第11章LSDYNA自适应网格划分资料
- 格式:ppt
- 大小:2.79 MB
- 文档页数:28
LS-DYNA 理论及功能LS-DYNA 的理论及功能LS-DYNA 发展概况 (LS-DYNA Introduction)LS-DYNA是以显式为主、隐式为辅的通用非线性动力分析有限元程序,特别适合求解 各种二维、三维非线性结构的高速碰撞、爆炸和金属成形等非线性动力冲击问题,同时可以 求解传热、流体及流固耦合问题。
DYNA 程序系列最初是 1976 年在美国 Lawrence Livermore National Lab. 由 J.O.Hallquist 博士主持开发完成的,主要目的是为武器设计提供分析工具,后经 1979、1981、1982、1986、 1987、1988 年版的功能扩充和改进,成为国际著名的非线性动力分析软件,在武器结构设 计、内弹道和终点弹道、军用材料研制等方面得到了广泛的应用。
1988 年 J.O.Hallquist 创建 LSTC 公司,推出 LS-DYNA 程序系列,主要包括显式 LS-DYNA2D、LS-DYNA3D、隐式 LS-NIKE2D、LS-NIKE3D、热分析 LS-TOPAZ2D、 LS-TOPAZ3D、前后处理 LS-MAZE、LS-ORION、LS-INGRID、LS-TAURUS 等商用程序, 进一步规范和完善 DYNA 的研究成果,陆续推出 930 版(1993 年)、936 版(1994 年)、940 版(1997 年),950 版(1998 年)增加了汽车安全性分析(汽车碰撞、气囊、安全带、假人)、 薄板冲压成形过程模拟以及流体与固体耦合(ALE 和 Euler 算法)等新功能,使得 LS-DYNA 程序系统在国防和民用领域的应用范围进一步扩大,并建立了完备的质量保证体系。
1997 年LSTC公司将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序 合成一个软件包,称为LS-DYNA,PC版的前后处理采用ETA公司的FEMB,新开发的后处 理器为LS-POST。
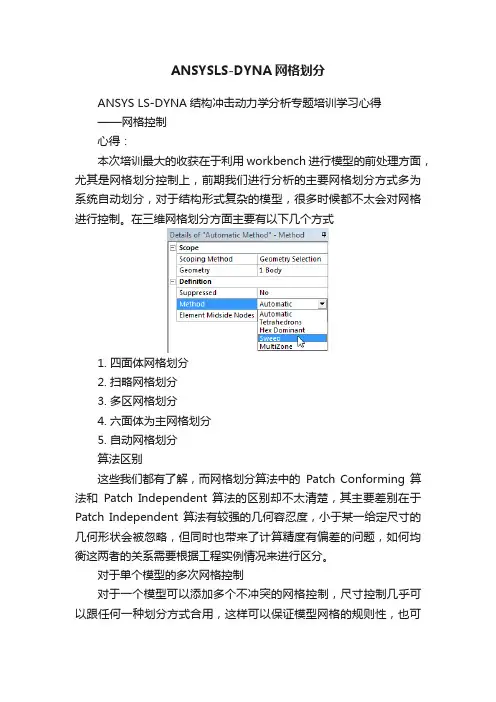
ANSYSLS-DYNA网格划分ANSYS LS-DYNA结构冲击动力学分析专题培训学习心得——网格控制心得:本次培训最大的收获在于利用workbench进行模型的前处理方面,尤其是网格划分控制上,前期我们进行分析的主要网格划分方式多为系统自动划分,对于结构形式复杂的模型,很多时候都不太会对网格进行控制。
在三维网格划分方面主要有以下几个方式1. 四面体网格划分2. 扫略网格划分3. 多区网格划分4. 六面体为主网格划分5. 自动网格划分算法区别这些我们都有了解,而网格划分算法中的Patch Conforming 算法和Patch Independent 算法的区别却不太清楚,其主要差别在于Patch Independent 算法有较强的几何容忍度,小于某一给定尺寸的几何形状会被忽略,但同时也带来了计算精度有偏差的问题,如何均衡这两者的关系需要根据工程实例情况来进行区分。
对于单个模型的多次网格控制对于一个模型可以添加多个不冲突的网格控制,尺寸控制几乎可以跟任何一种划分方式合用,这样可以保证模型网格的规则性,也可以控制单元数量(因为在DYNA中,单元数量及最小单元尺寸与计算效率及计算精度关系非常密切)。
局部网格控制局部网格控制同样也是以尺寸控制为基础,用单元尺寸、线份数、影响球等手段来实现所关注的局部网格质量。
这个控制的合理应用可以提高计算的效率和精度。
在高级尺寸共功能上,打开调整曲率功能可以调整曲率法向角,细化转角处网格,还可以通过控制狭缝间的网格层数来对细微部分进行细化处理。
单元数量控制DANY的分析对单元数量很敏感,普通的双核CPU的计算机,计算400万单元的模型已经是极限,大型计算机的并行计算也需要进行合理的网格数量及尺寸的控制,另外不同的分析类型对网格质量的要求也不同。
运用DYNA进行碰撞模拟时多采用的是显示动力学分析的模式,这是因为一方面,计算收敛程度高,另一方面,计算结果更为精确,只是由于显式分析计算量大,对网格的质量要求就很高。
