一种新型智能电子秤的设计
- 格式:pdf
- 大小:289.16 KB
- 文档页数:4
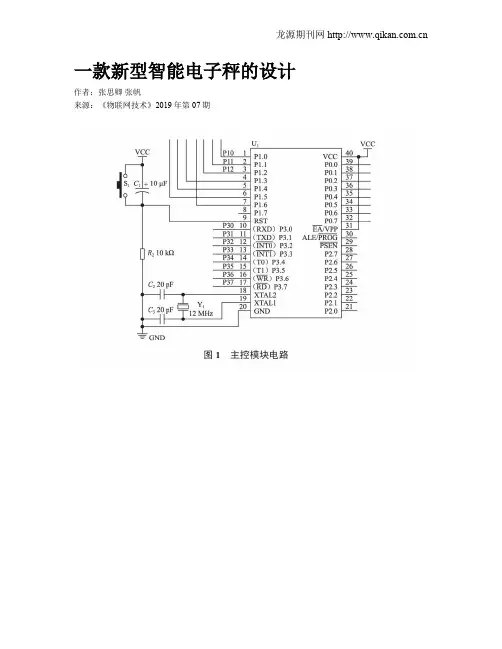
一款新型智能电子秤的设计作者:张思卿张帆来源:《物联网技术》2019年第07期摘要:基于STC89C52RC单片机的智能电子秤的设计分为三大板块,即硬件排版、布局设计,软件编写、下载、调试及产品焊接。
基于单片机的智能电子秤是以STC89C52RC单片机为核心的控制系统,单片机内下载软件程序对焊接完成的硬件电路进行指令控制,当硬件电路中的压力传感器检测到外界压力发生变化时,新型智能电子秤模数转换芯片HX711对压力传感器收到的信号进行模数转换,之后把数字信号传送到单片机进行数据处理,数据处理完成后通过液晶进行数据的直观显示,得到称重结果。
关键词:单片机;电子秤;传感器;HX711;模数转换;液晶显示中图分类号:TP23 文献标识码:A 文章编号:2095-1302(2019)07-00-030 引言本产品采用软硬件结合的方法,通过向单片机内下载软件程序来控制硬件电路实现各项电子秤的功能,在电子秤的基本功能基础上扩展了时钟万年历和超重报警等新功能。
新型电子秤称重系统可分为单片机最小工作系统、数据采集处理系统、人机交互界面操作系统、时钟万年历及超重报警系统等五部分[1]。
STC89C52RC单片机和经典复位电路组成了单片机的最小系统;信号放大、称重传感器和模数转换组成了数据采集部分,模数转换和信号放大功能则通过HX711芯片实现,HX711是一款专为高精度电子秤而设计的24位A模数转换器芯片,该芯片具有集成度高、响应速度快、抗干扰性强等特点;电子秤的人机交互操作界面通过手动矩阵键盘输入和数据液晶显示完成,即键盘输入单价,液晶显示屏显示称重数据;时钟模块由时钟芯片DS1302和时钟显示电路构成;LCD1602显示器可以切换显示时钟万年历;蜂鸣器具有报警功能,当称重物体超过5 kg时,蜂鸣器自动报警[2]。
1 系统总体设计电子秤是通过压力传感器检测物体的重量,经过信号转换和单片机的信息处理后,再控制硬件电路显示结果的电子衡器。
一种新型智能电子秤的设计杨纪明 吴军辉西安交通大学 西安:710049 摘 要 本文给出了一种新型智能电子秤的设计方案。
该系统以单片机作为中心控制单元,采用V F型模数转换、锁相倍频、非线性校正和数字滤波等技术。
关键词 电子秤 单片机 非线性校正 数字滤波Abstract T h is p ap er p resen ts a new design fo r the in telligen t electron ic scale.T he m icro2 con tro ller w as u sed as the cen tral con tro l un it in the system,the techn iques of V F conversi on, PPL m u lti p lex frequency,non-linear co rrecti on and digital filter w ere em p loyed.Keywords E lectron ic scale M icrocon tro ller N on linear co rrecti on D igital filter1 引言 随着科技的进步,对电子秤的要求也越来越高。
影响其精度的因素主要有:机械结构、传感器和数显仪表。
在机械结构方面,因材料结构强度和刚度的限制,会使力的传递出现误差,而传感器输出特性存在非线性,加上信号放大、模数转换等环节存在的非线性,使得整个系统的非线性误差变得不容忽视,因此,在高精度的称重场合,迫切需要电子秤能在线自动校正系统的非线性。
此外,为了保证准确、稳定地显示,仪器内部分辨率(主要是ADC的分辨率)一般要比外部显示分辨率高4倍以上,这就要求所采用的ADC具有足够的转换位数,而采用高精度的ADC,自然增加了系统的成本。
基于电子秤的现状,本文提出了一种用单片机控制的高精度智能电子秤设计方案。
基于MSP430的智能电子秤设计一、引言二、设计原理智能电子秤的设计原理主要基于电阻应变式传感器和单片机的控制与处理。
电阻应变式传感器将物体的重量转化为电信号,通过放大、滤波等电路处理后,输入到MSP430 单片机进行A/D 转换和数据处理。
MSP430 单片机根据预设的算法和程序,计算出物体的重量,并将结果显示在液晶显示屏上。
三、硬件组成1、传感器模块电阻应变式传感器:选用高精度的电阻应变式传感器,其灵敏度和线性度较好,能够准确地将重量转化为电信号。
信号调理电路:包括放大电路、滤波电路和稳压电路,用于对传感器输出的微弱电信号进行放大、滤波和稳压处理,以提高信号的质量和稳定性。
2、单片机模块MSP430 单片机:选用低功耗、高性能的 MSP430 单片机作为核心控制器,其具有丰富的片内资源和强大的运算能力,能够满足智能电子秤的控制和处理需求。
时钟电路:为单片机提供准确的时钟信号,保证其工作的稳定性和准确性。
复位电路:用于单片机的复位操作,确保系统在异常情况下能够正常启动。
3、显示模块液晶显示屏:选用液晶显示屏作为显示器件,能够清晰地显示物体的重量、单价、总价等信息。
驱动电路:用于驱动液晶显示屏的工作,将单片机输出的显示数据转换为液晶显示屏能够识别的信号。
4、按键模块功能按键:设置了去皮、清零、设置单价等功能按键,方便用户进行操作。
按键扫描电路:用于检测按键的按下状态,并将按键信息传输给单片机进行处理。
5、存储模块EEPROM 存储器:用于存储电子秤的校准参数、单价等信息,保证数据在掉电情况下不丢失。
6、通信模块蓝牙模块:可选配蓝牙模块,实现电子秤与手机、电脑等设备的无线通信,方便数据的传输和管理。
四、软件实现1、主程序流程系统初始化:包括单片机的初始化、传感器的初始化、显示模块的初始化等。
按键扫描:实时检测按键的按下状态,并执行相应的操作。
A/D 转换:对传感器输出的模拟信号进行 A/D 转换,得到数字信号。
基于单片机的实用电子秤设计一、硬件设计1、传感器选择电子秤的核心部件之一是称重传感器。
