机器人通信介绍与IO回顾
- 格式:pptx
- 大小:6.74 MB
- 文档页数:19
A J A机器人的I O通信集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]A B B[a]-J-4A B B机器人的I O通信4.1任务目标了解ABB机器人I/O通信的种类。
掌握常用ABB标准I/O板的配置。
掌握Profibus适配器与PLC进行通信的配置方法。
4.2任务描述以ABB 标准I/O板DSQC651为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4位)、组输出信号GO1(4位)和模拟输出信号AO1,并实现I/O信号的监控及操作。
除了通过ABB机器人提供的标准I/O板进行与外围设备进行通信以外,ABB机器人还可以使用DSQC667模块通过Profibus与PLC进行快捷和大数据量的通信。
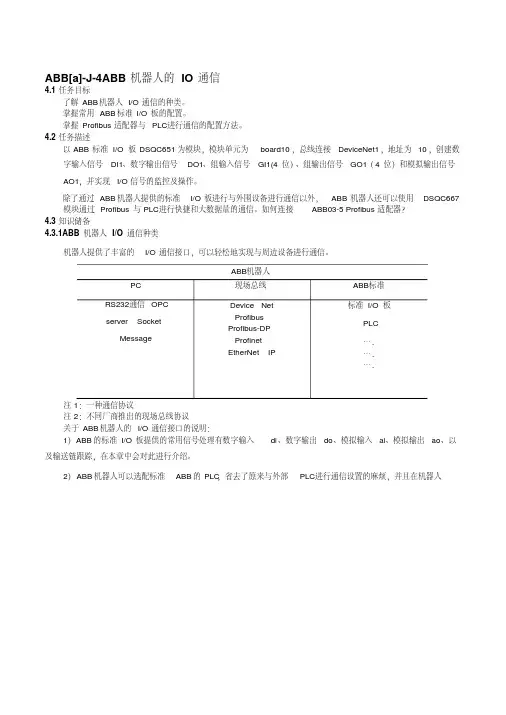
如何连接ABB03-5Profibus适配器?4.3知识储备机器人I/O通信种类机器人提供了丰富的I/O通信接口,可以轻松地实现与周边设备进行通信。
ABB机器人PC现场总线ABB标准RS232通信OPCserver SocketMessage1DeviceNet2Profibus2Profibus-DP2Profinet2EtherNetIP2标准I/O板PLC….….….注注2:不同厂商推出的现场总线协议关于ABB机器人的I/O通信接口的说明:1)ABB的标准I/O板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB机器人可以选配标准ABB的PLC,省去了原来与外部PLC进行通信设置的麻烦,并且在机器人示教器上就能实现与PLC相关的操作。
3)在本章中,以最常用的ABB标准I/O板DSQC651和Profibus-DP为例,进行详细的讲解如何进行相关的参数设定。
IRC5控制柜接口说明:标号说明A附加轴,电源电缆连接器(不能用于此版本)B FlexPendant连接器C I/O连接器D安全连接器E电源电缆连接器F电源输入连接器G电源连接器H DeviceNet连接器I信号电缆连接器J信号电缆连接器K轴选择器连接器L附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:标准I/O板本节将介绍常用的ABB标准I/O板(具体规格参数以ABB官方最新公布为准)。


ABB[a]-J-4ABB 机器人的IO 通信4.1 任务目标了解ABB 机器人I/O 通信的种类。
掌握常用ABB 标准I/O 板的配置。
掌握Profibus 适配器与PLC 进行通信的配置方法。
4.2 任务描述以ABB 标准I/O 板DSQC651 为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4 位)、组输出信号GO1(4 位)和模拟输出信号AO1,并实现I/O 信号的监控及操作。
除了通过ABB 机器人提供的标准I/O 板进行与外围设备进行通信以外,ABB 机器人还可以使用DSQC667 模块通过Profibus 与PLC 进行快捷和大数据量的通信。
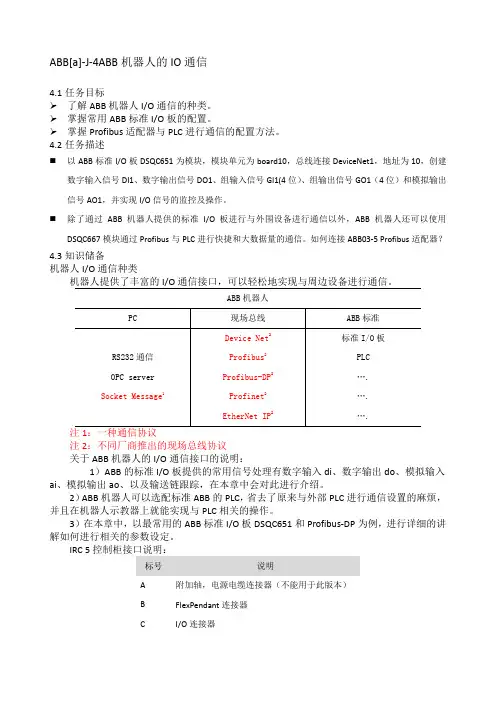
