四旋翼DIY指南
- 格式:pdf
- 大小:107.26 KB
- 文档页数:5
四旋翼飞行器搭建教程(译自————加里斯.欧文)本文将带你通过建立自己的飞行控制器(飞空软件),同时教你工作的具体细节。
这些信息很难找到,特别是那些本身就不是航天工程师的人!就我个人而言,我用了六个月,因为我花费了太多的时间查找bug和调试bug,但通过这篇文章你可以短期收获同样的经验。
我会教你避开陷阱,这样你就不会像我一样浪费时间。
第一个关键是你对硬件的选择。
我选择从零开始建立自己系统,在这一阶段的时候我都不知道RC(remote controlled 遥控; radio coding 无线电编码; )和飞行器是如何飞行的,这是一个巨大错误。
开始我以为,通过自行购买附加电路,芯片和传感器能省很多钱,结果最终我花了一大笔钱!放过自己吧,直接去购买ardupilot 2.5控制板,组装你的直升机,了解遥控,了解飞行原理,然后回到这里。
这个板子本质上是只是一个连有一些传感器Arduino(开源主控板,可查/view/1268436.htm?fr=aladdin),和我们将在这篇文章介绍的程序——我们自己编写的。
你得将所有东西连接起来,你的四旋翼飞机才能得飞:当然你也得会用优秀的arducopter软件。
本项目(ardupilot)由3D Robotics 提供赞助,这意味着他们销售所设计的硬件获利,并将所得利润回馈社区。
该软硬件是完全开源的,所有人可以免费复制下载。
你可以直接从他们那里购买,或者从Hobbyking (named HKPilot) and RCTimer (named ArduFlyer).购买相同的拷贝件。
在这篇文章中,我将假定您有ardupilot硬件——其本质上上是附传感器Arduino。
如果你选择忽视我的建议,并且建立自己的硬件,或使用Arduino电路板,那么您需要更换的底层代码(HAL库)。
我也会以为你在X配置(x型四旋翼),+ / X(两种四旋翼配置)和六/八旋翼飞行器之间切换(只是不同的电机的组合),配置的改变不会让它在本文有任何实质性的区别。
自制四轴飞行器之路
四轴飞行器,又称四旋翼飞行器,简称四轴、四旋翼。
四轴飞行器的四个螺旋桨与电机直接相连,通过改变电机转速获得旋转机身的力,从而调整自身姿态。
四轴的叶片转速极高,有一定的危险性,一般不能在室内飞,特别是在调试过程中更加不稳定,轻则炸鸡撞坏物品,重则伤到人。
我做四轴的主要目的是为了学习飞控算法,这个过程肯定少不了调试,为了安全,我选择做一个小一点的,手掌那么大的四轴,叶片的威力比较小,价格也便宜,即使摔坏也不心疼。
这种小四轴一般采用PCB做机架,用720空心杯电机代替无刷电机,用MOS管代替电调,电池采用3.7v锂聚合物电池(尺寸跟手机电池差不多,但是放电电流要大很多),遥控用2.4G无线模块,或者用蓝牙连接手机,成本100左右,续航时间大概6-7分钟,遥控距离在10米以内。
选择零件
四轴上最重要的就是飞控,所以第一步:选择飞控。
市面上有许多现成飞控,也可以自己用电子元件做一个分控。
有很多有名的开源飞控,例如KK,QQ,匿名,MultiWii/MWC,APM/PIX等。
KK、QQ飞控功能较少,只有基本的四轴飞行功能,甚至不支持GPS。
匿名飞控是国内新出现的飞控,功能比以上两个要多,价格也要贵很多。
MultiWii/MWC飞控是基于arduino的,支持GPS,能路线规划,在线调试。
APM也是基于arduino的,功能更为齐全,硬件也更为复杂,飞控中有两块单片机,分别执行不同功能。
APM已将arduino的性能开发到极限,于是有了升级版PIX,从arduino 转到了STM32,处理速度提升了10倍,同样用了两块不同型号的STM32协同运作,是目前已知的最好的开源飞控。
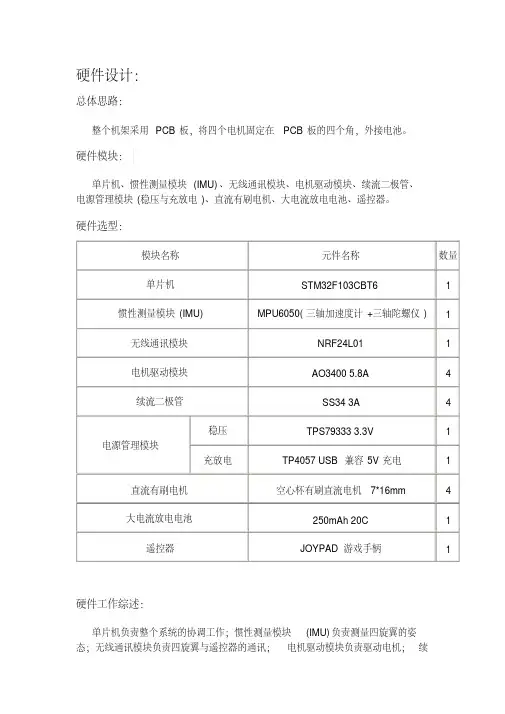
硬件设计:总体思路:整个机架采用PCB板,将四个电机固定在PCB板的四个角,外接电池。
硬件模块:单片机、惯性测量模块(IMU)、无线通讯模块、电机驱动模块、续流二极管、电源管理模块(稳压与充放电)、直流有刷电机、大电流放电电池、遥控器。