常见的称重传感器有电阻应变式、电容式等。
在本设计中,我们选用电阻应变式传感器,其原理是当物体的重量作用在传感器上时,传感器内部的电阻应变片会发生形变,从而导致电阻值的变化。
通过测量电阻值的变化,就可以计算出物体的重量。
2、信号放大与调理传感器输出的信号通常比较微弱,需要经过放大和调理才能被单片机处理。
我们使用高精度的仪表放大器对传感器输出的信号进行放大,并通过滤波电路去除噪声干扰,以提高测量的准确性。
3、单片机选型单片机是整个电子秤系统的控制核心。
考虑到性能、成本和开发难度等因素,我们选用 STM32 系列单片机。
STM32 系列单片机具有丰富的外设资源、较高的运算速度和良好的稳定性,能够满足电子秤的设计需求。
4、显示模块为了直观地显示测量结果,我们选用液晶显示屏(LCD)作为显示模块。
LCD 显示屏具有功耗低、显示清晰、视角广等优点。
通过单片机的控制,可以在 LCD 显示屏上实时显示物体的重量、单位等信息。
5、按键模块为了实现电子秤的功能设置,如单位切换、去皮、清零等,我们设计了按键模块。
按键模块通过与单片机的连接,将用户的操作指令传递给单片机进行处理。
6、电源模块电源模块为整个电子秤系统提供稳定的电源。
我们使用线性稳压器将输入的电源电压转换为适合各个模块工作的电压,以确保系统的正常运行。
二、软件算法1、重量计算算法根据传感器的特性和放大调理电路的参数,我们可以建立重量与传感器输出信号之间的数学模型。
通过对传感器输出信号的采集和处理,利用数学模型计算出物体的实际重量。
2、滤波算法为了消除测量过程中的噪声干扰,提高测量的稳定性和准确性,我们采用数字滤波算法对采集到的信号进行处理。
常见的数字滤波算法有中值滤波、均值滤波等。
在本设计中,我们选用中值滤波算法,其原理是对连续采集的若干个数据进行排序,取中间值作为滤波后的结果。
基于单片机的智能电子秤设计随着科技的不断发展,智能化和自动化已经成为我们生活中不可或缺的一部分。
在众多领域中,智能电子秤的设计与应用也越来越受到。
本文将介绍一种基于单片机的智能电子秤设计方案,该设计具有高精度、低成本、易于实现等优点,具有一定的实用价值。
一、概述智能电子秤是一种能够自动测量物体重量的设备,广泛应用于超市、菜市场等场所。
与传统的机械秤相比,智能电子秤具有测量精度高、使用方便、易于维护等优点。
而基于单片机的智能电子秤设计,更是将智能化和自动化技术融入到电子秤中,提高了设备的性能和可靠性。
二、设计原理基于单片机的智能电子秤设计主要是利用单片机的控制和数据处理能力,实现对物体重量的准确测量。
其核心部件为压力传感器和单片机。
压力传感器负责采集物体的重量信号,并将信号传输给单片机;单片机则对信号进行处理、分析和存储,同时控制显示屏显示物体的重量。
三、硬件设计1、单片机选择单片机是智能电子秤的核心部件,负责控制整个系统的运行。
本设计选用AT89C51单片机,该单片机具有低功耗、高性能、易于编程等优点,能够满足智能电子秤的设计要求。
2、压力传感器选择压力传感器是智能电子秤的重要组成部件,负责采集物体的重量信号。
本设计选用电阻应变式压力传感器,该传感器具有测量精度高、稳定性好、抗干扰能力强等优点。
3、显示模块选择显示模块负责将物体的重量信息呈现给用户。
本设计选用LED显示屏,该显示屏具有亮度高、视角广、寿命长等优点。
4、电源模块选择电源模块为整个系统提供稳定的电源,保证系统的正常运行。
本设计选用线性稳压电源,该电源具有输出电压稳定、纹波小、安全性高等优点。
四、软件设计软件设计是智能电子秤的关键部分之一,直接影响设备的性能和可靠性。
本设计的软件部分采用C语言编写,主要包括数据采集、数据处理、数据显示等模块。
具体流程如下:1、开机后,系统进行初始化操作;2、压力传感器采集物体的重量信号;3、单片机对采集到的信号进行处理和分析;4、单片机将处理后的数据存储到存储器中;5、单片机控制LED显示屏显示物体的重量信息;6、系统继续等待下一次测量。
基于单片机的智能电子秤控制系统的设计智能电子秤控制系统是一种集成数字电子技术、传感技术、自动控制技术于一体的高精度、高可靠性的电子秤系统。
本文将介绍基于单片机的智能电子秤控制系统的设计原理及实现方法。
一、系统设计原理基于单片机的智能电子秤控制系统主要由称重传感器、AD转换模块、单片机、LCD显示模块和通信接口模块等组成。
其工作原理如下:1. 称重传感器智能电子秤的核心部件是称重传感器,用于将物体的重量转换为电信号。
常用的称重传感器有应变式、电阻式、电容式等。
它们能够根据物体的质量变化而改变输出电信号,作为下一步处理的输入信号。
2. AD转换模块AD转换模块用于将模拟信号转换为数字信号,通过单片机进行处理。
通过AD转换模块,可以将称重传感器输出的模拟信号转换为单片机可以理解的数据,为后续的数据处理提供基础。
3. 单片机单片机是整个智能控制系统的核心,负责接收AD转换模块的信号,并进行数据处理,并通过LCD显示模块将结果实时显示出来。
同时,单片机还可以通过通信模块与其他设备进行数据交互。
4. LCD显示模块LCD显示模块用于将称重结果以数字形式显示出来,提供直观的测量结果给用户。
5. 通信接口模块通信接口模块允许智能电子秤与其他设备进行数据交互,如与计算机进行连接,实现数据的上传和下载。
二、系统设计方法基于单片机的智能电子秤控制系统的设计可以按照以下步骤进行:1. 硬件设计根据系统的功能需求,选择适当的称重传感器和AD转换模块,并通过电路设计将其与单片机和LCD显示模块进行连接。
此外,根据实际需求选择合适的通信接口模块。
2. 软件设计编写单片机的控制程序,包括AD转换的初始化和读取、数据处理、LCD显示等功能。
根据实际需求,可以添加一些额外的功能,如单位选择、重量校准等。
3. 系统测试将硬件和软件进行组装后,进行系统测试。
通过放置不同重量的物体进行秤量,检查显示结果的准确性和稳定性。
同时,测试通信功能是否正常工作。
摘 要要智能电子秤是将检测与转换技术、计算机技术、信息处理、数字技术等技术综合一体的现代新型称重仪器。
