机械设计基础课后答案(杨可桢)
- 格式:doc
- 大小:3.46 MB
- 文档页数:154
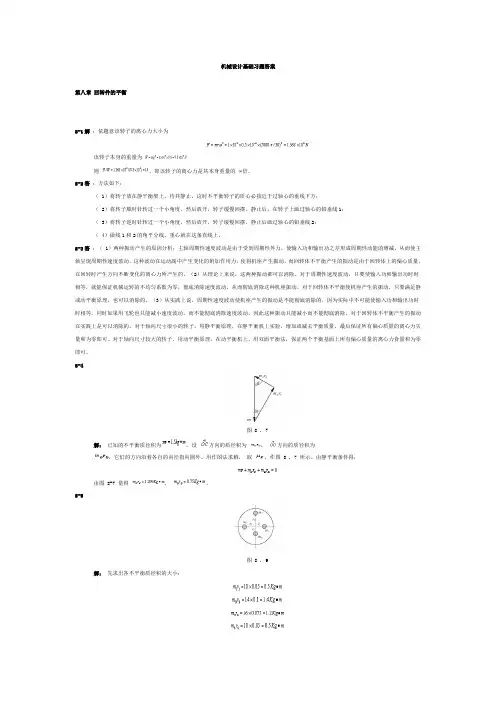
图8.11
解:〔1〕求质心偏移实际就是求静平衡时的平衡向静,因此可以按照静平衡条件考虑这个
问题。
先求出各不平衡质径积的大小:
方向沿着各自的向径指向外面。
用作图法求解,取,作图8.11〔a〕所示。
由静平衡条件得:
,偏移的方由图量得,那么质心偏移的距离为向就是平衡质
径积的方向,与水平夹角为。
(2〕求左右支反力实际上就是求动平衡时在左右支点所在平面所需要的平衡力。
先把
不平衡质量在两支承所在平面上分解。
左支承:;
右支承:;
那么在两个支承所在平面上的质径积的大小分别为:
左支承:;
右支承:;
方向沿着各自的向径指向外面。
用作图法求解,取,作图8.11〔b〕〔c〕所示。
由动平衡条件得:
左支承:,量得,
那么支反力大小为
右支承:,量得,
那么支反力大小为
8-7
图8.13
解:〔1〕先把不平衡质量在两平衡基面Ⅰ和Ⅱ上分解。
基面Ⅰ:
基面Ⅱ:。
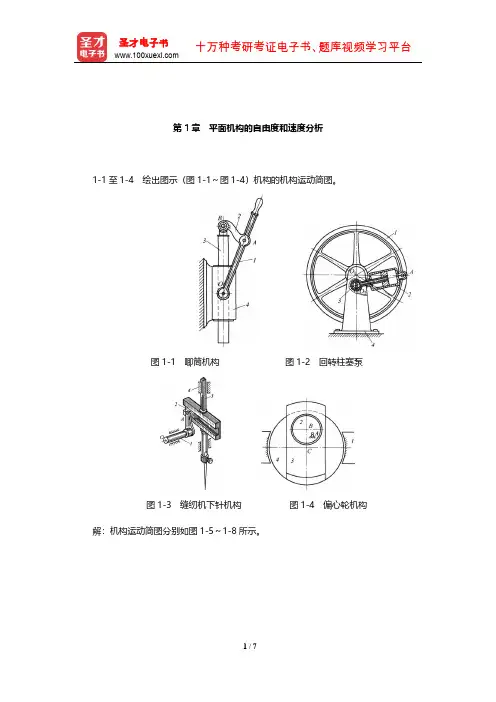
第1章平面机构的自由度和速度分析1-1至1-4 绘出图示(图1-1~图1-4)机构的机构运动简图。
图1-1 唧筒机构图1-2 回转柱塞泵图1-3 缝纫机下针机构图1-4 偏心轮机构解:机构运动简图分别如图1-5~1-8所示。
1-5至1-12 指出(图1-9~图1-16)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度。
图1-9 平炉渣口堵塞机构图1-10 锯木机机构图1-11 加药泵加药机构图1-12 测量仪表机构图1-13 缝纫机送布机构图1-14 冲压机构图1-15 差动轮系 图1-16 机械手解:图1-9 滚子处为局部自由度,。
图1-10 滚子处为局部自由度,。
图1-11。
图1-12。
图1-13 滚子处为局部自由度,。
图1-14 滚子处为局部自由度,右方三杆铰接处为复合铰链,下方两导程槽之一为虚约束,。
图1-15 最下方齿轮与机架,杆组成复合铰链,。
图1-16 3233233L H F n P P =--=⨯-⨯=。
1-13 求出图1-17导杆机构的全部瞬心和构件1、3的角速比。
图1-17 导杆机构解:该导杆机构的全部瞬心如图1-18所示。
由1141333413P P P P ωω=可得,杆件1、3的角速度比:3413131413P P P P ωω=。
1-14 求出图1-19正切机构的全部瞬心。
设1ω=10 rad /s ,求构件3的速度3ν。
图1-19 正切机构解:该正切机构的全部瞬心如图1-20所示。
由114133P P v ω=可得,构件3的速度:311413102002000v P P ω==⨯=。
1-15 图1-21所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,图试用瞬心法求轮1与轮2的角速比1ω/2ω。
图1-21 摩擦行星传动机构解:确定轮1、轮2和机架4三个构件的三个瞬心121424P P P 、、,如图1-22所示。
由于在行星轮2和构件1的瞬心12P 处,有12v v =,即11222r r ωω=⋅ 因此,轮1和轮2的角速比12212r r ωω=。
