两轮自平衡小车系统制作研究
- 格式:doc
- 大小:24.50 KB
- 文档页数:5
两轮智能平衡小车研究思路和方法两轮智能平衡小车是一种应用于机器人领域的新兴技术。
该车可以在不借助外力的情况下,保持平衡状态并完成各种运动任务。
本文将介绍两轮智能平衡小车研究的思路和方法。
一、研究思路两轮智能平衡小车的研究思路是将传感器、控制器和电机组成一个可控制的系统。
系统监测小车的姿态和运动状态,并调整车身的倾斜角度和转速,以保持平衡状态。
具体思路如下:1. 对小车的电路进行设计和搭建,包括底层硬件协议和数据传输协议。
2. 选择和安装传感器,包括加速度计和陀螺仪。
通过这些传感器来获取小车的姿态和运动状态的信息。
3. 设计小车的控制器,包括将传感器获取的数据转换成控制信号的代码。
4. 设计和调试小车的电机驱动程序,以保证控制信号能够按照设定的方式正确地操作电机,并实现车身的平衡控制。
5. 完成小车的充电和充电管理系统。
二、研究方法两轮智能平衡小车的研究方法主要可以分为以下几个阶段:1. 车载装置安装:选择合适的传感器并将其安装在小车上。
同时,需要在小车上安装电池和充电系统。
2. 传感器校准和参数优化:通过收集和分析传感器的数据,可以校准传感器的误差,并对传感器的参数进行优化,以提高控制精度。
3. 控制器设计:开发适用于平衡车的控制器,并对控制器进行验证。
在设计控制器时,需要将传感器输出的数据进行滤波处理,并设置控制参数,以实现正确的运动控制。
4. 电机驱动程序设计和测试:为小车设计驱动程序,使其能够实现平稳的平衡控制,并能够实现必要的运动步态。
同时,需要进行严格的测试和验证,以确保小车在运动时能够保持平衡。
5. 性能测试:通过对小车进行不同场景的测试,可以评估平衡车系统的性能。
测试时需要考虑不同的地形和环境条件,以评估平衡车的实际应用情况。
三、总结两轮智能平衡小车研究是一个复杂的系统工程,需要涉及机械结构、电子技术、传感技术、控制系统等多个领域。
在研究中需要充分利用各种工具和方法,规划研究方向和目标,设计测试方案和方法,以实现高效的研究和开发。
2021.14科学技术创新基于PID 控制的两轮自平衡小车的研究李志豪司永康屈志扬李建军李高展曲艺晗(河南科技大学机电工程学院,河南洛阳471003)1概述近年来,两轮式自平衡小车的研究在美国、日本、等国都得到了迅速发展。
平衡车能够通过自身的整体协调性操作平衡,而且体积小,容易上手,成为越来越多人的一种代步工具。
平衡车的动力来源是锂电池,没有碳排放,是一种绿色出行方式,能很好的保护环境。
目前,平衡车已经进入越来越多人的视野之中,我们研究的目的是使小车能在正常的环境下正常前进和后退,保证正常的直立运行。
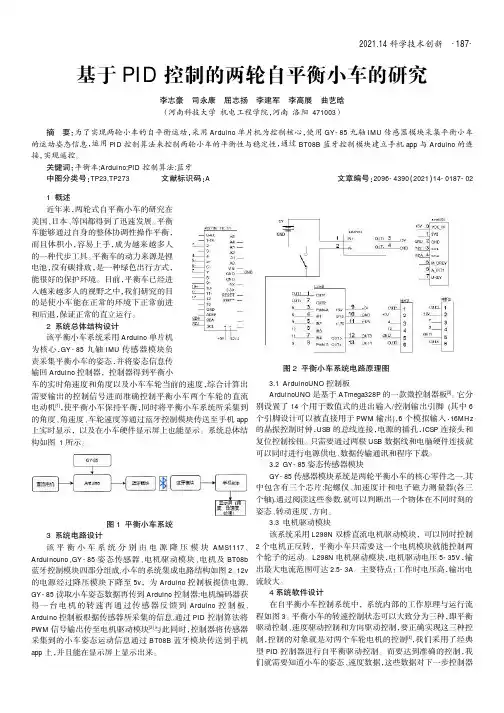
2系统总体结构设计该平衡小车系统采用Arduino 单片机为核心,GY-85九轴IMU 传感器模块负责采集平衡小车的姿态,并将姿态信息传输回Arduino 控制器,控制器得到平衡小车的实时角速度和角度以及小车车轮当前的速度,综合计算出需要输出的控制信号进而准确控制平衡小车两个车轮的直流电动机[1],使平衡小车保持平衡,同时将平衡小车系统所采集到的角度、角速度、车轮速度等通过蓝牙控制模块传送至手机app 上实时显示,以及在小车硬件显示屏上也能显示。
系统总体结构如图1所示。
图1平衡小车系统3系统电路设计该平衡小车系统分别由电源降压模块AMS1117、Arduinouno 、GY-85姿态传感器、电机驱动模块、电机及BT08b 蓝牙控制模块四部分组成,小车的系统集成电路结构如图2。
12v 的电源经过降压模块下降至5v ,为Arduino 控制板提供电源,GY-85读取小车姿态数据再传到Arduino 控制器;电机编码器获得一台电机的转速再通过传感器反馈到Arduino 控制板,Arduino 控制板根据传感器所采集的信息,通过PID 控制算法将PWM 信号输出传至电机驱动模块[2]与此同时,控制器将传感器采集到的小车姿态运动信息通过BT08B 蓝牙模块传送到手机app 上,并且能在显示屏上显示出来。
3.1ArduinoUNO 控制板ArduinoUNO 是基于ATmega328P 的一款微控制器板[3]。
双轮自平衡小车项目可行性研究分析汇报1、PU为全球首例整合性轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差问题,减少了大量包装空间。
MPU整合了轴陀螺仪、轴加速器,并含可藉由第二个IC端口连接其他厂牌之加速器、磁力传感器、或其他传感器数位运动处理(DMP:DigitalMotionProcessor)硬件加速引擎,由主要IC端口以单一数据流形式,向应用端输出完整轴融合演算技术InvenSense运动处理资料库,可处理运动感测复杂数据,降低了运动处理运算对操作系统负荷,并为应用开发提供架构化API。
MPU角速度全格感测范围为、与sec(ds),可准确追緃快速与慢速动作,并且,用户可程式控制加速器全格感测范围为g、gg与g。
产品传输可透过最高至kHzIC 或最高达MHzSPI。
MPU可在不同电压下工作,VDD供电电压介为V、V 或V,逻辑接口VVDIO供电VSS电源地D数据VDD电源正极D数据VL 液晶显示偏压D数据RS数据命令选择D数据RW读写选择D数据E使能信号D数据D数据BLA背光源正极D数。
2、据长度为位N=:双列字,N=:单列字;F=:x字形,F=:x字形CGRAM地址设定CGRAM地址将所要操作CGRAM地址放入地址计数器DDRAM地址设定DDRAM地址将所要操作DDRAM地址放入地址计数器忙碌标志位BFBF地址计数器内容读取地址计数器,并查询LCM是否忙碌,BF表示LCM忙碌写入数据写入数据将数据写入CGRAM或DDRAM 读取数据读取数据读取CGRAM或DDRAM数据图LCD内部显示地址例如第二行第一个字符地址是H,那么是否直接写入H就可以将光标定位在第二行,第一个字符位置呢?这样不行,因为写入显示地址时要求最高位D恒定为高电平所以实际写入数据应该是B(H)+B(H)=B(CH)。
