Robcad学习资料
- 格式:ppt
- 大小:4.66 MB
- 文档页数:61
最基本的操作过程Robcad通常要创建两个文件夹,一个为Library;一个为Project。
Library一般存放固定的、不可更改的文件,比如:机器人,车型,测点,围栏,工装,水泥台等等。
Project一般存放的都是Library里的,在Robcad里可以被更改的文件。
Project里的文件可以更改过后,再放回Library文件里当库文件。
注:两个文件夹(包括两个文件夹)下的所有文件名必须是英文,中文不识别。
还有就是创建一个项目的时候最好是在Simulation文件夹下如:Simulation\jin\project或Simulation\jin\library。
以下是本行业使用Robcad的过程:1:打开软件在Robcad界面下,点击Setup,弹出Setup窗口→点击Project→Define→在Project name:填写项目名称→在Path:项目所在的Project的路径→点击Accept确认。
(这一步叫做“定义路径”)→点击Set library root(创建库的根目录)→删掉Filter,selection两栏中的内容,在Directories栏中找到项目的1Library路径,点击Filter键并确认。
创建好之后,点击Configuration→Store→User Project (保存)。
2:在Robcad界面下,点击Project→找到项目名称并点击进入。
弹出Layout窗口,点击Store as(另存) →在弹出窗口里填写另存名(这个时候Project文件下会出现-另存名的文件夹)。
在Layout窗口下点击Get component(获得组件),然后在Get component找出需要使用的诸如车型,机器人等等的组件。
将不需要的项目去掉,在Robcad界面下点击Setup→弹出Setup窗口→点击Projects→再点击Cancel选择要去掉的项目。
Sensor的安装方法(机器人关联Sensor)1.将传感器安装到机器人上在robcad界面下,点击上方工具栏中按钮Robcad,出现下拉菜单选择Workcell,在右下方出现工具框,选择Motion按钮,出2现Motion对话框,选择setting。

【新提醒】认识Robcad软件的数据类型与数据结构,数据存
放结构,文件夹命名规...
认识Robcad 软件的数据类型与数据结构,数据存放结构,文件夹命名规 ...
2015-12-3 17:00| 发布者: robot| 查看: 165| 评论: 1|原作者: robotjc|来自: 【Robcad 基础篇】
摘要: 第一点:认识Robcad 软件的数据类型与数据结构Robcad 软件使用的数据格式与传统软件有,第二点:认识Robcad 软件的数据存放结构。
主要有.ce第三点:Robcad 软件的文件夹命名规则..
第一点:认识Robcad 软件的数据类型与数据结构
Robcad 软件使用的数据格式与传统软件有很大的差异,Robcad 数据类型主要是文件夹的存放,通过后缀名进行区分。
主要有.ce和.co两种后缀名,如下图:
:.co类似于CATIA软件中的Part零件文件,三维数据就存放在这里,每一个.co的文件夹就是一个3D数模;
:.ce类似于CATIA软件中的Product产品文件,这么没有存放三维数据,存放的是每个.co的逻辑关系,我们进行的仿真等操作就是在.ce里面进行的。
第二点:认识Robcad 软件的数据存放结构
Robcad仿真项目的文件夹中主要有两个文件夹,一个project 【项目文件夹,存放.ce文件】、一个library【库文件夹,先创建数据类型文件夹,用于存放.co文件】。
第三点:Robcad 软件的文件夹命名规则
Robcad软件的文件夹命名不能使用字符:空格;中划线;文件的存储路径不能有中文字符;首字母开头不能使用大写字母、数字和符
号;
Robcad软件的文件夹命名可以使用字符:首字母为小写字母;下划线;。
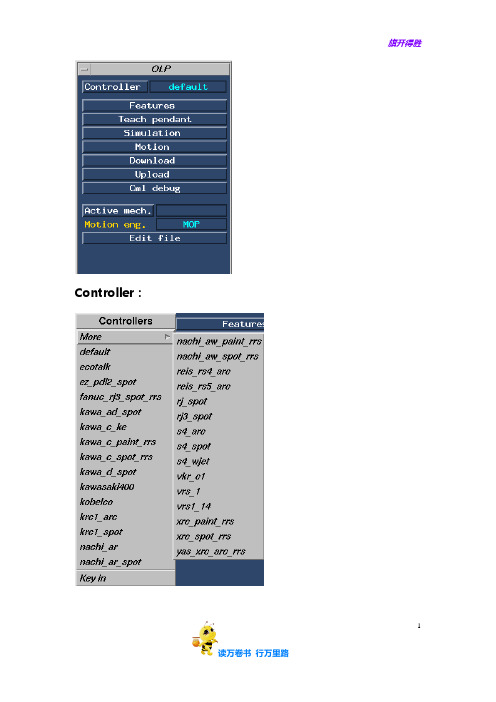
Controller:
1
Features:
Create:创建新程序,Porgramme name程序名,Programme members程序所包含的路径和点位。
Query:查询程序内容,从程序列表中选择所需要查询的程序,会显示出程序所包含的路径和点位。