![机械设计基础课后习题答案[杨可桢等主编]第10章](https://uimg.taocdn.com/c8719c55bf1e650e52ea551810a6f524ccbfcbd8.webp)
基础课程教学资料10-1证明当升角与当量摩擦角符合时,螺纹副具有自锁性。
当时,螺纹副的效率所以具有自锁性的螺纹副用于螺旋传动时,其效率必小于50%。
10-2解由教材表10-1、表10-2查得,粗牙,螺距,中径螺纹升角,细牙,螺距,中径螺纹升角对于相同公称直径的粗牙螺纹和细牙螺纹中,细牙螺纹的升角较小,更易实现自锁。
10-3解查教材表10-1得粗牙螺距中径小径1 螺纹升角普通螺纹的牙侧角,螺纹间的摩擦系数当量摩擦角拧紧力矩由公式可得预紧力拉应力查教材表9-1得35钢的屈服极限拧紧所产生的拉应力已远远超过了材料的屈服极限,螺栓将损坏。
10-4解(1)升角当量摩擦角工作台稳定上升时的效率:(2)稳定上升时加于螺杆上的力矩(3)螺杆的转速螺杆的功率(4)因,该梯形螺旋副不具有自锁性,欲使工作台在载荷作用下等速下降,需制动装置。
其制动力矩为10-5解查教材表9-1得Q235的屈服极限,查教材表10-6得,当控制预紧力时,取安全系数由许用应力查教材表10-1得的小径由公式得预紧力由题图可知,螺钉个数,取可靠性系数牵曳力10-6解此联接是利用旋转中间零件使两端螺杆受到拉伸,故螺杆受到拉扭组合变形。
查教材表9-1得,拉杆材料Q275的屈服极限,取安全系数,拉杆材料的许用应力所需拉杆最小直径查教材表10-1,选用螺纹()。
10-7解查教材表9-1得,螺栓35钢的屈服极限,查教材表10-6、10-7得螺栓的许用应力查教材表10-1得,的小径螺栓所能承受的最大预紧力所需的螺栓预紧拉力则施加于杠杆端部作用力的最大值10-8解在横向工作载荷作用下,螺栓杆与孔壁之间无间隙,螺栓杆和被联接件接触表面受到挤压;在联接接合面处螺栓杆则受剪切。
假设螺栓杆与孔壁表面上的压力分布是均匀的,且这种联接的预紧力很小,可不考虑预紧力和螺纹摩擦力矩的影响。
挤压强度验算公式为:其中;为螺栓杆直径。
螺栓杆的剪切强度验算公式其中表示接合面数,本图中接合面数。
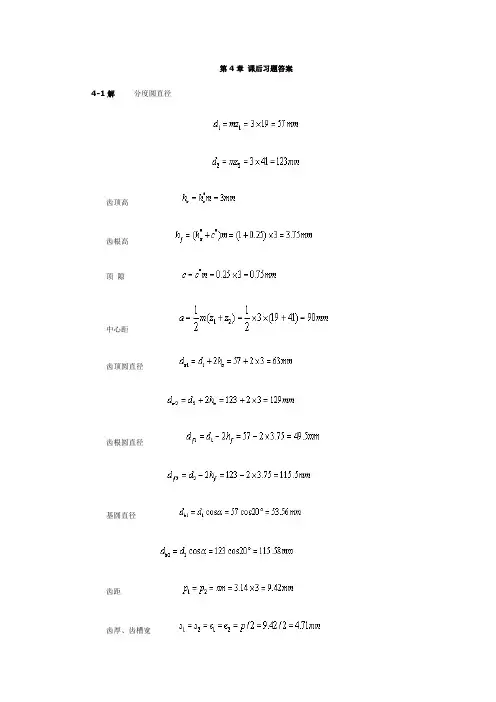
第4章课后习题答案4-1解分度圆直径齿顶高齿根高顶隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为0;压力角为。
齿顶圆半径齿顶圆上渐开线齿廓的曲率半径齿顶圆上渐开线齿廓的压力角4-5解正常齿制渐开线标准直齿圆柱齿轮的齿根圆直径:基圆直径假定则解得故当齿数时,正常齿制渐开线标准直齿圆柱齿轮的基圆大于齿根圆;齿数,基圆小于齿根圆。
4-6解中心距内齿轮分度圆直径内齿轮齿顶圆直径内齿轮齿根圆直径4-7 证明用齿条刀具加工标准渐开线直齿圆柱齿轮,不发生根切的临界位置是极限点正好在刀具的顶线上。
此时有关系:正常齿制标准齿轮、,代入上式短齿制标准齿轮、,代入上式图 4.7 题4-7解图4-8证明如图所示,、两点为卡脚与渐开线齿廓的切点,则线段即为渐开线的法线。
根据渐开线的特性:渐开线的法线必与基圆相切,切点为。