在对液晶模块初始化中要先设置其显示模式,在液晶模块显示字符时光标是自动右移,无需人工干预。
两轮自平衡小车设计报告设计报告:两轮自平衡小车一、引言二、设计理念本设计希望实现一个简洁、稳定和高效的两轮自平衡小车。
考虑到小车需要快速响应外界环境变化,并迅速做出平衡调整,因此采用了传感器、控制器和执行机构相结合的设计思路。
通过传感器获取小车倾斜角度和加速度等数据,通过控制器对采集的数据进行处理和判断,并通过执行机构实时调整车身的倾斜角度,以实现平衡行走。
三、原理四、硬件结构1.车身结构:车身由两个电机、一个控制器、一个电池和一个平衡摆杆组成。
2.电机:采用直流无刷电机,具有较高的转速和输出功率。
3.控制器:采用单片机控制模块,能够对传感器数据进行处理和判断,并输出控制信号给电机。
4.传感器:主要包括陀螺仪、加速度计和倾斜传感器,用于感知小车的倾斜角度和加速度等数据。
5.电池:提供小车的电力供应,保证小车正常运行。
五、软件控制小车的软件控制主要包括数据处理和判断、控制信号生成和输出三个方面。
1.数据处理和判断:通过获取的传感器数据,包括倾斜角度和加速度等信息,根据预设的控制算法进行数据处理和判断。
2.控制信号生成:根据处理和判断得出的结果,生成相应的控制信号。
控制信号包括电机的转动方向和速度。
3.控制信号输出:将生成的控制信号输出给电机,实现倒立摆的平衡。
六、小车性能测试为了验证小车的设计和功能是否符合预期,进行了多项性能测试。
1.平衡行走测试:将小车放在平坦的地面上,通过传感器检测到小车的当前倾斜角度并进行调整,实现小车的自平衡行走。
2.转向测试:在平衡行走的基础上,通过控制信号调整两个电机的速度差,从而实现小车的转向。
3.避障测试:在平衡行走和转向的基础上,添加超声波传感器等避障装置,实现小车的避障功能。
七、总结通过本设计报告的详细介绍,我们可以看出两轮自平衡小车具备平衡行走、转向和避障等功能,为用户提供了一个稳定、高效的移动平台。
未来,我们将进一步优化小车的设计和控制算法,提高小车的性能和应用范围。
两轮自平衡车控制系统的设计与实现一、自平衡车系统概述1、定义自平衡车是一种以双轮直立结构/双轮平移结构的小型无线遥控电动车,最初由电动车作为主要的运动机构,但也有可能有其他特殊机构,进行实时控制,使其能够在平衡和模式控制下,保持水平稳定态,实现自动平衡、自主康复和自由行走。
2、系统功能自平衡车系统的功能是通过实时控制平衡并实现模式控制,使自平衡车实现自动平衡、自主康复和自由行走,从而达到智能化的操作目的,解决双轮自行车无主动平衡功能的问题。
二、系统设计1、硬件系统自平衡车的硬件系统由电池、ESC(电子转向控制器)、遥控组件、周边传感器组件、电路板组件等构成。
2、软件系统自平衡车的控制系统主要由ARMCortex-M0 MCU、单片机程序、PID算法组成。
三、系统实现1、硬件系统实施(1)第一步,在自平衡车上安装ESC,ESC的电池由智能充电器连接,使自平衡车进行自动充电;(2)第二步,给控制器方向键插上遥控器,使用户可以控制车辆移动;(3)第三步,在车辆上安装多个传感器,在控制板上增加芯片,使用户可以对车辆进行实时监测;(4)第四步,在控制板上安装一个ARM Cortex-M0 MCU处理器,将控制算法由单片机程序烧录形成可控制的处理系统。
2、软件系统实施(1)随着ARM处理器的安装,自平衡车可以被SONI的特殊的烧录器进行烧录,该程序可以控制车辆的转向和速度;(2)安装完毕后,需要建立多个变量从传感器接受数据,读取车辆的平衡状态,并控制车辆前后左右的运动;(3)最后,我们选择PID算法来实现车辆实时的控制,根据车辆当前的实际情况,调节PID距离和速度增量使自平衡车实现实时的模式控制。
四、结论本文介绍了自平衡车控制系统的设计思想和实现步骤,通过控制平衡,实现自动平衡、自主康复和自由行走,使得自平衡车有更多的功能,在以后的应用中,自平衡车的研究和应用实际会有很大的推动作用。
两轮自平衡小车控制系统的设计摘要:介绍了两轮自平衡小车控制系统的设计与实现,系统以飞思卡尔公司的16位微控制器MC9S12XS128MAL作为核心控制单元,利用加速度传感器MMA7361测量重力加速度的分量,即小车的实时倾角,以及利用陀螺仪ENC-03MB测量小车的实时角速度,并利用光电编码器采集小车的前进速度,实现了小车的平衡和速度控制。
在小车可以保持两轮自平衡前提下,采用摄像头CCD-TSL1401作为路径识别传感器,实时采集赛道信息,并通过左右轮差速控制转弯,使小车始终沿着赛道中线运行。
实验表明,该控制系统能较好地控制小车平衡快速地跟随跑道运行,具有一定的实用性。
关键词:控制;自平衡;实时性近年来,随着经济的不断发展和城市人口的日益增长,城市交通阻塞以及耗能、污染问题成为了一个困扰人们的心病。
新型交通工具的诞生显得尤为重要,两轮自平衡小车应运而生,其以行走灵活、便利、节能等特点得到了很大的发展。
但是,昂贵的成本还是令人望而止步,成为它暂时无法广泛推广的一个重要原因。
因此,开展对两轮自平衡车的深入研究,不仅对改善平衡车的性价比有着重要意义,同时也对提高我国在该领域的科研水平、扩展机器人的应用背景等具有重要的理论及现实意义。
全国大学生飞思卡尔智能车竞赛与时俱进,第七届电磁组小车首次采用了两轮小车,模拟两轮自平衡电动智能车的运行机理。
在此基础上,第八届光电组小车再次采用两轮小车作为控制系统的载体。
小车设计内容涵盖了控制、模式识别、传感技术、汽车电子、电气、计算机、机械及能源等多个学科的知识。
1 小车控制系统总体方案小车以16位单片机MC9S12XS128MAL作为中央控制单元,用陀螺仪和加速度传感器分别检测小车的加速度和倾斜角度[1],以线性CCD采集小车行走时的赛道信息,最终通过三者的数据融合,作为直流电机的输入量,从而驱动直流电机的差速运转,实现小车的自动循轨功能。
同时,为了更方便、及时地观察小车行走时数据的变化,并且对数据作出正确的处理,本系统调试时需要无线模块和上位机的配合。
