控制工程 吉林大学考研资料精品PPT课件
- 格式:pptx
- 大小:3.03 MB
- 文档页数:17

吉大《控制工程基础》(三)第三章自动控制系统的时域分析利用labview进行信号的时域分析信号的时域分析主要是测量测试信号经滤波处理后的特征值,这些特征值以一个数值表示信号的某些时域特征,是对测试信号最简单直观的时域描述。
将测试信号采集到计算机后,在测试VI 中进行信号特征值处理,并在测试VI 前面板上直观地表示出信号的特征值,可以给测试VI 的使用者提供一个了解测试信号变化的快速途径。
信号的特征值分为幅值特征值、时间特征值和相位特征值。
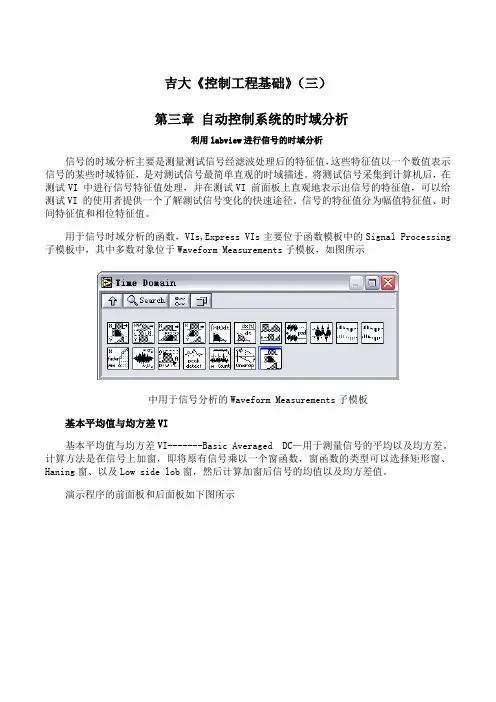
用于信号时域分析的函数,VIs,Express VIs主要位于函数模板中的Signal Processing 子模板中,其中多数对象位于Waveform Measurements子模板,如图所示中用于信号分析的Waveform Measurements子模板基本平均值与均方差VI基本平均值与均方差VI-------Basic Averaged DC—用于测量信号的平均以及均方差。
计算方法是在信号上加窗,即将原有信号乘以一个窗函数,窗函数的类型可以选择矩形窗、Haning窗、以及Low side lob窗,然后计算加窗后信号的均值以及均方差值。
演示程序的前面板和后面板如下图所示Basic Averaged DC—RMS演示程序的前面板Basic Averaged DC—RMS演示程序的后面板平均值与均方差值平均值与均方差值VI------Averaged DC—同样也是用于计算信号的平均值与均方差值,只是Averaged DC—的输出是一个波形函数,这里我们可以看到加窗截断后,正弦信号的平均值和均方差随时间变化的波形。
编写程序演示Average DC----Averaged—的使用方法,程序的后面板和前面板如下图所示。
吉大《控制工程基础》(六)第六章 控制系统的综合校正一、简要说明系统设计的步骤1) 根据用户提出的性能指标和被控对象的具体工作环境,根据条件进行调研、查阅技术资料,确定合理的设计指标,作为设计的依据;2) 初步确定控制方案,如是用计算机控制还是一般的模拟控制,驱动方式是采用电动还是液压气动,完成系统的职能方框图,写出可行性方案论证报告;3) 具体进行设计:根据初步确定的合理的设计指标进行总体设计,合理地设计或选择元部件,尤其是对测量元件的选择要给予充分的注意,组成系统后,进行动、静态分析计算,同时进行计算机仿真。
若不符合指标要求,则要进行校正,使其满足指标要求;4) 实验原理性试验:根据具体设计,在实验室建造系统的原型机,并进行试验,按照试验的结果调整系统部件中的有关参数,排除故障,进一步完善具体设计。
5) 提交相机通过技术鉴定:在实验室试验的基础上,考虑到实际的使用条件进行样机生产。
再通过对样机的试验考核,鉴定其是否全面满足设计指标,基本符合后才可决定小批量生产,经过实际应用的考验,最后才能通过技术鉴定,投入小批量生产,进行定点实际应用。
二、简述比例控制的作用1) 在系统中增大比例系数Kp 可减小系统的稳态误差以提高稳态精度。
2) 增加Kp 可降低系统的惯性,减小一阶系统的时间常数,改善系统的快速性。
3) 提高Kp 往往会降低系统的相对稳定性,甚至会造成系统的不稳定。
三、简要说明超前校正网络的步骤超前串联校正的作用是提供了一个超前相角,从而增大闭环系统的相角裕度,改善控制系统的稳定性和快速性。
用伯德图方法设计超前校正网络的步骤如下:1) 绘制未校正系统的伯德图,计算相角裕度,判定是否满足要求,是否需要引入合适的超前校正网络;2) 确定所需的最大超前相角;3) 利用11sin +-=ααϕm 计算α;4) 计算αlg 10,在未校正系统的幅值增益曲线上,确定与αlg 10-对应的频率。
当m c ωωω==时,超前校正网络能提供αlg 10(dB )的幅值增量,因此经过校正后,原有幅值增益为αlg 10-的点将变成新的与0dB 的交点,对应的频率就是新的交接频率m c ωω=;5) 计算极点频率αωm p =和零点频率αωαm p z ==; 6) 绘制校正后的闭环系统伯德图,检查系统是否满足要求,若不满足要求,则需重新设计;7) 确定系统的增益,以保证系统的稳态精度,抵消由超前校正网络带来的衰减1/α。