离散系统的基本概念
- 格式:ppt
- 大小:841.50 KB
- 文档页数:22


连续系统与离散系统的概念连续系统和离散系统是系统控制理论中两种基本的模型类型。
连续系统是指系统的输入和输出信号是连续变化的,并且系统的状态可以在任意时间点进行测量和控制。
而离散系统则是指系统的输入和输出信号是离散的,即只在离散的时刻进行测量和控制,而在两个离散时刻之间的信号变化是未知的。
首先,我们来详细介绍连续系统。
连续系统可以用微分方程来描述,通常采用微分方程的求解方法来求得系统的时域响应。
连续系统可以是线性的,也可以是非线性的。
线性连续系统的特点是具有叠加性质,即输入的线性组合对应于输出的线性组合。
而非线性连续系统则是具有非线性性质,输入的线性组合对应于输出的非线性组合。
连续系统的状态可以通过求解微分方程来得到,并且可以通过选择系统的控制输入来实现对系统状态的调节。
在连续系统中,我们可以利用传递函数来描述系统的频域特性,传递函数是输入和输出的拉普拉斯变换的比值。
传递函数可以用来分析系统的稳定性、频率响应、阻尼特性等。
接下来,我们来介绍离散系统。
离散系统可以用差分方程来描述,通过求解差分方程可以得到系统的时域响应。
离散系统也可以是线性的或非线性的,线性离散系统满足叠加性质,非线性离散系统则不满足叠加性质。
离散系统的状态可以通过迭代差分方程来得到,并且可以通过选择系统的控制输入来实现对系统状态的调节。
离散系统的频域特性可以用离散时间傅里叶变换(DTFT)或离散傅里叶变换(DFT)来描述,这些变换可以将系统的输入和输出信号从时域转换到频域。
离散系统的稳定性、频率响应等也可以通过这些变换来进行分析。
在实际应用中,连续系统和离散系统都有各自的优缺点。
连续系统具有高精度和高灵敏度的特点,适用于需要高精度控制和测量的应用,如机器人控制、飞行器导航等。
而离散系统则具有较低的复杂度和较好的实时性,适合于计算机控制、数字信号处理等应用。
此外,由于实际系统中往往存在传感器采样和控制执行的离散性,所以很多情况下需要将连续系统进行离散化,从而使用离散系统进行建模和控制。

离散控制的基本概念和原理离散控制是自动控制中常见的一种控制方式,它利用了离散信号来实现对系统的控制和调节。
在离散控制中,信号和变量的取值是有限离散的,而不是连续变化的。
本文将介绍离散控制的基本概念和原理。
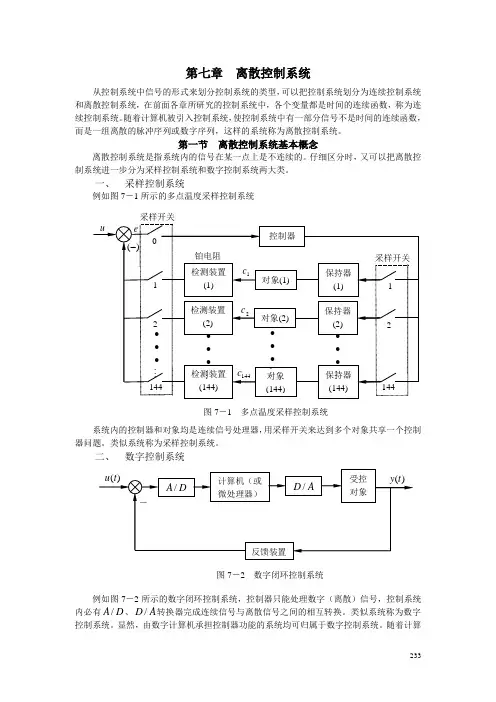
一、离散控制的基本概念离散系统:离散控制的对象一般为离散系统。
离散系统是对离散信号进行处理的系统,它的输入、输出和状态变量的取值都是离散的。
采样:采样是将连续信号在时间上进行离散化的过程,通过周期性地在一定的时间间隔内对信号进行采样,得到离散信号。
量化:量化是将连续信号在幅度上进行离散化的过程,将连续信号的幅度划分为有限个离散值,得到离散信号。
离散化:离散化是将连续系统在时间和幅度两个维度上进行离散化的过程,通过采样和量化,将连续系统转化为离散系统。
二、离散控制的原理1. 采样控制原理离散控制系统的基本思想是通过采样信号来获得系统当前的状态,然后根据采样信号计算出控制量,并输出到执行机构,对系统进行调节。