它与我们日常生活紧密结合成为一种方便、快捷、称量精确的工具,广泛应用于商业、工厂生厂、集贸市场、超市、大型商场、及零售业等公共场所的信息显示和重量计算。
智能电子称主要以单片机作为中心控制单元,通过称重传感器进行模数转换单元,在配以键盘、显示电路及强大软件来组成。
该电子称不但计量准确、快速方便,更重要的自动称重、计价功能外,还能自动计算,数字显示,受到广大用户欢迎。
智能电子称由于携带方便,使用简单,对人们生活的影响越来越大。
本系统是针对是电子称的自动称重、自动计价、数据处理进行研究的。
为了阐明用单片机是如何对采样数据进行处理,对数据的采集和转换、计算问题进行了研究。
讨论了单片机控制系统中关键的中断、计算问题,结果表明通过软件设计实现更完善。
本文在给出智能电子称硬件设计的基础上,详细分析了电子称的软件控制方法。
由于单片机控制的电子称结构简单,成本低廉,深受人们的喜爱,本文将对此进行详细讨论。
关键词电子秤;单片机;A/D转换;称重传感器AbstractIntelligent electronic balance values detection and the modern new-type names of technical comprehensive one body such as conversion technical, computer technology, message handling and digital technology instrument. Its and our close combination of daily life becomes a kind of convenient, shortcut, weighing accurate tool , is applied extensively in commercial, factory raw factory , gathers trade market, supermarket and large scale market , the message of the etc. public place of retail trade shows and weight calculation.Intelligent electronic name passes through name mainly with single flat machine as central control unit, value sensor to carry out modulus conversion unit , it is matching with keyboard , show circuit and powerful software to form. It is accurate that this electron claims to not only measure , fast convenience, more important automatic name may still realize besides heavy, valuation function to remove the peel , completely / hair turns , calculate voluntarily, figure shows , is welcomed by masses of user. Intelligent electronic name since carry convenience, it is more and more big to use the simple influence for that people live.This system aims at is the automatic name of electronic name heavy, automatic valuation and data handling carry out research. To expound to use single flat machine , it is to how to carry out handling for sampling data , is for the collection of data and conversion and calculation problem has studied. Have discussed the suspension of the key in single flat machine control system , calculate problem , show as a result that through software design, realization is perfected more. This text is weighing the foundation of hardware design to intelligent electron , has analysed the software control method of electronic name in detail. Since the electron of single flat machine control weighs structure, is simple, cost is cheap, receive deeply people like , this text will carry out detailed discussion for this.KeywordsIntelligence electronic weighing ; MCU;A/D converter;weighing sensor ;目 录要 (I)摘 要Abstract (II)绪论 (1)1. 智能电子秤系统的概况 (2)1.1 电子秤的发展史 (2)1.2 智能电子秤应用范围 (2)1.3智能电子秤的研究动态 (2)2.