理论力学-空间任意力系
- 格式:ppt
- 大小:2.41 MB
- 文档页数:45
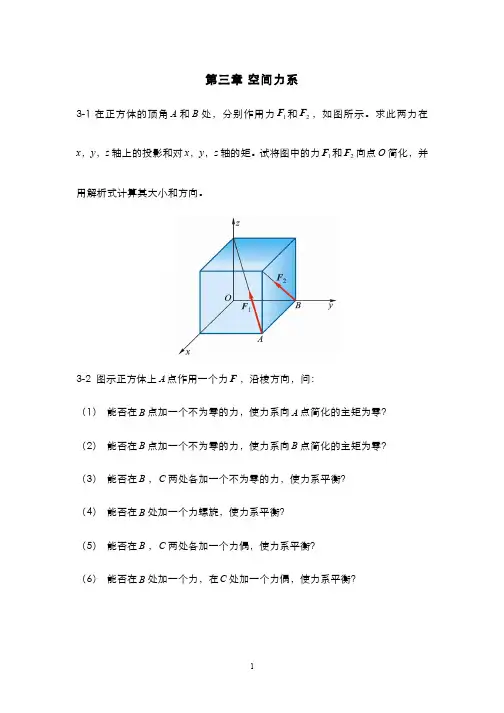
第三章 空间力系3-1 在正方体的顶角A 和B 处,分别作用力1F 和2F ,如图所示。
求此两力在x ,y ,z 轴上的投影和对x ,y ,z 轴的矩。
试将图中的力1F 和2F 向点O 简化,并用解析式计算其大小和方向。
3-2 图示正方体上A 点作用一个力F ,沿棱方向,问:(1)能否在B 点加一个不为零的力,使力系向A 点简化的主矩为零?(2)能否在B 点加一个不为零的力,使力系向B 点简化的主矩为零?(3)能否在B ,C 两处各加一个不为零的力,使力系平衡?(4)能否在B 处加一个力螺旋,使力系平衡?(5)能否在B ,C 两处各加一个力偶,使力系平衡?(6)能否在B 处加一个力,在C 处加一个力偶,使力系平衡?3-3 图示为一边长为a的正方体,已知某力系向B点简化得到一合力,向Cᄁ点简化也得一合力。
问:(1)力系向A点和'A点简化所得主矩是否相等?(2)力系向A点和'O点简化所得主矩是否相等?3-4 在上题图中,已知空间力系向'B点简化得一主矢(其大小为F)及一主矩(大小、方向均未知),又已知该力系向A点简化为一合力,合力方向指向O点试:(1)用矢量的解析表达式给出力系向'B点简化的主矩;(2)用矢量的解析表达式给出力系向C点简化的主矢和主矩。
3-5 (1)空间力系中各力的作用线平行于某一固定平面;(2)空间力系中各力的作用线分别汇交于两个固定点。
试分析这两种力系最多能有几个独立的平衡方程。
3-6 传动轴用两个止推轴承支持,每个轴承有三个未知力,共6个未知量。
而空间任意力系的平衡方程恰好有6个,是否为静定问题?3-7 空间任意力系总可以由两个力来平衡,为什么?3-8 某一空间力系对不共线的三点主矩都为零,问此力系是否一定平衡?3-9 空间任意力系向两个不同的点简化,试问下述情况是否可能?(1)主矢相等,主矩相等。
(2)主矢不相等,主矩相等。
(3)主矢相等,主矩不相等。

·36·第4章 空间力系一、是非题(正确的在括号内打“√”、错误的打“×”)1.力在坐标轴上的投影是代数量,而在坐标面上的投影为矢量。
( √ )2.力对轴之矩是力使刚体绕轴转动效应的度量,它等于力在垂直于该轴的平面上的分力对轴与平面的交点之矩。
( √ )3.在平面问题中,力对点之矩为代数量;在空间问题中,力对点之矩也是代数量。
( × )4.合力对任一轴之矩,等于各分力对同一轴之矩的代数和。
( √ )5.空间任意力系平衡的必要与充分条件是力系的主矢和对任一点的主矩都等于零。
( √ ) 6.物体重力的合力所通过的点称为重心,物体几何形状的中心称为形心,重心与形心一定重合。
( × ) 7.计算一物体的重心,选择不同的坐标系,计算结果不同,因而说明物体的重心位置是变化的。
( × ) 8.物体的重心一定在物体上。
( × )二、填空题1.空间汇交力系共有三个独立的平衡方程,它们分别表示为0=∑xF、0=∑yF和0=∑zF 。
空间力偶系共有三个独立的平衡方程,它们分别表示为0=∑xM、0=∑yM和0=∑zM。
而空间任意力系共有六个独立的平衡方程,一般可表示为0=∑xF、0=∑yF、0=∑zF 、0)(=∑F xM 、 0)(=∑F yM 和0)(=∑F zM 。
2.由n 个力组成的空间平衡力系,如果其中的(n -1)个力相交于A 点,那么另一个力也必定通过点A 。
3.作用在同一刚体上的两个空间力偶彼此等效的条件是力偶矩矢相等。
4.空间力对一点的矩是一个矢量,而空间力对某轴的矩是一个代数量。
5.空间力F 对任一点O 之矩)(F M O 可用矢量积来表示,即F r F M ⨯=)(O 。
写成解析表达式为k j i F M )()()()(x y z x y z O yF xF xF zF zF yF -+-+-=。
