采煤机远程监控及故障诊断系统
- 格式:docx
- 大小:122.68 KB
- 文档页数:3
1201 概述在煤炭企业生产中,采煤机是煤矿生产的主力设备,采煤机工作环境十分恶劣,在运转时受到来自煤、岩石等巨大的冲击载荷,还受到煤尘、水雾等其他方面的污染。
尽管采煤机在设计之初已充分考虑了防止水分及其他污染物侵入油液,但在实际工作中,采煤机的油液经常遭受污染,导致采煤机的液压元件和机械零件过早磨损,达不到使用寿命的情况时有发生。
采煤机是煤矿生产的主力设备,是影响煤矿产能效益的主要因素,其可靠、稳定的运行是生产顺利进行的重要保证。
而采煤机如因故障停机,则将造成整个煤矿生产系统的瘫痪。
因此,需要建立一套完整的故障诊断系统来准确描述采煤机的运行状态,并对故障进行诊断和预报,以增大采煤机的开机率,提高其可靠性,保证工作面的高效高产。
除了对采煤机进行实时监控,掌握运行情况,更需要对监控信号进行故障分析,及时判断是否存在安全隐患,以确保采煤机的无故障运行,尽量避免因采煤机故障停机带来的损失。
2 采煤机系统参数2.1 采煤机机械部分概述采煤机在煤矿生产中的作用是不可忽略的,采煤机的故障诊断尤其重要,掌握其诊断办法对生产任务十分重要,要掌握其故障诊断方法首先应了解其性能。
现以河南永华能源嵩山煤矿的综采设备为例系统介绍MG132/320-WD型电牵引采煤机。
此MG132/320-WD型电牵引采煤机是鸡西煤矿机械有限公司自主开发研制的中等功率低采高的交流电牵引采煤机。
主要用于厚度1.5~2.86米、煤层倾角小于35°、煤质中硬、顶板中等稳定、底板起伏不大、不过于松软的综合机械化采煤工作面,完成落煤与装煤作业。
用于高档普采工作面时,采高范围为1.3~2.86米。
可在周围空气中的甲烷、煤尘、硫化氢、二氧化碳等不超过《煤矿安全规程》中所规定的安全含量的矿井中使用。
整体为多部电机横向布置,电控系统为机载式,采用计算机控制技术。
2.1.1 采煤机主要特点。
主要指标:可用于高档普采工作面,又可用于综合机械化采煤工作浅析采煤机故障及诊断方法张建伟 张长合(河南煤化集团永华能源嵩山煤矿,河南 洛阳 471924)摘要:采煤机是一个集机械、电气和液压为一体的大型复杂系统,工作环境恶劣,如果出现故障将会导致整个采煤工作面的中断,造成巨大的经济损失。
第1期(总第125期)机械管理开发2012年2月No.1(S UM No.125)M EC HANIC ALM ANAGEM ENT ANDDEVELOPM ENTFeb.2012引言我国是煤炭大国,矿产资源极为丰富。
目前,各省为了提高矿产资源利用率、保证煤矿安全生产、提高煤矿机械自动化程度,已经开始了大规模的煤炭资源整合和煤矿兼并重组工作,即所有的小煤矿将淘汰,全部实现机械化开采。
机械化开采,关键就是要实现综采工作面的自动化,从而实现煤矿安全、高效生产。
采煤机作为综采工作面落煤和装煤的主要设备,它的正常运转决定着综采工作面的效率。
但是,由于工作环境恶劣,采煤机零部件多,结构复杂,操作工人不能及时掌握采煤机的各项运行参数,致使采煤机发生故障后,才进行维修,这样往往会给生产造成较大损失,同时也会影响到煤炭企业的发展速度、经济效益和安全生产。
采煤机现行的维修体制及事后维修的技术落后状况,已不适应煤炭企业的现代化建设和安全生产的需要,应必要进行改进。
当前采煤机的维修存在着严重的不足,要克服这些不足,必须采用先进的远程监控系统对煤矿设备进行远程监测,一经发现煤矿的各项运行参数出现异常,就立即通知井下工人及时处理。
要保证采煤机的安全运行最重要的就是要做到事前故障的监测,因此,设计一套基于GPRS 的采煤机远程监控系统的硬件和软件系统;同时,还要有保证采煤机能够高效运行的措施。
设计了基于GPRS 的采煤机远程监控系统的硬件和软件系统。
同时,还提出了一些要保证采煤机的高效运行今后应该采取措施的思路。
1采煤机传统维修的弊端及远程监测的意义1.1传统维修的弊端在采煤机维修方式的发展过程中,主要有事后维修、定期维修、预防性维修、预知性维修、主动预防性护维修五类。
传统采煤机维修,大部分是事后维修。
