ADS-B综合课程设计报告
- 格式:doc
- 大小:175.18 KB
- 文档页数:14
S模式ADS-B接收机解码板的研究及实现的开题报告一、研究背景当前,无人机技术飞速发展,成为最具前景和发展的高科技领域之一。
其中,ADS-B技术是无人机避障、协同飞行和空中交通管制等场景中不可或缺的一种技术。
S模式ADS-B(1090ES)能够实现更高的数据传输速率和更远的传输距离,因此得到越来越多无人机厂商和用户的关注。
然而,实现S模式ADS-B接收需要进行相关硬件和软件的研发。
目前,市面上的ADS-B接收器普遍存在数据更新慢、过滤不精准等问题。
在这种情况下,开发一种性能优越的S模式ADS-B接收机解码板,具有重要的理论研究和应用价值。
二、研究目的本课题旨在实现一种高性能、实用、低成本的S模式ADS-B接收机解码板,解决现有ADS-B接收器的性能瓶颈,提升数据传输速率和过滤精度。
具体研究目标为:1.设计并实现S模式ADS-B数据接收硬件电路,实现数据的硬件解码;2.设计并实现软件解码器,实现数据的过滤、解码和显示;3.通过实验验证硬件电路和软件解码器的性能指标,并进行性能分析和对比实验;4.探索S模式ADS-B解码板在无人机避障、协同飞行和空中交通管制等场景中的应用。
三、研究内容1.硬件电路的设计与实现通过对ADS-B信号的理解和分析,设计一种硬件电路,实现S模式ADS-B信号的接收、放大和解调。
硬件电路主要包括射频前端、局部振荡器、中频输入电路、中频处理电路、数据同步电路等部分。
硬件电路采用工业级射频模块和集成电路,保证接收精度和稳定性。
2.软件解码器的设计与实现经过硬件电路解调后,接收到的数据需要进行进一步的过滤、解码和显示。
设计一个软件解码器,实现ADS-B数据的解码和显示,同时实现数据的格式化输出和保存。
解码器采用C++语言进行设计,通过接口和数据结构化的方式,实现多种数据格式的解析和显示,为后续数据分析和应用提供原始数据支持。
3.实验设计与性能验证通过实验,对设计的硬件电路和软件解码器进行性能测试和验证。
沈阳航空航天大学综合课程设计ADS-B报文数据的解析研究班级学号学生姓名指导教师课程设计任务书课程设计的内容及要求:一、设计说明对接收到的ADS-B数据进行解析,就是要对航空报文有较多了解,根据编码协议对报文进行解码,从里面提取出有用信息,能让人直观理解报文信息二、设计要求根据链路协议及编码协议,对报文解析,要实现:1.能够解析出速度,高度,经纬度等重要信息;2.界面尽量友好,误差要小;3.数据能够实时更新三、实验要求用VC++实现编程和解析四、推荐参考资料五、按照要求撰写课程设计报告成绩评定表一、概述空中交通管理的根本目的是使航线上的飞机安全、有效和有计划地在空域中飞行, 管制员需要对管制空域内飞机的飞行动态进行实时监视。
传统的雷达监视手段采用询问/ 应答方式对目标探测。
从长远来看, 雷达系统自身具有很多局限性: 雷达波束的直线传播形成了大量雷达盲区; 无法覆盖海洋和荒漠等地区; 雷达旋转周期限制了数据更新率的提高, 从而限制了监视精度的提高; 无法获得飞机的计划航路、速度等态势数据, 限制了跟踪精度的提高和短期冲突告警STCA ( Short TermConflict Alert ) 的能力。
因此, 需要发展新的监视手段。
广播式自动相关监视ADS- B( Automatic DependentSurveillance- Broadcast ) 即航空器自动广播由机载星基导航和定位系统生成的精确定位信息, 地面设备和其他航空器通过航空数据链接收此信息, 卫星系统、飞机以及地基系统通过高速数据链进行空天地一体化协同监视。
ADS- B 的精度和数据更新率比雷达高, 除位置信息外,ADS- B 还提供其他信息, 包括速度和飞行意向等, 尤其适合于山区、荒漠、边远机场等不宜建设雷达的区域, 也适合于高密度机场的监视, 是未来监视系统的重要组成部分和发展方向。
目前,ICAO(International Civil Aviation Organization,国际民用航空组织)高度重视ADS‐B 的发展与应用,并制订了相关的技术标准和发展规划,并一直在努力倡导在全球统一部署相同标准 ADS‐B 体系,实现全球范围内的飞行监控与数据共享。
ADS-B技术分析和应用ADS-B技术(Automatic Dependent Surveillance-Broadcast)是一种航空领域的先进技术,它被广泛应用于航空监控和飞行安全领域。
本文将对ADS-B技术进行详细分析,并探讨其在航空领域的应用。
