排,逐步完成任务。
10. 查看任务进度•在任务列表中选中需要查看进度的任务。
•点击工具栏上的“查看进度”按钮。
•BGN itime将显示任务的完成情况和进度百分比。
11. 设置任务间的依赖关系•在任务列表中选中需要设置依赖关系的任务。
TenAsys实时操作系统入门1 INtime体系结构2 INtime的安装使用3 INtime试用版3.0例程作者:sigwell试用版下载:/Intime1 INtime体系结构1.1 INtime概述目前,人们正在越来越多地选择Microsoft Windows XP 和Windows XP Embedded 操作系统来运行满足某种特定需求的专用应用程序。
Windows XP Embedded 与 Windows XP 桌面软件是基于相同的二进制文件,它们在许多方面都是可供选择的最佳平台。
但是,当应用需要操作系统提供严格的实时接口和功能时, Windows XP Embedded 和 Windows XP 由于自身的原因而无法满足设计者的要求。
针对这方面的需求,人们已经开发出很多面向 Windows XP 平台添加实时扩展的方案,向Windows XP 内核设备驱动程序级提供某种实时功能,但此类解决方案基本上都没有考虑开发环境的易用性和健壮性,也没有考虑和已有的广泛的Windows应用程序资源共享。
INtime软件不仅能在Windows环境中为应用程序添加时间确定性的行为,而且使那些实时应用程序能够达到健壮、可靠和可伸缩性。
TenAsys的设计使INtime能可靠的在Windows系统中运行,且不影响Windows的原来的应用,同时也保证Windows的重大错误不会传递给INtime而导致整个系统崩溃,甚至不影响其他应用程序(它们之间存在显式交互的情形除外)。
TenAsys INtime 软件所采取的方法是在加载 Windows 操作系统的同时加载一个实时操作系统,以便它们共享相同的 CPU 和中断硬件,但在其他方面相互独立。
每个操作系统都被封装为一个虚拟机,各自具有自己的描述符表、内存管理等等。
当实时活动必须发生时,计算机上下文将切换到该实时操作系统。
当这些活动完成后,计算机上下文将切换回Windows 操作系统。
因为INtime实时操作系统独立于 Windows 操作系统软件,所以可以增强运行实时进程的环境,以及添加附加功能以提高整个平台的健壮性。
添加INtime实时功能的平台的典型案例是将应用分成两种不同的部分:一些部分不需要实时服务,而利用 Windows XP 平台的功能;另一些部分需要实时内核的实时性能。
进程间通讯 (IPC) 服务从实时内核进行扩展,以使 Windows 应用程序能够共享对在实时内核上创建的对象的访问。
数据采集应用程序即为一个简单的例子,其中实时进程负责驱动硬件接口和处理收到的数据,而 Windows 进程提供操作员界面并显示结果。
这两种进程都可以用 Microsoft Visual Studio 工具开发,其中 C 和 C++ 由实时环境进行支持。
TenAsys Corporation 的 INtime 软件被设计为不仅能够向 Windows 平台添加实时功能,而且其添加这些功能的方式能够为实时应用程序提供可靠且可伸缩的平台。
如果将该解决方案与Windows XP Embedded 配合使用,则能够为您的嵌入式设备提供健壮的、可伸缩的、确定性的操作系统。
1.2 INtime基本架构INtime 是被设计为与Windows操作系统共享硬件平台的实时操作系统。
Windows中安装的组件包括一个Windows内核驱动程序和一些Windows服务。
该驱动程序管理用于运行内核和实时应用程序的内存,并且管理这两个系统之间的通讯接口。
一个Windows服务将实时内核加载到已分配的内存中,然后使上下文从 Windows 切换到 INtime内核。
INtime将创建一个低优先级线程,用于把Windows的任务压缩后放入该线程。
在INtime任务结束以后,该线程负责将计算机上下文切换回 Windows 系统。
因为该线程的优先级仅高于INtime Idle线程,低于所有其他实时线程。
所以,只要牵涉到Intime 实时内核任务在运行时,Windows任务都是处于等待状态。
在 INtime 上下文时,任何实时中断都被直接处理,并且所有其他中断都被屏蔽。
当上下文返回到 Windows 时,非INtime的中断将被解除屏蔽,以使其可以被 Windows 正常处理。
当在 Windows 上下文中发生实时中断时,将插入Windows IDT以引起到INtime上下文的上下文切换,以便可以处理中断。
系统计时器通常在 Windows 和 INtime 之间共享。
硬件计时器被改编以便按比Windows 要求的速率更高的速率中断,并且只根据需要调用 Windows 处理程序。
通常情况下,INtime 内核以高得多的速率(时间间隔可以低至 100μs)获得计时器中断,以便提供更细粒度的计时服务。
计时器处理优化能够避免在 Windows 和 INtime 之间进行不必要的上下文切换。
另外,Windows某些硬件抽象层 (HAL) 入口点被截获和监控,以防止Windows 内核执行某些不需要的操作,例如屏蔽实时中断或者更改硬件系统计时器频率。
