南方全站仪后方交汇操作步骤 PPT
- 格式:ppt
- 大小:2.17 MB
- 文档页数:19
1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
、角度测量(angle observation)1 (1)功能:可进行水平角、竖直角的测量。
AOB ,则:(2)方法:与经纬仪相同,若要测出水平角∠1)当精度要求不高时:HR 的大小。
瞄准 B 点,记下水平度盘瞄准 A 点——置零(0 SET )——)。
——可用测回法(method of observation set 2)当精度要求高时:)。
”(H SET 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘distance measurement )2、距离测量(测距、测坐标、放样前。
PPM 的设置——PSM 、PSM )的设置。
1)棱镜常数((国产棱镜)PRISM=0 (原配棱镜),-30mm 一般:(乘常数)的设置。
)大气改正数(PPM )2 PPM 的值。
PRESS ),或经计算后,输入输入测量时的气温(TEMP )、气压((全站仪镜点至棱镜镜点间高差及斜SD VD 和斜距1()功能:可测量平距HD 、高差距))。
(MEAS (2)方法:照准棱镜点,按“测量”coordinate measurement )3、坐标测量(。
H )X ,Y ,1()功能:可测量目标点的三维坐标((2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点 B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。

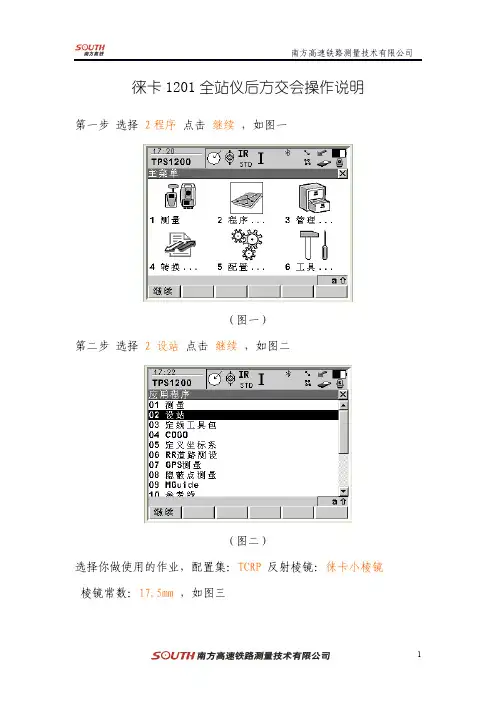
徕卡1201全站仪后方交会操作说明
第一步选择2程序点击继续,如图一
(图一)
第二步选择2设站点击继续,如图二
(图二)
选择你做使用的作业,配置集:TCRP反射棱镜:徕卡小棱镜棱镜常数:17.5mm,如图三
(图三)
点击配置进入配置菜单,自动定位选择:3D点击继续,如图四
(图四)
回到图三,点击继续,进入测站设置,方法选择后方赫尔墨特
输入测站号,仪器高输入0,选择好已知点所在的作业,已知点选择现在测量所有点点击继续,如图五
(图五)
进入下图点号处,选择你所需观测CPIII点的第一点,点击ALL,如图六
(图六)
观测完第一点后,在点号处选择第二点,手动照准第二点,
点击ALL如图七
(图七)
观测完第二点后,选择第三点点号,此时仪器会自动旋转到此位置,点击ALL即可,照此方法一直观测下去,直到后方交会8点完成,点击计算进入下图,如图八
(图八)
点击换页,进入下图如图九
(图九)
至此界面,如果Y、X、H 误差都小于1mm,点击设置,确认即可。
至此,全站仪后方交会工作完成。
全站仪后方交会法步骤和高程测量步骤集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-1、角度测量(angleobservation)?(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB,则:1)当精度要求不高时:瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。
2)当精度要求高时:——可用测回法(methodofobservationset)。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。
2、距离测量(distancemeasurement)?PSM、PPM的设置——测距、测坐标、放样前。
1)棱镜常数(PSM)的设置。
一般:PRISM=0(原配棱镜),-30mm(国产棱镜)2)大气改正数(PPM)(乘常数)的设置。
输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。
(1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS)。