再根据渐开线的特性:发生线沿基圆滚过的长度,等于基圆上被滚过的弧长,可知:AC对于任一渐开线齿轮,基圆齿厚与基圆齿距均为定值,卡尺的位置不影响测量结果。
图 4.8 题4-8图图4.9 题4-8解图4-9解模数相等、压力角相等的两个齿轮,分度圆齿厚相等。
但是齿数多的齿轮分度圆直径大,所以基圆直径就大。
根据渐开线的性质,渐开线的形状取决于基圆的大小,基圆小,则渐开线曲率大,基圆大,则渐开线越趋于平直。
因此,齿数多的齿轮与齿数少的齿轮相比,齿顶圆齿厚和齿根圆齿厚均为大值。
4-10解切制变位齿轮与切制标准齿轮用同一把刀具,只是刀具的位置不同。
因此,它们的模数、压力角、齿距均分别与刀具相同,从而变位齿轮与标准齿轮的分度圆直径和基圆直径也相同。
故参数、、、不变。
变位齿轮分度圆不变,但正变位齿轮的齿顶圆和齿根圆增大,且齿厚增大、齿槽宽变窄。
因此、、变大,变小。
啮合角与节圆直径是一对齿轮啮合传动的范畴。

1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
![机械设计基础课后习题答案[杨可桢等主编]第12章](https://uimg.taocdn.com/56739424ce2f0066f4332268.webp)
根底课程教学资料渊,您及彖人身体械、万事如意' 阂彖欢乐,祝福同学付财成长,,颜5取得好成灵为祖国奉献力*12-1 解:从快J 12-1的数据有: 加=4rn , 4・切廊,/ 1., 4 = 2, 4-39,y =11,UW \中央距Q 二兆加加,因此可以求得有关的几何尺寸如下:蜗轮的分度圆直径:% 二帽1 二 4x39 = 156 加加h =用=4mm , 欢送使用本资料,,版身体演、万事如意,阂彖欢乐.■同学们僮鼾夬乐的成长.早m 为祖国的崇荣昌.奉献自己的力*^ = 1,2m = 1.2 x4mm = 4.8mm4 =吨+2) =4xQ0+? =岖取幅给施囿吉区.1 " :1 । ■ M 内干匕"I 大I 贝I 曰L1T ♦ OJ '」 ' 、 『 那么!使用本金,祝悠身体®M 、声如意,g 陈庶同学们献|环的成长.…一 士 ii/i =- 2.4) = 4x(10 -2.4) = 30.4mm 蜗杆齿根圆直径:.■ 蜗轮齿根圆直径: *蜗杆轴向齿距和蜗轮端面齿距:蜗轮和蜗杆的齿顶高: 蜗轮和蜗杆的齿根高: 蜗杆齿顶圆直径:径向间隙:c=OJOM=OJOx4=Ota12-2图12.3解:〔1〕从图示看,这是一个左旋蜗杆,因此用右手握杆,四指“1 ,大拇指“】,可以得到从主视图上看,蜗轮顺时针旋转.〔见图12.3 〕〔2〕由题意,根据条件,可以得到蜗轮上的转矩为:=稼=彳眄/.x0.75 x50〔2«37JN*m蜗杆的圆周力与蜗轮的轴向力大小相等,方向相反,即:巧二咖N 蜗杆的轴向力与蜗轮的圆周力大小相等,方向相反,即:五“强产—375的心10斗3就加蜗杆的径向力与蜗轮的径向力大小相等,方向相反,即:其■耳广昂愀■犯Ox婚期7364国N 各力的方向如图12-3所示.T输出轴o12-3图12.4解:(1)先用箭头法标志出各轮的转向,如图12.5所示.由于锥齿轮轴向力指向大端,因此可以判断出蜗轮轴向力水平向右,从而判断出蜗杆的转向为顺时针,如图12.5所示.因此根据蜗轮和蜗杆的转向,用手握法可以判定蜗杆螺旋线为右旋.(2)各轮轴轴向力方向如图12.5所示.12-4 解:(1)根据材料确定许用应力.