基于ARM的汽车电子控制系统单元设计.
- 格式:doc
- 大小:28.50 KB
- 文档页数:3

ARM介绍为什么它成为了汽车行业的关键技术近年来,汽车行业正在迅速发展,面临着越来越多的挑战和机遇。
作为汽车电子系统的核心技术之一,ARM架构在汽车领域的广泛应用使其成为了这个行业的关键技术。
本文将介绍ARM架构的基本概念和特点,并探讨为何ARM成为了汽车行业的关键技术。
一、ARM架构的基本概念和特点ARM(Advanced RISC Machine)架构是一种精简指令集计算机(RISC)架构,其设计初衷是为了提供高性能的处理器,同时降低功耗和成本。
ARM架构的核心设计思想是简化指令集和硬件结构,通过精简指令集和精简设计来提高指令执行速度和能效比。
以下是ARM架构的几个基本特点:1. 简洁而功能强大:ARM架构通过简化指令集,能够更高效地执行指令,从而提高处理器的性能。
尽管指令集简化了,但ARM处理器仍然具备强大的计算和控制能力。
2. 低功耗:由于ARM架构的设计目标是在提供高性能的同时降低功耗,因此ARM处理器具有出色的能效比。
在汽车领域,低功耗的处理器可以延长电池寿命或降低燃油消耗,提供更长的续航里程。
3. 可定制性强:ARM架构具有高度可定制性,可以针对不同应用场景进行优化。
在汽车行业,厂商可以基于ARM架构开发自己的处理器,以满足不同车型和功能的需求。
二、ARM在汽车行业的应用作为一项关键技术,ARM在汽车行业的广泛应用体现在以下几个方面:1. 智能驾驶系统:智能驾驶是汽车行业的一个重要发展方向,需要强大的计算能力和复杂的算法支持。
基于ARM架构的处理器可以高效地进行数据处理和算法运算,满足智能驾驶系统对处理能力和实时性的要求。
2. 信息娱乐系统:现代汽车的信息娱乐系统已经不再局限于传统的音频播放和导航功能,而是变得更加丰富和复杂。
ARM处理器提供了足够的计算能力和多媒体支持,可以实现高清视频播放、图像处理和车载应用的运行。
3. 车身电子系统:ARM架构在车身电子系统中的应用日益广泛,例如车身控制单元(BCU)、门控单元(GCU)和灯光控制器等。
基于ARM嵌入式系统的设计及其应用ARM嵌入式系统是一种基于ARM架构设计的嵌入式计算系统。
ARM架构有着低功耗、高性能和高度可扩展性的特点,所以广泛应用于嵌入式系统。
本文将探讨ARM嵌入式系统的设计原理和其在各个领域的应用。
首先,ARM嵌入式系统的设计需要考虑以下几个方面。
首先是硬件设计,包括选择ARM核心的版本和配置,以及外围设备的选择和接口定义。
其次是软件设计,包括操作系统、驱动程序和应用软件的开发。
最后是系统集成和测试,将硬件和软件进行结合,开展系统级的调试和验证。
ARM嵌入式系统的应用场景非常广泛,下面将介绍几个典型的应用领域。
1.智能手机和平板电脑:ARM嵌入式系统在智能手机和平板电脑上得到了广泛的应用。
其低功耗和高性能的特点使得这些设备具有长久的电池续航时间和流畅的用户体验。
2.物联网:ARM嵌入式系统在物联网领域也有着重要的应用。
它可以用于连接各种智能设备,如智能家居、智能工业设备等,实现设备之间的通信和数据交换。
3.汽车电子:ARM嵌入式系统在汽车电子领域得到了广泛的应用。
它可以用于驱动系统、车载娱乐系统以及车载通信系统等。
ARM嵌入式系统的低功耗和高性能可以提供更好的性能和用户体验。
4.工业控制:ARM嵌入式系统在工业控制领域也有着重要的应用。
它可以用于监控和控制系统,实现自动化生产和设备的远程监控。
5.医疗设备:ARM嵌入式系统在医疗设备领域也得到了广泛的应用。
它可以用于心率监测、血压监测等医疗设备。
ARM嵌入式系统的低功耗和高性能可以提供可靠的性能和长久的使用时间。
总的来说,ARM嵌入式系统在各个领域具有广泛的应用。
其低功耗、高性能和高度可扩展性的特点使得它成为了嵌入式系统设计的首选。
而且,随着技术的不断发展,ARM嵌入式系统将会在更多的领域得到应用,为各行业带来更高效、更智能的解决方案。
艋基于ARM和WinCE的车载导航系统设计■武汉科技大学■中国地质大学邹卫峰陈和平陈彬张剑波…一一介绍一个基于ARM和WinCE的嵌入式车载导航系统,主要描述系统的硬件组成、软件架构及其实现的关键技术。
系统以稳定的硬件设备和可裁减的操作系统为基础,结合GPS定位信息和电子地图数据,为驾驶者提供实时定位、地图显示、智能寻径以及语音导航等功能。
通过在武汉市进行的行车试验表明,该系统很好地实现了各项功能,达到了预期目的。