3、坐标测量(coordinatemeasurement)?(1)功能:可测量目标点的三维坐标(X,Y,H)。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:?坐标:?若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有:高程:?(3)方法:?输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。
后方交会实施的操作步骤1. 准备工作在进行后方交会实施操作之前,需要进行一些准备工作,确保操作的顺利进行。
•确定需要进行后方交会的目标点和控制点,并准备好对应的坐标数据。
•确定适合后方交会操作的地点,保证操作的准确性。
•确保使用的测量仪器和设备处于正常工作状态,并进行必要的校准。
•关注天气状况和光线条件,确保进行测量的可行性。
2. 确定测量方案在进行后方交会实施之前,需要确定合适的测量方案,以保证操作的准确性和可靠性。
•根据实际情况选择合适的后方交会方法,如三角测量法或反方位角法。
•制定详细的测量计划,确定各个测量点的次序和测量路径。
•确定参考基准,如坐标系和坐标原点。
•设定测量精度要求,以确定工作中的误差限制。
3. 实施后方交会操作在完成准备工作和确定测量方案后,可以开始实施后方交会操作。
以下是具体的操作步骤:1.确定起始点和目标点,进入测量模式。
2.使用测量仪器进行距离测量,记录测量结果。
3.使用测量仪器进行方位角测量,记录测量结果。
4.根据测量结果计算辅助坐标点的坐标值。
5.根据辅助坐标点和目标点之间的关系,计算目标点的坐标值。
6.将计算得到的目标点坐标值与实际坐标进行比较,评估测量结果的准确性。
7.如有必要,进行数据处理和调整,以提高测量结果的精度。
8.记录测量结果,并保存相关数据和文档。
4. 结果验证与误差分析完成后方交会实施操作后,需要进行结果验证和误差分析,以评估操作的准确性和可靠性。
•将测量结果与实际坐标进行比较,计算测量误差。
•分析测量误差的来源和原因,如观测误差、仪器误差等。
•根据误差分析结果,评估测量结果的可靠性,并确定是否需要进行进一步的测量调整。
5. 结论与总结根据实际操作情况和误差分析结果,得出结论并进行总结。
•根据测量结果和误差分析,评价后方交会操作的准确性和可靠性。
•总结操作中遇到的问题和解决方法,以供后续实施参考。
•提出改进意见和建议,以提高后方交会操作的效率和精度。
后方交会
1、开机,在[建站]菜单中按[2]进入后方交会功能;
2、输入第一个点的点名按[回车]键输入此点坐标,输入完毕按[回车]键,输入目标高并按[回车]键。
照准第一个目标棱镜中心并按[测量1]或[测量2],启动3、用F
1
测量,显示测量结果,按[回车]键。
4、仪器转向第二个点,输入第二个点点名按[回车]键输入此点坐标,输入完毕按[回车]键,输入目标高并按[回车]键。
照准第二个目标棱镜中心并按[测量1]或[测量2],启动5、用F
1
测量,显示测量结果,按[回车]键或者重复步骤2-3增加更多的点。
按[回车]键仪器会计算出数据。
(按[添加]键可以添加点、按[查看]可以看参与的点信息也可以删除一些不好的点,按[翻页]键可切换结果对话框。
)
6、当成果好时,按[回车]或[记录]键记录此站。
7、后视点缺省为第一次观测的点,也可按[改变]键更换。
8、填好测站信息,按[回车]键记录测站和后视。
屏幕返回建站菜单。
全站仪后方交会法的具体操作步骤
开机后先按S.0键,输入文件名(也可跳过),确定,再按S.0键下翻,F2键选择新点,再按F2选择后方交会法,再选择一个文件,确定,自定义点名(可跳过),再F1距离后方交会,输入仪高,确定,在No1#界面里面选择坐标,输入第一个已知点的坐标,在已知点上架好凌镜,测量,再用同样的方法进行第二个点的操作。
然后再看残差大不大,不大可以进行计算,后面的就进行定位放线。
以南方全站仪为例:
放样--新点-后方交会法--- -输入点---回车---输入仪高--回车---输入A点已知坐标----输入棱镜高--测量距离---自动保----输入B点坐标---输入棱高----测量距离---自动保存---计算----记录---(完成)。
引用自南方全站仪NTS660系列使用说明书
5.6.4 确定新点
当现有控制点与放样点间不能通视时,需要设置新点。