Delete:删除程序,从程序列表中选择所需要删除的程序,Porg only仅删除程序,Prog path删除程序和路径,Prog path loc删除程序、路径及点位。
Add:添加程序,从程序列表中选择所需要添加的程序,Proram name程序名,Obj name路径或点位,Bofore/After选择添加的位置,New program menbers需要添加的路径或程序名。
Extract:从程序中移除路径或点位,Program name程序名,Path or loc name 需要移除的路径或点位名。
2
3。

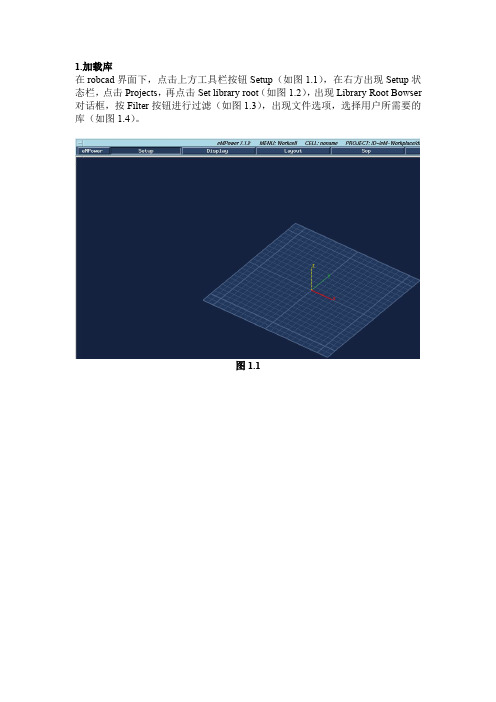
1.加载库在robcad界面下,点击上方工具栏按钮Setup(如图1.1),在右方出现Setup状态栏,点击Projects,再点击Set library root(如图1.2),出现Library Root Bowser 对话框,按Filter按钮进行过滤(如图1.3),出现文件选项,选择用户所需要的库(如图1.4)。
图1.1图1.2图1.3图1.42.加载车模在robcad界面下,点击上方工具栏按钮eMpower,出现下拉菜单选择Workcell (如图2.1)或者点击工具栏中按钮Layout(如图2.2),在右方出现Layout状态栏,点击Load cell(如图2.3),出现Load Cell对话框,选择用户所需要的车模(如图2.4)。
注:有时Cells框中无选项出现,按Thumbnails。
,出现选择对话框,选择用户所需要的车模(如图2.5)。
图2.1图2.2图2.3.图2.4图2.53.在画面中加入机器人在robcad界面下,点击上方工具栏按钮Layout(如图3.1),在右方出现Layou 状态栏,点击Get component(如图3.2),出现Get Component对话框,选择Libraries,选择用户所需要的机器人,Locate At:选择机器人位置,Instance Name:输入机器人名字(如图3.3)。
点击Locate At后的Position,出现Position对话框,点击Values,输入机器人所在位置的数据(如图3.4)。
图3.1图3.2图3.3图3.44.画面操作在robcad界面下,滚动鼠标中键滚轴拉远近视距,按住鼠标右键拖动进行画面的平移,同时按住鼠标中键+右键拖动进行画面的翻转。
5.控制机器人的运动在robcad界面下,点击上方工具栏中按钮eMpower,出现下拉菜单选择Workcell (如图5.1),在右下方出现工具框,选择Motion按钮(如图5.2),出现Motion 对话框(如图5.3),可按不同的坐标对机器人进行运动控制,点击Active mech,出现Mechanisms对话框(如图5.4),可选择机器人,点击编号或直接从界面中选择机器人。
第六章:其他选择主题描述eM-Workplace中的其他重要主题(如CAD集成)将在本章中进行介绍。
本章涵盖的主题。
使用eM-Workplace进行CAD集成简介。
I-DEAS与eM-Workplace集成。
用于CAD界面的独立GUI(翻译)。
数据菜单CAD翻译。
纹理映射。
更多数据命令Windows第1课:CAD集成(CI)能够链接到CADDS5,UG,Pro-E,I-DEAS和CATIA零件CAD集成(CI)是将其他CAD系统的数据导入eM-Workplace的更简洁的方式。
这是因为原来的CAD模型从来没有被翻译成eM-Workplace。
使用CI,将原始CAD模型作为组件读取并显示在eM-Workplace中。
与转换的组件不同,集成组件只是原始CAD数据的阴影。
因此,这个组件的“几何形状”是不能改变的,但是可以添加运动学。
什么是CAD集成答案?- 继续与产品数据相关联- CAD独立的电子制造环境- 访问产品组装树- 多个CAD系统环境- 沟通过程信息反馈- 通知设计问题- 初步设计链接- 快速准确地访问产品数据CAD集成优势- 使用“一流的”CAD和电子制造解决方案- 启用并行工程- 如按需设计审查- 尽早开始流程研究- 没有数据翻译或重复- 降低数据管理成本- 没有精确的损失- 属性,几何和装配链接CAD集成优势摘要- 提供快速和准确的程序- 允许并行工程- 降低数据管理成本EDS UG CI状态平台: HP / SGI / SUN应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINEUG版本:11,13, 