关键词车载导航系统嵌入式系统ARMWinCE全球定位系统为42s/38s/8s,捕获时间小于0.1s,刷新时间为1S,定引言车载导航系统是为驾驶者提供定位和引导服务的汽位准度范围最大为10m,数据输出格式为NMEA0183。
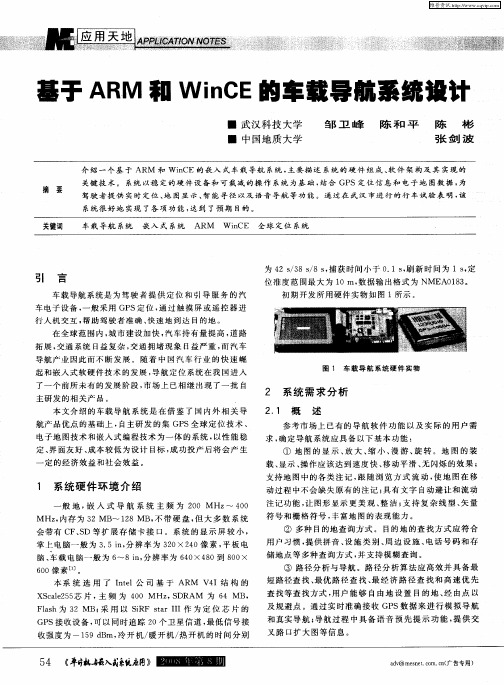
初期开发所用硬件实物如图1所示。
车电子设备,一般采用GPS定位,通过触摸屏或遥控器进行人机交互,帮助驾驶者准确、快速地到达目的地。
在全球范围内,城市建设加快,汽车持有量提高,道路拓展,交通系统日益复杂,交通拥堵现象日益严重,而汽车导航产业因此而不断发展。
随着中国汽车行业的快速崛起和嵌入式软硬件技术的发展,导航定位系统在我国进入了一个前所未有的发展阶段,市场上已相继出现了一批自主研发的相关产品。
本文介绍的车载导航系统是在借鉴了国内外相关导航产品优点的基础上,自主研发的集GPS全球定位技术、电子地图技术和嵌入式编程技术为一体的系统,以性能稳定、界面友好、成本较低为设计目标,成功投产后将会产生一定的经济效益和社会效益。
图1车载导航系统硬件实物22.1系统需求分析概述参考市场上已有的导航软件功能以及实际的用户需求,确定导航系统应具备以下基本功能:①地图的显示、放大、缩小、漫游、旋转。
地图的装载、显示、操作应该达到速度快、移动平滑、无闪烁的效果,支持地图中的各类注记,跟随浏览方式流动,使地图在移1系统硬件环境介绍一般地,嵌入式导航系统主频为200MHz~400动过程中不会缺失原有的注记;具有文字自动避让和流动注记功能,让图形显示更美观、整洁;支持复杂线型、矢量MHz,内存为32MB~128MB,不带硬盘,但大多数系统会带有CF、SD等扩展存储卡接口。

cortex m4Cortex M4是一款基于ARM架构的高性能微控制器。
它是ARM 公司针对嵌入式系统设计而推出的,具备先进的计算能力和低功耗特性。
本文将介绍Cortex M4的基本架构、主要特性和应用领域,以及Cortex M4在嵌入式系统设计中的优势。
一、Cortex M4架构Cortex M4采用了Harvard结构和精简指令集(RISC)的架构,其中包含了多个阶段的流水线以提高指令的执行效率。
它具备高效的取指令、译码、执行和访存能力,并且支持多级中断、异常处理和低功耗模式。
Cortex M4的核心包括处理单元(CPU)、内存和外设接口。
CPU负责指令的执行和数据的处理,内存用于存储指令和数据,而外设接口则用于与外部器件进行通信。
这种分层设计使得Cortex M4能够实现高度的灵活性和可扩展性,适用于各种不同的应用领域。
二、Cortex M4的主要特性1. 高性能处理能力:Cortex M4内置了高性能的浮点单元(FPU),可以加速浮点运算和数字信号处理(DSP)的计算。
该特性使得Cortex M4在实时控制和信号处理应用中表现出色。
2. 低功耗设计:Cortex M4采用了先进的低功耗设计技术,包括动态电压频率调节(DVFS)、大部分模块的时钟门控和多级睡眠模式等。
这些功能使得Cortex M4能够在功耗要求严格的应用中保持高性能。
3. 多级中断支持:Cortex M4的中断控制器具有多级中断的能力,可以灵活地处理不同优先级的中断请求。
这使得Cortex M4适用于实时控制应用,能够及时响应关键事件。
4. 丰富的外设接口:Cortex M4内置了丰富的外设接口,包括通用串行接口(UART)、通用同步/异步接口(SPI/I2C)、通用输入/输出口(GPIO)等。
这些接口可以方便地与其他器件进行通信,扩展系统的功能。
三、应用领域Cortex M4在嵌入式系统设计中被广泛应用。
以下是一些典型的应用领域:1. 工业自动化:Cortex M4可以用于工业自动化领域的实时控制和数据处理任务。
摘要对于小车的控制,即是对于电机的控制。
电机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中,所以怎么更好的对电机进行控制就显得尤为重要。
基于Cortex- M3内核的STM32F10x系列芯片是新型的32位嵌入式微处理器,其性能优良,移植性好,提高了对直流电机的控制效率,并对控制系统进行模块化设计,有利于智能小车的功能扩展和升级。
本论文主要分析了基于STM32F103的小车控制系统的设计过程。
此系统主要包括STM32F103控制器、液晶显示电路、键盘控制电路、电机驱动电路、红外探测电路、触角检测电路等。