硬件选型:模块名称元件名称数量单片机STM32F103CBT6 1 惯性测量模块(IMU) MPU6050(三轴加速度计+三轴陀螺仪) 1 无线通讯模块NRF24L01 1电机驱动模块AO3400 5.8A 4续流二极管SS34 3A 4稳压TPS79333 3.3V 1 电源管理模块充放电TP4057 USB兼容5V充电 1 直流有刷电机空心杯有刷直流电机7*16mm 4大电流放电电池250mAh 20C 1 遥控器JOYPAD游戏手柄 1硬件工作综述:单片机负责整个系统的协调工作;惯性测量模块(IMU)负责测量四旋翼的姿态;无线通讯模块负责四旋翼与遥控器的通讯;电机驱动模块负责驱动电机;续流二极管负责对电机进行续流;电源管理模块中的稳压模块负责整个系统的供电,电源管理模块中的充放电模块负责对电池充电;有刷电机负责提供四旋翼的飞行动力;大电流放电电池负责四旋翼的能量来源;遥控器负责对四旋翼进行遥控和控制。
硬件设计功能模块图:实际效果图与相关参数:尺寸:对角电机轴距10x10cm重量:33.2g(带电池)软件设计:总体思路:惯性测量模块(IMU)测量出当前飞机的三轴加速度与三轴角速度并传送给单片机处理,由单片机进行基于四元数的姿态解算,求解出当前飞机的pitch、roll、yaw三个角度值,然后根据这三个角度经过PID控制运算,输出四路PWM控制四个直流有刷电机的加减速从而达到飞机的平衡悬停。
其中,惯性测量模块(IMU)的加速度计由于噪声比较大,所以需要对其进行滤波处理;而遥控器则是对飞机进行实时的姿态控制;最后由于四旋翼制作的特殊性,在调试PID参数阶段会频繁的烧写程序,鉴于此,笔者开发了基于NRF24L01的Bootloader技术,免除了烧写Flash的物理连线限制,可实现远程程序一键下载。
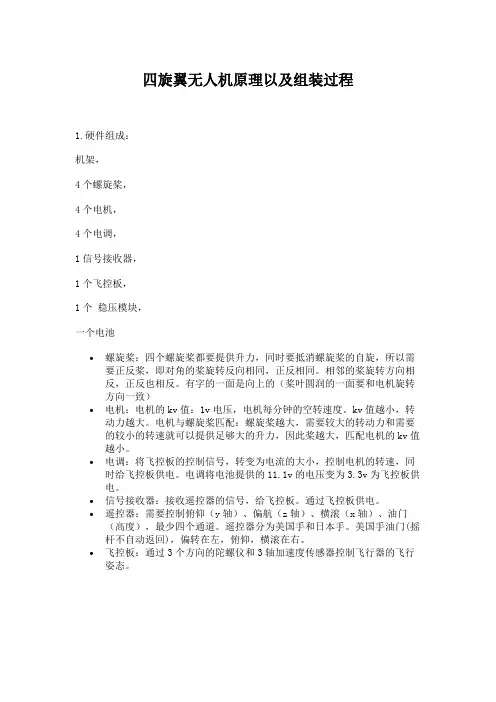
四旋翼无人机原理以及组装过程1.硬件组成:机架,4个螺旋桨,4个电机,4个电调,1信号接收器,1个飞控板,1个稳压模块,一个电池•螺旋桨:四个螺旋桨都要提供升力,同时要抵消螺旋桨的自旋,所以需要正反桨,即对角的桨旋转反向相同,正反相同。
相邻的桨旋转方向相反,正反也相反。
有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致)•电机:电机的kv值:1v电压,电机每分钟的空转速度。
kv值越小,转动力越大。
电机与螺旋桨匹配:螺旋桨越大,需要较大的转动力和需要的较小的转速就可以提供足够大的升力,因此桨越大,匹配电机的kv值越小。
•电调:将飞控板的控制信号,转变为电流的大小,控制电机的转速,同时给飞控板供电。
电调将电池提供的11.1v的电压变为3.3v为飞控板供电。
•信号接收器:接收遥控器的信号,给飞控板。
通过飞控板供电。
•遥控器:需要控制俯仰(y轴)、偏航(z轴)、横滚(x轴)、油门(高度),最少四个通道。
遥控器分为美国手和日本手。
美国手油门(摇杆不自动返回),偏转在左,俯仰,横滚在右。
•飞控板:通过3个方向的陀螺仪和3轴加速度传感器控制飞行器的飞行姿态。
2.飞行原理1.1 PID控制(P:比例控制 I:积分控制 D:微分控制):•比例控制:将控制器输入的误差按照一定比例放大•积分控制:但是处于稳态的系统也会有一定的误差,为了消除稳态下的误差,将稳态下的误差在时间上积分,积分项随着时间的增大会趋于0,因此积分减少了比例控制带来的稳态误差•微分控制:根据输入误差信号的变化率(微分)预测误差变化的趋势,避开被控对象的滞后特性,实现超前控制•参数调整:根据被控过程的特性不断调整PID控制器的比例系数、积分时间和微分时间的大小1.2运动原理四轴旋翼分为“+”和“x”型,“+”型飞控板的正前方是旋翼,“x”型飞控板正前方为夹角等分线。
如下图为“x”型四旋翼的飞行原理图。
•俯仰:绕y轴旋转,前低后高爬升,1,2转速减小,3,4转速增大,pitch 为负•横滚:绕x轴旋转,2,3转速增大,1,4转速减小,机体右滚,roll值为正•偏航:绕z轴旋转,假设2,4顺时针,1,3逆时针,当2,4转速增大,1,3转速减小时,机头右偏,yaw值为正•垂直:调节油门大小,四个旋翼的转速同时变大或者变小pitch yaw roll值分析:•俯仰角(pitch):正半轴位于坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负•滚转角(roll): 机体向右滚为正,反之为负•偏航角(yaw):机头右偏航为正,反之为负3.遥控器的使用•模式设置:固定翼模式/直升机模式(四轴飞行器为固定翼,靠螺旋桨提供升力)•解锁: 油门最低,方向舵最右,副翼(横滚)最右。