在采样控制中,有两个重要的参数:采样周期和采样速率。
采样周期:采样周期是每次对连续信号进行采样的时间间隔,它决定了系统对变化的灵敏性。
较小的采样周期可以提高系统的响应速度,但也会增加计算量和噪声干扰。
采样速率:采样速率是指每秒钟采样信号的次数,它决定了采样系统对信号变化的能力。
较高的采样速率可以更准确地还原连续信号,但也会增加系统的复杂度和成本。
2. 量化控制原理离散信号的幅度是通过量化来表示的,量化控制原理就是通过将连续信号的幅度划分为有限个离散值,将控制量转化为离散信号。
量化精度:量化精度是指离散信号幅值划分的细度,也称为量化位数。
量化精度越高,离散信号越接近连续信号。
但高精度的量化也会增加计算和存储的复杂度。
量化误差:量化过程中会引入量化误差,即实际值与量化值之间的差距。
量化误差会对系统的控制精度产生影响,因此需要根据控制要求选择适当的量化精度。
三、离散控制的应用离散控制广泛应用于工业自动化、机器人控制、生物医学工程等领域。
离散系统的传递函数1. 介绍在控制理论中,离散系统的传递函数是描述系统输入与输出之间关系的一种数学工具。
它能够用来描述离散时间系统的动态特性和稳定性,并且可以用于设计和分析离散控制系统。
2. 离散系统的基本概念在理解离散系统的传递函数之前,我们需要先了解一些与离散系统相关的基本概念。
2.1 离散信号离散信号是在离散时间点上定义的信号。
它与连续信号相对,连续信号是在连续时间上定义的信号。
在离散系统中,输入和输出信号往往是离散信号。
2.2 离散时间系统离散时间系统是指输入和输出信号都在离散时间点上进行采样的系统。
离散时间系统可以用差分方程来描述。
2.3 传递函数传递函数是用来描述系统输入与输出之间关系的一种函数。
对于连续时间系统,传递函数通常用拉普拉斯变换来表示。
而对于离散时间系统,传递函数则用Z变换来表示。
3. 离散系统的传递函数离散系统的传递函数是用Z变换来表示系统输入与输出之间关系的函数。
它可以以分数形式表示,也可以以多项式形式表示。
3.1 分数形式的传递函数分数形式的传递函数是用分数多项式表示的。
分子多项式表示系统的输出与输入之间的关系,分母多项式表示系统零点和极点的位置。
3.2 多项式形式的传递函数多项式形式的传递函数是用多项式系数表示的。
这种表示方式更加直观,能够清晰地看出系统的动态特性。
4. 离散系统的稳定性离散系统的稳定性是指系统在输入信号有界的情况下,输出信号是否有界。
在离散系统中,判断稳定性可以通过传递函数的零点和极点来进行。
4.1 零点和极点的关系离散系统的稳定性与传递函数的零点和极点之间存在关系。
如果一个离散系统的零点都在单位圆内,极点都在单位圆外,那么该系统是稳定的。
4.2 稳定性的判断方法根据离散系统的传递函数,我们可以通过以下方法来判断系统的稳定性: 1. 判断传递函数的极点是否在单位圆内。
2. 判断传递函数的零点是否在单位圆内。
如果传递函数的极点都在单位圆内,零点都在单位圆外,则系统是稳定的;反之,如果存在极点在单位圆外或者零点在单位圆内,系统是不稳定的。