浅论小型两轮自平衡电动车系统的设计与研究论文浅论小型两轮自平衡电动车系统的设计与研究论文小型两轮自平衡电动车控制方案,是使用姿态检测传感器来检测小车姿态的变化,运用合适的运动控制原理,驱动电机进行相应的调整,以保持小车平衡、但在实际设计中,加速度计检测出来的数据易受小车运动速度影响,陀螺仪检测出来的数据易受温度影响,因此需要采用滤波器对其进行滤波、通过对卡尔曼滤波器与互补滤波器这两种不同的滤波器进行比较,在基于飞思卡尔公司Kinetis K60的小型两轮自平衡电动车姿态稳定系统上加以验证,从而得出在实际设计中卡尔曼滤波器优于互补滤波器。
1控制系统分析与设计1.1系统分析小型两轮自平衡电动车系统主要由姿态传感器,CMOS摄像头传感器、矢量光电编码器,Kinetis K60单片机、直流减速电泪L及其驱动电路组成。
陀螺仪与加速度计的数据经过AD转换后传至控制器中,通过滤波器进行滤波后,获得较为精确的角速度和角加速度数据,从而计算得到角度偏差;摄像头采集道路信息,进行路径识别,使小车沿一定路径J决速运行光电编码器采集车轮速度,通过负反馈控制小车速度,三者数据融合后,再通过PID算法输出控制量,生成PWM从而控制电机运行。
1.2矢量编码器小车进行角度姿态控制时会产生两个自由度上的偏移,除用测量角度的加速度计和陀螺仪外,还需要增加测量两轮车位移的传感器,这里选用可以测量正负位移的欧姆龙500线矢量编码器(A日相光电编码器)。
2角度滤波算法分析从加速度计采集到的角度信息存在高频干扰,输出电压,矢量编码器控制电路会在实际反映倾角的电压值附近波动、要从陀螺仪获得角度信息,需要经过积分运算,而从单片机采集的角速度信息存在误差和温度偏移、这个误差会随时间延长而积累,最终导致输出信号偏离真实角度信号、因此,下面介绍两种滤波法,对两种传感器所获得信息进行校正。
2.1互补滤波器通过加速度计和陀螺仪积分获得的`两种与角度相关的信息,利用加速度计修正陀螺仪的积分输出,利用陀螺仪修正加速度计的高频干扰。
【毕业论文】两轮自平衡小车研究本科毕业设计题目两轮自平衡小车研究学院电子信息工程学院专业自动化学生姓名学号202110311332 年级2021级指导教师职称博士年月日两轮自平衡小车研究专业:自动化学号:202110311332摘要:现在两轮自平衡小车的研究在全世界得到很大的关注。
本论文主要工作是对两轮自平衡小车的原理进行研究并且和提出一种设计方案。
本次设计方案是采用ENC-03MB陀螺仪传感器和MMA7361LC三轴加速度倾角传感器构成小车的状态检测装置,使用算法使陀螺仪数据和加速度计数据的融合得到小车的倾角,再通过一定的算法使小车保持直立状态。
系统采用飞思卡尔公司的DSC 16位处理器XS128单片机为核心控制处理器,完成传感器信号的处理,滤波算法的实现和车身控制等一些任务。
在小车制作完成后,各个模块之间能够正常并且协调的工作,小车可以只无人干预的条件下实现自主平衡,运用蓝牙可以控制小车的前进、后退、左右转动等各个动作。
关键词:两轮自平衡小车;陀螺仪;加速度倾角传感器;XS128单片机Research of The Two-wheel Self-balance CarSpecialty:Automation Student Number:202110311332Student:Liu Changgen Supervisor:Luo JunyiAbstract:Now ,the research of two-wheel self-balance car get great attention all over the world.The main job of this paper is to study the principle of the two-wheel self-balance car and put forward a design scheme.This design used ENC-03MB gyroscope sensor and MMA7361LC triaxial acceleration and angle sensor constitute the car status detectioning algorithms made fusion of gyroscope data and accelerometer data to get the tilt angle of the car.Then ,through a certain algorithm to make the car keep upright.The system adopted freescale company DSC 16-bit processor XS128 single-chip microcomputer as the control core,it realized the sensor signal processing the sensor signal processing,filtering algorithm and body control and so on.After the car production is completed,each module can be normal and to coordinate work,the car can keep balancing in unmanned ing mobile phone Bluetooth cancontrol the car forward,backward,turn right or left,and other actions.Key words:Two-wheel Self-balance Car ;Gyroscope;Angle Acceleration Sensor;XS128 Single Chip Microcomputer\* MERGEFORMAT\* MERGEFORMAT I目录TOC \o "1-3" \h \u l _Toc12550 第1章绪论 REF _Toc12550 1l _Toc12946 1.1 背景 REF _Toc12946 1l _Toc14595 1.2 选题的目的和意义 REF _Toc14595 1l _Toc25634 1.3两轮自平衡小车的国内外研究现状 REF _Toc25634 2l _Toc18524 1.3.1 两轮自平衡小车在国外的研究现状 REF _Toc18524 2l _Toc18461 1.3.2 两轮自平衡小车在国内的研究现状 REF _Toc18461 4l _Toc27645 1.4 主要的研究内容 REF _Toc27645 5l _Toc23975 第2章两轮自平衡小车的原理 REF _Toc23975 6l _Toc23737 2.1 两轮自平衡小车直立运动分析 REF _Toc23737 6l _Toc24447 2.2 小车的平衡控制 REF _Toc24447 6l _Toc8874 2.3 小车的角度和角速度测量 REF _Toc8874 8l _Toc21605 2.3.1 加速度传感器 REF _Toc21605 8l _Toc29805 2.3.2 陀螺仪 REF _Toc29805 8l _Toc16346 2.4 小车的速度控制 REF _Toc16346 9l _Toc14709 第3章两轮自平衡小车的电路和程序设计 REF _Toc14709 10 l _Toc23984 3.1 两轮自平衡小车电路设计 REF _Toc23984 10l _Toc4044 3.1.1 小车的整体电路框图 REF _Toc4044 10l _Toc26433 3.1.2 单片机最小系统 REF _Toc26433 11l _Toc30966 3.1.3 陀螺仪和加速度计传感器电路 REF _Toc30966 11l _Toc5965 3.1.4 电机驱动电路 REF _Toc5965 12l _Toc11988 3.1.5 电源模块电路 REF _Toc11988 13l _Toc2506 3.2 两轮自平衡小车程序设计 REF _Toc2506 13l _Toc26809 3.2.1 程序的功能和流程框架 REF _Toc26809 13l _Toc16169 3.2.2 各个模块的程序 REF _Toc16169 15l _Toc23056 第4章两轮自平衡小车的制作和调试 REF _Toc23056 33l _Toc1764 4.1 小车的承载局部制作 REF _Toc1764 33l _Toc16193 4.2 小车传感器的安装 REF _Toc16193 33l _Toc29515 4.3 小车的调试 REF _Toc29515 34l _Toc12987 4.3.1 小车调试条件 REF _Toc12987 34l _Toc18667 4.3.2 小车调试 REF _Toc18667 34l _Toc4940 4.3.3 参数调试 REF _Toc4940 35l _Toc11784 第5章结论 REF _Toc11784 36l _Toc20009 附录 REF _Toc20009 37l _Toc17146 附录1 电路原理图 REF _Toc17146 37附录 l _Toc12889 2电路PCB图 REF _Toc12889 37l _Toc21110 附录3 小车直立图片 REF _Toc21110 38l _Toc24675 参考文献 REF _Toc24675 39l _Toc257 致谢 REF _Toc257 40成都学院学士学位论文〔设计〕\* MERGEFORMAT\* MERGEFORMAT 1第1章绪论1.1 背景近年来,随着移动机器人研究不断深入、应用领域更加广泛,所面临的环境和任务也越来越复杂。
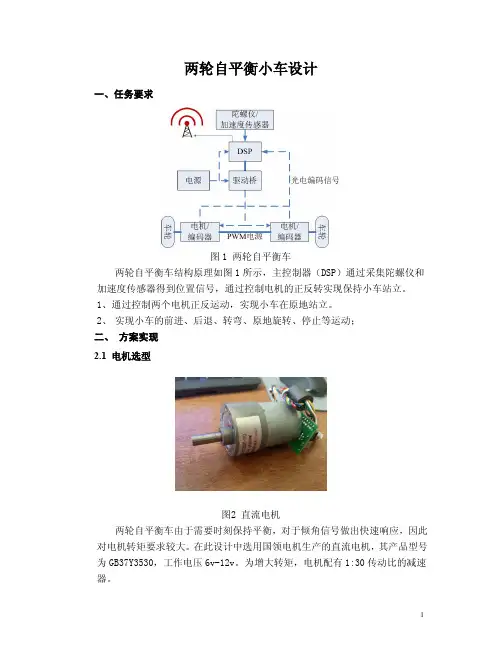
两轮自平衡小车设计一、任务要求图1两轮自平衡车两轮自平衡车结构原理如图1所示,主控制器(DSP)通过采集陀螺仪和加速度传感器得到位置信号,通过控制电机的正反转实现保持小车站立。
1、通过控制两个电机正反运动,实现小车在原地站立。
2、实现小车的前进、后退、转弯、原地旋转、停止等运动;二、方案实现2.1电机选型图2直流电机两轮自平衡车由于需要时刻保持平衡,对于倾角信号做出快速响应,因此对电机转矩要求较大。
在此设计中选用国领电机生产的直流电机,其产品型号为GB37Y3530,工作电压6v-12v。
为增大转矩,电机配有1:30传动比的减速器。
2.2电机测速方案图3霍尔测速传感器在电机测速方案上主流的方案有两种,分别是光电编码器和霍尔传感器。
光电编码器测量精度由码盘刻度决定,刻度越多精度越高;霍尔传感器精度由永磁体磁极数目决定,同样是磁极对数越高精度越高。
由于两轮自平衡车工作于剧烈震动环境中,光电编码器不适应这种环境,因此选用霍尔传感器来测量速度。
电机尾部加装双通道霍尔效应编码器,AB双路输出,单路每圈脉冲16CPR,双路上下沿共输出64CPR,配合1:30的减速器传动比,可以计算出车轮转动一圈输出的脉冲数目为64X30=1920CPR,完全符合测速要求。
2.3电机驱动控制系统概述本平台电机驱动采用全桥驱动芯片L298N,内部包含4通道逻辑驱动电路,两个H-Bridge的高电压、大电流双全桥式驱动器。
本驱动桥能驱动46V、2A 以下的电机。
其输出可以同时控制两个电机的正反转,非常适合两轮自平衡车开发,其原理图如下图所示图4L298N原理图采用脉宽调制方式(即PWM,Pulse Width Modulation)来调整电机的转速和转向。
脉宽调制是通过改变发出的脉冲宽度来调节输入到电机的平均电压,即通过不同方波的平均电压不同来改变电机转速。
图5PWM脉宽调节示意2.4倾角位置采集倾角和角速度采集是两轮自平衡车控制的重点,选用MPU6050模块作为其采集模块。
两轮小车自平衡控制系统的研究与设计
随着传统交通工具带来的能源危机、交通拥堵、环境污染等问题日益凸显,人们对新型交通工具的需求日益迫切。
两轮自平衡小车体积小、方便携带,并且采用电池供电不会产生尾气,是现今交通运输领域研究的重点。
同时,两轮自平衡小车是动态稳定的系统,它有着强耦合、非线性、欠驱动、多变量的特点。
因此可以在两轮自平衡小车这个平台上对各种控制算法进行验证,具有一定的理论研究意义。
在两轮自平衡小车领域国内外研究现状的基础上,本文对小车的姿态角检测和自平衡控制进行了研究。
