三轴(XYZ)MEMS陀螺仪
- 格式:docx
- 大小:71.36 KB
- 文档页数:1
三轴陀螺仪是如何工作的Iphone 4手机采用了意法半导体的MEMS(微电机系统)陀螺仪芯片,芯片内部包含有一块微型磁性体,可以在手机进行旋转运动时产生的科里奥力作用下向X,Y,Z三个方向发生位移,利用这个原理便可以测出手机的运动方向。
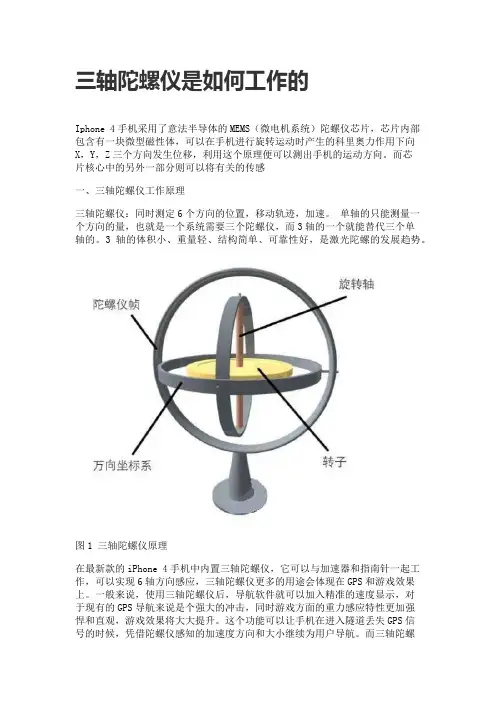
而芯片核心中的另外一部分则可以将有关的传感一、三轴陀螺仪工作原理三轴陀螺仪:同时测定6个方向的位置,移动轨迹,加速。
单轴的只能测量一个方向的量,也就是一个系统需要三个陀螺仪,而3轴的一个就能替代三个单轴的。
3轴的体积小、重量轻、结构简单、可靠性好,是激光陀螺的发展趋势。
图1 三轴陀螺仪原理在最新款的iPhone 4手机中内置三轴陀螺仪,它可以与加速器和指南针一起工作,可以实现6轴方向感应,三轴陀螺仪更多的用途会体现在GPS和游戏效果上。
一般来说,使用三轴陀螺仪后,导航软件就可以加入精准的速度显示,对于现有的GPS导航来说是个强大的冲击,同时游戏方面的重力感应特性更加强悍和直观,游戏效果将大大提升。
这个功能可以让手机在进入隧道丢失GPS信号的时候,凭借陀螺仪感知的加速度方向和大小继续为用户导航。
而三轴陀螺仪将会与iPhone原有的距离感应器、光线感应器、方向感应器结合起来让iPhone 4的人机交互功能达到了一个新的高度。
二、三轴陀螺仪的应用在工程上,陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。
传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。
自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。
1976年美国Utah大学的Vali和Shorthill提出了现代光纤陀螺仪的基本设想,到八十年代以后,现代光纤陀螺仪就得到了非常迅速的发展,与此同时激光谐振陀螺仪也有了很大的发展。

InvenSense Inc.(应美盛)I.公司介绍InvenSense为智能型运动处理方案的先驱、全球业界的领导厂商,驱动了运动感测人机接口在消费性电子产品上的应用。
本公司提供的集成电路(IC)整合了运动传感器-陀螺仪以及相对应的软件,有别于其他厂商,有着小尺寸、高整合、高性能、高可靠度与低价格的优势。
本公司产品可应用于众多市场上,目前我们所设定的目标市场为消费性电子产品市场,如视讯游戏游戏杆与可携式游戏机、手机、平板计算机、数字相机与摄影机、数字电视和机顶盒的摇控器、3D鼠标,以及行人导航器。
本公司拥有四种专有技术优势:专利的Nasiri-Fabrication制程,先进的MEMS陀螺仪设计,可提供传感器讯号处理方案(signal processing)及运作本司运动处理平台(Motion Processing)关键之融合算法技术(Sensor Fusion)的混合讯号电路系统(mixed-signal circuitry),以及本公司的运动处理数据库与运动感测应用(Motion Application)软件方案。
因本公司可组装、可扩展的平台架构,从一轴的模拟陀螺仪,到完整整合之三轴与六轴的数字运动处理方案为止,本公司能提供市场多种整合性运动感测产品。
InvenSense于2003年成立,总公司在Sunnyvale, California,测试厂位于台湾,并在台湾、韩国、日本、迪拜设有业务处及应用支持服务处。
The Leader in Consumer Motion Processing SolutionsII. MEMS 陀螺仪技术InvenSense为开创下世代消费性电子产品(CE)市场之MEMS运动处理技术的领导商。
如今,许多CE产品已开始采用以三轴加速器(3-axis MEMS accelerometers)为主之运动感测产品。
这些运动传感器的功能有限,仅能用来感测最基本的动作,如在Apple iPhone用来侦测手机拿法以决定图片的直立或横式,或在Nintendo Wii移动遥控器来控制游戏功能。
三轴(X/Y/Z)MEMS陀螺仪概述InvenSense的三轴陀螺仪为全球首例单芯片、以数字输出的三轴MEMS产品,专门为消费性应用产品设计。
本公司三轴产品的特征包含,可将陀螺仪的输出数字化的三个16-bit模拟数字转换器(ADC)、高达±2000°/秒(dps)的全格感测范围(full-scale range)、可程序化的低通滤波器、I2C或SPI序列界面(serial interface)、低电压操作(2.1V到3.6V),以及4x4x0.9mm的QFN包装。