如何连接ABB03-5 Profibus 适配器?4.3 知识储备4.3.1ABB 机器人I/O 通信种类机器人提供了丰富的I/O 通信接口,可以轻松地实现与周边设备进行通信。
ABB 机器人PC现场总线ABB标准RS232通信OPC server SocketMessageDevice NetProfibusProfibus-DPProfinetEtherNet IP标准I/O板PLC….….….注1:一种通信协议注2:不同厂商推出的现场总线协议关于ABB 机器人的I/O 通信接口的说明:1)ABB 的标准I/O 板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB 机器人可以选配标准ABB 的PLC,省去了原来与外部PLC 进行通信设置的麻烦,并且在机器人示教器上就能实现与PLC 相关的操作。
3)在本章中,以最常用的ABB 标准I/O 板DSQC651 和Profibus-DP 为例,进行详细的讲解如何进行相关的参数设定。
IRC 5 控制柜接口说明:标号说明A 附加轴,电源电缆连接器(不能用于此版本)B FlexPendant 连接器C I/O 连接器D 安全连接器E 电源电缆连接器F 电源输入连接器G 电源连接器H DeviceNet 连接器I 信号电缆连接器J 信号电缆连接器K 轴选择器连接器L 附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:4.3.2ABB 标准I/O 板本节将介绍常用的ABB 标准I/O 板(具体规格参数以ABB 官方最新公布为准)。
ABB[a]-J-4ABB机器人的IO通信4.1任务目标了解ABB机器人I/O通信的种类。
掌握常用ABB标准I/O板的配置。
掌握Profibus适配器与PLC进行通信的配置方法。
4.2任务描述⏹以ABB标准I/O板DSQC651为模块,模块单元为board10,总线连接DeviceNet1,地址为10,创建数字输入信号DI1、数字输出信号DO1、组输入信号GI1(4位)、组输出信号GO1(4位)和模拟输出信号AO1,并实现I/O信号的监控及操作。
⏹除了通过ABB机器人提供的标准I/O板进行与外围设备进行通信以外,ABB机器人还可以使用DSQC667模块通过Profibus与PLC进行快捷和大数据量的通信。
如何连接ABB03-5 Profibus适配器?4.3知识储备机器人I/O通信种类机器人提供了丰富的I/O通信接口,可以轻松地实现与周边设备进行通信。
ABB机器人注2:不同厂商推出的现场总线协议关于ABB机器人的I/O通信接口的说明:1)ABB的标准I/O板提供的常用信号处理有数字输入di、数字输出do、模拟输入ai、模拟输出ao、以及输送链跟踪,在本章中会对此进行介绍。
2)ABB机器人可以选配标准ABB的PLC,省去了原来与外部PLC进行通信设置的麻烦,并且在机器人示教器上就能实现与PLC相关的操作。
3)在本章中,以最常用的ABB标准I/O板DSQC651和Profibus-DP为例,进行详细的讲解如何进行相关的参数设定。
IRC 5控制柜接口说明:标号说明A 附加轴,电源电缆连接器(不能用于此版本)B FlexPendant连接器C I/O连接器D 安全连接器E 电源电缆连接器F 电源输入连接器G 电源连接器H DeviceNet连接器I 信号电缆连接器J 信号电缆连接器K 轴选择器连接器L 附加轴,信号电缆连接器(不能用于此版本)控制柜接口示意图:标准I/O板本节将介绍常用的ABB标准I/O板(具体规格参数以ABB官方最新公布为准)。