1. ADS-B技术概述ADS-B技术是一种基于GPS导航系统的航空监控技术,它通过航空器上安装的ADS-B发射器向地面和其他飞行器发送飞行信息,包括位置、速度、高度等数据。
这些数据可以被地面监控站和其他飞行器接收,并用于飞行监控、空中交通管理和飞行安全等用途。
相比传统的雷达监控技术,ADS-B技术具有更高的精度和实时性,能够提高空中交通的安全性和效率。
相比传统的雷达监控技术,ADS-B技术具有许多优势。
ADS-B技术具有更高的精度和实时性,能够提供更准确、更新更快的飞行数据,有助于提高空中交通管理的效率。
ADS-B技术能够实现飞行器之间的信息共享,通过广播式的数据传输方式,让所有飞行器都能够获取到实时的飞行信息,从而避免了传统雷达监控中的“盲区”和“暗区”,提高了飞行安全性。
ADS-B技术还具有更广泛的应用范围,不仅可以用于民航飞行监控,还可以应用于通用航空、军用航空等领域,具有更大的市场潜力。
ADS-B技术已经在全球范围内得到了广泛的应用,包括民航、通用航空和军用航空等领域。
在民航领域,许多国家已经要求所有飞行器必须安装ADS-B设备,以便提高空中交通管理的效率和飞行安全性。
在通用航空领域,ADS-B技术也被越来越多地应用于小型飞行器和私人飞机上,为这些飞行器提供更好的飞行监控和安全保障。
在军用领域,ADS-B技术也被广泛应用于军用飞行器和军事航空基地,为军事航空活动提供了更先进的监控手段。
随着航空技术的不断进步,ADS-B技术也将不断发展和完善。
未来,ADS-B技术有望实现更高的精度和更广的覆盖范围,能够应对更多样化的空中交通管理需求。
ADS-B技术也将更多地与其他航空技术相结合,如自动驾驶技术、无人机技术等,共同推动航空领域的发展。
ADS-B技术分析和应用ADS-B技术(自动相关监视广播)是一种利用卫星导航和蜂窝通信技术进行无线飞行器位置报告和监视的技术。
它可以提高航空交通管理系统的效率和安全性,同时也为飞行员提供更好的情景感知。
本文将就ADS-B技术进行深入分析,并探讨其在航空领域的应用。
一、ADS-B技术原理和关键组成ADS-B技术通过飞行器上的设备向其他飞行器和地面站发射定位和飞行状态信息,从而实现飞行器位置报告和监视。
其关键组成包括ADS-B发射器、ADS-B接收器、相关设备和地面站。
1. ADS-B发射器:它是飞行器上的设备,能够获取飞行器的位置、速度、高度等信息,并通过蜂窝通信网络发送给其他飞行器和地面站。
3. 相关设备:包括卫星导航设备、蜂窝通信设备等,用于支持ADS-B技术的实施和运行。
4. 地面站:用于接收和处理ADS-B信息,提供实时监视和报告服务,支持航空交通管理系统的运行。
二、ADS-B技术特点和优势ADS-B技术具有多种特点和优势,使其成为航空领域的重要技术之一。
1. 实时性:ADS-B技术能够提供飞行器位置和状态的实时信息,为空中交通管理系统提供更准确的情景感知。
2. 自动化:ADS-B技术能够实现自动监视和报告,大大减轻了空中交通管制员的工作负担,提高了系统的效率和可靠性。
3. 全球性:ADS-B技术依赖卫星导航和蜂窝通信技术,能够覆盖全球范围,为航空领域提供统一的监视和报告服务。
4. 双向通信:ADS-B技术支持飞行器之间的双向通信,能够提供更多的信息交换和决策支持,有助于避免空中碰撞和提高飞行安全性。
5. 可靠性:ADS-B技术的设备和技术成熟度较高,能够提供稳定可靠的服务,为航空领域提供了重要的技术支持。
三、ADS-B技术在航空领域的应用ADS-B技术在航空领域有着广泛的应用,涉及到空中交通管理、飞行安全、飞行员决策支持等多个方面。
3. 飞行员决策支持:ADS-B技术能够通过蜂窝通信网络将实时信息发送给飞行员,为其提供更好的情景感知和决策支持,帮助其做出适当的飞行决策。
adsb方案Ads-B方案随着航空业的不断发展和技术的日新月异,航空安全和航班效率成为热门话题。
在这方面,ADS-B(Automatic Dependent Surveillance-Broadcast,自动依赖监视广播)方案被广泛提及和采用。
本文将介绍ADS-B方案的工作原理、优势和应用,并探讨其在航空领域的未来发展。
一、工作原理ADS-B方案是一种航空交通管理系统,通过航空器上搭载的发射天线和地面接收设备,实现对航空器的准确监视和空中交流。
它基于GPS技术定位航空器的准确位置和速度,并广播这些信息给其他航空器和地面站,实时更新航空器的动态状态。
这种监视和广播机制可以提高空中交通管理的效率,减少空中碰撞和意外事件的发生。
二、优势1. 提高空中交通安全:ADS-B方案提供了更准确和及时的航空器位置信息,减少了空中交叉飞行和碰撞的风险。