第七章材料模型ANSYS/LS-DYNA包括40多种材料模型,它们可以表示广泛的材料特性,可用材料如下所示。
本章后面将详细叙述材料模型和使用步骤。
对于每种材料模型的详细信息,请参看Appendix B,Material Model Examples或《LS/DYNA Theoretical Manual》的第十六章(括号内将列出与每种模型相对应的LS-DYNA材料号)。
线弹性模型·各向同性(#1)·正交各向异性(#2)·各向异性(#2)·弹性流体(#1)非线弹性模型·Blatz-ko Rubber(#7)·Mooney-Rivlin Rubber(#27)·粘弹性(#6)非线性无弹性模型·双线性各向同性(#3)·与温度有关的双线性各向同性(#4)·横向各向异性弹塑性(#37)·横向各向异性FLD(#39)·随动双线性(#3)·随动塑性(#3)·3参数Barlat(#36)·Barlat各向异性塑性(#33)·与应变率相关的幂函数塑性(#64)·应变率相关塑性(#19)·复合材料破坏(#22)·混凝土破坏(#72)·分段线性塑性(#24)·幂函数塑性(#18)压力相关塑性模型·弹-塑性流体动力学(#10)·地质帽盖材料模型(#25)泡沫模型·闭合多孔泡沫(#53)·粘性泡沫(#62)·低密度泡沫(#57)·可压缩泡沫(#63)·Honeycomb(#26)需要状态方程的模型·Bamman塑性(#51)·Johnson-Cook塑性(#15)·空材料(#9)·Zerilli-Armstrong(#65)·Steinberg(#11)离散单元模型·线弹性弹簧·普通非线性弹簧·非线性弹性弹簧·弹塑性弹簧·非弹性拉伸或仅压缩弹簧·麦克斯韦粘性弹簧·线粘性阻尼器·非线粘性阻尼器·索(缆)(#71)刚性体模型·刚体(#20)7.1定义显示动态材料模型用户可以采用ANSYS命令 MP, MPTEMP, MPDATA, TB, TBTEMP和 TBDATA以及ANSYS/LS-DYNA命令 EDMP来定义材料模型。
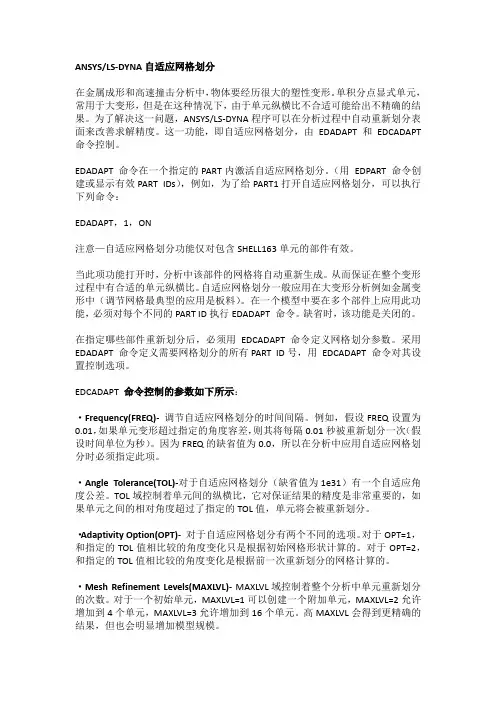
ANSYS/LS-DYNA自适应网格划分在金属成形和高速撞击分析中,物体要经历很大的塑性变形。
单积分点显式单元,常用于大变形,但是在这种情况下,由于单元纵横比不合适可能给出不精确的结果。
为了解决这一问题,ANSYS/LS-DYNA程序可以在分析过程中自动重新划分表面来改善求解精度。
这一功能,即自适应网格划分,由EDADAPT 和EDCADAPT 命令控制。
EDADAPT 命令在一个指定的PART内激活自适应网格划分。
(用EDPART 命令创建或显示有效PART IDs),例如,为了给PART1打开自适应网格划分,可以执行下列命令:EDADAPT,1,ON注意—自适应网格划分功能仅对包含SHELL163单元的部件有效。
当此项功能打开时,分析中该部件的网格将自动重新生成。
从而保证在整个变形过程中有合适的单元纵横比。
自适应网格划分一般应用在大变形分析例如金属变形中(调节网格最典型的应用是板料)。
在一个模型中要在多个部件上应用此功能,必须对每个不同的PART ID执行EDADAPT 命令。
缺省时,该功能是关闭的。
在指定哪些部件重新划分后,必须用EDCADAPT 命令定义网格划分参数。
采用EDADAPT 命令定义需要网格划分的所有PART ID号,用EDCADAPT 命令对其设置控制选项。
EDCADAPT 命令控制的参数如下所示:·Frequency(FREQ)-调节自适应网格划分的时间间隔。
例如,假设FREQ设置为0.01,如果单元变形超过指定的角度容差,则其将每隔0.01秒被重新划分一次(假设时间单位为秒)。
因为FREQ的缺省值为0.0,所以在分析中应用自适应网格划分时必须指定此项。
·Angle Tolerance(TOL)-对于自适应网格划分(缺省值为1e31)有一个自适应角度公差。
TOL域控制着单元间的纵横比,它对保证结果的精度是非常重要的,如果单元之间的相对角度超过了指定的TOL值,单元将会被重新划分。