此系列产品包含ITG-3050与MPU-3050。
本公司三轴产品会将过滤后的陀螺仪数据传达至序列通信总线(serial communications bus)。
ITG-3050仅支援输出原始三轴陀螺仪数据。
ITG-3050有第二个I2C主要感测总线(master sensor bus),提供可直接升级至MPU系列产品的路径,使其能与InvenSense的软件解决方案结合。
MPU产品特征有内建之数字运动感测处理(DMP:Digital Motion Processor)硬件加速引擎、最低512 byte的FIFO,以及含可连接至其他厂牌数字加速器的第二个I2C主要感测总线(sensor bus),感测线性与旋转动作,提供完整的六轴融合演算数据。
内建的FIFO与感测总线(sensor bus),可缩短系统运算时间,降低系统耗电量。
当FIFO使系统微处理器实时读取感测数据并进入休眠状态的同时,专用感测总线,让产品不须另外连接处理器,就可直接从外接的加速器取得数据,使MPU读取更多资料。
因应现今多功能手机,三轴的MPU-3050可为如游戏与在地服务等常见的应用,提供精确的1:1真实动作追踪功能。
另外,32-bit的DMP引擎,支持进阶人机界面(UI:User Interface)功能,启动如空中签字(AirSign)的签名验证、随意触控(TouchAnywhere)的应用与导航控制、动作指令(MotionCommand)的手势快捷方式等,利用手势或使用文字辨识等的应用。

mems陀螺仪指标陀螺仪是一种用于测量和报告物体的角速度的仪器,它在现代科技中扮演着重要的角色。
在大多数情况下,它被用于航空航天、导航和航海领域,但近年来也在智能手机、游戏控制器和运动跟踪设备等消费级产品中得到了广泛的应用。
本文将介绍陀螺仪的基本原理、其在不同领域中的应用以及与之相关的一些重要指标。
陀螺仪的基本原理是基于角动量守恒定律。
当物体绕着一个轴旋转时,它的角动量保持不变。
陀螺仪利用这个原理来测量旋转的角速度。
一般来说,陀螺仪有三个轴(x、y、z轴),分别对应着物体绕着这些轴旋转的角速度。
陀螺仪的工作原理可以通过陀螺效应来解释。
陀螺效应是指当旋转体的自转速度发生变化时,它会产生一个与转轴垂直的力矩。
这种力矩会使旋转体发生偏转,从而产生一个与原始转轴垂直的新转轴。
利用这个原理,陀螺仪可以测量物体的角速度。
陀螺仪的应用领域非常广泛。
在航空航天领域,陀螺仪被用于飞行器的导航和姿态控制。
它可以测量飞行器的角速度,从而帮助飞行员或自动驾驶系统控制飞行器的姿态。
在导航领域,陀螺仪也被用于惯性导航系统,可以测量车辆或船只的角速度,从而帮助确定它们的位置和方向。
此外,在消费级产品中,陀螺仪也发挥着重要的作用。
例如,在智能手机中,陀螺仪可以用于屏幕自动旋转和游戏控制。
它可以检测手机的旋转角度和速度,从而根据用户的操作来调整屏幕的方向或实现游戏的交互效果。
在运动跟踪设备中,陀螺仪可以用于测量人体的运动姿态,从而帮助健身爱好者或专业运动员进行训练和分析。
与陀螺仪相关的一些重要指标包括精度、灵敏度和响应时间。
精度是指陀螺仪测量结果与实际角速度之间的偏差,通常用度/秒表示。
较高的精度意味着陀螺仪测量结果更准确。
灵敏度则是指陀螺仪对角速度变化的敏感程度,通常以度/秒为单位。
较高的灵敏度意味着陀螺仪可以更好地检测细微的角速度变化。
响应时间是指陀螺仪从检测到角速度变化到输出结果的时间延迟。
较低的响应时间意味着陀螺仪可以更快地响应并输出测量结果。
MEMS陀螺仪的简要介绍MEMS陀螺仪(Micro-Electro-Mechanical System gyroscope)是一种基于微机电系统技术的陀螺仪,具有小尺寸、低功耗、高灵敏度等特点。
它广泛应用于无人机、手机、平衡车等设备中,用于测量角速度和方向。
首先,我们来看一下MEMS陀螺仪的性能参数。
主要包括灵敏度、测量范围、精确度和稳定性。
1.灵敏度:指陀螺仪对角速度变化的感知程度,通常以每秒多少度/秒来表示。
灵敏度越高,陀螺仪对角速度变化的检测越精准。
2.测量范围:指陀螺仪能够测量的角速度的最大值和最小值。
通常以度/秒为单位,在不同应用场景下需根据需求选择合适的测量范围。
3.精确度:指陀螺仪测量结果与真实值之间的偏差。
精确度越高,陀螺仪的测量结果越接近真实值。
4.稳定性:指陀螺仪在长时间使用过程中保持测量精度的能力。