航空器之间可以通过ADS-B数据交换避免冲突,增加交通管制员的决策支持和应对能力。
2. 提升航班效率:ADS-B方案使得航空器在空中和地面上的运行更加精确和高效。
通过准确的位置和速度信息,航空器可以更好地遵循航线,进行优化的飞行计划,减少航程时间和燃料消耗。
3. 开放源码和标准化:ADS-B方案采用开放源码和标准化的技术,使得航空安全设备之间的互联互通成为可能。
这种开放性可以促进技术创新和设备之间的兼容性,使得ADS-B方案具备更广泛的适用性和可扩展性。
三、应用1. 空中交通管理:ADS-B方案在空中交通管理领域得到广泛应用。
各个国家和地区的航空交通管理局可以通过建设地面接收站和开发相应的监控软件,实时监控航空器的位置和状态。
2. 航空器运行:航空器可以通过ADS-B方案获取周围航空器的信息,并进行相应的应对措施。
这不仅可以提高飞行安全,还可以优化飞行计划,减少延误和燃料消耗。
3. 航空器维护:ADS-B方案可以提供航空器运行状况和性能参数的实时数据。
维修人员可以根据这些数据进行故障诊断和预防性维护,减少航空器的维修成本和停机时间。
ADS-B教学实验方案引言ADS-B教学系统是为了让学生学习ADS-B原理、ADS-B系统组成、ADS-B信号处理技术。
可以通过ADS-B教学系统进一步研究分析ADS-B位置的精度、准确性、稳定性、实时性,设计基于ADS-B的空中碰撞告警系统,混合空域的空中交通管理系统(UTM)设计。
也可以研究ADS-B报文解析、设计显示终端、基于ADS-B的广域多点定位系统开发。
系统可以在教室内演示空中二次雷达A,C/S模式和ADS-B的模拟信号发射,地面的信号接收、解析、显示。
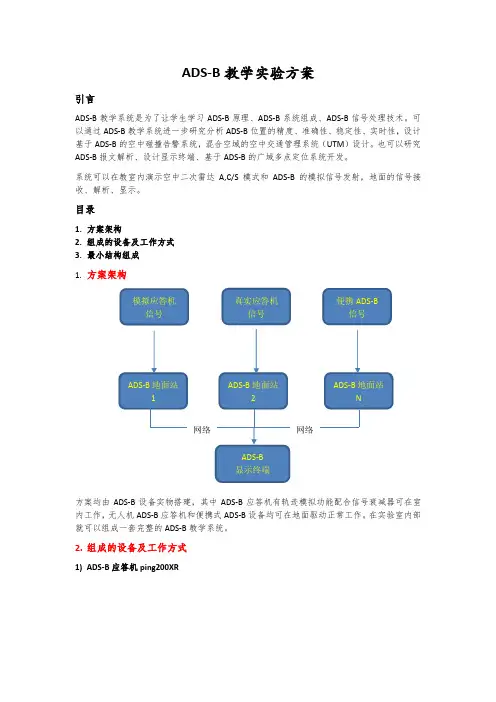
目录1.方案架构2.组成的设备及工作方式3.最小结构组成1.方案架构方案均由ADS-B设备实物搭建,其中ADS-B应答机有轨迹模拟功能配合信号衰减器可在室内工作,无人机ADS-B应答机和便携式ADS-B设备均可在地面驱动正常工作。
在实验室内部就可以组成一套完整的ADS-B教学系统。
2.组成的设备及工作方式1)ADS-B应答机ping200XRping200XR是一款全功率(250W)应答机,支持A,C/S应答和ADS-B广播。
集成GPS和气压高度计,通过上位机软件配置ICAO地址、呼号、应答机编码身份信息和模拟飞行轨迹,配合天线衰减器在室内工作不会造成信号干扰。
教学场景模拟示例:✧飞机空中遇险应答机挂遇险代码7600、7700。
✧多台应答机模拟飞机空中碰撞的场景,从而研究ADS-B空中避撞告警算法。
✧模拟民航飞机、通用飞机、无人机的混合空域飞行,研究混合空域空中交通管理方法和无人机空中交通管理 UTM)。
2)便携式ADS-B收发机SkyEcho2SkyEcho2是一款自带电池的ADS-B收发机,发射模式为DF-18,发射功率20W。
应用于没有ADS-B的通航飞机和轻型运动型飞机,在国内已有数十家通航公司选用。
设备在英国获得CAA 的批准使用。
SkyEcho2具有ADS-B接收功能,可以与多款电子飞行包软件兼容实现飞行员掌握空中交通情况。

• 152•一种ADS-B地面站自动测试系统的设计与实现四川九洲空管科技有限责任公司 段 煜 海 灏【摘要】由于ADS-B信号及地面站的复杂性,ADS-B地面站的系统级功能性能测试工作量大,测试环境搭建和测试用例的设计较为复杂,手动难以高效的开展测试工作。
本文介绍了一种ADS-B地面站自动化测试系统,从测试原理、设计思路以及实现三个方面详细描述了测试系统的从需求分析到设计实现的过程。
【关键词】空中交通管制;监视;ADS-B;地面站;1090MHz ES;自动测试系统1.概述新航行系统是一个以卫星全球通信、导航、监视加上自动化的空中交通管理的系统,其中监视系统新增的技术手段有自动相关监视(ADS )技术手段,并计划在空中交通管理领域普遍使用。
ADS-B (Automatic Dependent Surveillance–Broadcast )即广播式自动相关监视技术,是自动相关监视中的重要组成部分。
“自动”即不需要飞行员或外部驱动,“相关”即数据来源于飞机导航系统的。
飞行器通过卫星导航确定其位置信息(经纬度、几何高度),结合飞行器自身的信息(S 模式地址、航班号、发射机类型、大气压高度、模式A 代码、飞机运行状态等)组成不同类型的报文,对空间进行周期广播,空中交通管制地面站或机载端可以接收这些信息,从而对飞行器进行监视。