LS-DYNA使用指南中文版本第一章引言ANSYS/LS-DYNA将显式有限元程序LS-DYNA和ANSYS程序强大的前后处理结合起来。
用LS-DYNA的显式算法能快速求解瞬时大变形动力学、大变形和多重非线性准静态问题以及复杂的接触碰撞问题。
使用本程序,可以用ANSYS建立模型,用LS-DYNA做显式求解,然后用标准的ANSYS后处理来观看结果。
也可以在ANSYS和ANSYS-LS-DYNA之间传递几何信息和结果信息以执行连续的隐式-显式/显式-隐式分析,如坠落实验、回弹、及其它需要此类分析的应用。
1.1显式动态分析求解步骤概述显式动态分析求解过程与ANSYS程序中其他分析过程类似,主要由三个步骤组成:1:建立模型(用PREP7前处理器)2:加载并求解(用SOLUTION处理器)3:查看结果(用POST1和POST26后处理器)本手册主要讲述了ANSYS/LS-DYNA显式动态分析过程的独特过程和概念。
没有详细论述上面的三个步骤。
如果熟悉ANSYS程序,已经知道怎样执行这些步骤,那么本手册将提供执行显式动态分析所需的其他信息。
如果从未用过ANSYS,就需通过以下两本手册了解基本的分析求解过程:·ANSYSBaicAnalyiGuide·ANSYSModelingandMehingGuide使用ANSYS/LS-DYNA时,我们建议用户使用程序提供的缺省设置。
多数情况下,这些设置适合于所要求解的问题。
1.2显式动态分析采用的命令在显式动态分析中,可以使用与其它ANSYS分析相同的命令来建立模型、执行求解。
同样,也可以采用ANSYS图形用户界面(GUI)中类似的选项来建模和求解。
然而,在显式动态分析中有一些独特的命令,如下:EDADAPT:激活自适应网格EDASMP:创建部件集合EDBOUND:定义一个滑移或循环对称界面EDBVIS:指定体积粘性系数EDB某:创建接触定义中使用的箱形体EDCADAPT:指定自适应网格控制EDCGEN:指定接触参数EDCLIST:列出接触实体定义EDCMORE:为给定的接触指定附加接触参数EDCNSTR:定义各种约束EDCONTACT:指定接触面控制EDCPU:指定CPU时间限制EDCRB:合并两个刚体EDCSC:定义是否使用子循环EDCTS:定义质量缩放因子EDCURVE:定义数据曲线EDDAMP:定义系统阻尼EDDC:删除或杀死/重激活接触实体定义EDDRELA某:进行有预载荷几何模型的初始化或显式分析的动力松弛EDDUMP:指定重启动文件的输出频率(d3dump)EDENERGY:定义能耗控制EDFPLOT:指定载荷标记绘图EDHGLS:定义沙漏系数EDHIST:定义时间历程输出EDHTIME:定义时间历程输出间隔EDINT:定义输出积分点的数目EDIS:定义完全重启动分析的应力初始化EDIPART:定义刚体惯性EDLCS:定义局部坐标系EDLOAD:定义载荷EDMP:定义材料特性EDNB:定义无反射边界EDNDTSD:清除噪声数据提供数据的图形化表示EDNROT:应用旋转坐标节点约束EDOPT:定义输出类型,ANSYS或LS-DYNAEDOUT:定义LS-DYNAASCII输出文件EDPART:创建,更新,列出部件EDPC:选择、显示接触实体EDPL:绘制时间载荷曲线EDPVEL:在部件或部件集合上施加初始速度EDRC:指定刚体/变形体转换开关控制EDRD:刚体和变形体之间的相互转换EDREAD:把LS-DYNA的ASCII输出文件读入到POST26的变量中EDRI:为变形体转换成刚体时产生的刚体定义惯性特性EDRST:定义输出RST文件的时间间隔EDSHELL:定义壳单元的计算控制EDSOLV:把“显式动态分析”作为下一个状态主题EDSP:定义接触实体的小穿透检查EDSTART:定义分析状态(新分析或是重启动分析)EDTERM:定义中断标准EDTP:按照时间步长大小绘制单元EDVEL:给节点或节点组元施加初始速度EDWELD:定义无质量焊点或一般焊点EDWRITE:将显式动态输入写成LS-DYNA输入文件PARTSEL:选择部件集合RIMPORT:把一个显式分析得到的初始应力输入到ANSYSRE某PORT:把一个隐式分析得到的位移输出到ANSYS/LS-DYNAUPGEOM:相加以前分析得到的位移,更新几何模型为变形构型1.3本手册使用指南本手册包含过程和参考信息,可从前到后选择性阅读。