稳定性包括零漂、温漂等参数,可通过校准等方法来提高。
1.姿态控制:MEMS陀螺仪被广泛应用于飞行器、导航设备等需要进行姿态控制的设备中。
通过测量角速度变化,可以帮助设备实时检测自身的姿态,从而进行调整和控制。
2.稳定平台:MEMS陀螺仪可以用于制作稳定平台,如相机防抖系统。
通过补偿相机的晃动,可以提高拍摄的稳定性和图像质量。
3.导航定位:MEMS陀螺仪可以与其他传感器(如加速度计、磁力计)结合使用,用于导航和定位应用。
通过测量角速度和加速度,可以估计设备的位置和方向。
4.虚拟现实和增强现实:MEMS陀螺仪可以用于虚拟现实和增强现实设备中,如头戴式显示器和手持设备。
通过检测用户头部的旋转动作,可以实现对虚拟场景的观察和交互。
5.运动追踪:MEMS陀螺仪可以用于运动追踪设备中,如运动手柄和运动传感器。
通过测量角速度和加速度,可以捕捉用户的运动,实现与设备的交互。
综上所述,MEMS陀螺仪是一种小尺寸、低功耗、高灵敏度的陀螺仪,广泛应用于姿态控制、稳定平台、导航定位、虚拟现实和运动追踪等领域。
mems三轴加速度计注意事项使用MEMS(Micro-Electro-Mechanical Systems)三轴加速度计时,有一些注意事项需要考虑。
以下是一些重要的方面:1. 安装方向,MEMS三轴加速度计具有三个轴,通常标记为X、Y和Z。
在安装时,确保正确地确定每个轴的方向,并将其与所测量的物理量相对应。
这样可以确保获得准确的测量结果。
2. 校准,在使用之前,对MEMS三轴加速度计进行校准是非常重要的。
校准可以消除传感器本身的误差,并提高测量的准确性。
校准过程通常包括检查和调整零偏、灵敏度和非线性等参数。
3. 防震措施,MEMS三轴加速度计对振动和冲击非常敏感。
在安装时,应尽量避免将其暴露在高频或大幅度的振动环境中。
可以采取一些防护措施,如使用减震材料或安装在稳定的结构上,以减少外界干扰。
4. 温度影响,温度变化可能会影响MEMS三轴加速度计的性能。
在实际应用中,尽量控制环境温度的稳定性,或者在测量结果中进行温度补偿,以消除温度对测量的影响。
5. 电源和信号干扰,电源噪声和信号干扰可能会影响MEMS三轴加速度计的测量结果。
为了减少这些干扰,可以使用滤波器、屏蔽和隔离等技术来提高系统的抗干扰能力。
6. 采样率和带宽,选择适当的采样率和带宽是确保测量准确性的关键。
采样率应足够高,以捕捉到所需的动态范围和频率内容。
带宽应根据应用需求进行选择,以避免不必要的噪声和干扰。
7. 数据处理和解析,MEMS三轴加速度计的输出通常是原始加速度信号。
为了得到有用的信息,需要对原始数据进行处理和解析。
这可能涉及到滤波、积分、坐标转换等算法和技术。
总之,使用MEMS三轴加速度计时,需要注意安装方向、进行校准、防震措施、温度影响、电源和信号干扰、采样率和带宽的选择,以及数据处理和解析等方面。
这些注意事项将有助于确保获得准确可靠的加速度测量结果。

MEMS陀螺仪姿态算法⼊门测试传感器:MPU9250,九轴传感器,其中有三个轴就是陀螺仪的三个⽅向⾓速度。
陀螺仪在每个采样点获得:采样时刻(单位微妙),XYZ三个⽅向的⾓速度(单位弧度/秒),记为:wx, wy, wz。
陀螺仪静⽌时,wx, wy, wz也是有读数的,这就是陀螺仪的零漂。
实验⼀:将陀螺仪绕X轴旋转时,只有wx有读数;将陀螺仪绕Y轴旋转时,只有wy有读数;将陀螺仪绕Z轴旋转时,只有wz有读数;实验⼆:将陀螺仪绕XY⾯上的轴旋转,wz读数为零,即与旋转轴垂直的轴上的⾓速度为零。
因为陀螺仪采样率很⾼(1000Hz),通过瞬时读数计算姿态,可以看做:先绕X轴旋转,再绕Y轴旋转,再绕Z轴旋转。
下⾯这段代码实现了⼀个简单的陀螺仪姿态算法,开机并静置⼏⼗秒后,拿着陀螺仪旋转,⼗⼏分钟内姿态是正确的,之后由于积分累积,误差就越来越⼤了。
// 参数说明:// sampleTS : 采样时刻,单位:微秒// wx, wy, wz :陀螺仪采样,单位:弧度/秒void GyroExperiment(uint64_t sampleTS, float wx, float wy, float wz){// 传感器启动时刻static uint64_t s_lasttime = 0;static uint64_t s_lastlog = 0;if(s_lasttime == 0){s_lasttime = sampleTS;s_lastlog = sampleTS;return;}// 采⽤启动后5秒-35秒的采⽤平均值作为陀螺仪零漂// 在此期间,应保持陀螺仪静⽌static float s_wx = 0, s_wy = 0, s_wz = 0; // 陀螺仪零漂static uint64_t s_elapsed = 0;if(s_elapsed < 35000000){static int s_SampleCnt = 0;if(s_elapsed > 5000000){s_wx += (wx - s_wx) / (s_SampleCnt + 1);s_wy += (wy - s_wy) / (s_SampleCnt + 1);s_wz += (wz - s_wz) / (s_SampleCnt + 1);s_SampleCnt++;}s_elapsed += (sampleTS - s_lasttime);s_lasttime = sampleTS;}// 初始姿态,采⽤三个轴向量表⽰static float Xx=1,Xy=0,Xz=0; // X轴static float Yx=0,Yy=1,Yz=0; // Y轴static float Zx=0,Zy=0,Zz=1; // Z轴// 根据陀螺仪读数计算三个轴的旋转量float interval = (sampleTS - s_lasttime) / 1e6;float rx = (wx - s_wx) * interval;float ry = (wy - s_wy) * interval;float rz = (wz - s_wz) * interval;// 分别构造绕三个轴旋转的四元数float cos,sin;cos = cosf(rx/2); sin = sinf(rx/2); Quaternion qx(cos, Xx * sin, Xy * sin, Xz * sin);cos = cosf(ry/2); sin = sinf(ry/2); Quaternion qy(cos, Yx * sin, Yy * sin, Yz * sin);cos = cosf(rz/2); sin = sinf(rz/2); Quaternion qz(cos, Zx * sin, Zy * sin, Zz * sin);// 依次旋转三个轴向量Quaternion q = qx*qz*qy; q.normalize(); Quaternion qi = q.inverse();Quaternion QX(0, Xx, Xy, Xz); QX = q*QX*qi; QX.normalize(); Xx = QX.q2; Xy = QX.q3; Xz = QX.q4; // 旋转X轴;Quaternion QY(0, Yx, Yy, Yz); QY = q*QY*qi; QY.normalize(); Yx = QY.q2; Yy = QY.q3; Yz = QY.q4; // 旋转Y轴;Quaternion QZ(0, Zx, Zy, Zz); QZ = q*QZ*qi; QZ.normalize(); Zx = QZ.q2; Zy = QZ.q3; Zz = QZ.q4; // 旋转Z轴;// 每1秒输出⼀次姿态数据s_lasttime = sampleTS;if(sampleTS - s_lastlog > 1000000){console->printf("attitude: [%f, %f, %f]; [%f, %f, %f]; [%f, %f, %f]\n", Xx, Xy, Xz, Yx, Yy, Yz, Zx, Zy, Zz);s_lastlog = sampleTS;}}。
三轴陀螺仪工作原理
三轴陀螺仪是一种用于测量物体在空间中角速度的传感器。
它由三个互相垂直的陀螺仪组成,分别测量绕x轴、y轴和z轴
旋转的角速度。
三轴陀螺仪的工作原理使用了角动量守恒定律和陀螺效应。
在理解三轴陀螺仪的工作原理之前,首先要了解角动量守恒定律。
根据物理学基本原理,当一个物体受到外力或力矩作用时,它的角动量将发生变化。
而当物体不受外力或力矩作用时,它的角动量将保持不变。
在三轴陀螺仪中,每一个陀螺仪都含有一个陀螺转子,转子将保持在旋转状态。
当陀螺仪受到外力或力矩作用时,转子的旋转轴会发生变化。
这就引入了陀螺效应的作用。
陀螺效应是指当一个旋转体受到外力或力矩作用时,它会表现出与作用力垂直的转动。
具体到三轴陀螺仪,当外力或力矩作用于陀螺仪时,它会使陀螺仪整体绕着旋转轴旋转,或者称之为陀螺仪进入自由进动状态。
利用陀螺效应和角动量守恒定律,三轴陀螺仪可以测量物体的角速度。
当物体发生旋转时,陀螺仪会感知到旋转轴发生的变化,并产生相应的信号输出。