事后维修顾名思义是指当采煤机发生故障损坏后采取的被迫停机而进行的毫无事先计划的应急维修。
故障发生后采取的处理对策,属于被动性的。
电气自动化在煤炭领域的应用发展在煤炭开采过程中,采煤工艺技术直接决定了矿井的生产能力,随着电气自动的化的快速发展,电气自动化在煤矿领域的应用越来越广泛,越多越多的煤矿机电设备的自动化工艺更加先进、自动、安全。
因此,提高采煤工作面的电气设备的自动化程度,可以有效的提高煤矿生产的安全正常进行。
文章通过结合当前的煤矿机电设备的发展情况,对电气自动化控制技术在煤炭领域机电设备的应用进行了简单的分析,从而进一步推进煤矿的安全高效开采。
标签:煤炭开采;电气自动化;应用1 概述在煤炭开采过程中,采煤工艺技术直接决定了矿井的生产能力,同时生产设备也是矿井安全高效开采的重要因素。
生产设备先进性、自动化、安全性,更多的由生产设备的电气自动化水平决定,电气自动化技术在煤矿开采过程中占有重要的作用,进一步推进煤矿安全高效的开采。
虽然目前我国的生产机械设备自动化技术较上个世纪煤炭开采技术有了很大的提高,但是与一些先进的采煤发达国家相比,我国的电气自动化水平在煤炭领域的应用还是很少,而且应用规模不大,煤矿生产机械设备的电气化调试还处于研发过程中,关键设备仍需要引进,总体而言我国的煤炭生产机械设备的电气化技术仍处在一个落后的阶段。
所以,在当前煤矿事故不断的情况下,只有当电气自动化在煤矿领域更深入广泛的应用,提高电气设备的自动化水平,以及工作人员操作技能及自我安全意识,才能保证工作人员的生命安全,降低工人的劳动强度,最终实现无人机械化开采。
所以,如何提高电气设备的自动化水平、工作人员的操作技能成为了矿井安全管理的一个重要内容。
2 采煤工作面综合机械化采煤技术采煤工作面综合机械化采煤技术是指工作面的采煤、运输、支护的过程全部自动机械化,采煤工作面综合机械化采煤技术在目前而言,较普通机械化开采、炮采而言,是一种先进的采煤工艺,大大减轻了工作人员的劳动力度,提高了工作人员的安全性,提高了工作面的生产能力,使得采煤工作面的生产效率得到提高。
煤矿综采工作面设备状态综合监测及故障预警系统研究与应用摘要:近几年,随着社会经济的高速发展和科学技术的不断进步,智能化技术也渗透到了社会的各个领域。
比如在煤炭行业,将智能化技术运用到煤炭开采中,极大的提高了煤炭开采的效率。
现阶段我国的煤炭开采已经全部实现了机械化作业,以前比较传统的煤炭开采方式已经满足不了现在的行业发展趋势,运用智能化开采技术可以运用开采设备对煤层和参数进行详细的分析研究,并且智能化开采技术的安全系数比较高,可以避免很多意外。
所以,运用先进传感、检测监控技术、可视化技术、5G融合网络等智能化开采技术是现在煤炭行业的主要发展方向,为煤炭行业智能化发展提供了强有力的技术保障。
基于此,本篇文章对煤矿工作面设备状态综合监测及故障预警系统研究与应用进行研究,以供参考。
关键词:煤矿工作面;设备状态综合监测;故障预警系统;研究与应用引言我国是煤炭大国,煤炭也是我国最重要的能源之一,我国现在还处于工业发展的时期,在以后的很长一段时间内,煤炭依旧是重要的世界能源,并且有着不可替代的主要地位。
现代化信息技术的高速发展对煤炭行业也产生了很大的影响,煤炭行业想要继续发展下去,就必须顺应时代的发展趋势,运用智能化技术来促进煤炭行业的发展。
基于此,本文探究煤矿工作面设备状态综合监测及故障预警系统研究与应用分析。
1煤矿综采智能化工作面的技术特点1.1自动化控制提升准确性在煤矿综采工作的实际操作过程中,应该运用自动化控制系统对开采工作进行控制,比如说运用采面支架自动化和降尘自动化系统等技术来实现煤矿开采自动化。
智能化控制设备不同于以往的人工控制,它是通过计算机系统来实现智能化的系统控制,大大降低了工作人员的工作强度,同时也提高了煤矿综采运行的效率和准确性,降低错误率。
1.2参数监控确保实时性煤矿智能化系统拥有强大的计算能力,将智能化系统和设备运用到煤矿综采作业,可以有效的提高煤矿开采参数的准确性,从而实现煤矿综采的智能化监管目标。