首先,采用牛顿力学原理对小车的车轮、车身和电机分别建立数学模型,并根据三者之间的关系建立小车整体系统的模型。
然后,对小车模型在平衡位置进行线性化,得到简化模型。
对简化的模型进行能观性和能控性分析并采用PID控制理论对小车系统设计平衡控制器。
小车的姿态角包括车身倾角和偏航角,它是小车控制器设计的重要变量,因此姿态角的准确性显得尤为重要。
在本文中使用四元数来描述姿态角,并且对微机电系统(MEMS)采集到的数据利用扩展卡尔曼滤波(EKF)原理进行融合,得到更为准确的姿态角。
最后,对小车各个模块选择相应的芯片,组装小车实体模型。
对两轮自平衡小车的驱动电路、主控电路、检测电路、无线通信电路进行设计,并对各部分编写程序,使小车能够正常工作。
在Matlab中对小车PID控制以及EKF数据融合进行了仿真分析,结果表明小车的PID控制器能够很好的对小车稳定控制,而利用EKF融合使得小车姿态角则更加准确。
在搭建的两轮自平衡小车实物展示中,小车能够保持良好平衡控制效
果。
两轮自平衡小车的设计与实现一、本文概述随着科技的飞速发展,智能化、自主化已经成为现代机器人技术的重要发展方向。
两轮自平衡小车作为一种典型的动态稳定控制机器人,其设计与实现技术对于推动机器人技术的进步具有重要意义。
本文旨在深入探讨两轮自平衡小车的设计理念、实现方法以及关键技术,为相关领域的研究者和爱好者提供有益的参考。
本文将首先介绍两轮自平衡小车的基本概念和原理,阐述其动态稳定控制的基本思想。
随后,将详细介绍两轮自平衡小车的硬件设计,包括电机驱动、传感器选型、控制器设计等关键部分,并阐述各部件之间的协同工作原理。
在此基础上,本文将重点探讨两轮自平衡小车的软件实现,包括平衡控制算法、运动控制算法以及人机交互界面设计等。
本文还将对两轮自平衡小车的性能优化和实际应用进行深入分析,探讨如何提高其稳定性、响应速度以及续航能力等问题。
本文将对两轮自平衡小车的发展趋势和前景进行展望,为相关领域的研究和发展提供有益的参考。
通过本文的阐述,读者可以全面了解两轮自平衡小车的设计与实现过程,掌握其关键技术和应用方法,为推动机器人技术的发展做出贡献。
二、两轮自平衡小车的基本原理两轮自平衡小车,又称作双轮自稳车或双轮倒立摆,是一种基于动态稳定技术设计的个人交通工具。
其基本原理主要涉及到力学、控制理论以及传感器技术。
两轮自平衡小车的稳定性主要依赖于其独特的力学结构。
与传统三轮或四轮的设计不同,双轮自平衡小车只有两个支撑点,这意味着它必须通过动态调整自身姿态来维持稳定。
这种动态调整的过程类似于杂技演员走钢丝,需要精确的平衡和快速的反应。
实现自平衡的关键在于控制理论的应用。
两轮自平衡小车通常搭载有先进的控制系统,该系统通过传感器实时监测小车的姿态(如倾斜角度、加速度等),并根据这些信息计算出必要的调整量。
控制系统随后会向电机发送指令,调整小车的运动状态,以保持平衡。
传感器在两轮自平衡小车中扮演着至关重要的角色。
常见的传感器包括陀螺仪、加速度计和角度传感器等。
本科毕业设计(论文)题目两轮自平衡小车的设计学院电气与自动化工程学院年级专业班级学号学生姓名指导教师职称论文提交日期两轮自平衡小车的设计摘要近年来,两轮自平衡车的研究与应用获得了迅猛发展。
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。
系统选用飞思卡尔16位单片机MC9S12XS128为控制核心,完成了传感器信号的处理,滤波算法的实现及车身控制,人机交互等。
整个系统制作完成后,各个模块能够正常并协调工作,小车可以在无人干预条件下实现自主平衡。
同时在引入适量干扰情况下小车能够自主调整并迅速恢复稳定状态。
小车还可以实现前进,后退,左右转等基本动作。
关键词:两轮自平衡陀螺仪姿态检测卡尔曼滤波数据融合IDesign of Two-Wheel Self-Balance VehicleAbstractIn recent years, the research and application of two-wheel self-balanced vehicle have obtained rapid development. This paper presents a design scheme of two-wheel self-balanced vehicle. Gyroscope ENC-03 and MEMS accelerometer MMA7260 constitute vehicle posture detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion.,and adopts freescale16-bit microcontroller-MC9S12XS128 as controller core. The center controller realizes the sensor signal processing the sensor signal processing, filtering algorithm and body control, human-machine interaction and so on.Upon completion of the entire system, each module can be normal and to coordinate work. The vehicle can keep balancing in unmanned condition. At the same time, the vehicle can be adjusted independently then quickly restore stability when there is a moderate amount of interference. In addition, the vehicle also can achieve forward, backward, left and right turn and other basic movements.Key Words: Two-Wheel Self-Balance; Gyroscope; Gesture detection; Kalman filter; Data fusionII目录1.