通过检测和分析这些信号,我们可以确定物体的角速度和旋转方向。
具体来说,三轴陀螺仪中的三个陀螺仪分别测量绕x轴、y轴
和z轴的角速度。
当物体绕任意轴旋转时,陀螺仪会感知到旋
转轴的变化,并将这一变化转化为电信号输出。
这些电信号被传递到计算设备,经过处理和分析后,我们可以得到物体的角速度信息。
总结起来,三轴陀螺仪利用角动量守恒定律和陀螺效应来测量物体在空间中的角速度。
通过感知旋转轴的变化并将其转化为电信号输出,我们可以确定物体的角速度和旋转方向。
三轴MEMS陀螺仪工作原理三轴MEMS陀螺仪结合三轴MEMS加速度计实现的所谓六轴产品。
三轴陀螺仪可以同时测定6个方向的位置、移动轨迹和加速度。
从MEMS陀螺仪的应用方向来看,陀螺仪能够测量沿一个轴或几个轴运动的角速度,可与MEMS加速度计(加速计)形成优势互补,如果组合使用加速度计和陀螺仪这两种传感器,设计者就能更好地跟踪并捕捉三维空间的完整运动,为最终用户提供现场感更强的用户使用体验、精确的导航系统以及其它功能。
此外,为让设计和制作的陀螺仪具有较高的加速度和较低的机械噪声,或为校正加速度计的旋转误差,一些厂商会使用磁力计来完成传统上用陀螺仪实现的传感功能,以完成相应定位,让陀螺仪术业有专攻。
这表明,混合的陀螺仪、加速度计或磁感应计结合的方案正成为MEMS陀螺仪技术应用的趋势。
扩展资料:MEMS陀螺仪工作原理要想将陀螺仪技术应用于手机、MID、手柄、鼠标、数码相机这样的小型设备中,将传统陀螺仪小型化是必然,为此,MEMS陀螺仪正全面走进数码设备、游戏设备。
MEMS是什么呢?MEMS(Micro Electro Mechanical systems,微电子机械系统)是建立在微米/纳米技术基础上的前沿技术,其是一种可对微米/纳米材料进行设计、加工、制造、测量和控制的技术。
它可将机械构件、光学系统、驱动部件、电控系统集成为一整体单元的微型系统。
MEMS产品已被广泛地应用于。
数码相机(防抖防震器件,使用MEMS陀螺仪产品即便在持续震动的环境中,也能准确地进行归零的动作)、笔记本电脑或MID、手机(如加速度计)、MP3/MP4、游戏机等消费电子产品中。
陀螺仪利用这种技术,可在硅片上形成微米尺度的精密谐振结构,用来感应角速度的大小和方向。
与传统的利用角动量守恒原理的陀螺仪相比,MEMS陀螺仪使用了不同的工作原理。
传统的陀螺仪是一个不停转动的物体,其转轴的指向不随承载它的支架旋转而变化。
要把这样一个不停转动的没有支撑的能旋转的物体用微机械技术在硅片衬底上加工出来,显然难上加难。
三轴陀螺仪原理
陀螺仪是一种用于测量和检测物体姿态变化的设备。
三轴陀螺仪是指通过三个轴向上的测量来确定物体的旋转角度,分别是
X轴、Y轴和Z轴。
三轴陀螺仪基于角动量守恒定律的原理工作。
根据该原理,当一个物体受到外力作用时,它会发生旋转。
这种旋转会导致物体围绕其自身的转动轴发生改变。
陀螺仪通过测量物体绕三个轴的角速度来确定其旋转角度的变化。
三轴陀螺仪通常由一个旋转质量和一个敏感器组成。
旋转质量是陀螺仪的核心部件,它以高速旋转的方式围绕陀螺仪的轴旋转。
当物体发生旋转时,旋转质量会受到旋转力矩的作用,产生角动量。
敏感器用于测量旋转质量围绕三个轴的角速度。
三轴陀螺仪的工作原理可以通过以下步骤进行解释:
1. 当物体发生旋转时,旋转质量受到旋转力矩作用产生角动量。
2. 陀螺仪的敏感器测量旋转质量围绕X轴、Y轴和Z轴的角
速度。
3. 角速度测量值被发送到陀螺仪的处理单元进行处理。
4. 处理单元通过比较不同轴上的角速度来确定物体的旋转角度。
通过比较X轴和Y轴上的角速度,可以确定物体绕Z轴的旋
转角度。
5. 通过迭代计算和修正,处理单元可以确定物体相对于初始姿态的旋转角度变化。
三轴陀螺仪广泛应用于航空航天、导航系统、无人机等需要精确测量物体姿态变化的领域。
它的工作原理基于角动量守恒定律,通过测量旋转质量围绕三个轴的角速度来确定物体的旋转角度。
MEMS陀螺仪技术原理_三轴陀螺仪技术原理MEMS是什么呢?MEMS(Micro Electro Mechanical systems,微电子机械系统)是建立在微米/纳米技术基础上的前沿技术,其是一种可对微米/纳米材料进行设计、加工、制造、测量和控制的技术。
它可将机械构件、光学系统、驱动部件、电控系统集成为一整体单元的微型系统。
与传统的利用角动量守恒原理的陀螺仪相比,MEMS陀螺仪使用了不同的工作原理。
传统的陀螺仪是一个不停转动的物体,其转轴的指向不随承载它的支架旋转而变化。
要把这样一个不停转动的没有支撑的能旋转的物体用微机械技术在硅片衬底上加工出来,显然难上加难。