INtime不是由通过修改或替换Windows的HAL.DLL文件实现硬件抽象层的入口点截获和监控的,而是通过修改已载入内存中的HAL.DLL实现的。
INtime 内核为实时虚拟机提供操作系统服务。
它提供此类内核通常会提供的实时服务,包括一个基于优先级的抢占式调度程序,该程序执行基于优先级的中断处理。
线程优先级的范围是从0(最高优先级)到 255(最低优先级),低于可配置的优先级阈值的线程可以与多个具有相同优先级的线程分享其时间片。
内核计划程序已经进行优化,以获得最佳的中断性能。
1.3 应用程序环境INtime 应用程序环境被设计为具有下列功能:¾每个进程都是其他对象(包括线程和物理内存)的容器。
由该进程所属线程创建的每个对象都由该进程所有,并且在进程终止时不再存在。
¾每个进程都具有一个与其他进程的地址空间隔离的平面虚拟地址空间。
进程中的代码以用户模式(IA 权限等级3)执行,从而防止意外访问系统对象和数据。
¾每个进程都可以直接访问处理器的输入/输出 (I/O) 空间,而且可以直接访问物理内存。
¾在任何进程中,都可以通过系统调用以及用户为中断处理程序和线程编写的代码来直接处理中断。
¾错误是按进程分别处理的。
默认情况下会挂起出错的线程,并且向全局邮箱中写入一个记录。
可以更改默认操作,以便能够在出错地址进入静态系统调试器或应用程序调试器。
进程还可以选择获得有关该进程中错误的通知。
¾提供了多个 API 以便进程可以使用系统服务。
下面的部分中将详细介绍这些 API。
¾通过将请求转发给Windows服务以执行所请求的操作,向实时应用程序提供 Windows 服务(对注册表、事件日志和文件系统的访问)。
1.4 实时 APIINtime 内核提供的标准 API 提供了适合于同步和通讯的对象,以及在进程之间(包括INtime 和 Windows 进程之间)共享内存的手段。
所有对象都通过句柄引用,并且所有句柄对于实时系统都是全局的。
实时 API 提供参数检查和内联状态报告。
¾进程(Process)进程拥有其他对象(包括其他进程)和物理内存。
当进程创建时,将向其分配一个内存池,它限制了可以分配给该进程的物理内存的数量。
尽管 INtime 内核使用分页硬件进行内存管理,但它并不采用请求调页功能。
因此,进程被限制在它可以分配的物理内存量的范围内。
进程还具有对象编录,可以在此命名对象。
可以按名称搜索该编录。
¾线程(Thread)线程总是由某个进程所有,并且线程所创建的对象由其进程所有.线程会被分配一个优先级,范围为从0到254,其中0是最高优先级。
¾信号量(Semaphores)这些同步对象由一个线程队列和一个计数器组成,类似于Microsoft Win32 信号量。
对象创建时,所有 INtime 线程队列都可以被指定为先入先出(FIFO)队列或优先级队列。
如果是FIFO队列,则线程按照等待顺序排队;如果是优先级队列,则线程的排队方式为优先级较高的线程出现在队头。
¾区域(Region)这些对象是单个单元信号量,带有防止优先级颠倒的保护。
它们采用标准的优先级提升技术,以避免这种情况。
另外,拥有区域的线程不能删除,除非它放弃该区域。
这些对象类似于 Win32 临界区。
¾邮箱(MailBox)这些对象由一个线程队列和一个消息队列组成。
邮箱可以将两种类型的消息排队。
消息可以是其他对象的句柄,也可以是最多包含 128 个字节的数据消息。
在 Win32 中没有直接等效的对象。
¾堆(Heap)堆对象类似于 Windows 堆。
它为应用程序提供动态内存源。
¾其他内存对象可以为内存区域创建一个句柄,并且随后将该句柄传递给另一个进程以进行映射。
然后,可以从这两个进程中访问该内存。
1.5 Windows接口支持¾Win32 API尽管Win32 API 缺少一些用于实时编程的有用功能,INtime 仍然提供了一个 Win32 API,以便方便地从 Windows 应用程序传输代码。
该实现是 Windows CE Win32 实现的丰富子集,包括 Win32 对象的有用子集 (WaitForMultipleObjects),并带有扩展以管理中断和外围设备互联 (PCI) 总线配置。
¾Windows API为 Windows 应用程序提供了 API,以使其能够共享在实时内核上创建的对象。
标准的实时对象和 Win32 对象都是可共享的,以便 Windows 和实时应用程序可以同步和共享数据。
阻塞调用由实时内核上的代理线程池处理。
¾ C 库与 C++ 支持INtime 提供了美国国家标准局(与 ANSI 兼容)的 C 库,以及用标准模板库 (STL) 提供了对 EC++ (Embedded C++) ANSI 标准的支持。
¾其他服务提供了一个传输控制协议/网际协议 (TCP/IP) 的协议组,它派生于 BSD Net3 体系结构。
为 Intel、3Com 和 Realtek 接口适配器提供了以太网驱动程序,并且为与 NE2000 兼容的 ISA 接口提供了以太网驱动程序。
通过串行线路网际协议 (SLIP) 支持串行链路。
以开发工具包的形式提供了 USB 支持,以便开发 USB 客户端软件。
为 Universal Host Controller (UHCI)、Open Host Controller (OHCI) 和 Enhanced Host Controller (EHCI) 接口提供了标准驱动程序。