ADS-B 从信号物理链路来说分为两种技术体制:1)UAT (universal access transceiver ),即通用访问收发机,是一种数据链通信技术,主要用于通用航空领域。
2)1090MHz ES (extended squitter ),即1090兆赫扩展断续振荡器,是与扩展型S 模式信号格式一致的数据链通信技术,主要用于军民航领域。
ADS-B 从功能上分为OUT 和IN 两种功能:1)ADS-B OUT 功能是飞行器实时周期广播本机相关信息,物理载体为机载端设备。
ADS-B技术分析和应用
ADS-B(自动侦测广播)技术是一项用于飞行和飞行管理的无线电通信技术,用于自动向空中交通管制单位和飞行操纵员报告飞机位置。
它是一种以处理透明和高效的航行数据传输为目标的航空电子技术,其发展着眼于改善两个主要方面:提高大范围航行数据和安全。
ADS-B技术的基本原理是,它能够自动将射频信号发射出去,被空中监视器接收并记录,从而收集飞机的数据,包括位置、高度、航线等信息,有助于飞行更加安全、高效。
此外,它还可以为飞行员提供有效的实时的位置信息,以便他们可以更好地控制飞机的运行,减少偏离航线的可能性。
ADS-B技术在管制和飞行中可以大幅度改善航空安全和航行系统的性能。
它可以使管制员拥有更多的实时数据,可以更快地解决复杂的管制问题,减少延误,给飞行员提供准确的信息,从而提高多重任务环境中的能力。
此外,ADS-B技术在航空交通管制系统方面也有许多应用。
如使用ADS-B技术设计的无人机系统,可以实现低空空中轨迹监控,无需使用铁路和地面导航系统;使用ADS-B技术,通过航空管制单位共享的数据,可以实现飞行飞机状态的实时监控和诊断,从而实现安全、可靠的航空交通管制。
总之,ADS-B技术是一种全新而重要的航空技术。
它可以改善航空安全,为空中交通管理带来可靠、全面的数据,同时也可以提高飞行员的工作效率和安全,是未来航空领域的一大发展方向。
ADS_B实验学院航空航天学院专业电子与通信工程学号姓名指导教师陈华伟小组成员ADS_B实验地面设备接收——运用信标机一、实验目的:1)了解ADS-B监视系统功能、设备安装等基本要求;2)掌握ADS-B监视系统工作原理、工作流程;3)了解民航标准ADS-B报文数据格式;4)掌握ADS-B报文解析数据内容,解析原理。
二、实验原理:ADS-B OUT是指航空器发送其位置信息和其他信息。
机载发射机以一定的周期发送航空器的各种信息,包括:航空器识别信息(ID)、位置、高度、速度、方向和爬升率等。
OUT是机载ADS-B设备的基本功能。
ADS-B发送的航空器水平位置一般源于GNSS系统,高度源于气压高度表。
地面系统通过接收机载设备发送的ADS-B OUT信息,监视空中交通状况,起到类似于雷达的作用。
ADS-B信标机主要是完成对ADS-B地面站的标校与测试,其功能如下a) 能够发射1090ES的ADS-B(DF18)报文;b) 能够正确地编码设置的如航班号,飞行高度,识别码,飞行速度等信息;ADS-B信标机主要由天线单元、发射模块、终端模块、电源模块组成。
通过通信接口(RS422)设置到信标机内部的参数(如飞机航班号、飞机的GPS位置、飞机地址、飞机高度、飞行速度等),按S模式数据格式18号报文打包,通过发射模块将编码后的信息发射出去。
再由ADS-B地面站接收并解码出报文信息,并与预设的各种参数进行对比,如果解码出的信息与设置到ADS-B信标机中的参数相同,则ADS-B信标机与ADS-B地面站都工作正常;否则,有故障发生。
如此,便可达到检测ADS-B接收机工作状态的目的。
ADS-B模拟系统,支持1090 ES协议,具有接收S模式的DF17、DF18报文能力;实时接收、处理并输出模式A/C/S、ADS-B信息,包括24-bit飞机地址、UTC时间信息(基于GPS)、信号强度、S模式下行报文、高度信息、位置信息、水平和垂直速度信息、最近位置修正时间信息、飞机ID、飞机种类、Squitter 种类、应答机能力、紧急和告警信息等;具有ASTERIX CAT 21数据输出接口;显示终端具有动态航迹显示功能。
ADSB方案简介Automatic Dependent Surveillance–Broadcast(ADS-B)是一种航空交通管理(ATM)技术,通过航空器上的广播传输自身位置和其他相关信息,实现飞机间的自动无线电通信,提高空中交通的安全性和效率。
ADS-B方案主要包括以下几个核心部分:1.ADS-B设备:在飞机上安装的设备,用于获取并广播飞机的位置、速度和其他相关信息。
2.ADS-B接收站:地面或航空器上的设备,用于接收ADS-B广播的航空器信息。
3.ADS-B地面站:地面上的设备,用于处理接收到的ADS-B数据,并将其转发给空中交通管理部门。