为此,MEMS陀螺仪在基于传统陀螺仪特性的基础上利用科里奥利力来实现了设备的小型化。
科里奥利力(Coriolis force)也就时常说的哥里奥利力、科氏力,它是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述,其来自于物体运动所具有的惯性,由于地球自转运动而作用于地球上运动质点的偏向力就是这样的代表,地转偏向力有助于解释一些地理现象,如河道的一边往往比另一边冲刷得更厉害。
MEMS陀螺仪是科里奥利力的最常见应用,MEMS陀螺仪利用科里奥利力(旋转物体在径向运动时所受到的切向力),旋转中的陀螺仪可对各种形式的直线运动产生反映,通过记录陀螺仪部件受到的科里奥利力可以进行运动的测量与控制。
为了产生这种力,MEMS 陀螺仪通常安装有两个方向的可移动电容板,径向的电容板加震荡电压迫使物体作径向运动,横向的电容板测量由于横向科里奥利运动带来的电容变化。
这样,MEMS陀螺仪内的陀螺物体在驱动下就会不停地来回做径向运动或震荡,从而模拟出科里奥利力不停地在横向来回变化的运动,并可在横向作与驱动力差90的微小震荡。
这种科里奥利力好比角速度,所以由电容的变化便可以计算出MEMS陀螺仪的角速度。
三轴角速度与旋转速率成正比以意法半导体的MEMS陀螺仪为例,其核心元件是一个微加工机械单元,在设计上按照。
那么什么是三轴陀螺仪呢?简单的说来就是3D版的重力感应,iPhone 4现在除了可以感应手机左右的晃动以外还能感受到前后的倾斜,这对于未来游戏或者软件的设计来说又提出了新的概念,我们希望在未来能够看见更多的基于陀螺仪的应用。
mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。
MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。
陀螺仪:最后,iPhone 4首次加入了新感应器三轴陀螺仪,保留了方向感应器、距离感应器和光线感应器,可以被更多的应用程序应用。
基于MEMS的加速传感器、陀螺仪、指南针、压力传感器、麦克风正在成为Android 新版本中的指定标配ST推出一款业界独创、采用一个感应结构检测三条正交轴向运动的3轴数字陀螺仪L3G4200D。
这种创新的设计概念大幅提升运动控制式消费电子应用的控制精度和可靠性,为设备的用户界面实现前所未有的现场感。
现有的3轴陀螺仪解决方案依赖两个或三个独立的感应结构,顶多是在同一硅基片上;而意法半导体的陀螺仪则是三轴共用一个感应结构,这一突破性概念可以消除轴与轴之间的信号干扰,避免输出信号受到干扰信号的影响。
此外,这个创新的产品架构使意法半导体的工程师将传感器与ASIC接口整合在一个4x4x1mm 的超小封装内,解决现在和未来的消费电子应用的空间限制问题。
意法半导体的3轴数字陀螺仪让用户可以设定全部量程,量程范围从±250 dps 到±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。
这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。
就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
内置数字输出的L3G4200D 3轴MEMS陀螺仪的设计和制造采用意法半导体销售量超过6亿支的运动传感器的制程技术。
mems陀螺仪原理
MEMS陀螺仪原理是一种传感技术,它通过测量外界恒定的重力加
速度来检测改变的方向。
MEMS陀螺仪的工作原理是:它利用硅芯片上
的微机电系统即MEMS结构来测量恒定的重力加速度,并在转轴上检测
转动惯性。
当受到重力加速度影响时,芯片上的结构会产生位移。
通
过对这种位移的测量,探测出物体的姿态。
具体而言,MEMS陀螺仪是一种微小的传感器,它包含一个硅芯片,上面有微小的加速度计和速度计。
加速度计用来测量围绕三个轴的重
力加速度,而速度计则用来测量转动惯性。
芯片上的微机电系统结构(MEMS)会把这些输入信号转换成数字信号,然后传输到内部的处理器,最后再被转换成角度和转速的信号。
另外,MEMS陀螺仪的准确度是通过抗干扰技术来实现的。
它使用
不同类型的传感器,比如加速度计和速度计,来实现高精度和高稳定性。
此外,它也使用一系列的电子电路来过滤干扰,这样就可以准确
地测量物体的姿态。
总之,MEMS陀螺仪的原理是测量围绕三个轴的重力加速度,进而
测量物体的姿态,达到控制和定位的目的。
它使用MEMS结构和电子电