15Dasault CATIA CI状态平台:IBM / HP / SUN / SGI应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINECATIA版本:4.1.6 - 4.2.0(PTC)CV CADDS CI状态平台:HP / SGI / SUN应用:SPOT,DYNAMO,MAN,DRILL,CMM,FIXTURES,LINE CADDS版本:6,7,8,9SDRC I-DEAS CI状态平台:HP / SGI / SUN / IBM应用:SPOT,DYNAMO,MAN,DRILL,FIXTURES,LINEI-DEAS版本:MS6,MS6a,MS7参数技术PRO-E CI状态平台:HP / SGI / SUN应用:SPOT ,DYNAMO ,MAN ,DRILL ,CMM ,FIXTURES ,LINEPRO-E 版本:18,19,20,2000i工业过程 CAD 集成的概念1基于同步数学的制造业 Level of Computeriz ation, CAEFactory eManufacturing Tools AutomationProduc tion Production Production Desi gn Engineerin gCAD 集成的概念2 CAD SystemEnviron ment Math Data and AtributesRO BCAD Envi ronmentConcurrent Access基于同步数学的制造业CAD 集成与 CAD 翻译的区别CAD 翻译(CAD 界面) +/-可以修改翻译的部分 + 需要较少的CAD 许可证 for Several CAD Sys tems in One CellEDS UG Dasault CATIAROBCAD Environm entCV CADDS5 SDRC I−DEAS- 打破了CAD模型和eM-Workplace模型之间的联系- 可能无法获得CAD模型的100%- 占用比CAD集成更多的磁盘空间CAD集成(CAD链接)+ / - 只读部分- 需要更多的CAD许可证+ 维护CAD模型和eM-Workplace +之间的“实时”链接查看在CAD 系统中查看CAD模型的100%+使用大约60%的磁盘空间(不重复数据)同一单元中的多个CAD集成部件用户现在可以将CADDS5,UG和CATIA,I-DEAS和Pro-E的CAD集成零件放在同一个单元中。
第4章:处理描述现在,我们将利用前三章所获得的知识来设置自己的路径,并使用eM-Workplace 库结构。
本章涵盖的主题· 逆向运动学:eM-Workplace的核心技术。
使用路径。
填充库。
从最少约束到最多约束第1课:逆运动学:e M-Workplace的核心技术原则定义机构/设备具有运动学的组件eM-Workplace Robot 在 运动链的末端创建一个TOOLFRAME 并编译(定义)该机制将使一个简单的运动学设备安装到eM-Workplace 机器人(或CMM )中。
放置编辑器“放”命令放在“源”的方向:将一个对象从源帧放到目标帧。
- >将对象从源框架移动到目标框架 - >对象的方向不受影响(保持源框架的方向) 以“目标”为导向:将一个对象从源框架到目标框架。
- >将对象从源框架移动到目标框架。
- >对象的方向改变为目标框架 Joint Angles Direct Kinematics Position and orientation of theend−effectorInverse KinematicsLink ParamtersLink ParamtersJoint Angles INPUTINPUTOUTPUT直接运动学直接运动学如何工作:1. 给eM-Workplace 一个状态/姿势。
状态/姿态包含机构的每个关节的确切值。
当前位置的 目标姿势J1 = 0 J1 = 10J2 = 10 移动到姿势J2 = 120J3 = 0 J 3 = 100J4 = 15 J4 = 45J5 = 40 J5 = 32J6 = 20 J6 = 462. eM-Workplace 将机制从当前位置移动到目标位置- 易于使用eM-Workplace ,因为eM-Workplace 已经知道联合价值- 直接运动学可用于任何运动装置,如枪支,夹具,机器人等。
逆运动学逆向运动学如何工作:1. 给eM-Workplace 一个位置。