基于广域搜索算法的采煤机故障智能诊断系统郭亨经【摘要】采煤机故障诊断专家系统获取知识,有一定的难度,为此通过该系统并综合使用扩展故障树分析,在扩展故障树的基础上提出采煤机故障诊断专家系统知识获取方法.相对于传统的故障树节点,增加了节点类型、重要度等内容,所得到的故障树有扩展性,把其中的相关节点信息转变为有一定规范性的专家系统知识.在推理过程中,重点使用广度搜索,将深度和广度搜索相结合,从而能高效、准确的查找各类故障.【期刊名称】《煤矿现代化》【年(卷),期】2018(000)004【总页数】3页(P119-121)【关键词】采煤机;故障诊断;扩展故障树;专家系统;数据库【作者】郭亨经【作者单位】山西凯嘉能源集团有限公司,山西介休 032000【正文语种】中文【中图分类】TD421.61 引言随着煤炭开采业的快速发展,需要各种现代化采煤设备,其中采煤机是一项关键性设备,它的构造比较复杂,分为机械、液压以及电控等部分。
采煤机运行当中要面临由裁决活动产生的冲击载荷、煤尘水汽的污染及侵蚀,伴随产生的瓦斯也会对其产生不利影响,导致采煤机经常发生故障,不利于设备的正常使用。
采煤机要承受巨大的负载,所处的工作条件极其恶劣,再加上需要连续不断的运转,并配备各种各样的机电液设备,由此导致采煤机经常出现各种故障,并有随机性。
对采煤机的故障实施分析和研究,才能确保采煤机能顺利运行。
在以前,诊断采煤机的故障,主要是工作人员在现场通过自己的专业理论及时间经验进行处理。
所以,充分运用最新技术来及时、准确的诊断出采煤机的故障,提出针对性的解决之策,将停机损失降到最低,这对于采煤工作面高效生产有巨大价值。
所以,通过分析牵引部这一采煤机核心部分,综合使用扩展故障树分析法和故障诊断专家系统方法,设计出基于扩展故障树的采煤机牵引部故障诊断专家系统。
使用该系统,以前的采煤机故障诊断专家系统不能获取丰富知识、信息面窄的问题都迎刃而解,最终实现能稳定、高效的诊断采煤机故障。
《采煤机智能调高控制理论与技术》篇一一、引言采煤业作为国家经济发展的重要支柱,随着技术的进步,传统的人工操作模式逐渐向智能化和自动化方向转变。
在采煤过程中,智能调高控制技术尤为重要,因为它直接影响着煤炭的开采效率和安全。
本文将探讨采煤机智能调高控制的理论基础、技术发展及其在实践中的应用。
二、采煤机智能调高控制理论基础1. 控制系统架构采煤机智能调高控制系统主要由传感器、控制器和执行器三部分组成。
传感器负责实时感知采煤机的位置、速度、负载等信息;控制器则根据这些信息做出决策,并通过执行器实现控制。
这种闭环控制系统可以保证采煤机在各种工况下都能稳定运行。
2. 控制算法智能调高控制算法是采煤机控制系统的核心。
常见的算法包括PID控制、模糊控制、神经网络控制等。
这些算法可以根据采煤机的实际工况,实时调整控制参数,以达到最佳的开采效果。
三、采煤机智能调高控制技术发展1. 传感器技术传感器是采煤机智能调高控制系统的关键组成部分。
随着技术的发展,传感器逐渐向高精度、高稳定性的方向发展。
例如,激光雷达、红外传感器等的应用,使得采煤机能够更准确地感知周围环境。
2. 控制器技术控制器是采煤机智能调高控制系统的“大脑”。
随着计算机技术和人工智能技术的发展,控制器逐渐向高性能、高集成度的方向发展。
例如,采用FPGA(现场可编程门阵列)的控制器可以实现更快的处理速度和更高的可靠性。
3. 执行器技术执行器是采煤机智能调高控制系统的“手脚”。
随着电机和液压技术的进步,执行器逐渐向高效、低能耗的方向发展。
例如,采用永磁直流电机的执行器具有较高的效率和较长的寿命。
四、实践应用采煤机智能调高控制在实践中有着广泛的应用。
通过实时感知采煤机的位置、速度、负载等信息,控制系统可以自动调整采煤机的切割高度,以保证煤炭的开采效率和安全。
此外,智能调高控制还可以实现远程监控和故障诊断,进一步提高采煤机的可靠性和维护效率。
五、未来展望随着技术的不断进步,采煤机智能调高控制技术将进一步向高效、智能、环保的方向发展。
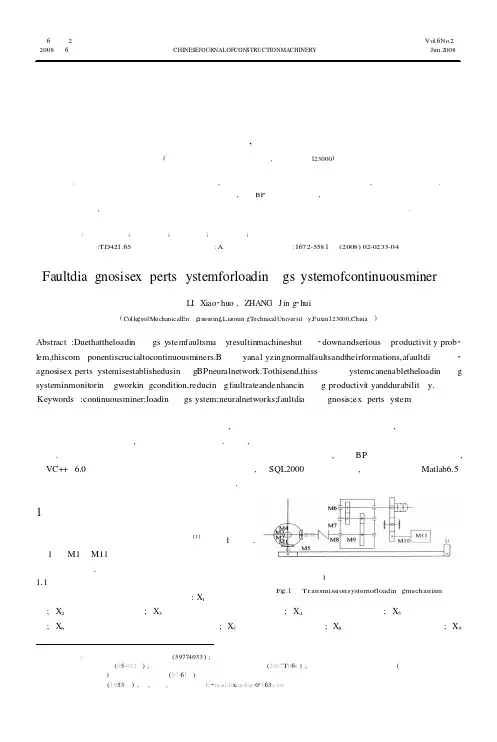