智能电子秤的工作原理 (4)2.1 智能电子秤性能及技术要求 (4)2.2 工作原理 (4)2.3 基本结构 (4)3 智能电子秤的硬件设计 (5)3.1信号采集电路 (5)3.2 单片机控制系统 (7)3.3键盘显示接口电路 (10)4 智能电子秤的软件设计 (13)4.1主程序设计 (13)4.1.1主程序设计思路 (13)4.1.2 主程序工作原理 (14)4.1.3 主程序流程框图 (15)4.2系统初始化 (16)4.2.1 AT89C52的初始化 (16)4.2.2 8279的初始化 (18)4.2.3 ICL7109的初始化 (18)4.3 A/D转换结果处理程序 (18)4.3.1 A/D转换过程 (18)4.3.2采样数据处理 (19)4.4 键盘与显示处理程序 (19)4.4.2 键盘模块 (20)4.5数据处理程序 (23)4.5.1 重量输出 (23)4.5.2 置零 (23)5机械部分 (25)5.1设计原理 (25)5.2各个零部件的作用 (27)结 论 (28)致 谢 (30)参考文献 (31)附录一 系统主程序 (32)绪论随着科学技术和经济的发展,出售商品品种的增加,需要称量物品的设备也需要更新换代,人们对称重装置的要求也越,电子称重装置推广,从而进入到传感器,电子学和微处理机领域、使得称重装置变成为电子仪器。
一种高精度便携式电子秤的设计
电子秤与传统机械秤比较,其技术性能趋向精度高、速率快、稳定性好、使用简便;其功能趋向智能化,应用性能趋向于综合性。
目前,在商业贸易中使用的传统台式电子秤,存在较大的局限性,精度低、体积大、携带不便、应用场所受到制约。
为了解决这些问题,本文运用传感器技术,计算机技术结合数据处理技术,设计一款便携式电子秤一体的新型智能计量设备。
1、系统硬件设计
系统在充分考虑实用性性价比和性价比的前提下,完成了电子称的方案设计,按照功能分为为个部分:控制器部分、测量部分、数据显示部分、键盘部分和电路电源部分,总体方案框图如图1所示。
系统重量检测部分是利用称重传感器检测压力信号,得到微弱的电压信号,而后经处理电路(如滤波电路,差动放大电路)处理后,送单片机中的A/D转换器,将模拟量转化为数字量输出,控制器接受来自A/D转换器输出的数字信号,经过运算,将数字信号转换为物体的实际质量信号,并将其送到显示单元中。
图1 系统总体方案
1.1、数据采集模块。

实用电子秤的设计与制作一、引言电子秤是一种能够测量物体质量的装置,它通过将电流通过物体,并测量电流通过物体所产生的电阻来计算物体的质量。
电子秤通常由传感器、电子机械与显示器组成。
传感器用于测量电阻,电子机械用于将电流通过物体,显示器则用于显示质量的数值。
本文将介绍一个实用电子秤的设计与制作。
二、设计与制作步骤1.材料准备电子秤的材料包括传感器、电子机械和显示器。
传感器可以选择四个应变片组成的电桥传感器,电子机械可以选择脉冲宽度调制方式的推力电机,显示器可以选择7段LED显示屏。
此外,还需要准备电源、线路板和电子元件,如电阻和电容。
2.传感器连接将四个应变片组成电桥传感器。
首先,将每个应变片焊接在金属膜上,再将膜片固定在称盘的四个角上。
接下来,将应变片的一端与称盘固定在一起,另一端与电桥电路连接。
电桥电路由四个电阻组成,将电桥的输出连接到放大器电路。
3.电子机械设计电子机械部分由脉冲宽度调制方式的推力电机组成。
根据物体质量的不同,通过改变电机的脉宽来改变电流的大小。
电机的转速与质量成正比。
为了实现这一点,需要通过微控制器来控制电机的输出电流。
电机的输出轴与称盘相连,负责将电流传递到物体上。
4.显示和控制部分设计将放大器电路和微控制器连接在一起,以实时测量传感器输出的电流。
微控制器将读取的电流转换为质量数值,并通过7段LED显示屏显示。
此外,还可以添加按键和EEPROM存储器,以实现更多的功能,如单位切换和数据存储。
5.电源设计为了提供正常运行所需的电能,电子秤需要一种稳定的电源。
可以选择使用市电直接供电,或者使用电池作为电源。
如果使用电池,则需要添加电池低压保护电路和充电电路。
三、制作过程1.将传感器组装在称盘上,并连接电桥电路。
2.设计和制作电子机械部分,将电机与称盘相连。
3.设计和制作放大器电路和微控制器电路,并将它们连接在一起。
4.设计和制作显示部分,将7段LED显示屏连接到微控制器。
5.设计和制作电源部分,将电源电路连接到电子秤的电路中。
智能电子秤方案1. 引言智能电子秤是一种能够精确测量物体重量的设备,广泛应用于商业领域的称重需求。
随着物联网技术的快速发展,智能电子秤可以通过互联网连接,实现远程监测和数据分析功能,为企业提供更加智能化的管理和服务。
本文将介绍一种智能电子秤方案,包括硬件设计、软件开发和系统集成等主要内容。
2. 硬件设计2.1 传感器选择智能电子秤的核心部件是传感器,传感器负责检测物体的重力,将其转换为电信号。
常用的传感器包括压力传感器、电阻应变传感器等。
根据具体的应用场景和精度要求,选择合适的传感器非常重要。
2.2 电路设计智能电子秤的电路设计包括信号放大电路、模数转换电路、滤波电路等。
信号放大电路用于放大传感器输出的微弱信号,模数转换电路则将模拟信号转换为数字信号,滤波电路用于去除噪声干扰。
电路设计需要考虑功耗、稳定性和抗干扰能力等因素。
2.3 通信模块为了实现智能化功能,智能电子秤需要具备通信能力。
通信模块可以选择Wi-Fi、蓝牙或者NFC等无线通信技术。
通过与云端服务器的连接,实现数据上传、远程控制和固件升级等功能。
3. 软件开发3.1 嵌入式软件智能电子秤的嵌入式软件负责控制硬件、处理传感器数据和与通信模块交互。
根据具体需求,可以选择C语言、Python等编程语言进行开发。
嵌入式软件需要具备重量测量算法、数据处理算法和错误校正算法等。
3.2 云端平台智能电子秤通过通信模块与云端平台连接,实现数据上传和远程控制等功能。
云端平台可以使用开放源代码的物联网平台,也可以自己搭建私有云平台。
云端平台需要具备数据存储、数据分析和远程管理等功能。
3.3 移动应用为了方便用户使用和管理智能电子秤,可以开发移动应用程序。
移动应用可以提供实时监测、历史数据查询和远程控制等功能。
移动应用的开发可以选择原生开发或者跨平台开发,根据用户群体和需求来决定。