4.空中交通管理系统:通过接收ADS-B数据,并结合其他飞机和地面雷达数据,进行空中交通的监控和管理。
ADS-B设备ADS-B设备是ADS-B方案的核心组件之一,每架使用ADS-B技术的飞机都需要安装这样的设备。
ADS-B设备通常包括以下几个部分:1.GPS接收器:用于确定飞机的位置、速度和航向。
2.数据链广播发射机:将飞机的位置和其他信息编码成ADS-B消息,并通过无线电信号广播出去。
3.天线:用于发送和接收ADS-B消息。
ADS-B设备内置的GPS接收器能够高精度地测量飞机的位置和速度,而数据链广播发射机会将这些信息编码成ADS-B消息,并以每秒钟1次的频率进行广播。
ADS-B接收站ADS-B接收站是一种接收ADS-B广播信号的设备。
这些设备通常安装在地面站、航空器或其他固定位置。
ADS-B接收站的主要功能是接收飞机广播的ADS-B消息,并提取出其中的位置、速度和其他相关信息。
ADS-B接收站通常由以下几个部分组成:1.外置天线:用于接收飞机广播的ADS-B信号。
2.接收机:接收ADS-B信号并进行解调和解码,提取出ADS-B消息。
3.数据处理系统:将ADS-B消息转化为可读的数据,并将其存储或转发给ADS-B地面站或其他设备。
ADS-B接收站的位置选择非常重要,理想情况下应该选择在开阔的区域,以获得最佳的信号接收能力。
收稿日期:2020-03-09作者简介:吴小丹(1984—),男,贵州六盘水人,通信工程硕士,工程师,研究方向:数据收集载荷的融合技术,航空监视技术等。
图1 ADS-B系统工作原理框图0 引言ADS-B的全称是广播式自动相关(Automatic Dependent Surveillance Broadcast,ADS-B),是无线电技术在航空监视上的新应用,即基于GPS等导航卫星定位和空地、空空数据链的航空器运行监视系统。
作为一种在空管监视领域被正式采用的新技术,与传统的地面雷达系统相比,ADS-B系统能跳过传统航空监视领域的应答步骤,提供更加实时和准确的航空器身份信息和三维位置信息,增加对偏远地区如森林、远海、沙漠的监视范围,同时减少有雷达区域对雷达多重覆盖的需求。
ADS-B还可通过TIS-B和FIS-B应用程序提供交通和官方生成的图形天气、地形、空域限制等飞行信息,并向其它装载了ADS-B设备的飞机提供本飞机的位置和速度方向等信息,提高机组的空域情景意识,增强飞机的安全性,并可用于航空公司的运行监控和管理,为高效、安全地飞行奠定基础。
因此,国际民航组织(International Civil Aviation Organization,ICAO)确定将其作为未来场面和空中监视系统的主流技术。
由于所有装配ADS-B系统的飞机随机、自动、周期性的广播ADS-B信号,本文研究的ADS-B空间信息系统,旨在利用卫星平台的高空优势实现对飞机飞行状态进行大范围的、近实时的连续跟踪与监视,尤其是对地面空管系统覆盖的薄弱地区,如大洋、北极、沙漠和地面系统投资费用高的偏远山区等空域进行全天候监视,大大提高飞机的飞行安全、飞行效率和空域利用率。
1 ADS-B空间信息采集系统的原理ADS-B的工作原理如图1所示。
首先机载ADS-B设备收集本机GNSS设备产生的定位信号(如GPS信号),对飞机进行实时定位,然后综合机身上搭载的惯性陀螺仪、高度计等设备产生的飞行相关信息,把本机身份、位置、高度、速度、航迹(爬升率、飞行方向)等数据组装后以一定的时间间隔向外广播,这样飞机和地面基站可同时看到空域内其它飞机的方位与状态,更好的对航线内飞机的间隔和密度进行规划,从而有效提高机组的空中交通情景意识,使飞行任务更加安全与高效。
广播式自动相关监视ADS-B(AutomaticDependentSurveillance-Broadcast)采用全向广播方式,主要采用空对空报告,供空对空自我相互监视,起到了延伸驾驶员“肉眼视程”的作用,有利于实施“见到后避让”原则。
近年来,国外多次试验表明其对运输航空及通用航空都非常有效,故受到国际民航界的大力追捧,成为近期西方各国大力发展ADS-B的动力源泉,发展势头令人瞩目。
美国FAA认为,ADS-B将是实施自由飞行的奠基石。
虽然,欧洲并不提倡前景遥远、偏于理想、概念上较为模糊的“自由飞行”,但提出了“自由航路”概念,而ADS-B将会成为促进实施自由航路的主要可行手段之一。
一、现行ADS-B的功能特点广播式自动相关监视ADS-B采用全向广播方式播发空对空、空对地报告,由飞机自动向周围的飞机、车辆和地面接收装置发射自身的位置等信息,除了实现空对空相互监视、空对地监视外,还可实现其它多方面的功能:空中飞机可自动识别相互位置,保持间隔;地面ATC可对终端和航路飞行的飞机实施监控指挥;机场地面活动的飞机、车辆间保持安全间隔,起到地面监视作用。