绪论 (1)1.1研究背景与意义 (1)1.2两轮自平衡车的关键技术 (2)1.2.1系统设计 (2)1.2.2数学建模 (2)1.2.3姿态检测系统 (2)1.2.4控制算法 (3)1.3本文主要研究目标与内容 (3)1.4论文章节安排 (3)2.系统原理分析 (5)2.1控制系统要求分析 (5)2.2平衡控制原理分析 (5)2.3自平衡小车数学模型 (6)2.3.1两轮自平衡小车受力分析 (6)2.3.2自平衡小车运动微分方程 (9)2.4 PID控制器设计 (10)2.4.1 PID控制器原理 (10)2.4.2 PID控制器设计 (11)2.5姿态检测系统 (12)2.5.1陀螺仪 (12)2.5.2加速度计 (13)2.5.3基于卡尔曼滤波的数据融合 (14)2.6本章小结 (16)3.系统硬件电路设计 (17)3.1 MC9SXS128单片机介绍 (17)3.2单片机最小系统设计 (19)3.3 电源管理模块设计 (21)3.4倾角传感器信号调理电路 (22)III3.4.1加速度计电路设计 (22)3.4.2陀螺仪放大电路设计 (22)3.5电机驱动电路设计 (23)3.5.1驱动芯片介绍 (24)3.5.2 驱动电路设计 (24)3.6速度检测模块设计 (25)3.6.1编码器介绍 (25)3.6.2 编码器电路设计 (26)3.7辅助调试电路 (27)3.8本章小结 (27)4.系统软件设计 (28)4.1软件系统总体结构 (28)4.2单片机初始化软件设计 (28)4.2.1锁相环初始化 (28)4.2.2模数转换模块(ATD)初始化 (29)4.2.3串行通信模块(SCI)初始化设置 (30)4.2.4测速模块初始化 (31)4.2.5 PWM模块初始化 (32)4.3姿态检测系统软件设计 (32)4.3.1陀螺仪与加速度计输出值转换 (32)4.3.2卡尔曼滤波器的软件实现 (34)4.4平衡PID控制软件实现 (36)4.5两轮自平衡车的运动控制 (37)4.6本章小结 (39)5. 系统调试 (40)5.1系统调试工具 (40)5.2系统硬件电路调试 (40)5.3姿态检测系统调试 (41)5.4控制系统PID参数整定 (43)5.5两轮自平衡小车动态调试 (44)IV5.6本章小结 (45)6. 总结与展望 (46)6.1 总结 (46)6.2 展望 (46)参考文献 (47)附录 (48)附录一系统电路原理图 (48)附录二系统核心源代码 (49)致谢 (52)V常熟理工学院毕业设计(论文)1.绪论1.1研究背景与意义近年来,随着电子技术的发展与进步,移动机器人的研究不断深入,成为目前科学研究最活跃的领域之一,移动机器人的应用范围越来越广泛,面临的环境和任务也越来越复杂,这就要求移动机器人必须能够适应一些复杂的环境和任务。
两轮自平衡小车系统引言两轮自平衡小车系统是一种具有自主平衡能力的车辆,因其小巧、灵活和节能等优点而备受。
这种小车系统在许多领域都具有广泛的应用前景,如交通运输、救援、工业自动化和娱乐等。
本文将详细介绍两轮自平衡小车系统的设计方法,包括车身结构设计、电路设计和控制系统软件设计等,并对所需的硬件设备和操作方法进行阐述。
定义和概念两轮自平衡小车系统主要由一个或两个电动马达、两个轮子、一个控制器和一个电池组等组成。
其中,平衡点是指小车系统的重心所在的位置,而倾角则是指小车系统与水平面之间的夹角。
通过调节平衡点和倾角,可以使小车系统达到自主平衡状态。
系统设计1、车身结构设计两轮自平衡小车的车身结构是设计的核心之一,它直接影响到小车的稳定性和灵活性。
车身结构应尽量采用轻量化材料,如铝合金或高强度塑料,以减小车身重量和增加灵活性。
此外,车身结构还需考虑轮距、轴距、马达位置等因素,以实现最佳的平衡效果。
2、电路设计电路设计是两轮自平衡小车系统的重要组成部分,主要包括电池组、电机控制器和传感器接口等。
电池组应选择能量密度高、充电速度快且轻量化的电池,以保证小车的续航能力和灵活性。
电机控制器应选用具有PWM控制功能的控制器,以便于调节电机的转速和方向。
同时,还需为传感器接口设计合适的电路,以实现信号的稳定传输。
3、控制系统软件设计控制系统软件设计是实现两轮自平衡小车自主控制的关键。
控制系统软件应包括姿态感知、控制算法和运动规划等模块。
姿态感知模块负责读取传感器数据,如陀螺仪和加速度计,以获取小车的姿态信息。
控制算法模块基于姿态信息计算控制信号,如PID控制器、模糊逻辑控制器等,以实现小车的自主平衡控制。
运动规划模块应根据控制信号计算小车的运动轨迹,以保证小车的平稳行驶。
硬件设备1、传感器两轮自平衡小车需要使用多种传感器,如陀螺仪和加速度计,以实时感知小车的姿态信息。
陀螺仪可以测量小车的角速度,加速度计可以测量小车的加速度,两者结合可以准确计算出小车的姿态角度。
摘要近年来,两轮自平衡机器人的研究取得了快速的发展,两轮自平衡小车的动力学系统是一种多变量、非线性、强耦合的系统,是检验各种控制方法的典型装置。
同时由于它具有体积小、运动灵活、零转弯半径等特点,必将会在军用和民用领域有着广泛的应用前景。
本文主要介绍了基于Freescale MC9S12XS128单片机为控制核心的两轮自平衡小车系统,以验证经典的PID控制在动态平衡系统上的控制效果。
在该系统上,姿态传感器采用MPU6050,单片机在采集到姿态数据后,采用Kalman滤波器对得到的数据进行融合,并在此基础上分析不同滤波方法的效果。
借助增量式PID控制PWM的输出和利用TB6612FNG控制电机的转向以及转速,从而实现了小车的自平衡控制。