4. 系统集成将硬件和软件进行集成,完成智能电子秤的制造和调试。
在制造过程中需要考虑产品外观设计、材料选择和制造工艺等因素。
《一种新型智能电子秤系统的开发》方案设计系统总体方案设计主要包括硬件电路设计、单片机控制程序设计及APP软件功能设计三部分。
硬件电路主要由复位电路、压力传感器及A/D转换模块、蓝牙模块、矩阵键盘、单片机5部分构成,借鉴引用了传统的电子秤硬件设计。
单片机程序设计是整个设计的关键部分,APP软件功能设计分为不同的功能界面。
单片机采用了STC89C52,其是宏晶科技推出的一种低功耗、高性能CMOS8位微控制器,价格低廉,且能够实现本设计的功能[5]。
压力传感器采用应变式压力传感器,其精度高、结构简单紧凑、抗偏载能力强,其输出电压和压力成正比,斜率稳定,因此易于实现将重量转变成电信号输出[6]。
HX711是专为高精度电子秤而设计的24位A/D转换器芯片,具有集成度高、响应快、抗干扰能力强等优点[7],与压力传感器结合使用效果佳。
HC⁃05是一款性价比较高的蓝牙模块,完全兼容单片机系统,可实现单片机数据的收发,因此选择它作为系统的無线通信桥梁。
2.1 单片机控制方案为了使得系统可以一直读取重量数据并显示,在液晶初始化和串口初始化后,进入循环读取、显示流程,读取HX711 A/D转换后的数值,存放到当前A/D数值变量;扫描矩阵键盘,判断是否有按键按下,根据按键值和系统设置模式进行相应的响应;将HX711传输的A/D数值转换成重量,再计算总价;然后根据显示模式,显示对应的主界面、改单价界面、改折扣界面、校准界面中;最后返回读取HX711数值的操作,如图3所示。
2.2 APP设计方案APP主要有5个界面,登录注册界面、接收界面、查看历史记录界面、统计数据界面、扫描付款界面,关系如图4所示。
接收界面是关键部分,为历史记录和统计提供数据。
为了提高电子秤的实用性,方便付款,增加了扫描二维码进入微信支付功能。
本设计所有数据都保存在手机微数据库中,相当于一个单机版软件,无论是本机微数据库还是联网的服务器数据库,都是采取键值对的存取方式。
基于单片机的智能电子秤设计在现代社会,电子秤作为一种重要的测量工具,广泛应用于商业、工业、农业以及日常生活等各个领域。
随着科技的不断发展,人们对电子秤的功能和性能提出了更高的要求,智能电子秤应运而生。
智能电子秤不仅能够准确测量物体的重量,还具备了数据处理、存储、传输以及智能化控制等功能,为人们的生产和生活带来了极大的便利。
本文将介绍一种基于单片机的智能电子秤设计方案。
一、系统总体设计本智能电子秤系统主要由称重传感器、信号调理电路、单片机、显示模块、键盘模块以及通信模块等部分组成。
称重传感器负责将物体的重量转换为电信号,信号调理电路对传感器输出的微弱信号进行放大、滤波等处理,以提高信号的质量。
单片机作为系统的核心,负责对处理后的信号进行采集、计算和处理,并控制其他模块的工作。
显示模块用于实时显示物体的重量和相关信息,键盘模块用于输入操作指令,通信模块则用于将测量数据传输到上位机或其他设备。
二、硬件设计1、称重传感器称重传感器是电子秤的关键部件,其性能直接影响测量精度。
本设计选用电阻应变式称重传感器,该传感器具有精度高、稳定性好、结构简单等优点。
电阻应变式称重传感器的工作原理是基于电阻应变效应,当传感器受到外力作用时,其弹性体发生变形,从而导致粘贴在弹性体上的电阻应变片的电阻值发生变化。
通过测量电阻应变片电阻值的变化,即可得到外力的大小。
2、信号调理电路由于称重传感器输出的信号非常微弱,通常只有几毫伏到几十毫伏,且含有大量的噪声和干扰,因此需要经过信号调理电路进行放大、滤波等处理。
信号调理电路主要由放大器、滤波器和基准电源等组成。
放大器采用高精度仪表放大器,能够将传感器输出的微弱信号放大到适合单片机处理的范围。
滤波器采用低通滤波器,用于滤除信号中的高频噪声和干扰。
基准电源为整个电路提供稳定的参考电压,以保证测量精度。
3、单片机单片机是整个系统的控制核心,本设计选用 STM32F103 系列单片机。
STM32F103 系列单片机具有高性能、低功耗、丰富的外设资源等优点,能够满足智能电子秤的设计要求。
智能电子秤的设计随着科技的不断发展,智能电子秤作为一种高科技的配备已越来越普及。
智能电子秤主要分为家用电子秤和商用电子秤。
家用电子秤主要用于家庭生活,商用电子秤主要用于商业领域。
智能电子秤不仅能够快速准确地测量物体的重量,还可以进行可视化的数据分析和储存,具有高效、方便、快捷等特点,因此被广泛应用于物流、商业、医疗、家庭等众多领域。
接下来,本文将从智能电子秤的设计及其优点等方面进行讲述。
一、智能电子秤的设计(一)硬件设计智能电子秤的硬件设计主要包括传感器、芯片、显示屏、控制器等部分。
1. 传感器传感器是智能电子秤的核心部分,能够实现对物体重量的高精度测量。
其原理是在极小的力下,变成电信号,进而经过信号放大、进行数码转换等处理过程,最终显示出来。
2. 芯片芯片是智能电子秤的控制中心,能够对传感器的数据进行处理和传输,完成计算和显示。
同时,芯片还可以用于数据存储和转换。
3. 显示屏显示屏是智能电子秤的主要输出部分,能够实时显示物体的重量以及其他状态信息,如工作状态、电池电量等。
4. 控制器控制器是智能电子秤的指挥中心,能够对传感器、芯片、显示屏等部件进行有序的协调和控制,保障智能电子秤的顺利运作。
(二)软件设计智能电子秤的软件设计主要包括控制程序、界面设计和数据处理等部分。
1. 控制程序控制程序是智能电子秤的核心部分,它能够对硬件部分进行调控和管理,包括传感器、芯片、显示屏和控制器等部分,实现数据采集、传输、处理和显示等一系列操作。
2. 界面设计界面设计是智能电子秤的外观样式,包括屏幕显示方式、按键设置等方面的设计。
通过人性化的设计,可以让消费者更加方便、快捷地使用智能电子秤。
3. 数据处理数据处理是智能电子秤的最终目的,通过对采集到的数据进行处理和分析,可以得到更加准确和有用的数据,从而更好地进行判断和决策。
二、智能电子秤的优点智能电子秤的优点十分明显:1. 精准度高智能电子秤采用高精度传感器,能够快速、准确地测量物体的重量。