自适应网格生成算法与应用自适应网格生成算法是一种重要的数值计算方法,广泛应用于科学计算、工程模拟和物理仿真等领域。
本文将详细介绍自适应网格生成算法的原理和应用,并探讨其在不同领域中的实际应用案例。
一、自适应网格生成算法的原理自适应网格生成算法是一种基于网格重构的数值计算方法。
其核心思想是根据问题的特性和求解需求,在计算过程中动态调整网格的大小和形状,以提高数值计算的效率和精度。
自适应网格生成算法通常包括以下几个步骤:1. 初始网格生成:根据问题的几何形状和边界条件,生成初始的网格。
2. 误差估计:通过计算网格单元内部的数值误差或局部残差,评估当前网格的精度。
3. 网格划分:根据误差估计结果,确定需要细分的网格单元,并对其进行细分操作。
4. 网格合并:根据误差估计结果,确定需要合并的网格单元,并对其进行合并操作。
5. 网格重构:根据细分和合并操作的结果,对整个网格进行重构,以适应新的问题求解需求。
6. 计算求解:在重构后的网格上进行数值计算,并更新问题的解。
7. 收敛判断:通过对比前后两次计算结果,判断数值计算是否收敛,若未收敛,则返回第二步。
二、自适应网格生成算法的应用自适应网格生成算法在科学计算、工程模拟和物理仿真等领域得到了广泛应用,能够提高计算效率和精度,降低计算成本。
下面将分别从这几个领域进行具体介绍。
1. 科学计算:自适应网格生成算法在科学计算中的应用非常广泛。
例如,对于流体力学中的空气动力学问题,通过自适应网格生成算法,可以在物体表面和流动区域自动调整网格的密度,以捕捉流动细节,提高计算精度和效率。
2. 工程模拟:工程模拟是一个复杂的过程,需要对多个物理场耦合求解。
自适应网格生成算法可以根据不同物理场的特性,分别调整网格在不同区域的分布和密度,以适应多个物理场的求解需求,从而提高工程模拟的准确性和可信度。
3. 物理仿真:自适应网格生成算法在物理仿真中也有重要应用。
例如,在计算结构强度和变形时,通过自适应网格生成算法,可以根据不同部位的应力和应变分布,自动调整网格的大小,以更好地捕捉局部细节,提高仿真结果的准确性。
ANSYS LS-DYNA结构冲击动力学分析专题培训学习心得——网格控制心得:本次培训最大的收获在于利用workbench进行模型的前处理方面,尤其是网格划分控制上,前期我们进行分析的主要网格划分方式多为系统自动划分,对于结构形式复杂的模型,很多时候都不太会对网格进行控制。
在三维网格划分方面主要有以下几个方式1. 四面体网格划分2. 扫略网格划分3. 多区网格划分4. 六面体为主网格划分5. 自动网格划分算法区别这些我们都有了解,而网格划分算法中的Patch Conforming 算法和Patch Independent 算法的区别却不太清楚,其主要差别在于Patch Independent 算法有较强的几何容忍度,小于某一给定尺寸的几何形状会被忽略,但同时也带来了计算精度有偏差的问题,如何均衡这两者的关系需要根据工程实例情况来进行区分。
对于单个模型的多次网格控制对于一个模型可以添加多个不冲突的网格控制,尺寸控制几乎可以跟任何一种划分方式合用,这样可以保证模型网格的规则性,也可以控制单元数量(因为在DYNA中,单元数量及最小单元尺寸与计算效率及计算精度关系非常密切)。
局部网格控制局部网格控制同样也是以尺寸控制为基础,用单元尺寸、线份数、影响球等手段来实现所关注的局部网格质量。
这个控制的合理应用可以提高计算的效率和精度。
在高级尺寸共功能上,打开调整曲率功能可以调整曲率法向角,细化转角处网格,还可以通过控制狭缝间的网格层数来对细微部分进行细化处理。
单元数量控制DANY的分析对单元数量很敏感,普通的双核CPU的计算机,计算400万单元的模型已经是极限,大型计算机的并行计算也需要进行合理的网格数量及尺寸的控制,另外不同的分析类型对网格质量的要求也不同。