ADS-B主要实施空对空监视,一般情况下,只需机载电子设备(GPS接收机、数据链收发机及其天线、驾驶舱冲突信息显示器CDTI),不需要任何地面辅助设备即可完成相关功能,装备了ADS-B的飞机可通过数据链广播其自身的精确位置和其它数据(如速度、高度及飞机是否转弯、爬升或下降等)。
ADS-B接收机能与空管系统、其它飞机的机载ADS-B结合起来,在空地都能提供精确、实时的冲突信息。
与传统雷达不同,ADS-B可在低空和地面工作。
因此,能用来监控滑行道和跑道上的冲突,并能有效地在偏远地区或山区的雷达无法覆盖或受限制的地区使用。
所以,ADS-B能同时向机组和管制员提供实时信息,机组和管制员在第一时间就能“看到”同样的信息。
ADS-B依靠星基GPS来确定空中飞机的精确位置(还有精密时间基准UTC),然后将位置信息转换成数字码,该数字码结合了其它一些信息(如速度、高度及飞机是否转弯、爬升或下降),每秒更新数次,在适当的频率下通过数据链从飞机广播出来,位于可接收范围内的其它飞机和地面站就能接收到数据链广播,将其信息在屏幕上显示出来。
ADS_B实验报告姓名:学号:学院:实验一 ADS_B地面接收实验一、 实验目的1)了解ADS-B监视系统功能、设备安装等基本要求;2)掌握ADS-B监视系统工作原理、工作流程;3)了解民航标准ADS-B报文数据格式;4)掌握ADS-B报文解析数据内容,解析原理。
二、实验原理ADS-B OUT是指航空器发送其位置信息和其他信息。
机载发射机以一定的周期发送航空器的各种信息,包括:航空器识别信息(ID)、位置、高度、速度、方向和爬升率等。
OUT是机载ADS-B设备的基本功能。
ADS-B发送的航空器水平位置一般源于GNSS系统,高度源于气压高度表。
地面系统通过接收机载设备发送的ADS-B OUT信息,监视空中交通状况,起到类似于雷达的作用。
ADS-B模拟系统,支持1090 ES协议,具有接收S模式的DF17、DF18报文能力;实时接收、处理并输出模式A/C/S、ADS-B信息,包括24-bit飞机地址、UTC时间信息(基于GPS)、信号强度、S模式下行报文、高度信息、位置信息、水平和垂直速度信息、最近位置修正时间信息、飞机ID、飞机种类、Squitter种类、应答机能力、紧急和告警信息等;具有ASTERIX CAT 21数据输出接口;显示终端具有动态航迹显示功能。
三、实验仪器主机、GPS接收天线、L波段全向天线、射频电缆、ADS_B地面接收设备、本地显控计算机等。
四、实验系统组成ADS_B地面接收设备包括主机、GPS接收天线、L波段全向天线、射频电缆等其系统框图如下图1 ADS_B模拟系统地面接收系统组成框图六、实验步骤a)安装楼顶天线,连接ADS_B地面接收设备,连接GPS设备,b)分别通过串口和网口将ADS_B地面接收设备与计算机连接,在ADS_B 接收软件观察是否能正常接收;c)将本地计算机显控端口地址设置为2000;d)并预热10min,接收空中目标,通过ADS_B接收软件观察出入双流机场的飞机航班信息;e)观察目标的各类属性,截取ADS_B软件观察到的航班航迹图。
沈阳航空航天大学综合课程设计ADS-B报文数据的解析研究班级学号学生姓名指导教师课程设计任务书课程设计的内容及要求:一、设计说明对接收到的ADS-B数据进行解析,就是要对航空报文有较多了解,根据编码协议对报文进行解码,从里面提取出有用信息,能让人直观理解报文信息二、设计要求根据链路协议及编码协议,对报文解析,要实现:1.能够解析出速度,高度,经纬度等重要信息;2.界面尽量友好,误差要小;3.数据能够实时更新三、实验要求用VC++实现编程和解析四、推荐参考资料五、按照要求撰写课程设计报告成绩评定表一、概述空中交通管理的根本目的是使航线上的飞机安全、有效和有计划地在空域中飞行, 管制员需要对管制空域内飞机的飞行动态进行实时监视。
传统的雷达监视手段采用询问/ 应答方式对目标探测。
从长远来看, 雷达系统自身具有很多局限性: 雷达波束的直线传播形成了大量雷达盲区; 无法覆盖海洋和荒漠等地区; 雷达旋转周期限制了数据更新率的提高, 从而限制了监视精度的提高; 无法获得飞机的计划航路、速度等态势数据, 限制了跟踪精度的提高和短期冲突告警STCA ( Short TermConflict Alert ) 的能力。
因此, 需要发展新的监视手段。