在新点选择项中有两项功能用于采集坐标数据:极坐标法和后方交会。
当用极坐标法采集数据时,点号和坐标存储在一个作业中。
在用极坐标法采集数据时,观测员可以选择是否设置后视方位角。
软件提供了设置方位角和跳过该项选择两项功能。
注意:如果后视方位角是在放样中设置的,并且没有搬站且也没有关掉电源,便可以在用极坐标法采集数据工作中跳过设置后视方位角。
建议在用极坐标法采集数据前检查一下后视方位角。
一旦完成了设置后视方位角后,输入观测的点号和棱镜高且仪器瞄准棱镜便可采集该点的坐标数据。
将仪器安置在已知点上,用侧视法(极坐标法)测定新点坐标
【坐标数据】
F1 输入坐标数据
【确定新点】
F1 极坐标
【设置测站点】【设置方向值】【设置后视点】
【设置方向值】后视点
【设置方向值】
【确定新点—极坐标】
【确定新点—极坐标】
【确定新点—极坐标】
【确定新点—极坐标】
N:899.098 m
【确定新点—极坐标】
后方交会
后方交会程序从存储在作业中的两个已知坐标的点计算新采集点(测站点)的坐标。
会显示测站至每一已知点上测量的角度和距离,并显示平距和高差的残差。
如果软件不能计算新点的坐标,会显示“错误!”信息。
如接受显示的残差,下一屏幕便显示新点的坐标。
下面介绍计算后方交会点的坐标(将仪器安置在新点上)
【坐标数据】F1 输入坐标数据
【确定新点】F1 极坐标
【坐标数据】。
教你精确测准后方交会——详解后方交会具体操作步骤带图相信做过工程测量的测量员朋友,一定深有体会,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法。
因为传统的后方交会往往是以测角为主,但伴随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用,你比如隧道工程控制网往往由于隧道开工前测设完成,而洞口土石方施工完毕后,需补设洞口投点,以便控制隧道轴线,测设投点就要用到后方交会法;深水桥墩放样测量中的墩心定位也可以应用此法,还可用来测定施工控制导线的始终点等。
目前,全站仪已逐渐普及,利用全站仪可以方便地同时测角和边,因此在实际工作中,就存在测边、测角、边角同测后方交会坐标计算问题以及它们的精度评定问题。
下面就要为广大测工朋友具体介绍下后方交会具体操作步骤:一、全站仪后方交会的原理:如图所示,P点为后方交会点,ABC是控制网中的已知点,通过测量边长L1、L2、L3,角度α、β、γ,应用解析公式,即可计算出P 点的坐标。
二、前方交会法和后方交会法前方交会:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):二、后方交会操作步骤:1、架设仪器2、打开后方交会功能,按照提示,分别测量距离,角度数据3、计算结果三、如何得到的坐标更准?1、角、边的关系,距离要大致相等且最好不要太近,角度最好是在30°至120°之间;2、适当增加观测数量,不管是距离交会还是角度交会都是条件越充分精度就越高,推荐8个点的自由建站;3、校核仪器的精度能不能满足标称的精度,经常保养仪器;4、格网因子改为1;。
全站仪后⽅交会的使⽤操作⽅法
关于750全站仪⾃由设站(后⽅交会)的操作⽅法:
1、开机、整平、对中
2、按MENU进⼊菜单健,按F1进⼊应⽤程序,再按F3进⼊“⾃由设站”程序
这⾥F1设置作业是为了当⾃由设站操作完成后,可以直接
进⾏测量,也便于数据存到指定作业⾥。
F2设置限差也就是充许计算出来的数据的⼀个误差,可以
选择打开或关闭
3、按F4开始进⾏测站点设置,这⾥主要是对点名和仪器⾼的设置
4、设置⽬标点进⼊设置
第⼀种⽅法,就是仪器⾥已经把⽬标点坐标输⼊到了
仪器⾥⾯,只需要输⼊点名和棱镜⾼点确认完成设置。
第⼆种⽅法,就是现场输⼊坐标,需要F4翻页再按
F1坐标输⼊完成确认完成设置。
特别说明⼀点就是⾼程不能输0,如果真遇到⾼程是0的情况
下,输成0.001⽶,因为输⼊0怕计算错误。
5、设置完成后就进⼊测量界⾯
对准⽬标点按F3测存即可,然后按F2下⼀点进⾏⽬标点设置,然后再测量,对两个及以上的⽬标点设置测量好后在测量界⾯,按F1结果就可以显⽰测站点坐标
完了确认后就可以进⾏测量采集等⼯作啦。
长沙三⿍测绘黄昌洪
QQ:54388778
有机会⼤家多多沟通⼼得。