运用DYNA进行碰撞模拟时多采用的是显示动力学分析的模式,这是因为一方面,计算收敛程度高,另一方面,计算结果更为精确,只是由于显式分析计算量大,对网格的质量要求就很高。
ANSYS自适应网格划分(1)何为网格自适应划分?ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。
(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。
)通过这种误差估计,程序可以确定网格是否足够细。
如果不够的话,程序将自动细化网格以减少误差。
这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。
自适应网格划分的先决条件ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。
用户的模型在使用这个宏之前必须满足一些特定的条件。
(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。
)这些要求包括:标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。
而且单元的能量误差是受材料弹性模量影响的。
因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。
在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。
模型必须使用支持误差计算的单元类型。
模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
自适应网格划分可用单元2-D Structural SolidsPLANE2 2-D 6-Node Triangular SolidPLANE25 Axisymmetric Harmonic SolidPLANE42 2-D 4-Node Isoparametric SolidPLANE82 2-D 8-Node SolidPLANE83 Axisymmetric Harmonic 8-Node Solid3-D Structural SolidsSOLID45 3-D 8-Node Isoparametric SolidSOLID64 3-D Anisotropic SolidSOLID73 3-D 8-Node Solid with Rotational DOFSOLID92 3-D 10-Node Tetrahedral SolidSOLID95 3-D 20-Node Isoparametric Solid3-D Structural ShellsSHELL43 Plastic quadrilateral ShellSHELL63 Elastic Quadrilateral ShellSHELL93 8-Node Isoparametric Shell2-D Thermal SolidsPLANE35 2-D 6-Node Triangular SolidPLANE75 Axisymmetric Harmonic SolidPLANE55 2-D 4-Node Isoparametric SolidPLANE77 2-D 8-Node SolidPLANE78 Axisymmetric Harmonic 8-Node Solid3-D Thermal SolidsSOLID70 3-D 8-Node Isoparametric SolidSOLID87 3-D 10-Node Tetrahedral SolidSOLID90 3-D 20-Node Isoparametric Solid3-D Thermal ShellsSHELL57 Plastic Quadrilateral ShellANSYS自适应网格划分(2)如何使用自适应网格划分:基本过程进行自适应网格划分的基本过程包括如下步骤:1. 象其他线性静力分析或稳态热分析一样,先进入前处理器(/PREP7或Main Menu>Preprocessor)。