由于蜗杆选用如行,外表淬火,可估计蜗杆外表硬度.根据表12-4,= 200 MFts(2)选择蜗杆头数.4 = 2,那么传动比】二,四二闺」忖二川,查表12-2,选取z a =iz L = 18 x2 = 36(3 )确定蜗轮轴的转矩取,传动效率旷皿中9为加冏曲=9J5xltf xl2x7如和8(MW2xlQW•刖(4)确定模数和蜗杆分度圆直径按齿面接触强度计算礴 > X&022X103 =38686马瓦] 姒20『由表12-1查得a = 2,眼=5120,触加肌4 = Sta g = 10(5)确定中央距(6)确定几何尺寸蜗轮的分度圆直径: 蜗轮和蜗杆的齿顶高: 蜗轮和蜗杆的齿根高: 蜗杆齿顶圆直径: 蜗轮喉圆直径:, 蜗杆齿根圆直径:工二,工「犹『 蜗轮齿根圆直径:…二二了 蜗杆轴向齿距和蜗轮端面齿距: ::「:,「:「""一' ' '' ' "J"r = 0.20m = 0.20 x3 = l.jmm(7 )计算滑动速度吟% >rx80xl440 .Vi = ---- = ------------------ = 6.0288 m I s a =.,加(g +⑷=0 J x8© +3.=18物沏= mz a =8x36 = 283 m九二相■8神1h f = 1.2m=L2xta = 5)iod.=啕+2)=8x(10+2)=9fym径向间隙:60 x1000 60x10100E 2y = arctg^=雷cfg—= 11.30990q ID匕6.0288 , ,匕=—= --------- = 6」48M/scos/ cod 1,309?1加/5符合表12-4给出的使用滑动速度匕±(说明:此题答案不唯一,只要是按根本设计步骤,满足设计条件的答案,均算正确.)12-5解:一年根据300天计算,设每千瓦小时电价为a元.依题意损耗效率为因此用于损耗的费用为:& -a3皿x3 x8 x5fl = 100 00马x300 x24x" = 72口xl1元12-6解(i)重物上升加,卷筒转的圈数为:1快)」Q14xO2)-l,5g转;由于卷筒和蜗轮相联, 也即蜗轮转的圈数为L59圈;因此蜗杆转的转数为:1加建哂山9加1抵6转.(2)该蜗杆传动的蜗杆的导程角为:y ■ arctg—■: arctg—■ JJ104 30而当量摩擦角为,一':■5比拟可见7 >1,因此该机构能自锁.(3)手摇转臂做了输入功,等于输出功和摩擦损耗功二者之和.输出功小跪=撇xi = j咖焦耳;依题意此题摩擦损耗就是蜗轮蜗杆啮合损耗,因此啮合时的传动效率喻+用/.71.+1.乃那么输入功应为产加im =阈3.14焦耳.由于蜗杆转了63.6转,因此应有:乂=63 6犬2就即:二工;一二,)一可得:」「.「’•>' 一•〞•,图12.6d}=^]=10 x 42 = 420 mm 12-7解蜗轮的分度圆直径:4二网=1 0小用蜗轮和蜗杆的齿顶高:= 1.2m-1,2x10mm-12mm蜗轮和蜗杆的齿根高:蜗轮喉圆直径:4广税(4 + 2) = 1.x(42 +2)=440现用蜗杆齿根圆直径:於必-2MtM9-2耻66加蜗轮齿根圆直径:命=必-网=飒42-24)=3娴n蜗杆轴向齿距和蜗轮端面齿距:处二口广2 =^i=3.14xlO=3Lta 径向间隙:c=0 20m = 0.20 xlO = 2mm7蜗杆齿顶圆直径:4 产咆+今= 10x(9+2) = llta图 12.712-8解火=H ,取W 产1卿伽,歹= 0,8,那么那么油温f= %+Af=2.+42/=62,86℃,小于g 叱,满足使用要求. A" 1000 1000 x3xQ-调 a, 14x1- 42.86℃<[AJ]> 60 -70℃。