广播式自动相关监视ADS- B( Automatic DependentSurveillance- Broadcast ) 即航空器自动广播由机载星基导航和定位系统生成的精确定位信息, 地面设备和其他航空器通过航空数据链接收此信息, 卫星系统、飞机以及地基系统通过高速数据链进行空天地一体化协同监视。
ADS- B 的精度和数据更新率比雷达高, 除位置信息外,ADS- B 还提供其他信息, 包括速度和飞行意向等, 尤其适合于山区、荒漠、边远机场等不宜建设雷达的区域, 也适合于高密度机场的监视, 是未来监视系统的重要组成部分和发展方向。
目前,ICAO(International Civil Aviation Organization,国际民用航空组织)高度重视ADS‐B 的发展与应用,并制订了相关的技术标准和发展规划,并一直在努力倡导在全球统一部署相同标准 ADS‐B 体系,实现全球范围内的飞行监控与数据共享。
我国的民用航空业目前正处于成长期,飞机的数量、飞行的规模和空域的范围都在不断扩大,需要引进并吸收 ADS‐B 技术,以丰富和改进我们自己的空中交通管制系统和体系,并实现与国际最新技术的接轨。
在 ADS ‐B 技术的吸收和应用中,需要不断地研究其基本原理,掌握其技术核心,促进实现国际先进技术与中国本地情况的不断融合。
图1 ADS-B技术在航空中的应用示意图二、ADS-B 系统工作原理ADS-B OUT 系统中,主要的功能由 S 模式应答机实现,在其正常工作期间,周期性的将 DF17 格式的扩展断续振荡信号广播出去,为飞机和地面站提供相关信息包括飞机的经纬度信息、高度信息、航行速度信息等。
在系统正常工作时,应答机接收来自GPS 接收机的导航消息,通过对数据的分析,提取有有用的信息部分组合成为使用于 S模式传输的报文格式,然后以特定的速率通过应答机天线发送出去,当地面站和其他飞机接收到这些信息后,通过对信息的解码、检错、纠错、报文生成过程获取这架飞机的飞行参数,高度速度等有效的信息,这些信息将非常有效的帮助完成空中管理以及飞机间的相关监视过程。
与应答机应答二次雷达的询问一样,DF17 格式的扩展断续振荡信号用一个1090MHz 的载波频率进行调制并以 1Mbps 数据速率广播脉冲位置,扩展断续振荡脉冲的长度为 112 比特。
在接收的数据部分中,以DF17 格式的扩展断续振荡信号为例,共有 5 个主要的飞行任务字段。
其中,第一个字段为DF 位格式字段,长度为 5 比特,主要作用在于识别扩展断续振荡的内容,此字段设置为固定值17(十进制数),本项目工作的研究也主要针对此类信号。
接下来则是 3 比特的应答机能力(CA)字段,该字段描述了飞机的S 模式数据链通信能力,如是否装载了ADS 系统等。
广播地址(AA)字段是消息中最重要的一个字段,该字段唯一的识别了每个飞机独一无二的24 比特的S 模式地址,用来表明飞机的身份。
接下来是机载设备采集整合的信息ME 字段,56 比特的扩展型断续振荡报文是主要的ADS-B 消息,该消息主要包括飞机的参数信息如高度、速度、经度、纬度等信息,它为飞机参数如GPS 位置和速度提供报文有效信息。
最后,24 比特的奇偶性(PI)字段,该字段为前88 位数据信息的CRC 校验余数,用于实现CRC 检错纠错。
三相关技术1.1090 ES数据链1090 ES(Extended Squitter,扩展电文)的命名中包含两层含义。
1090 指的是该数据链的下行传输频带是 1090MHz。
ES 指的是对原有 ADS-B 报文长度的扩展。
原有的报文长度一般为 56-112 比特。
1090 ES 是由 ICAO 推荐的、唯一一个可以在全球范围内使用的数据链技术,得到了美国、欧洲、亚洲等大部分国家的承认和应用。
在第 11 次国际航空会议上,已经将1090 ES 作为 ADS-B 主要数据链技术,并制定了相关的协议和标准。
1090 ES 是一种 S 模式的数据链,支持一对一的询问-应答机制。
S 是Selective 的意思,指的是可以对航空器进行选择通信。
1090 ES 采用 PPM(脉冲位置调制)编码。
2. ADS-B IN 设备报文系统采用的 ADS-B IN 设备,在收到 ADS-B 报文后,对 ADS-B 报文进行了二次封装,增加了报文头,将 ADS-B 报文作为它的载荷。
封装后的报文被 ADS-B IN 设备通过网络转发给其它设备。
除此之外,ADS-B IN 设备还发送一些状报文,描述设备时间和位置等信息。
ADS-B IN 设备可以发出的报文一共有三类:1)Message Report2)Time Report3)Position Report我们用的接收设备是SBS-3接收机,主要分析Message Report,即DF17数据,所以其他两种 Report不多做介绍。