GLSTAT(参见*database_glstat)文件中报告的总能量是下面几种能量的和内能internal energy动能kinetic energy接触(滑移)能contact (sliding) energy沙漏能hourglass energy系统阻尼能system damping energy刚性墙能量rigidwall energyGLSTAT中报告的弹簧阻尼能“Spring and damper energy”是离散单元(discrete elements)、安全带单元(seatbelt elements)内能及和铰链刚度相关的内能(*constrained_joint_stiffness…)的总和。
而内能“Internal Energy”包含弹簧阻尼能“Spring and damper energy”和所有其它单元的内能。
因此弹簧阻尼能“Spring and damper energy”是内能“Internal energy”的子集。
由SMP 5434a版输出到glstat文件中的铰链内能“joint internal energy”跟*constrained_joing_stiffness不相关。
它似乎与*constrained_joint_revolute(_spherical,etc)的罚值刚度相关。
这是SMP 5434a之前版本都存在的缺失的能量项,对MPP 5434a也一样。
这种现象在用拉格朗日乘子(Lagrange Multiplier)方程时不会出现。
与*constrained_joint_stiffness相关的能量出现在jntforc文件中,也包含在glstat文件中的弹簧和阻尼能和内能中。
回想弹簧阻尼能“spring and damper energy”,不管是从铰链刚度还是从离散单元而来,总是包含在内能里面。
在MATSUM文件中能量值是按一个part一个part输出的(参见*database_matsum)。
旗开得胜第三章自适应网格划分何为网格自适应划分?ANSYS程序提供了近似的技术自动估计特定分析类型中因为网格划分带来的误差。
(误差估计在ANSYS Basic Analysis Procedures Guide第五章中讨论。
)通过这种误差估计,程序可以确定网格是否足够细。
如果不够的话,程序将自动细化网格以减少误差。
这一自动估计网格划分误差并细化网格的过程就叫做自适应网格划分,然后通过一系列的求解过程使得误差低于用户指定的数值(或直到用户指定的最大求解次数)。
自适应网格划分的先决条件ANSYS软件中包含一个预先写好的宏,ADAPT.MAC,完成自适应网格划分的功能。
用户的模型在使用这个宏之前必须满足一些特定的条件。
(在一些情况下,不满足要求的模型也可以用修正的过程完成自适应网格划分,下面还要讨论。
)这些要求包括:标准的ADAPT过程只适用于单次求解的线性静力结构分析和线性稳态热分析。
模型最好应该使用一种材料类型,因为误差计算是根据平均结点应力进行的,在不同材料过渡位置往往不能进行计算。
而且单元的能量误差是受材料弹性模量影响的。
因此,在两个相邻单元应力连续的情况下,其能量误差也可能由于材料特性不同而不一样。
在模型中同样应该避免壳厚突变,这也可能造成在应力平均是发生问题。
模型必须使用支持误差计算的单元类型。
(见表3-1)模型必须是可以划分网格的:即模型中不能有引起网格划分出错的部分。