1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
取适当比例图尺,作出两次极限位置和(见图2.17 )。
由图量得:,。
解得:由已知和上步求解可知:,,,( 2 )因最小传动角位于曲柄与机架两次共线位置,因此取和代入公式( 2-3 )计算可得:或:代入公式( 2-3 )′,可知题 2-6解:因为本题属于设计题,只要步骤正确,答案不唯一。
这里给出基本的作图步骤,不给出具体数值答案。
作图步骤如下(见图 2.18 ):( 1 )求,;并确定比例尺。
( 2 )作,。
(即摇杆的两极限位置)( 3 )以为底作直角三角形,,。
( 4 )作的外接圆,在圆上取点即可。
在图上量取,和机架长度。
则曲柄长度,摇杆长度。
在得到具体各杆数据之后,代入公式( 2 — 3 )和( 2-3 )′求最小传动角,能满足即可。
图 2.18题 2-7图 2.19解 : 作图步骤如下(见图 2.19 ):( 1 )求,;并确定比例尺。
( 2 )作,顶角,。
( 3 )作的外接圆,则圆周上任一点都可能成为曲柄中心。
( 4 )作一水平线,于相距,交圆周于点。
( 5 )由图量得,。
解得:曲柄长度:连杆长度:题 2-8解 : 见图 2.20 ,作图步骤如下:( 1 )。
( 2 )取,选定,作和,。
( 3 )定另一机架位置:角平分线,。
( 4 ),。
杆即是曲柄,由图量得曲柄长度:题 2-9解:见图 2.21 ,作图步骤如下:( 1 )求,,由此可知该机构没有急回特性。
( 2 )选定比例尺,作,。
(即摇杆的两极限位置)( 3 )做,与交于点。
( 4 )在图上量取,和机架长度。
曲柄长度:连杆长度:题 2-10解 : 见图 2.22 。
这是已知两个活动铰链两对位置设计四杆机构,可以用圆心法。
连接,,作图 2.22 的中垂线与交于点。
然后连接,,作的中垂线与交于点。
图中画出了一个位置。
从图中量取各杆的长度,得到:,,题 2-11解 : ( 1 )以为中心,设连架杆长度为,根据作出,,。
( 2 )取连杆长度,以,,为圆心,作弧。
( 3 )另作以点为中心,、,的另一连架杆的几个位置,并作出不同半径的许多同心圆弧。
( 4 )进行试凑,最后得到结果如下:,,,。
机构运动简图如图 2.23 。
题 2-12解 : 将已知条件代入公式( 2-10 )可得到方程组:联立求解得到:,,。
将该解代入公式( 2-8 )求解得到:,,,。
又因为实际,因此每个杆件应放大的比例尺为:,故每个杆件的实际长度是:,,,。
题 2-13证明 : 见图 2.25 。
在上任取一点,下面求证点的运动轨迹为一椭圆。
见图可知点将分为两部分,其中,。
又由图可知,,二式平方相加得可见点的运动轨迹为一椭圆。
3-1解图 3.10 题3-1解图如图 3.10所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过B点作偏距圆的下切线,此线为凸轮与从动件在B点接触时,导路的方向线。