电子秤设计报告范文一、简介电子秤是通过电子传感器测量物体质量的一种设备。
随着科技的发展,电子秤取代了传统的机械秤,具有精确、方便、智能等特点。
本次设计旨在研究电子秤的工作原理、设计思路以及实际应用。
二、工作原理电子秤的工作原理主要是利用电子传感器测量物体受力的变化。
当物体放置在电子秤上时,物体的重力作用在电子传感器上产生变化,传感器输出的电信号经过放大、滤波等处理后转化为数字信号,根据这些信号计算出物体的质量,并在显示屏上显示出来。
三、设计思路1.电子传感器选择:我们采用了压力传感器作为电子秤的重要组成部分。
压力传感器能够准确地感知物体施加在其上面的力,是一种较为常见的传感器。
2. 单片机选择:我们选用了Atmega328P单片机作为主控芯片。
Atmega328P具有较强的处理能力和广泛的应用范围,能够满足电子秤的计算和控制需求。
3.显示模块:我们选择了数码管显示模块作为电子秤的显示装置。
数码管显示简单明了,便于用户观察。
4.电源电路:电子秤需要稳定的电源供电。
我们设计了一个直流稳压电源电路,保证电子秤的正常运行。
五、设计步骤1.搭建电子秤平台:设计一个结构稳定的平台,并安装压力传感器在其下方。
2.连接电路:将压力传感器与单片机连接,并接入电源电路和数码管显示模块。
3.编写程序:利用C语言编写单片机的程序,实现电子秤的各项功能,如AD转换、数据处理、结果显示等。
六、实际应用七、结论本次设计成功实现了一个简单的电子秤,通过压力传感器、单片机和数码管的协作,能够准确测量物体的质量。
电子秤的设计思路和步骤简单明了,且应用广泛,有良好的实际应用前景。
简易电子秤的设计一、简易智能电子秤系统结构与原理称重传感器:当被称物体放置在秤盘上时,压力传感器产生力电效应,将物体的压力转换成与被称物体压力成一定函数关系的电信号。
信号处理电路:该电信号先通过前端信号处理电路进行初步处理,以增强信号的稳定性和准确性。
AD转换器:经过信号处理的模拟电信号需要通过AD转换器(如H711芯片)将其转换成数字信号,以便于微控制器进行处理。
H711是一款专为高精度电子秤设计的24位AD转换器芯片,具有集成度高、响应速度快、抗干扰性强等优点。
微控制器(MCU):数字信号送入微控制器后,MCU通过扫描键盘和各种功能开关,根据输入内容和开关状态进行判断、分析和控制,完成各种运算和显示功能。
显示模块:微控制器将计算结果输出到显示模块,如数码管或液晶显示屏,以显示被称物体的重量、价格等信息。
通过以上结构与原理,简易智能电子秤能够实现物体的准确称重,并通过微控制器的处理和控制,提供更多的智能化功能。
二、硬件设计在简易电子秤的设计中,硬件部分是实现秤重功能的基础。
本节将详细介绍电子秤的硬件设计,包括传感器选择、信号处理电路、显示模块和电源管理。
传感器是电子秤的核心部件,负责将物体的重量转换为电信号。
在本设计中,我们选用应变式称重传感器。
这种传感器基于金属电阻应变片的原理,当物体施加压力时,应变片会产生电阻变化,通过惠斯通电桥转换为电压信号输出。
这种传感器具有灵敏度高、稳定性好、抗干扰能力强等特点。
传感器输出的电压信号非常微弱,需要通过信号处理电路进行放大、滤波和线性化处理。
信号处理电路主要包括放大器、滤波器和AD转换器。
放大器:使用运算放大器对传感器信号进行放大,以满足后续电路的处理需求。
显示模块用于直观地显示秤重结果。
本设计采用LCD显示屏,可以清晰地显示数字和字符。
微处理器将处理后的重量数据发送给LCD 显示屏进行显示。
电源管理是确保电子秤稳定运行的关键。
本设计采用内置电池供电,通过电源管理模块进行电压稳定和电池电量监测。
智能电子秤的设计与实现研究智能电子秤已经成为现代家庭生活中不可或缺的工具,它的出现将人们从繁琐的计量过程中解放出来,让我们更加轻松便捷地完成各种测量工作。
在本文中,我们将探讨智能电子秤的设计与实现研究。
一、智能电子秤的构造与原理智能电子秤通常包含四个关键元件:称量传感器、AD转换器、微处理器和显示屏。
称量传感器是整个电子秤的核心部件,在称量过程中通过量化转换将物体重量转化为电信号;AD转换器将模拟信号转化为数字信号,微处理器则通过读取和处理数字信号,最终将结果显示在屏幕上。
智能电子秤的原理主要由两个部分组成:称重部分和数据处理部分。
称重部分通过称量传感器实现物体的重量测量,然后将数据传递给AD转换器进行转换和处理;数据处理部分则由微处理器来完成,通过编程算法处理AD转换器输出的数据,最终将结果以数字形式显示在液晶屏幕上。
二、智能电子秤的设计与实现对于智能电子秤的设计,我们需要考虑以下几个因素:1.精准度:智能电子秤的精度是至关重要的。
为了确保精准度,称量传感器应该具有高精度和高灵敏度,并且在秤体设计过程中应该考虑到不同重量范围的测量能力。
2.便携性:智能电子秤通常需要在各种环境下使用,因此在设计时,需要考虑到便携性和易于携带性。
为此,秤盘和秤体的设计应该具有轻便和易于携带的特点。
3.多功能性:智能电子秤应该具有多种测量功能和单位的选择,这样用户可以方便地选择不同的测量模式,准确地测量各种物体的重量。
基于以上因素,我们可以设计一款智能电子秤的实现方案:1.硬件实现:在硬件方面,我们使用高精度的称量传感器作为电子秤的核心部分,并且在秤盘和秤体的设计上采用轻便、耐用的材料。
同时,在AD转换器和微处理器的选择上,我们应该考虑到高速、高精度和稳定性等因素。
2.软件实现:在软件方面,我们需要设计一个符合测量需求的界面,并实现多种测量模式和单位的选择。
此外,我们需要开发测量算法,以确保测量的准确性和稳定性。
最后,我们需要将算法和数据处理程序嵌入微处理器中,使之与称量传感器进行协同工作。
智能称重电子秤设计一、引言随着科技的不断发展,智能家居日益普及。
智能称重电子秤作为家庭必备的一种电子设备,其设计和功能愈发受到重视。
本文将围绕智能称重电子秤的设计展开讨论。
二、功能需求智能称重电子秤主要用于测量物体的重量。