表3-1 自适应网格划分可用单元2-D Structural Solids1旗开得胜PLANE2 2-D 6-Node Triangular SolidPLANE25 Axisymmetric Harmonic SolidPLANE42 2-D 4-Node Isoparametric SolidPLANE82 2-D 8-Node SolidPLANE83 Axisymmetric Harmonic 8-Node Solid3-D Structural SolidsSOLID45 3-D 8-Node Isoparametric SolidSOLID64 3-D Anisotropic SolidSOLID73 3-D 8-Node Solid with Rotational DOFSOLID92 3-D 10-Node Tetrahedral SolidSOLID95 3-D 20-Node Isoparametric Solid3-D Structural ShellsSHELL43 Plastic quadrilateral ShellSHELL63 Elastic Quadrilateral ShellSHELL93 8-Node Isoparametric Shell2-D Thermal SolidsPLANE35 2-D 6-Node Triangular SolidPLANE75 Axisymmetric Harmonic SolidPLANE55 2-D 4-Node Isoparametric SolidPLANE77 2-D 8-Node SolidPLANE78 Axisymmetric Harmonic 8-Node Solid3-D Thermal SolidsSOLID70 3-D 8-Node Isoparametric SolidSOLID87 3-D 10-Node Tetrahedral SolidSOLID90 3-D 20-Node Isoparametric Solid23-D Thermal ShellsSHELL57 Plastic Quadrilateral Shell如何使用自适应网格划分:基本过程进行自适应网格划分的基本过程包括如下步骤:1.象其他线性静力分析或稳态热分析一样,先进入前处理器(/PREP7或Main Menu>Preprocessor)。
LS-DYNA 简介ANSYS学习2009-02-17 20:03:54 阅读444 评论0 字号:大中小1.1 LS-DYNA 简介LS-DYNA 是世界上最著名的通用显式动力分析程序,能够模拟真实世界的各种复杂问题,特别适合求解各种二维、三维非线性结构的高速碰撞、爆炸和金属成型等非线性动力冲击问题,同时可以求解传热、流体及流固耦合问题。
在工程应用领域被广泛认可为最佳的分析软件包。
与实验的无数次对比证实了其计算的可靠性。
由J.O.Hallquist主持开发完成的DYNA程序系列被公认为是显式有限元程序的鼻祖和理论先导,是目前所有显式求解程序(包括显式板成型程序)的基础代码。
1988年J.O.Hallquist创建LSTC公司,推出LS-DYNA程序系列,并于1997年将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D 等程序合成一个软件包,称为LS-DYNA。
LS-DYNA的最新版本是2004年8月推出的970版。
ANSYS/LS-DYNA的前后处理器是ANSYS/PRE-POST,求解器LS-DYNA,是全世界范围内最知名的有限元显式求解程序。
LS-DYNA在1976年由美国劳伦斯·利沃莫尔国家实验室(Lawrence Livermore National Laboratory)J.O.Hallquist博士主持开发,时间积分采用中心差分格式,当时主要用于求解三维非弹性结构在高速碰撞、爆炸冲击下的大变形动力响应,是北约组织武器结构设计的分析工具。
LS-DYNA 的源程序曾在北约的局域网Pubic Domain公开发行,因此在广泛传播到世界各地的研究机构和大学。
从理论和算法而言,LS-DYNA是目前所有的显式求解程序的鼻祖和理论基础。
1988年,J.O.Hallquist创建利沃莫尔软件技术公司(Livermore Software Technology Corporation),LS-DYNA开始商业化进程,总体来看,到目前为止在单元技术、材料模式、接触算法以及多场耦合方面获得非常大的进步。