基金项目:国家自然科学基金资助项目(59774033);国家安全生产监督管理局、国家煤矿安全监察局安全生产科技发展指导性计划资助项目(5);辽宁省教育厅创新团队计划资助项目(T 6);大型工矿装备实验研究中心(辽宁省高校重点实验室)开放基金资助项目(6)作者简介李晓豁(53),男,教授,博士生导师2x @63连续采煤机装载系统故障诊断的专家系统李晓豁,张景晖(辽宁工程技术大学机械工程学院,辽宁阜新 123000)摘要:装载系统是连续采煤机重要的组成部分,如果发生故障将导致连续采煤机停止工作,严重影响其生产率.通过对连续采煤机装载系统常见故障及其原因分析,采用BP 神经网络方法,建立了连续采煤机装载系统故障诊断专家系统,利用该系统可确定连续采煤机装载系统的运行状态、降低故障率、提高生产率和使用寿命.关键词:连续采煤机;装载系统;神经网络;故障诊断;专家系统中图分类号:TD421.65 文献标识码:A 文章编号:1672-5581(2008)02-0233-04Faultdia gnosisex perts ystemforloadings ystemofcontinuousminer LI Xiao 2huo ,ZHANG J in g 2hui (Col le geofMechanicalEn gi neering,Liaonin gTechnical Universit y,Fuxin123000,China)Abstract :Duethattheloadin gs ystemfaultsma yresultinmachineshut 2downandserious productivit y prob 2lem,thiscom ponentiscrucialtocontinuousminers.B yanal yzingnormalfaultsandtheirformations,afaultdi 2agnosisex perts ystemisestablishedusin gBPneuralnetwork.Tothisend,thiss ystemcanenabletheloading systeminmonitorin gworkin gcondition,reducin gfaultrateandenhancin g productivit yanddurabilit y.Keywords :continuousminer;loadin gs ystem;neuralnetworks;faultdia gnosis;ex perts ystem 装载系统作为连续采煤机的重要组成部分,承担着连续采煤机装载机构传动的任务,若发生故障将造成连续采煤机停止工作,严重影响机器生产率.因此,对于连续采煤机装载系统的故障诊断研究显得尤为重要.本文通过总结连续采煤机装载系统的常见故障和故障原因的分析,采用BP 神经网络理论和方法,以VC++ 6.0作为编程平台制作友好的人机交换界面,以SQL2000作为数据库,并在内部嵌入Matlab6.5来建立连续采煤机装载系统故障诊断的专家系统.图1 装载机构的传动系统Fi g.1 Tr ansmissionsystemofloadin gmechanism1 故障分析与检测方法连续采煤机的装载机构传动系统[1]如图1所示.图1中M1~M11是在连续采煤机装载系统关键部位安装的传感器.1.1 故障现象该系统的故障现象及其表示如下:X 1为星轮转速慢;X 2为星轮转动不均匀;X 3为星轮工作时噪音大、振动大;X 4为星轮工作时过热;X 5为星轮转动无力;X 6为星轮转动正常但是输送机转动不均;X 7为减速器转动不均匀;X 8为减速器有振动、有噪音;X 9第6卷第2期2008年6月中 国 工 程 机 械 学 报CHINESEJOURNALOFCONSTRUCTIONMACHINERY Vol.6No.2 Jun.20080-08220070807-1:19-.E mail:l i i aohuo 1.c om为减速器过热;X 10为电动机有振动、有噪音;X 11电动机转动不均匀;X 12电动机过热.1.2 故障原因通过分析,确定各种故障原因及其表示如下:Y 1为电压高或低于电动机的额定电压;Y 