推程运动角如图所示。
3-2解图 3.12 题3-2解图如图 3.12所示,以O为圆心作圆并与导路相切,此即为偏距圆。
过D点作偏距圆的下切线,此线为凸轮与从动件在D点接触时,导路的方向线。
凸轮与从动件在D点接触时的压力角如图所示。
3-3解:从动件在推程及回程段运动规律的位移、速度以及加速度方程分别为:( 1)推程:0°≤ ≤ 150°( 2)回程:等加速段0°≤ ≤60 °等减速段60°≤ ≤120 °为了计算从动件速度和加速度,设。
计算各分点的位移、速度以及加速度值如下:总转角0° 15° 30° 45° 60° 75° 90° 105°位移 (mm) 00.734 2.865 6.183 10.365 15 19.635 23.817 速度0 19.416 36.931 50.832 59.757 62.832 59.757 50.832(mm/s)加速度65.797 62.577 53.231 38.675 20.333 0 -20.333 -38.675(mm/s2 )总转角120° 135° 150° 165° 180° 195° 210° 225° 位移 (mm) 27.135 29.266 30 30 30 29.066 26.250 21.563速度36.932 19.416 0 0 0 -25 -50 -75(mm/s)加速度-53.231 -62.577 -65.797 0 -83.333 -83.333 -83.333 -83.333 (mm/s2 )加速度(mm/s-83.333 -83.333 83.333 83.333 83.333 0 0 02 )根据上表作图如下(注:为了图形大小协调,将位移曲线沿纵轴放大了 5倍。
):图 3-13 题3-3解图3-4 解:图 3-14 题3-4图根据 3-3题解作图如图3-15所示。
根据(3.1)式可知,取最大,同时s 2 取最小时,凸轮机构的压力角最大。
从图3-15可知,这点可能在推程段的开始处或在推程的中点处。
由图量得在推程的开始处凸轮机构的压力角最大,此时<[ ]=30° 。
图 3-15 题3-4解图3-5解:( 1)计算从动件的位移并对凸轮转角求导当凸轮转角在0≤ ≤ 过程中,从动件按简谐运动规律上升 h=30mm。
根据教材(3-7)式可得:0≤ ≤0≤ ≤当凸轮转角在≤ ≤ 过程中,从动件远休。
S 2 =50 ≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件按等加速度运动规律下降到升程的一半。
根据教材(3-5)式可得:≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件按等减速度运动规律下降到起始位置。
根据教材(3-6)式可得:≤ ≤≤ ≤当凸轮转角在≤ ≤ 过程中,从动件近休。
S 2 =50 ≤ ≤≤ ≤( 2)计算凸轮的理论轮廓和实际轮廓本题的计算简图及坐标系如图 3-16所示,由图可知,凸轮理论轮廓上B点(即滚子中心)的直角坐标为图 3-16式中。
由图 3-16可知,凸轮实际轮廓的方程即B ′ 点的坐标方程式为因为所以故由上述公式可得理论轮廓曲线和实际轮廓的直角坐标,计算结果如下表,凸轮廓线如图3-17所示。