关键词:两轮自平衡系统; Kalman滤波;数据融合; HCS12; MPU6050 .Design and implementation of two-wheeled self-balancing vehicleAbstractIn recently years, the research of two-wheeled self-balancing robot has made a rapid development, the dynamics system of two-wheeled self-balancing vehicle is a multivariable, nonlinear, strong coupling system, and also ,it’s a typical devices to test a variety of control methods. Because of it has a small, flexible movement and zero turning radius. It will have a wide range of applications in military and civilian fields.In the article, it describes the Freescale MC9S12XS128 microcontroller-based control of two-wheeled self-balancing vehicle system to verify the classic PID control system in the dynamic balance . On this system, It used MPU6050 as the car state sensing system, and it used the Kalman filter to fuse the obtained angle data, and analyzed the effect of different filtering methods based on this. With incremental PID control PWM output and use TB6612FNG steering and speed control motors, enabling the car's self-balance control finally.Keywords: two-wheeled self-balancing system; the Kalman filter;HCS12;MPU6050目录摘要 (1)第1章绪论 (4)1.1 两轮自平衡机器人概述 (4)1.2 两轮自平衡机器人的发展 (4)1.3 方案论证及选择 (5)1.4 关键技术及目标 (6)1.4.1 姿态数据处理 (6)1.4.2 控制算法的实现 (7)1.4.3 目标 (7)第2章两轮自平衡小车的原理 (8)2.1 小车的直立控制 (8)2.2 倾角与角速度的测量 (12)2.3 本章小结 (12)第3章电路设计 (13)3.1 整体电路框图 (13)3.2 电源电路 (14)3.3 单片机最小系统 (15)3.3.1 S12单片机简介 (15)3.3.2 MC9S12XS128最小系统电路 (15)3.4 MPU6050 (16)3.4.1 MPU6050简介 (16)3.4.2 I2C通信 (17)3.5 电机驱动电路 (17)3.5.1 驱动芯片介绍 (17)3.5.2 驱动电路设计 (18)3.6 速度传感器电路 (19)3.6.1 光电编码器介绍 (19)3.7 无线遥控电路 (19)3.7.1 Pt2262简介 (19)3.7.2 Pt2262应用 (20)3.8 液晶显示电路 (21)3.8.1 LCD1602简介 (21)3.8.2 LCD1602电路 (21)3.9 车模控制电路全图 (22)3.10 本章小结 (24)第4章系统软件设计 (25)4.1 控制算法介绍 (25)4.2 S12单片机初始化 (26)4.2.1 锁相环初始化 (26)4.2.2 PWM模块初始化 (26)4.2.3 串行通信初始化 (26)4.2.4 外部中断初始化 (27)4.3 PID控制的实现 (27)4.4 姿态数据处理 (27)4.4.1 角度计算函数 (27)4.4.2 滤波方法分析与选择 (27)4.5 小车的运动控制 (31)4.6 无线遥控 (31)4.7 本章小结 (31)第5章系统调试 (33)5.1 软件调试工具 (33)5.2 系统调试工具 (33)5.3 系统硬件电路调试 (33)5.4 姿态检测模块调试 (33)5.5 Kalman滤波器参数的整定 (35)5.6 PID参数的整定 (35)5.7 本章小结 (36)第6章总结 (37)6.1 总结与展望 (37)参考文献 (39)附录 (41)附录一系统主控板 (41)附录二系统核心源码 (42)致谢 (45)第1章绪论两轮自平衡系统最早可追溯到上世纪80年代,日本电气通信大学的山藤一雄教授提出的基于倒立摆原理的自动站立机器人的模型被认为是两轮自平衡小车的构思起源。
两轮自平衡车的设计研究首先,两轮自平衡车的设计中最重要的组件是姿态感知器和控制系统。
姿态感知器通过加速度计和陀螺仪等传感器来感知车辆的姿态变化,并将数据传递给控制系统。
控制系统根据这些数据来计算出应该施加的力矩,以保持车辆的平衡。
我们需要精确地设计和调整这些组件,以确保车辆能够稳定地保持平衡。
其次,两轮自平衡车的动力系统也至关重要。
目前常用的动力系统是电池供电的电动机。
电动机将电能转化为机械能,驱动车辆前进。
设计动力系统时需要考虑能量效率、稳定性和驱动力的大小。
另外,选择合适的电池类型和容量也是关键,以确保车辆的续航能力。
此外,两轮自平衡车的操控系统也需要设计和研究。
一个简单直观的操控系统可以提高用户体验,并减少操作难度。
常见的操控系统包括使用身体重心移动来控制车辆的前进、后退和转向。
此外,也可以考虑添加智能化的操控功能,如蓝牙连接手机进行远程操控等。
在结构设计方面,两轮自平衡车需要考虑车辆的稳定性和可靠性。
一个好的结构设计能够提高车辆的抗风性和减震性能。
此外,车辆的重心位置也需要合理安排,以减小车辆倾倒的风险。
最后,两轮自平衡车的安全性是设计中不可忽视的因素。
设备应具备紧急停止和防护措施,以防止意外伤害。
例如,可以在车辆上加装限位开关,在发生故障时停止电机的运转。