2为定子绕组内部线圈短路;Y 3为离合器打滑;Y 4为连接星轮的轴有变形;Y 5为连接星轮锥齿轮磨损;Y 6为连接星轮的轴承损坏;Y 7为星轮的轴承缺少润滑油;Y 8为连接传动轴的锥齿轮有磨损;Y 9,Y 10,Y 11分别为1,2,3轴减速器的齿轮损坏(①齿轮发生点蚀,②齿廓有变形或齿根有裂纹,③齿轮发生断齿现象);Y 12,Y 13,Y 14分别为1,2,3轴减速器轴承损坏(①由于点蚀轴承中滚子在滚道中有不规则运动,②产生裂纹或压痕,③表面脱落或胶合);Y 15为减速器缺少润滑油;Y 16为固定减速器螺丝松脱;Y 17为固定电机螺丝松脱;Y 18为电机润滑油不足;Y 19为电机负载超过额定值;Y 20为电机轴承损坏(①由于点蚀轴承中滚子在滚道中有不规则运动,②产生裂纹或压痕,③表面脱落或胶合).1.3 检测方法采用传感器拾取连续采煤机装载机构传动系统关键点的信号,共有11个测试点,先对这些传感器的模拟电信号输出进行预后处理,再连接在单片机上的AD 转换器采集数据并且把采集的模拟信号转为数字信号,通过串口把数据传到专家系统中,再由专家系统对连续采煤机的装载机构传动系统的工作状态和损坏程度进行分析.分别在联接星轮的轴承、传动轴轴承座、电机轴承座和在减速器的3根传动轴的轴承座上安装压电加速度传感器.M2测X 2,X 3;M5测X 6,X 3;M10测X 10,X 11;M6,M7,M 8测X 7,X 8.分别在星轮联接星轮的轴承、减速器外壳和电机轴承座上安装温度传感器.M3测X 4;M9测X 9和M11测X 12.在联接星轮的轴上安装霍尔传感器M1测X 1和X 2.在联接星轮的轴上安装电阻应变片传感器M4测X 5.2 故障诊断的数学模型通过故障征兆的个数与故障的个数可形成由2个子神经网络构成的1个复杂神经网络.子神经网络1是由输入层6个神经元、隐藏层10个神经元和输出层8个神经元的3层BP 神经网络即n =6,j =1,2,…,10,m =10,k =1,2,…,8,负责星轮部分的故障.子神经网络2是由输入层6个神经元、隐藏层10个神经元和输出层12个神经元的3层BP 神经网络,即n =6,j =1,2,…,10,m =10,k =1,2,…,12,负责电动机和减速器的故障.首先得到神经网络的输入层到隐藏层的净输入值n 1j [2,3]为n 1j =∑ni =1ωij X i -θ1j (1)式中:ωij 为输入层到输出层权值;X i 为输入故障值;θ1j 为输入层到输出层阀值.将净输入值n 1j 代入到sigmoid 函数中,得到隐藏层值y j =11+e -λn 1j (2)式中:λ为sigmoid 函数的速度系数,在实际的神经网络中常取1.则隐藏层到输出层净值为n 2k =∑mi =1v ik y i -θ2k (3)式中:v ik 为隐藏层到输出层权值;θ2k 为隐藏层到输出层阀值.最后得到输出值Y k =1+λ(4)其中隐藏层到输出层权值和输入层到输出层权值由B 神经网络自我学习循环训练,形成连续采煤机故障诊断专家系统的知识库432 中 国 工 程 机 械 学 报第6卷 1e -n 2k v w P .3 故障诊断专家系统的VC 实现3.1 专家系统的特点该故障诊断专家系统是1个含有2个子网络的复杂神经网络故障诊断专家系统.包括BP 神经网络1(星轮部分的故障)和BP 神经网络2(电动机和减速器的故障).采用神经网络方法具有自适应学习性、联想性和记忆推理性,可以克服传统故障诊断专家系统的知识获取困难问题和组合爆炸问题.如果只建立1个网络不能很好地反映出诊断对象的知识结构将会导致连接值和连接阀值权数目增加,学习样本的组合也将很巨大.增大诊断的难度并且降低诊断的精度并为以后解释程序的设计带来很大的困难[4].以VC++6.0作为编程平台,制作友好的可视化人机交互式界面.利用SQL2000作为数据库来保存样本学习表、知识库表和故障历史表.内部嵌入Matlab6.5,利用其强大的图像功能与VC++6.0混合编程来分别对2个子神经网络进行仿真.3.2 专家系统的运行举例运行故障诊断专家系统后,首先进入到专家系统主界面,如图2所示.