(完整word版)ls-dyna命令帮助手册(中文)Fini(退出四大模块,回到BEGIN层)/cle (清空内存,开始新的计算)1.定义参数、数组,并赋值.2./prep7(进入前处理)定义几何图形:关键点、线、面、体定义几个所关心的节点,以备后处理时调用节点号。
设材料线弹性、非线性特性设置单元类型及相应KEYOPT设置实常数设置网格划分,划分网格根据需要耦合某些节点自由度定义单元表3./solu加边界条件设置求解选项定义载荷步求解载荷步4./post1(通用后处理)5./post26 (时间历程后处理)6.PLOTCONTROL菜单命令7.参数化设计语言8.理论手册Fini(退出四大模块,回到BEGIN层)/cle (清空内存,开始新的计算)1 定义参数、数组,并赋值.u dim, par, type, imax, jmax, kmax, var1, vae2, var3 定义数组par: 数组名type:array 数组,如同fortran,下标最小号为1,可以多达三维(缺省)char 字符串组(每个元素最多8个字符)tableimax,jmax, kmax 各维的最大下标号var1,var2,var3 各维变量名,缺省为row,column,plane(当type 为table时) 2 /prep7(进入前处理)2.1 定义几何图形:关键点、线、面、体u csys,kcnkcn , 0 迪卡尔坐标系1 柱坐标2 球4 工作平面5 柱坐标系(以Y轴为轴心)n 已定义的局部坐标系u numstr, label, value设置以下项目编号的开始nodeelemkplineareavolu注意:vclear, aclear, lclear, kclear 将自动设置节点、单元开始号为最高号,这时如需要自定义起始号,重发numstru K, npt, x,y,z, 定义关键点Npt:关键点号,如果赋0,则分配给最小号u Kgen,itime,Np1,Np2,Ninc,Dx,Dy,Dz,kinc,noelem,imoveItime:拷贝份数Np1,Np2,Ninc:所选关键点Dx,Dy,Dz:偏移坐标Kinc:每份之间节点号增量noelem: “0” 如果附有节点及单元,则一起拷贝。
LS-DYNA 理论及功能LS-DYNA 的理论及功能LS-DYNA 发展概况 (LS-DYNA Introduction)LS-DYNA是以显式为主、隐式为辅的通用非线性动力分析有限元程序,特别适合求解 各种二维、三维非线性结构的高速碰撞、爆炸和金属成形等非线性动力冲击问题,同时可以 求解传热、流体及流固耦合问题。
DYNA 程序系列最初是 1976 年在美国 Lawrence Livermore National Lab. 由 J.O.Hallquist 博士主持开发完成的, 主要目的是为武器设计提供分析工具, 后经 1979、 1981、 1982、 1986、 1987、1988 年版的功能扩充和改进,成为国际著名的非线性动力分析软件,在武器结构设 计、内弹道和终点弹道、军用材料研制等方面得到了广泛的应用。
1988 年 J.O.Hallquist 创建 LSTC 公司,推出 LS-DYNA 程序系列,主要包括显式 LS-DYNA2D、LS-DYNA3D、隐式 LS-NIKE2D、LS-NIKE3D、热分析 LS-TOPAZ2D、 LS-TOPAZ3D、前后处理 LS-MAZE、LS-ORION、LS-INGRID、LS-TAURUS 等商用程序, 进一步规范和完善 DYNA 的研究成果,陆续推出 930 版(1993 年) 、936 版(1994 年) 、940 版(1997 年) ,950 版(1998 年)增加了汽车安全性分析(汽车碰撞、气囊、安全带、假人) 、 薄板冲压成形过程模拟以及流体与固体耦合 (ALE 和 Euler 算法) 等新功能, 使得 LS-DYNA 程序系统在国防和民用领域的应用范围进一步扩大,并建立了完备的质量保证体系。
1997 年LSTC公司将LS-DYNA2D、LS-DYNA3D、LS-TOPAZ2D、LS-TOPAZ3D等程序 合成一个软件包,称为LS-DYNA,PC版的前后处理采用ETA公司的FEMB,新开发的后处 理器为LS-POST。