除了基本的重量测量功能外,现代智能电子秤还可能具备以下功能: - 蓝牙连接:可与手机或其他设备连接,实时显示测量结果; - 智能识别:能够识别和记录不同物体的重量,并进行分类; - 数据分析:可以对测量数据进行分析,如生成曲线图、历史记录等功能; - 多种单位切换:支持不同的重量单位切换,满足不同需求; - 单次和连续测量:支持单次测量和连续多次测量功能。
三、硬件设计1. 传感器智能电子秤的核心部件是传感器,常见的称重传感器有压力传感器、应变片传感器等。
传感器的准确性和稳定性对电子秤的性能影响很大。
2. 控制芯片控制芯片负责处理传感器采集的数据,并控制显示屏显示结果。
一般采用单片机或者其他嵌入式处理器。
3. 显示屏显示屏用于显示测量结果和其他信息,常见的有液晶显示屏、LED显示屏等。
4. 电源管理智能电子秤需要考虑电源管理问题,如电池寿命、低电量提醒等。
四、软件设计软件设计是智能称重电子秤不可忽视的部分,通过软件可以实现各种功能。
### 1. 数据处理算法智能电子秤需要建立合适的数据处理算法,对传感器采集的数据进行处理,确保测量结果的准确性。
2. 用户界面设计用户界面设计直接关系到用户体验,设计简洁易懂的界面是提升产品竞争力的重要因素。
3. 蓝牙连接实现与手机等设备的蓝牙连接功能需要编写相应的蓝牙通信协议。
五、总结智能称重电子秤作为一种智能家居产品,具有极大的市场潜力。
设计一款功能强大、性能稳定的智能电子秤,不仅需要考虑硬件设计的合理性,还需要注重软件设计的人性化。
希望本文对智能称重电子秤的设计有所启发,促进该领域的发展。
一种新型智能电子秤的设计杨纪明 吴军辉西安交通大学 西安:710049 摘 要 本文给出了一种新型智能电子秤的设计方案。
该系统以单片机作为中心控制单元,采用V F型模数转换、锁相倍频、非线性校正和数字滤波等技术。
关键词 电子秤 单片机 非线性校正 数字滤波Abstract T h is p ap er p resen ts a new design fo r the in telligen t electron ic scale.T he m icro2 con tro ller w as u sed as the cen tral con tro l un it in the system,the techn iques of V F conversi on, PPL m u lti p lex frequency,non-linear co rrecti on and digital filter w ere em p loyed.Keywords E lectron ic scale M icrocon tro ller N on linear co rrecti on D igital filter1 引言 随着科技的进步,对电子秤的要求也越来越高。
影响其精度的因素主要有:机械结构、传感器和数显仪表。
在机械结构方面,因材料结构强度和刚度的限制,会使力的传递出现误差,而传感器输出特性存在非线性,加上信号放大、模数转换等环节存在的非线性,使得整个系统的非线性误差变得不容忽视,因此,在高精度的称重场合,迫切需要电子秤能在线自动校正系统的非线性。
此外,为了保证准确、稳定地显示,仪器内部分辨率(主要是ADC的分辨率)一般要比外部显示分辨率高4倍以上,这就要求所采用的ADC具有足够的转换位数,而采用高精度的ADC,自然增加了系统的成本。
基于电子秤的现状,本文提出了一种用单片机控制的高精度智能电子秤设计方案。
通过实时地对系统的非线性进行补偿,使测量精度得到了大大提高,由于采用数字滤波技术,使稳态测量的稳定性和动态测量的跟随性都相当好,根据该方案设计的电子秤已成功地用于航空发动机推力(范围为0~150kN)的测试,并取得了令人满意的效果。
2 硬件结构及工作原理 硬件结构如图2-1所示,称重传感器输出信号(0~200mV)经放大和模数转换后,由单片机进行数据采集,然后通过软件完成非线性校正、数字滤波和归一运算等处理,最后将测量结果送L ED显示器显示。
整个测量系统以单片机A T89C51为中心控制单元,A T89C51内含完整的多通道定时器 计数器和响应迅速的中断系统,并且具有4K字节的电可擦写程序存储器和接口方便的I O口。
设计提出的高分辨率V F型模数转换和非线性校正都是在单片机控制下完成的。
211 V F型模数转换在本系统中,采用集成芯片V FC320实现模数转换,V F320为精密电压 频率转换器,当选择10kH z满度输出时(输入电压范围:0~10V),线性度可达01005%。
由于是频率输出,运用锁相倍频电路来提高分辨率,在设计中,倍频系数取20,因此锁相环电路输出的频率范围是0~200kH z。
频率的测量由单片机的内部计数器T0完成,其计数闸门时间为0125S,闸门脉冲由时基电路产生,并通过外中断I N T0对计数器实施控制。
T0为16位计数器,计数范围是0~65535,对于满度为200kH z的频率输入,在闸门时间内的计数值为50000,根据T0的计数值,经线性校正、数字滤波、归一运算后,便可得到测量结果。
对于单片机A T89C51,当时钟振荡频率为12M H z时,T0的最大输入频率为500kH z。
如果在给定的闸门时间内计数脉冲数超过65535,可利用・45・工业仪表与自动化装置 1999年第1期计数器T 0的计数值和溢出(中断)次数来测量输入的频率,因此,此V F 型ADC 可以达到很高的分辨率。
图2-1 电子秤硬件结构图212 系统的非线性校正及实现测量系统各环节(机械结构、传感器、数显仪表)所造成的综合误差,最终反映在作用于传感器的实际被测量与仪器的显示值之间的差别上,我们将这种差别归结为整个系统的非线性误差。
系统的非线性,可通过对系统的校准来获取。
设校准时施加给传感器的(标准)作用力为S (i ),对应的仪器测量显示结果为M (i )(i 为不同的校准点),根据数组S (i )和M (i ),通过数值拟合,可以得到二者之间的关系式,即校正函数:S =f (M )由于系统的误差是系统各环节共同作用的结果,产生误差的原因比较复杂,校正函数很可能有多个拐点,为保证校正函数的拟合精度,采用分段最小二乘抛物线拟合法。