以STM32F103主控芯片及其外围扩展电路实现系统整体功能;小车基本运动模式的选择及速度调节用按键开关式的键盘输入实现;同时液晶模块实时显示小车运动参数;用红外探测电路实现小车循迹功能;用触角传感检测模块实现小车简单避障功能。
在硬件设计的基础上提出了实现电机控制功能、LCD显示功能及小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境IAR EWARM 5.3下编写了控制程序。
关键词:PWM,STM32F103,电机,传感器ABSTRACTThe controlling to the car is the controlling to the motor. As a mechanical and electrical energy conversion devices, motor has been applied in every field of national economy and people's daily life, therefore, how to control the motor better is particularly important. The STM32F10x series chip based on Cortex-M3 kernel is the new 32-bit embedded MCU, which have the good performance and portability, and the STM32F10x have improved the efficiency of DC motor control, furthermore, the modular design of control system is helpful for function expansion and upgrades.This paper mainly analyzes the design process of the ca r’s control system ,which uses the STM32F103 as a master chip. This system primarily contains the STM32F103 controller, LCD circuit, the control circuit of keyboard, the circuit of motor-driven, the infrared detection circuit, the circuit of tentacles sensor etc. In this design, the whole system is controlled by the chip STM32F103 and its peripheral extended circuit; the basic model’s selection and spe ed accommodation can realize by the input of keyboard; at the moment , LCD module display the car’s mov ing parameters real-timely; the infrared detection realize car’s tracing function; tentacles sensor module complete the car’s simple obstacle-avoidance function. Based on Hardware design, the paper puts forward a software design scheme to realize the motor controlling, LCD display function , t he car’s simple trac e and obstacle avoidance function. Then the control code is written on IAR EW ARM 5.3 which is an IDE of STM32F103.KEY WORDS: PWM, STM32F103, motor, sensor目录前言 (1)第1章绪论 (2)1.1 STM32芯片介绍 (2)1.1.1STM32处理器的分类 (2)1.1.2 STM32处理器的内部结构及特点 (3)1.1.3 