图2 专家系统主界面F i g.2 I nter faceofex per ts ystems 在专家系统主界面点击神经网络学习按扭,可以进入到神经网络学习界面,见图3所示,其功能为形图3 神经网络学习界面F 3 I f f 532 第2期李晓豁,等:连续采煤机装载系统故障诊断的专家系统 ig.n ter aceo n eu ra ln etwor k lear n in g成专家系统的知识库.首先点击连接样本表按钮,使专家系统读取神经网络样本学习表里的训练数据.再按网络仿真按钮,利用BP 算法训练神经网络的样本数据,形成知识库,即输入层到隐藏层的权值和隐藏层到输出层的权值.分别写入输入层到隐藏层权值故障表和隐藏层到输出层权值故障表,并且在误差学习图像中显示迭代次数与学习误差的关系.点击显示知识库按钮,分别显示输入层到隐藏层的权值和隐藏层到输出层的权值.图4 故障诊断界面F i g.4 Inter faceoffailur edia gnosis在专家系统主界面点击神经网络诊断按钮,可以进入故障诊断界面,见图4所示,其功能为诊断连续采煤机的故障,并且加以分析.点击读取检测数据按钮,通过串口获得传感器检测上来的故障信号,并且把故障信号翻译成故障征兆.在点击连接知识库按钮,使专家系统读取知识库的内容,点击开始诊断按钮,专家系统利用知识库的数据来分析传入故障信号并且计算出结果.将计算出来的数据用故障数据图像的方式表现出来.并且把数据结果翻译为汉字说明即故障原因,便于使用者操作.点击保存数据按钮,可以使诊断的结果保存在故障历史表中.点击打开历史表,查看故障的历史记录.在专家系统主界面点击数据库管理按钮,进入数据库管理界面可以管理专家系统的数据库即样本学习表、知识库表和故障历史表.4 结论本文通过BP 神经网络的算法,以VC++6.0作为编程平台,利用SQL2000作为数据库并在内部嵌入Matlab6.5来制作出连续采煤机装载系统的故障诊断专家系统,能对连续采煤机装载系统的故障做出准确的分析和判断,加以排除和修理,能大大节省维修时间,提高连续采煤机的工作可靠性和生产率.参考文献:[1] 谢锡纯,李晓豁.矿山机械与设备[M].徐州:中国矿业大学出版社,2000. XIEXichun,LIXiaohuo.Minin gmachiner yande qui pment[M].Xuzhou:ChinaUniversi t yofMinin gPress,2000.[2] 吴今培,肖艰华.智能故障诊断与专家系统[M].北京:科学出版社,1997. WUJin pei,XIAOJianhua.Intelli gentFDandES[M].Bei jing:SciencePress,1997.[3] 虞和济.基于神经网络的智能诊断[M].北京:冶金工业出版社,2000. YUHe ji.Intelli gentdia gnosismethodsbasedonneural m etwork[M].Beijing:Metallur gicalIndustr yPress,2000.[4] 朱福民,张巍,李自光.水泥混凝土模式摊铺机在实际施工中的常见问题及故障检测方法[J].中国工程机械学报,2004,2(1):96-100. ZHUFumin,ZHANGWei,LIZi guang.Problemsdurin gtheo perationofconcretesli pform paverandsolutionstothem[J].ChineseJournalofConstructionMachiner y,2004,2(1):96-100.632 中 国 工 程 机 械 学 报第6卷 。
基于CAN总线的采煤机远程控制及故障诊断装置
刘俊锋;刘庚;黄林
【期刊名称】《黑龙江科技信息》
【年(卷),期】2018(000)033
【摘要】本文旨在设计一款基于CAN总线控制网络的智能、网络、绿色化采煤机远程控制及故障诊断装置;该套系统将在具备常规采煤机远程监控箱控制功能外,在智能化方面具有先进的配置,具有趋势曲线分析,历史报表查询,故障自诊断系统,远程维护采煤机等功能,完全满足智能化、自动化工作面配套要求.