路来实现高精度和高稳定性,以及抗干扰功能,这使它成为了目前应
用最广泛的传感器之一。
MEMS陀螺仪介绍MEMS陀螺仪(Micro-electromechanical system gyroscope)是一种利用微机电系统技术制造的陀螺仪。
它是一种测量角速度或角位移的传感器。
MEMS陀螺仪在航空航天、导航、惯性导航、虚拟现实、机器人和消费电子等领域中发挥着重要的作用。
本文将介绍MEMS陀螺仪的工作原理、分类、应用领域以及未来发展方向。
一、工作原理MEMS陀螺仪的关键部分是MEMS振动结构,它包括一个振动质量块和与之相连的弹性支撑结构。
当旋转速度发生变化时,质量块会感受到科氏力产生的偏移力,从而引起振动结构的振动变化。
通过测量振动结构的变化,可以得到旋转速度的信息。
二、分类根据工作原理的不同,MEMS陀螺仪可以分为容积扩散器陀螺仪、震动陀螺仪和光纤陀螺仪。
容积扩散器陀螺仪基于压电效应,通过测量振动微结构的容积变化来测量旋转速度。
震动陀螺仪则通过测量加速度和角位移之间的关系来得到旋转速度。
光纤陀螺仪则利用光的干涉效应来测量角速度。
容积扩散器陀螺仪是目前应用较广泛的MEMS陀螺仪,其精度和灵敏度较高。
震动陀螺仪是一种新兴的技术,具有体积小、功耗低等优势,逐渐被广泛应用。
三、应用领域1.导航和惯性测量单元:MEMS陀螺仪可以用于航空航天、导航和惯性测量单元中,用于测量飞行器的姿态和角速度,为导航和控制提供准确的数据。
2.虚拟现实和游戏:MEMS陀螺仪可以用于虚拟现实头盔和游戏手柄中,用于感知用户的头部运动和手柄的姿态变化,实现交互的沉浸式体验。
3.移动设备:MEMS陀螺仪也被广泛应用于手机、平板电脑和智能手表等移动设备中,用于实现屏幕旋转、手势控制和陀螺仪导航等功能。
4.机器人和自动驾驶:MEMS陀螺仪可以用于机器人和自动驾驶车辆中,用于感知和控制机器人或车辆的姿态和运动状态,实现精确的导航和控制。
四、未来发展方向随着技术的不断进步,MEMS陀螺仪仍然具有很大的发展潜力。
未来的发展方向主要包括以下几个方面:1.提高精度和稳定性:MEMS陀螺仪目前的精度和稳定性还有改进的空间。
三轴电子陀螺仪的应用原理1. 什么是三轴电子陀螺仪?三轴电子陀螺仪是一种用于测量和检测物体的方向和姿态的装置。
它通过测量物体周围的旋转和加速度来确定物体的旋转角度和方向。
2. 三轴电子陀螺仪的原理三轴电子陀螺仪主要由三个轴向的陀螺仪组成,分别是X轴、Y轴和Z轴陀螺仪。
每个轴向的陀螺仪都通过测量转动力矩来检测物体的旋转角度。
当物体绕着某个轴旋转时,陀螺仪会受到力矩的作用,力矩的大小与物体的转速成正比。
陀螺仪内部使用微机电系统(MEMS)技术,将微小的机械结构和传感器集成到芯片内部。
陀螺仪的工作原理基于科里奥利效应,当物体绕着某个轴旋转时,会产生位移,从而导致微机电系统中的压电传感器感应到电荷的变化。
通过测量电荷的变化,陀螺仪可以计算出物体的旋转角度。
3. 三轴电子陀螺仪的应用3.1 汽车稳定控制系统三轴电子陀螺仪广泛应用于汽车稳定控制系统中。
通过监测车辆的姿态变化,陀螺仪可以提供实时的车辆倾斜角度和转向角度信息,从而帮助车辆保持稳定性,避免侧翻和失控的情况发生。
3.2 航空航天领域在航空航天领域,三轴电子陀螺仪被广泛应用于飞行器的导航和姿态控制系统中。
陀螺仪可以提供高精度的姿态信息,帮助飞行器保持稳定飞行和准确导航。
3.3 智能手机和平板电脑在智能手机和平板电脑中,三轴电子陀螺仪被用于实现屏幕自动旋转功能。
通过监测设备的姿态变化,陀螺仪可以自动调整屏幕的显示方向,使用户获得更好的操作体验。
3.4 虚拟现实和增强现实在虚拟现实和增强现实应用中,三轴电子陀螺仪用于跟踪用户的头部姿态和运动。
通过实时监测用户的头部运动,陀螺仪可以根据用户的视角调整虚拟场景或增强现实的显示内容,提供更加真实和沉浸式的体验。
3.5 运动追踪和健康监测三轴电子陀螺仪还可以用于运动追踪和健康监测。
通过陀螺仪可以记录用户的运动和活动情况,例如步行、跑步、爬楼梯等,从而提供运动和健康相关数据,帮助用户进行健康管理和运动训练。
4. 结论三轴电子陀螺仪的应用范围非常广泛,包括汽车稳定控制系统、航空航天领域、智能手机和平板电脑、虚拟现实和增强现实,以及运动追踪和健康监测等领域。
3轴陀螺仪传感器和3轴加速度传感器的工作原理三轴陀螺仪传感器和三轴加速度传感器是常见的惯性传感器,能够检测物体的角速度和加速度。
它们在许多领域如航空航天、导航、智能手机等中得到广泛应用。
本文将详细介绍三轴陀螺仪传感器和三轴加速度传感器的工作原理。