6.当空间力与轴相交时,力对该轴的矩等于零。
2、空间任意力系的平衡方程及常见的空间约束空间任意力系平衡的充要条件:空间任意力系的平衡方程:00xy z F FF ===ååå00xyzMMM===ååå空间任意力系平衡的充要条件:力系中各力在任一坐标轴上的投影的代数和等于零,以及各力对每一个坐标轴的力矩的代数和也等于零.该力系的主矢、主矩分别为零.(1) 空间任意力系的平衡方程(基本式)常见的空间约束00xy z F FF===ååå00xyzM M M ===ååå空间任意力系的平衡方程(基本式)平衡方程除了基本式之外,还有四矩式、五矩式、六矩式。
有几个力矩平衡方程,称之为几矩式。
各种形式应该根据实际情况灵活运用。
基本式以外的方程形式,通常不再给限定条件,一般的情况下只要列出的方程能求解出未知量即是未违反限制条件。
常见的空间约束00zxyF MM===ååå空间平行力系的平衡方程各种力系的独立平衡方程个数空间任意力系6个空间汇交力系3个空间平行力系3个空间力偶系3个平面任意力系3个平面汇交力系2个平面平行力系2个平面力偶系2(1)个最一般情形:空间、任意一级特殊情形(包含一种特殊情况):空间问题+特殊力系,或者任意力系+平面情形二级特殊情形(包含两种特殊情况):平面问题+特殊力系。
2、空间任意力系的平衡方程及常见的空间约束(2) 空间常见约束类型柔索二力杆2、空间任意力系的平衡方程及常见的空间约束2、空间任意力系的平衡方程及常见的空间约束径向轴承圆柱铰链铁轨蝶铰链球铰链导向轴承带有销子的夹板导轨空间任意力系及重心的计算f. 6个未知约束量空间固定端约束分析实际的约束时,需要忽略一些次要因素,抓住主要因素,做一些合理的简化。
比如导向轴承和径向轴承之间的区别;蝶铰链和止推轴承之间的区别。
如果刚体只受平面力系的作用,则垂直于该平面的约束力和绕平面内两轴转动的约束力偶都应该为零,相应减少了约束量的数目。
1第3章 力系的平衡 3.1 主要内容空间任意力系平衡的必要和充分条件是:力系的主矢和对任一点的主矩等于零,即 0=R F 0=O M 空间力系平衡方程的基本形式 0,0,0=∑=∑=∑z y x F F F 0)(,0)(,0)(=∑=∑=∑F F F z y x M M M空间汇交力系平衡的必要和充分条件是:力系的合力 0=R F空间汇交力系平衡方程的基本形式0,0,0=∑=∑=∑z y x F F F空间力偶系平衡的必要和充分条件是:各分力偶矩矢的矢量和 0=∑i M空间力偶系平衡方程的基本形式 0)(,0)(,0)(=∑=∑=∑F F F z y x M M M平面力系平衡的必要和充分条件:力系的主矢和对于任一点的主矩都等于零,即:0=∑='F F R;0)(=∑=F O O M M 平面力系的平衡方程有三种形式:基本形式: 0)(,0,0=∑=∑=∑F M F F O y x二矩式: 0)(,0)(,0=∑=∑=∑F M F M F B A x (A 、B 连线不能与x 轴垂直)三矩式: 0)(,0)(,0=∑=∑=∑F M F M M C B A (A 、B 、C 三点不共线)平面力系有三个独立的平衡方程,可解三个未知量。
平面汇交力系平衡的必要和充分条件是合力为零,即0=∑=F F R 平衡的解析条件:各分力在两个坐标轴上投影的代数和分别等于零,即0,0=∑=∑y x F F两个独立的平衡方程,可解两个未知量。
平面力偶系平衡的必要和充分条件为:力偶系中各力偶矩的代数和等于零,即∑=0Mi一个独立的平衡方程,可解一个未知量。
3.2 基本要求1.熟练掌握力的投影,分布力系的简化、力对轴之矩等静力学基本运算。
2.能应用各种类型力系的平衡条件和平衡方程求解单个刚体和简单刚体系统的平衡问题。
对平面一般力系的平衡问题,能熟练地选取分离体和应用各种形式的平衡方程求解。
3.正确理解静定和超静定的概念,并会判断具体问题的静定性。