【总页数】2页(P177-178)
【作者】刘俊锋;刘庚;黄林
【作者单位】西安煤矿机械有限公司,陕西西安 710032;西安煤矿机械有限公司,陕西西安 710032;西安煤矿机械有限公司,陕西西安 710032
【正文语种】中文
【中图分类】TP276;TD421
【相关文献】
1.基于DSP和CAN总线的采煤机分布式控制装置 [J], 邱锦波;刘振坚
2.基于CAN总线技术的PSM电源远程控制通信系统 [J], 张猛;姚列英;王英翘
3.基于CAN总线远程控制数控机床的通信节点硬件设计 [J], 亓学芸
4.基于3G网络和CAN总线的汽车远程控制系统设计 [J], 穆胜亮;秦贵和
5.基于CAN总线的采煤机远程控制及故障诊断装置 [J], 刘俊锋;刘庚;黄林;
因版权原因,仅展示原文概要,查看原文内容请购买。
智能化采煤工作面介绍智能化采煤工作面是指利用现代先进的技术手段实现矿井采煤工作的自动化、智能化和信息化的一种工作模式。
它通过在采煤工作面上应用现代化的采煤设备、自动控制技术和信息化系统,能够实现采煤工作面的智能化操作和管理。
下面将详细介绍智能化采煤工作面的概念、特点和应用。
一、概念智能化采煤工作面是指采用先进的自动控制技术和信息化系统,使采煤工作面能够实现智能化的操作和管理。
它通过自动化设备和系统的协作,可以实现采煤工作面的自动控制、数据采集、动态监测和故障诊断等功能。
它使得采煤工作面的工作更加智能化、高效化和安全化。
二、特点1.自动化操作:智能化采煤工作面能够实现全自动采煤和自动化运输,只需少数人员进行监控和管理。
它能够减少人工操作的风险和劳动强度,提高工作效率。
2.数据采集和动态监测:智能化采煤工作面能够实时采集和监测采煤工作面的各种数据,包括煤层厚度、瓦斯浓度、岩层位移等。
它能够提供及时准确的数据支持,为矿井管理和决策提供科学依据。
3.故障诊断和智能维修:智能化采煤工作面能够自动识别和诊断设备故障,并通过数据分析和智能算法进行修复和调整。
它能够减少故障停机时间和维修成本,提高设备的可靠性和使用寿命。
4.信息化管理:智能化采煤工作面能够通过信息化系统实现对采煤工作面的全面管理。
它能够对煤矿生产过程进行全方位的监控和管理,包括生产计划、煤炭质量、能源消耗等。
它能够提供数据支持,为矿井管理者提供决策依据。
三、应用智能化采煤工作面已经在国内外一些大型煤矿中得到广泛应用。
它能够提高采煤的效率和安全性,减少人工操作的风险和劳动强度。
目前,国内一些大型煤矿已经实现采煤工作面的全自动化,实现了矿井采煤工作的智能化管理。
智能化采煤工作面的应用主要包括以下几个方面:1.采煤设备自动控制:采煤机、运输设备等采煤设备的自动控制,可以实现采煤的自动化操作和高效率。
2.数据采集和监测:通过传感器和数据采集系统,实时采集和监测采煤工作面的各种数据,为矿井管理和生产决策提供数据支持。
综采工作面系统自动化要求引言概述:随着科技的不断进步,综采工作面系统自动化已成为现代矿山开采的重要发展方向。
自动化技术的应用将提高矿山生产效率、降低生产成本,同时减少工人的劳动强度和提高工作安全性。
本文将详细阐述综采工作面系统自动化的要求,包括设备自动化、数据采集与处理、智能化控制、远程监控与管理四个方面。
一、设备自动化1.1 自动化采煤机:自动化采煤机是综采工作面系统中最重要的设备之一。
其自动化要求包括自动化控制系统、自动化调整和自动化维护等方面。
自动化控制系统应具备实时监测和控制采煤机的功能,能够实现自动切割、自动推进和自动卸载等操作。
自动化调整要求采煤机能够根据工作面的煤质和地质条件进行自动调整,以提高采煤效率和质量。
自动化维护则要求采煤机能够自动检测和诊断设备故障,并进行自动维护和保养。
1.2 自动化输送系统:自动化输送系统是将采煤机采出的煤炭从工作面输送到地面的关键设备。
其自动化要求包括输送带的自动控制、输送速度的自动调节和故障自动检测等方面。
自动控制要求输送带能够根据采煤机的工作状态和煤炭产量进行自动控制,保证煤炭的连续输送。
自动调节要求输送速度能够根据煤炭产量的变化进行自动调节,以避免堵塞和煤炭浪费。
故障自动检测要求输送系统能够自动检测和诊断故障,并进行自动报警和维修。
1.3 自动化通风系统:自动化通风系统是综采工作面系统中的关键设备,其自动化要求包括通风风量的自动调节、通风风速的自动控制和通风系统的自动监测等方面。
自动调节要求通风系统能够根据工作面的煤质和地质条件进行自动调节,以保证工作面的安全通风。
自动控制要求通风风速能够根据工作面的需求进行自动控制,以保证工作面的正常运行。
自动监测要求通风系统能够实时监测和报警通风系统的运行状态,以及检测和诊断通风系统的故障。
二、数据采集与处理2.1 传感器技术:传感器技术是综采工作面系统数据采集的基础。