表1 Message report的格式Message Report 的报文长度共28 个字节。
一些关键字段的说明如下:<type>字段,取值范围是0-4,0-3 代表Message Report 或Time Report,两者的区分可以通过<message>字段的内容来辨别。
0-3 的不同之处在于<time>时间标准的不同。
0是本地时间,1 是NOT COUPLED 类型的UTC 时间,2 是COASTING 类型的UTC 时间,3 是COUPLED 类型的UTC 时间。
4 代表Position Report。
<flag>字段是一个按位解析的字段,第0 位指示了接收的天线,其值为0 表示从A天线接收;值为 1 表示从B 天线接收。
第 3 位指示了<amp>字段的单位和范围,其值为0 表示信号强度的单位是ADC 的LSB,范围是0 到255;值为1 表示信号强度的单位是d Bm,范围是-127 到127。
其它位目前都没有使用,缺省设置为0。
<crc>字段的计算采用了常用的CRC-16,其生成多项式是X16+X15+X2+1,对应的二进制位列为 1 1000 0000 00000101,因为其MSB 必然为1,可以省略MSB,简写为1000000000000101。
3. ADS-B 基本报文ADS-B 报文由业务数据和附加数据两部分组成。
ADS-B 基本报文指的是从宏观的角度,将业务数据作为一个整体而不考虑其细节,所展现出来的ADS-B 报文。
ADS-B 基本报文对ADS-B 业务数据进行了封装,作为ADS-B 基本报文的一个独立字段存在。
在ADS-B 的业务数据中,包含了不同类型的业务数据,它们具有不同的结构。
本节将这些不同格式的业务数据称之为ADS-B 业务报文。
ADS-B 报文的长度共112 位,是按位进行格式设计的结构。
下表是1090ES 的报文结构定义,ADS-B 的报文基本结构包含在其中表2 1090ES报文结构四.信息处理ADS-B数据的信息处理包括数据的接收与解析两大部分,其中包括循环冗余校验, LSB 与 MSB,数据的打包与解包,多线程操作,CPR解码算法等技术,由于侧重点不同,这里主要讲一下数据的发送和接收及解析算法。
1.数据的发送和接收ADS-B 报文从发送从网络上接收最初始的数据,到转换成 ME 报文,其过程如下图所示。
图3 收发,解析数据示意图数据的发送和接收遵循TCP通信协议,按照协议编码就行,这里不再赘述。
2.数据的解析数据的解析是重中之重,这是决定你能否得到想要的结果的至关重要的一步,也是本次课设所重点研究的方面。
数据的编码与解析是按照协议进行的,对飞机的身份,编号,高度,速度,经纬度等信息进行编码,其中除了经纬度,其他信息大多按照进制数进行编码,不需要太复杂的算法,因此,这里只讲经纬度的算法解析。
CPR解码分为全球解码和本地解码两种情况。
如果同时接收到奇编码和偶编码两个消息,那么进行全球解码。
如果只接收到一个奇编码或偶编码消息,那么进行本地解码。
不论是全球解码还是本地解码,又分为空中位置和地面位置两类情况全球明确的空中位置和地面位置的解码步骤为:1)计算纬度Zone 的尺寸DlatiDlati = 360°/( 4NL - i)空中位置 i = 0(偶编码)90°/( 4NL - i)地面位置 i = 0(偶编码)2)计算纬度索引jj = floor(( 59 × YZ0 - 60 × YZ1 )/217 + 1/2)当j<0 时, j = 偶纬度Zone 的编号- 60, j = 奇纬度Zone 的编号- 59;当j≥0 时, j= 偶纬度Zone 的编号,j = 奇纬度Zone 的编号。
3)计算偶形式的纬度Rlat0和奇形式的纬度Rlat1Rlati = Dlati × MOD( j,60 - i) + YZi /217若求出的纬度绝对值大于90°,则应减去360°。
因为纬度的取值范围为-90°~+90°。
4)计算纬度数NL( Rlat0)和NL( Rlat1)。
判断NL( Rlat0)是否与NL( Rlat1)相等。
若相等,则计算经度Zone 的尺寸Dloni。
否则,继续等待下一个位置消息。
5)计算经度Zone 的尺寸Dloni。
根据刚接收到的空中位置消息是偶编码( i = 0)还是奇编码( i = 1),按式( 12)计算Dloni = 360°/ni空中位置 i = 0(偶编码)90°/ni地面位置 i = 1(奇编码)式中ni = max[NL( Rlati) - i,1]。