TIMx定时器介绍 (4)1.2 小车及其驱动器介绍 (6)1.2.1 小车结构及功能简介 (6)1.2.2 电机驱动电路简介 (7)第2章小车控制系统硬件设计 (9)2.1 系统功能实现及需求分析 (9)2.2 主要电路设计 (10)2.2.1 STM32F103及外围电路设计 (10)2.2.2 电源电路设计 (12)2.2.3 电机驱动电路设计 (12)2.2.4 液晶显示电路设计 (13)2.2.5 键盘扩展电路设计 (14)2.2.6 触角探测电路设计 (15)2.2.7 红外探测电路设计 (15)第3章小车控制系统软件设计 (17)3.1 IAR开发环境介绍 (17)3.2 程序设计思路及部分模块程序 (18)3.2.1 程序设计思路 (18)3.2.2 按键子程序 (19)3.2.3 循迹子程序 (21)3.2.4 自由行走子程序 (22)3.2.5 LCD显示子程序 (23)第4章结论 (24)致谢 (25)参考文献 (26)附录 (27)前言随着计算机、微电子、信息技术的快速发展,智能化技术的开发速度越来越快,程度越来越高,广泛应用于海洋开发、宇宙探测、工农业生产、军事、社会服务、娱乐等各个领域。
基于ARM的汽车电子控制系统单元设计
随着电子控制系统单元(ECU)在汽车上广泛应用,汽车电子化程度越来越高。
电控系统的增加虽然提高了汽车的动力性、经济性和舒适性,但随之增加的复杂电路,必然导致车身布线庞大而且复杂,安装空间短缺。
同时,为了提高电控单元信息利用率,要求大批的数据信息能在不同的电子单元间共享,汽车综合控制系统中大量的控制信号也需要实时交换,不同功能电子控制系统单元间的数据通信变得越来越重要。
因此对电子控制系统单元的设计提出
随着电子控制系统单元(ECU)在汽车上广泛应用,汽车电子化程度越来越高。
电控系统的增加虽然提高了汽车的动力性、经济性和舒适性,但随之增加的复杂电路,必然导致车身布线庞大而且复杂,安装空间短缺。
同时,为了提高电控单元信息利用率,要求大批的数据信息能在不同的电子单元间共享,汽车综合控制系统中大量的控制信号也需要实时交换,不同功能电子控制系统单元间的数据通信变得越来越重要。
因此对电子控制系统单元的设计提出了越来越高的要求,不仅要求通信网络应具有通信速率高、准确、可靠性高的特点,同时要求控制模块上应具有控制实效性高、空间小等优点。
本文采用了基于CAN总线技术,设计开发了应用于汽车网络系统中的电子控制系统单元。
1 电子控制系统单元CAN通信模块的设计
根据CAN通信原理,电子控制系统单元CAN通信模块硬件主要由CAN控制器、CAN驱动器及中心微处理器构成。
传统的CAN通信模块采用51系列的单片机作为中心处理器,SJA1000作为CAN控制器,PCA82C250作为CAN驱动器。
这种方案所占空间大,外围接口扩展局限,同时功耗高。
本设计中,我们采用内嵌有CAN控制器的LPC2119和TJA1050总线驱动器构成电子控制系统单元的CAN通信模块。
LPC2119内带有ARM7内核,具有封装小、功耗低、多个32位定时器、4路10位AD C、2路CAN以及多达9个外部中断等优点。
TJA1050是Philips公司生产的,用以替代PCA82C250的高速CAN总线驱动器。
该器件提供了CAN控制器与物理总线之间的接口以及对CAN总线的差动发送和接收功能。
对于由"弱"终端构成的端节点,TJA1050外围的电阻和电容能改善系统的EMC性能。
实践证明,采用LPC2119和TJA1050构造CAN通信模块,外围扩展能力强,空间小,同时改进电磁辐射(EME)性能和抗电磁干扰(EMI)性能。
2 电子控制系统单元控制模块的设计
传统的"蜘蛛网式"控制模块,电路复杂,维修难度高。
本设计中,我们采用功率模块、人机通信模块、状态量输入模块的结合,构造出电子控制系统单元控制模块,提高了整个系统的可观性和实效性。
2.1 功率模块
考虑到汽车功率负载大及LPC2119的I/O口驱动的局限,系统中采用功率模块作为中心微处理器与功率负载之间的桥梁。
设计中,我们采用摩托罗拉公司生产的MC33888功率器件控制远光灯、近光灯、倒车灯、刹车灯。
MC33888内部集成有四路高端灯驱动器和8路继电器或发光二极管驱动器,是一个可控制网络,具有在板诊断、与微控制器通信报错能力及故障软化等优点。
考虑到车内灯和示廊灯的功率相对比较大,我们采用MC33487功率器件进行控制。
MC33487内部集成两路带有电流感应的20毫欧姆高端驱动器,电流输出4.5A.