其要求包括传感器的准确度、稳定性和可靠性等方面。
远程采煤可视化监管系统研究摘要:系统实现了通过图像实时摄取和显示,将综采现场的实际情况运用可视化技术手段,通过视频画面真实的反映出来,从而有效解决地面调度与井下生产场景之间的视频通信问题,为矿井安全生产调度提供了新的辅助手段,提高了调度中心对采煤机工作环境的监视能力。
关键词:远程;可视化;监管系统;研究中图分类号:tn914文献标识码:a1概述系统图像信息采集由采煤机上摄像无线发射机(f)、运载机头基站(s1)、移动泵站尾端顺槽基站(s2)等三部分电路组成。
采煤机图像传输采用微波通信和波分技术进入矿信息化网。
具体为:信息经采煤机无线发射图像信息、运载机头机站转发信息、泵站顺槽基站进入矿信息化网、接入调度中心大屏,显示采煤机作业的实时视频画面。
由此,在工作面的采煤机滚筒割煤作业、煤壁落煤量、运载机刮板、支架顶板等实时运行情况均反馈到调度中心大屏。
调度人员可真实的、准确无误的指挥井下生产。
图1中系统组成图。
图1系统结构图2无线通信链路采煤工作面是一个各种灾害容易聚集的地方,近年来国内对矿井采煤工作面自动化的要求越来越高,实现无人的自动化和智能化采矿是地下开采的最终目标。
采煤机是综采工作面落煤和装煤的机械,它的运转正常与否决定综采工作面的工作效率,对采煤机的运行状态进行监视,是提高电牵引采煤机可靠性与安全性的重要手段,由于采煤机特殊的工作环境,一方面,井下现场繁冗的布线以及线路的维护问题,不但增加了生产成本,也是生产效率降低;另一方面,实时大量图像信息的实时快速处理,需要信号传输线路高宽带及高性能的信号处理器。
综合考虑上述采煤工作面的特殊工作环境,选择通过无线通信方式实现整套监管系统。
合理的通信信道模型是构建系统的基础。
目前井下无线通信主要表现为短距离无线通信方式,特别是在井下巷道中对于无线短距离通信应用已经初形规模。
对于无线通信而言,井下巷道是一个较为自由的空间,是一种非理想的波导,这样,电磁波在巷道中的传播呈现波导特性,相对于自由空间的损耗而言,无线电磁波在巷道中的损耗较大;进而,采煤工作面相对于巷道而言,采煤工作面的特殊构造决定无线电磁波在其中的损耗更大;采煤空间是时变的,因此会对无线通信带来周期或者非周期的变化:其空间充斥着采煤设备,一是对电磁波传播途径造成阻挡,其不规则使得出现非相关干涉,电磁波传播损耗较大;二是由于采煤设备的运行,产生较大的机械噪声,从而对无线通信造成干扰。
深圳市科技有限公司基于4G、Internet等通讯原理开发的采煤机远程监控与故障诊断系统。
该系统可对采煤机电机电流、扭矩、牵引速度、牵引方向和故障等内部参数以及采机位置和摇臂倾角等外部参数进行监测和传输,并可实现在紧急情况下远程紧急停车。
阐述了采煤机在线远程监控与故障诊断系统的原理与实现方法。
该系统在实际应用中取得了良好的效果。
采煤机是综采工作面落煤和装煤的主要设备,它的正常运转决定着综采工作面的生产效率。
虽然采煤机控制系统具有监测和故障诊断功能,但由于工作环境恶劣,采煤机零部件多,结构复杂,致使操作司机不能及时掌控采煤机的各项运行参数,可能使采煤机带病工作,甚至出现故障。
另外,采煤机的工作参数如采高和采机位置等信息是建立自动化综采工作面的基本依据。
建立采煤机运行状态的实时远程监测,有助于保障采煤机的安全运行以及综合调度工作面生产,提高煤矿生产的自动化、信息化管理水平,并将为实现自动化无
人工作面奠定基础。
电牵引采煤机的监测参数分为内部参数和外部参数。
内部参数指采煤机运行的内部系统参数;外部参数指需要加装相应的外部传感器而获得的采机运行宏观参数。
内部参数
采煤机内部参数由采煤机的PLC 控制器和牵引变频器采集。
PLC 完成截割、滚筒升降、系统故障诊断等的操作与控制。
牵引变频器在PLC 控制下,负责采煤机牵引操作,二者通过RS485 通讯端口实现主控通讯。
牵引变频器完成牵引参数的采集并上传PLC ,PLC 完成其他内部参数的采集。
全部内部参数数据由PLC 通过RS485/RS232 接口传输给通讯工控机。
外部参数
外部参数包括瓦斯含量、采高卧底量、采机位置等参数。
(1) 瓦斯含量:外接瓦斯传感器直接接入PLC控制器。
(2) 采高、卧底量:在左右摇臂上分别安装气体摆式倾角传感器,摇臂的升降状态转换成传感器的倾角变化,经APD 转换后由PLC 采集。
PLC远程网关控制系统架构:
不管是内部参数还是外部参数,这些参数的最终汇合点都是PLC,因此PLC 成为了电牵引采煤机的各种参数中转中心。
而深圳市科技有限公司的远程设备监控及故障诊断系统就是利用采煤机的这一特点,通过对采煤机的PLC进行实时监控来实现对整个采煤机的运行状态及各种参数的监控及设备的故障诊断。