x′ y′ x′ y′0° 49.301 8.333 180° -79.223 -8.88510° 47.421 16.843 190° -76.070 -22.42120° 44.668 25.185 200° -69.858 -34.84030° 40.943 33.381 210° -60.965 -45.36940° 36.089 41.370 220° -49.964 -53.35650° 29.934 48.985 230° -37.588 -58.31260° 22.347 55.943 240° -24.684 -59.94970° 13.284 61.868 250° -12.409 -59.00280° 2.829 66.326 260° -1.394 -56.56690° -8.778 68.871 270° 8.392 -53.041100° -21.139 69.110 280° 17.074 -48.740110° -33.714 66.760 290° 24.833 -43.870120° -45.862 61.695 300° 31.867 -38.529130° -56.895 53.985 310° 38.074 -32.410140° -66.151 43.904 320° 43.123 -25.306150° -73.052 31.917 330° 46.862 -17.433160° -77.484 18.746 340° 49.178 -9.031170° -79.562 5.007 350° 49.999 -0.354180° -79.223 -8.885 360° 49.301 8.333图 3-17 题3-5解图3-6 解:图 3-18 题3-6图从动件在推程及回程段运动规律的角位移方程为:1.推程:0°≤ ≤ 150°2.回程:0°≤ ≤120 °总转角0 15 30 45 60 75 90 105(°)角位移0 0.367 1.432 3.092 5.182 7.5 9.818 11.908(°)总转角120 135 150 165 180 195 210 225 (°)总转角240 255 270 285 300 315 330 345 (°)角位移7.5 4.630 2.197 0.571 0 0 0 0(°)根据上表作图如下:图 3-19 题3-6解图3-7解:从动件在推程及回程段运动规律的位移方程为:1.推程:0°≤ ≤ 120°2.回程:0°≤ ≤120 °计算各分点的位移值如下:总转角0153045607590105(°)位移( mm)00.761 2.9296.1731013.82717.07119.239总转角120135150165180195210225(°)位移( mm ) 20 20 20 19.239 17.071 13.827 106.173 总转角( °)240 255270285 300 315 330 345 位移( mm ) 2.9290.761 0图 3-20 题3-7解图4.5课后习题详解4-1解 分度圆直径齿顶高齿根高顶 隙中心距齿顶圆直径齿根圆直径基圆直径齿距齿厚、齿槽宽4-2解由可得模数分度圆直径4-3解由得4-4解分度圆半径分度圆上渐开线齿廓的曲率半径分度圆上渐开线齿廓的压力角基圆半径基圆上渐开线齿廓的曲率半径为 0;压力角为。