一、三轴陀螺仪传感器三轴陀螺仪传感器通过检测物体的角速度来测量物体的旋转运动。
其工作原理基于陀螺效应,即旋转物体在无外力作用时会有一个稳定的自转轴。
陀螺仪传感器利用了这个原理来检测自转轴的方向和角速度。
三轴陀螺仪传感器通常由三个相互垂直的敏感轴组成,分别为X轴、Y轴和Z轴。
每个轴上都包含一个陀螺仪传感器,用于测量相应轴的角速度。
在传感器内部,通常使用MEMS(微电子机械系统)技术构建微小的马达(如振荡陀螺仪)或者利用光学原理(如光纤陀螺仪)来测量角速度。
以MEMS陀螺仪传感器为例,其工作原理如下:在传感器中的微小马达内部有一个旋转的转子。
当传感器发生旋转时,转子会受到陀螺效应的影响,使得转子的旋转轴相对于固定结构发生偏转。
这个转子的偏转量被测量并转换成相应的电压信号。
通过测量在不同轴上的偏转量,可以得到物体在三个轴上的角速度。
二、三轴加速度传感器三轴加速度传感器用来测量物体在三个轴方向上的加速度。
其工作原理基于牛顿第二定律,即物体所受的合力等于物体的质量乘以加速度。
三轴加速度传感器通常由三个相互垂直的敏感轴组成,分别为X轴、Y轴和Z轴。
每个轴上都包含一个加速度传感器,用于测量相应轴的加速度。
在传感器内部,通常使用微机电系统(Micro Electro-Mechanical System,MEMS)技术来构建微小的质量块(如微型弹簧质量块)或者利用电容变化原理来测量加速度。
以MEMS加速度传感器为例,其工作原理如下:在传感器内部有一个微小的振动质量块,其相对于传感器壳体可以自由移动。
当传感器受到加速度时,质量块会受到惯性力的作用而发生位移。
这个位移会导致传感器内部的一些物理量(如电容)发生变化。
三轴(X/Y/Z)MEMS陀螺仪
概述
InvenSense的三轴陀螺仪为全球首例单芯片、以数字输出的三轴MEMS产品,专门为消费性应用产品设计。
本公司三轴产品的特征包含,可将陀螺仪的输出数字化的三个16-bit模拟数字转换器(ADC)、高达±2000°/秒(dps)的全格感测范围(full-scale range)、可程序化的低通滤波器、I2C或SPI序列界面(serial interface)、低电压操作(2.1V到3.6V),以及4x4x0.9mm的QFN包装。
此系列产品包含ITG-3050与MPU-3050。
本公司三轴产品会将过滤后的陀螺仪数据传达至序列通信总线(serial communications bus)。
ITG-3050仅支援输出原始三轴陀螺仪数据。
ITG-3050有第二个I2C主要感测总线(master sensor bus),提供可直接升级至MPU系列产品的路径,使其能与InvenSense的软件解决方案结合。
MPU产品特征有内建之数字运动感测处理(DMP:Digital Motion Processor)硬件加速引擎、最低512 byte的FIFO,以及含可连接至其他厂牌数字加速器的第二个I2C主要感测总线(sensor bus),感测线性与旋转动作,提供完整的六轴融合演算数据。
内建的FIFO与感测总线(sensor bus),可缩短系统运算时间,降低系统耗电量。
当FIFO使系统微处理器实时读取感测数据并进入休眠状态的同时,专用感测总线,让产品不须另外连接处理器,就可直接从外接的加速器取得数据,使MPU读取更多资料。
因应现今多功能手机,三轴的MPU-3050可为如游戏与在地服务等常见的应用,提供精确的1:1真实动作追踪功能。
另外,32-bit的DMP引擎,支持进阶人机界面(UI:User Interface)功能,启动如空中签字(AirSign)的签名验证、随意触控(TouchAnywhere)的应用与导航控制、动作指令(MotionCommand)的手势快捷方式等,利用手势或使用文字辨识等的应用。
专门为网络电视游戏摇杆与遥控器等可携式消费性电子产品设计的MPU-3050,内建了DMP,大幅降低了系统成本。
具运动感测功能之手持式产品的系统处理条件,可藉由整合之运动传感器及DMP,搭配其DMP及内建于系统RF芯片的处理器达成。
此搭配不但能降低成本,也能应用于众多不同平台上。
为了因应业界产品快速的发展与变动,本公司提供运动感测应用(MotionApp)平台于使用MPU 产品系列的厂商。
运动感测应用平台含可进行运动处理解决方案的核心演算引擎,并含可简易连接到这些引擎的API层(layer)。
另外,如手势辨识等的运动感测应用范例,可加快采用运动感测功能之消费性电子产品的上市时间。
本公司备有所有三轴产品的评估板(evaluation board)与参考设计套件(reference design kit)。