感性负载以及大电流的短路保护是整个设计的难点。
MC33887具有功耗低、等待模式下电流25微安、输出电流超过8安的短路关断等优点,所以系统采用MC33887功率器件对电机、锁、天线、洗涤泵进行控制。
2.2 人机通信模块
为了提高驾驶员和乘客的舒适性、安全性,整个系统必须在人和机器之间建立良好的人机通信模块。
BC7281、键盘模块及外围的LED之间的结合,构造出人机通信模块。
BC7281是比高公司推出的16位数码管显示及键盘接口专用芯片。
该芯片通过外接移位寄存器(74HC164、74LS595等)可控制16位数码管或者128只独立的LED。
BC7281的驱动输出极性及输出时序均可通过软件进行控制,从而和各种驱动电路配合,适合任何尺寸的数码管。
通过人机通信模块,人的意识能够为机器所识别,同时机器也可以将一些相应的状态信息反馈到LED或者LCD上,达到人机通信的可视化效果。
2 3 状态量输入模块
状态量输入模块主要是将一些人为操作的效果(如大灯开关、转向灯开关)、车身状态(如车门、窗的开关)及内部状态信息(如油量、水温)反馈给中心处理器。
中心处理器对反馈信息进行分析处理,就可以准确判断本车所处的状况,并做出相应的操作。
外部状态信息可以分为开关量和模拟量。
通过一系列外围电路(如整形防颤电路),我们将开关量转换成CPU可识别的0V和+5V高低电平。
在模拟量处理上,先经过归一化处理电路,将水温、油量、气压、室温的变化转化为0V 到5V之间电信号,然后通过LPC2119内嵌的4路10位AD转换器转换成相应的数字量。
利用现有的CAN通信模块将这些数字量传输到驾驶员附近的电子控制系统单元,再经过D/A转换器,反应在仪器仪表上。
3 电子控制系统单元软件设计
对于LPC2119微处理器来说,CAN控制器完全是基于事件触发的,即在本身状态发生改变时,CAN控制器会将状态变化的结果告诉微处理器。
因此中心微处理器可以采用中断的方式或者轮询的方式对CAN控制器作出相应的处理。
各电子控制系统单元按规定格式和周期发送数据到总线上,同时根据需要各取所需的报文。
对于接收数据,本系统采用中断的方式实现,一旦中断发生,即将接收的数据自动装载到相应的报文寄存器中。
此时利用屏蔽滤波寄存器对接
收报文的标识符和预先在接收缓冲器初始化时设定的标识符进行有选择地逐位比较,只有标识符匹配的报文才能进入接收缓冲器,那些不符合要求的报文将被屏蔽于接收缓冲器外,从而减轻CPU处理报文的负担。
各电子控制系统单元的应用层程序都不一样,但是通信模块的应用程序基本上一致,可分为CAN初始化、发送数据、接收数据。
3.1 CAN初始化程序
CAN初始化程序主要用来实现CAN工作时的参数设置,其初始化主要内容包括:硬件使能CAN、设置CAN报警界限、设置总线波特率、设置中断工作方式、设置CAN验收滤波器的工作方式、设置CAN控制器的工作模式等。
2 发送数据程序
对CAN模块初始化成功后,就可以用它来传送报文。
节点向总线上发送报文的过程是:LPC2119将待发送的数据按CAN格式组成一帧报文,写入CAN 模块发送缓冲区,然后启动发送命令,将报文发送到总线上。
在使用发送函数时有一点必须注意,因为在启动发送数据的命令后,CAN 控制器要将缓冲区内的数据发送完毕后,才会将该帧数据是否发送成功的状态返回。
这样如果在函数里一直等待数据发送完毕,会使整个微处理器的性能下降。
为了避免这种情况,该函数在启动发送后便立即返回,通过发送中断或者利用查询TCS状态位判断是否发送成功。
3.3 接收数据程序
本设计中,我们采用中断的方式进行CAN总线上的数据接收。
当
LPC2119的CAN控制器出现内部中断时,我们先识别中断寄存器的RI位,判断是否为接收中断,然后读取接收缓冲区的内容。
4 结论
实践证明,基于CAN总线技术,带ARM7内核的汽车电子控制系统单元空间小,实效性高。
特别是它的数据通信具有很强的实时性、更高的可靠性和更好的抗干扰能力,即使在重负荷下也不会出现网络瘫痪的情况,但投入实用化仍需要进一步的研究和改进,且程序的通信处理能力、纠错和容错能力有待进一步的提高。