另外,可以考虑添加LED灯和蜂鸣器等装置,以提高车辆的可见性和警示效果。
总之,两轮自平衡车的设计研究涉及姿态感知器和控制系统、动力系统、操控系统、结构设计和安全性等多个方面。
通过合理设计和研究,可以提高车辆的平衡性、稳定性和安全性,进一步推动两轮自平衡车的发展和广泛应用。
两轮自平衡小车系统制作研究
[摘要] 自平衡小车是学习和研究各种控制方法的理想实验平台。
而系统灵敏度是研究参数不确定性对系统性能影响的理论,对两轮自平衡小车进行灵敏度分析是深入研究必须要做的工作。
[关键字] 两轮自平衡小车,系统制作,灵敏度
两轮自平衡小车是一个集环境感知,动态决策与规划,行为控制与执行等多种功能于一体的综合系统,是动力学理论和自动控制理论与技术相结合的研究课题,其关键是解决在完成自身平衡的同时,还能够适应各种环境下的控制任务。
利用外加的红外传感器、速度传感器、倾角传感器、防碰撞开关等,来实现小车的自主避障、跟踪、路径规划等复杂功能。
一、两轮自平衡小车的工作原理
当未做控制时,不论车身向前倾斜或者向后倾斜,左右轮都处于静止状态,也就是说车身前后摆动与车轮转动是相互独立的。
当开始控制时,车身在竖直站立的状态下释放,小车有静止、前进、后退三种运动的方式,在正确的控制策略下,小车能够保持自身的平衡。
这三种运动方式与控制策略如下所述:
(1)静止:如果车身重心位于电机轴心线的正上方,则小车将保持平衡静止状态,不需要做任何控制。
(2)前倾:如果车身重心靠前,车身会向前倾斜,则驱动车轮向前滚动,以保持小车平衡。
(3)后退:如果车身重心靠后,车身会向后倾斜,则驱动车
轮向后滚动,以保持小车平衡。
因此,两轮自平衡小车平衡控制的基本思想是:通过测量,得知车身与垂线的之间的相对角度及角速度,控制电机转动的方向以及输出力矩的大小,以此来保持小车自身的动态平衡[1]。
二、两轮自平衡小车系统的模型与分析
1.小车的物理模型
为了方便两轮自平衡小车系统的建模,将其物理结构简化,小车可绕x轴在yoz平面旋转也可在xoy平面中沿着任意方向平移和旋转。
为简化计算,假设驱动电机转子转轴与两轮圆心的连线完全重合,电机安装于可俯仰运动的小车车体上,但除了驱动电机外,不会对机器人的运动产生其他任何作用。
系统建模时以机器人的俯仰角和机器人的位置p(x,y)为系统输入量,以两个驱动电机的输出力矩为系统输出量,不考虑减速齿轮的配合误差及轴承的摩擦的影响。
2.系统模型线性化方法
通过深入学习和比对国内外同课题研究成果,发现研究者基本上都是对小车非线性模型在平衡点附近线性化后,设计控制器进行控制,但可以实现的有效控制范围相当受限,因为当小车的倾斜角度超过一定范围,该线性化模型与原非线性模型相去甚远,从而导致起初设计的控制器效果变差或者完全失效。
线性控制理论已经构成一种科学体系,与此相反,分析和综合非线性控制系统的所需要的非线性控制理论至今尚未构成一种实用的体系。
因此,经常需要
对非线性模型进行线性化[2]。
3.反馈线性化
反馈线性化方法属于精确线性化方法。
反馈线性化的实质就是通过状态预置反馈式,将非线性系统精确地线性化为可控的线性化系统。
但精确线性化方法必须满足苛刻的条件,且结构复杂。
根据实验室同学验证和计算小车系统不能精确线性化的情况下,采用局部反馈线性化的方法,将不能消除的非线性项在平衡点附近进行级数展开近似,实现非线性系统的线性化。
三、灵敏度基本理论及控制算法介绍
应用灵敏度理论来对小车进行分析。
实际系统中不可避免存在一些外部干扰及内部参数摄动等问题,灵敏度函数和补偿灵敏度函数则分别可以显示控制系统对外部扰动,内部参数摄动的影响。
因此,对系统进行灵敏度分析是很有必要的。
1.灵敏度理论
控制系统都是由被控对象及控制器构成。
为了实现对被控对象的高质量控制,一般采用闭环反馈控制系统。
以被控对象而论,其上作用着各种干扰信号,它的内部参数又可能有所摄动,这样就会对系统的特性产生影响,控制系统的输出量往往难以保持要求的定值或对指令信号进行精确跟踪。
因此,可以说实际的系统可描述为:在额定的数学模型上同时作用着指令信号、外干扰信号及等效于参数摄动作用的某种外作用信号。
图1可以描述为实际的系统。
这时候,灵敏度理论的重要性就体现出来了[3]。
图1实际系统等效图
2.灵敏度控制算法
通过对小车线性化方法进行分析,仿真结果明显证明了基于反馈线性化方法得到的线性模型设计的控制系统明显具有更好的鲁棒。
虽然从反馈阵来说,反馈也比较强,但是由于反馈线性化,对原非线性系统还有非线性项反馈,经过实验时同事验证,与泰勒级数展开线性化方法相比,在控制相同角度时,反馈线性化控制器输出u更小[4]。
采用泰勒级数展开线性化方法得到的线性模型,通过改变车体质量和车体质心高度这两个重要参数,设计状态反馈控制系统。
进而对这两个结构参数进行灵敏度分析,得出一些结论:小车车体的质量越小,系统灵敏度函数和最大补偿灵敏度越小,即系统的鲁棒性越好,相应的反馈也比较弱。
可以同过减轻车体质量的方法,提高系统的鲁棒性。
因此这就要系统尽量避免这个值。
3.灵敏度时间最优控制
最优控制中,可以对控制加上约束的有时间最优控制,燃料最优控制和奇异最优控制。
时间最优控制为bang-bang控制,控制u 要么最大,要么最小;燃料最优控制为了实现节省能量,控制器一般为死区函数,一般只有最大,最小,0三个状态;奇异最优控制,主要考虑奇异弧上,控制器如何设计。
就小车线性模型而言,只存在分散的奇异点。
经分析其动力学系统具有多变量、非线性、强耦合、时变、参
数不确定性等特性。
本文选择自平衡小车系统作为理论研究和技术研究试验平台,具有研究的一般性和代表性,在理论和实践方面都具有重要的意义。
参考文献:
[1]徐国华,谭民.移动机器人的发展现状及其趋势[j].机器人技术与应用.2001,14 (3).7-14.
[2]rich chi ooi.balancing a two-wheeled autonomous robot[j].final year thesis of usq, 2003.
[3]郑钧元.两轮自平衡机器人之平衡控制[j].台湾国立中央大学硕士论文,2003.
[4]秦宏宇.两轮平行电动车的数学模型建立和总体结构设计[j].硕士论文,2004.。