ABB机器人的各种通信运用方式一、一般介绍针对工业机器人,我们一般会关注两个方面:1、运动性能:直接决定了机器人是否能够用于特定的工艺, 比如精度和速度。
2、通信方式:直接决定了机器人能否集成到系统中,以及支持的控制复杂度。
通常,机器人支持的通信方式有:2.1普通IO:a)iSignalb)i Group signal本地IO模块,是机器人控制柜上最常见的模块之一,或者说是默认必备的模块。
常见的有8输入和8输出,或者16输入和16输出;以模拟量的0V和24V,作为数字控制中的0和1。
在小型系统中,用来快速地连接电磁阀以及传感器,实现夹具等控制,是再方便不过的了。
在较复杂的IO应用中,可以使用cross-function将数个IO信号通过固定的逻辑关系组合在一起,通过一个IO信号来控制。
用类似伪代码的方式举例:set do_1 = set do_2 & reset do_3。
此外,ABB机器人控制柜,其本地IO的参考电平可以从外面接入,以便满足客户整个控制系统等电平的要求。
在较少的情况下,可以将数个单独的IO信号合并为一个group(组),用于传输较为复杂的信号,比如数字,这种情况就类似于二进制数。
比如4个IO 组合在一起为0100(如二进制数), 就相当于表示4(十进制数)。
其实这种用法并不推荐,一方面,IO数量有限,能够传递的信息的数量和复杂度都受到很大的限制;这时候就推荐使用总线以获得较多的IO信号,当然*优的方式是使用后面提到的基于网络(非总线的TCP/IP)的方式。
2.2总线:a)Profinetb)iProfibusc)DeviceNetd)EthernetIP等工业总线,从系统的角度,是用于不同工业设备之间通信的可靠接口,比如机器人和PLC的通信;从控制方式的角度,是作为普通IO的扩展。
是否使用总线,以及使用何种总线,一般取决于系统中除机器人系统之外的设备能够支持的通信方式。
IRC5 Compact及io配置介绍1.控制柜硬件介绍
柜子尺寸
下面的图示描述了IRC5 Compact 控制器前面板上的按钮和开关
下面将详细介绍IRC5 Compact 上的连接接口
Compact Controller 上的FlexPendant 连接器位于控制器前部
下图显示了计算机的概况
注意事项
将串行信道连接到控制器
安全接口
Io模块
柜内硬件Sd卡
Usb插口位置
现场总线定义
安装SafeMove 的Safety module DSQC1015
维护计划IRC5 Compact控制器柜子硬件图介绍
Xs16电路图
Xs17/xs18 DSQC652电路图
DSQC651电路图
安全xs7/xs8/xs9 Xs7/xs8
Xs9
2.IO配置过程,举例DSQC652模块添加
1.查看选项必须带709-1选项
2.点击主菜单,选择控制面板
3.选择配置
4.选择主题io
5.选择devicenet devicer
6.添加io模块
7.修改通讯地址(主机自带模块默认地址是10)
8.点击确认,然后重启
9.重启结束,点击主菜单选择输入输出查看通讯是否已连接
10.如已连接,即可在io中添加信号3.添加io信号
1.点击主菜单,选择控制面板
2.选择配置
3.选择主题io
4.选择devicenet devicer
5.选择signal即可在里面添加io信号。