分段的原则是:每个段内的曲线只允许有一个拐点,同时记录各段两端的测量值M j m in 和M j m ax (j 为分段号)。
然后求出各段的最小二乘拟合多项式:S j =C j 0+C j 1M +C j 2M2(2-1)为了保证拟合精度,拟合多项式的系数用3字节浮点数表示。
仪器工作时,根据测量值M 的大小,自动地取出对应的拟合系数,由式(2-1)计算出校正后的测量结果。
213 数据显示电路显示电路采用单片串行输入L ED 驱动器M A X 7219,该器件与单片机接口简单,仅需3根I O 线,而且编程容易,显示方式灵活,其输入数据既可采用BCD 码方式,又可采用非编码的7段数码方式。
M A X 7219的应用大大简化了硬件电路。
3 软件设计 系统软件包括主程序和中断子程序。
主程序的功能是完成系统初始化,包括设置堆栈指针、分配内存空间、设置中断控制字以及设定计数器 定时器的工作方式等,主程序结构如图3-1所示。
为了使各环节硬件电路的输出在测量前达到稳定阶段,从而确保所测得的空载(零点)T 0计数值的正确性,仪器上电时设置了5秒软件延时,在这段时间里,同时进行系统的自检。
中断子程序包括I N T 0和I N T 1服务程序。
数据的采集、非线性拟合、数字滤波及显示控制都由・55・1999年第1期 工业仪表与自动化装置I N T 0中断程序完成;I N T 1中断服务程序的功能是键盘管理,包括响应键盘输入、键值分析和键功能的处理等。
图3-1 主程序流程图 下面重点介绍I N T 0中断服务程序的结构原理,其程序流程图如图3-2所示。
此中断每0125秒产生一次,程序进入中断后,首先是读出计数器T 0的内容,紧接着进行数字滤波处理,然后完成非线性校正、归一运算及数据的显示。
为了增加稳态测量显示的稳定性,同时又能快速地跟踪施加于传感器的作用力的变化,软件采用了改进的滑动平均值滤波方法。
所谓滑动平均值滤波,是在单片机内RAM 中开辟一个数据暂存区,待滤波的数据以环形队列结构的方式存入该数据区,即每新采集一个数据便存入暂存区,同时去掉一个最早存入的数据,然后对数据区的数据进行平均运算。
由于队列中始终保持着最近的数据,因而计算结果也反映了待测参数的最新值。
改进的滑动平均值滤波,不是每次测量都作平均处理,是否作平均运算取决于本次计数值与上次平均值的差值 M -M 。
若差值小于门限值T (T 的大小根据测量范围和测量的随机误差的大小来综合确定),说明当前处于稳定测量状态,为了稳定、准确的测量和显示测量结果,进行滑动平均值滤波;若差值大于T ,则认为处于动态或过滤态测量状态,为了实时跟踪输入的变化,不作平均值处理,直接以本次计数值来计算测量结果,并用该值刷新滤波队列的所有单元。
与滑动平均值滤波相比,改进的滑动平均值滤波在保证了稳态测量精度的同时,大大增加了过滤态测量的跟随性。
图3-2 TN T 0中断程序流程图 数字滤波处理结束后,软件根据平均值M 的大小选择相应的校正系数,计算校正后的测量值。
为了保证运算精度,拟合多项式采用浮点运算。
在称重测量系统中,往往有一个机械预紧力作用于传感器,因此,空载时传感器有一个“零点”电压输出。
在实际测量时,要扣除此“零点”值。
此外,为了使测量显示值与实际值相同,需进行归一运算。
(下转第46页)平衡容器的安装高度L应与仪表的最大量程一致。
即∃P m ax=lr e′+(L-l)r3′-L r e″代入式(4-1),即得平衡容器的安装高度。
L=∃P m ax-H0(l-∃r″1∃r′1)(r′e-r′3)∃r″1∃r′1(r′e-r′3)+(r′3-r′e)当水位偏离H0时,平衡容器产生的差压∃1:∃P=∃P0 (r′1-r″1)∃H(4-5)∃P0——水位为H0时差压值∃H——水位偏离H0之值从以上的分析中可知,不管用何种平衡容器测量汽包液位,只要汽包的工况偏离额定工况都起不到很好的补偿作用。
随着计算机和智能仪表的使用,只有动态补偿才能使汽包水位与压差一一对应。
5 平衡容器的安装511 标高的确定 如果仪表显示以刻度盘中心作为水位零点则:单室平衡容器:安装水位线(取压孔内径的下缘线)与汽包的正常水位线+仪表正向最大刻度值。
双室平衡容器:安装水位线(正、负取压孔间的平分线)与汽包的正常水位线一致。
蒸汽补偿式平衡器:安装水位线(正压恒位水槽的最高点)比负压侧高出L值。
如果仪表显示刻度盘以零点作为水位零点则:单室平衡容器:安装水位线比汽包零水位线高出仪表的整个刻度值。
双室平衡容器:安装水位线比汽包零水位线高出仪表刻度值的1 2。
512 平衡容器与汽包之间的连接管应尽可能短,且不得有影响介质正常流通的元件,连接管上的一次阀门应水平安装。
513 蒸汽罩补偿式平衡容器的排水管,应单独引至锅炉下降管,该下水管不得与其它下降管共用,且不要保温。
在平衡容器和下降管两侧应设有一次阀门,在接至下降水管前的前段须加膨胀弯。
正负压引出管,应在水平引出超过1米后,再向下敷设,保证两管的温度梯度一致。
514 平衡容器必须垂直安装,为使平衡容器内蒸汽凝结加快,其上部一般不要保温。
515 差压计算实例:设汽包压力为P=7184M Pa,饱和温度为294147℃。
r′1=725kg m3,r″1=4116kg m3,r3=991kg m3 L=627mm l=245mm H0=320mm代入式(4-1)得∃P0=(245×725+(627-245)×991-(320×725+(627-320)×4116)×918×10-6=31052kPa 说明汽包在“零水位线”时,差压∃10= 31052kPa根据式(4-5) ∃P=∃P0 ∃H(r′1-r″1)则:∃P=∃P0 ∃H(725-4116)×918×10-6=∃P0 ∃H×0100669如果水位校验范围为∃H=±320mm则相应压差:当高水位时:H h=+320mm ∃P h=31052-320×010069=019112kPa当低水位时:H1=-320mm ∃P1=31052+ 320×010069=511928kPa可见当汽包水位变化640mm时,差压变化为511928-019112=4128kPa,当校验差压变送器时,它的量程应是汽包水位变化的(r′1-r″1)倍。