多旋翼飞行器diy教学计划英文回答:DIYing a multirotor aircraft can be a challenging but rewarding project. It allows you to learn about aerodynamics, electronics, and programming while having fun building your own flying machine. In this DIY tutorial, I will guide you through the process of building a multirotor aircraft from scratch.1. Planning and Research:Before starting the project, it is essential to do thorough planning and research. This includes understanding the different types of multirotor configurations (such as quadcopters, hexacopters, or octocopters) and their pros and cons. Additionally, you need to research the components required, such as motors, propellers, flight controllers, and batteries. This research will help you make informed decisions and ensure compatibility between the components.中文回答:DIY一架多旋翼飞行器可能是一个具有挑战性但有回报的项目。

如何自主装一台简单初级的四旋翼飞行器四旋翼飞行器最近几年来相当火爆,不少初学者想弄一台来飞一飞,但购买价格不便宜而且也不能够较为全面的掌握航模的各种特点。
自己DIY一台四旋翼飞行器并不算复杂,因为目前四旋翼飞行器的各个组件都已经基本实现了模块化,可以购买各种模块来搭建一架属于自己的四旋翼无人机,享受飞行的乐趣,并且自主搭建具有更高的灵活度,能够装上自己想要有的各种功能,还可以更好的了解这种航模的大致结构特点,从而在实践中一步步从初级玩家走向高级玩家。
一、工具/原料四轴飞行器机架一套、四个无刷电机、四个电子调速器、飞控一个、航模锂电池一个、遥控器以及接收机各一个、正螺旋桨两个、反螺旋桨两个、电烙铁一套、1.5mm 2.0mm 2.5mm 3.0mm内六角螺丝刀各一个。
推荐配置:20A电调四个KV980电机四个2200mah3S锂电池F450或S500(450-500轴距都可以)机架一套飞控一个6通道以上遥控器一套(包括飞行器端的接收机)1045正反桨各两个组装完成后请检查:飞行器总重量<=四个电机在满油门情况下产生的最大推力之和再乘以(2/5)推荐按以上这个重量搭配,飞行性能更佳。
以上配置的四旋翼飞行器计算出来的最佳起飞重量为1300g左右。
二、方法/步骤(1)先用相应口径的螺丝刀将无刷电机安装在机架的四个机臂上(顺时针拧紧,逆时针拧松),将电机上的香蕉头和无刷电机的香蕉头随机相接,注意这时不要装上螺旋桨。
注:1. 电机和电调上面没有自带香蕉头,这时需要你自己用电烙铁将香蕉头中是公头的那三个焊接在电机的三根电线的端头,母头的就焊接在电子调速器上(电调上面一般都带有母头的,不需要自己焊接);2.这时先随机相接,如果后续测试电机没有按照预定的方向旋转就调换其中的任意两根即可改变电机的转动方向。
(2)、接下来是将电调焊接至飞行器的整块电路板上面,每一个电调有两根电线需要焊接在主供电板上面,一共有八个焊点,焊接完毕后要注意有的飞控上面带有电源管理模块,如果有这种情况请查阅飞控的说明书,安装要求将电源管理模块同时焊接在主供电板上面,接下来就是在供电板上面焊接上航模电源的插座了,以T插为例,应该焊接上T插的公头,总之你的电池上面是某某型插的公/母头你就焊接上母/公头就行了。
四轴飞行器DIY入门篇一:主要部件介绍及选购楼主打小就喜欢会飞的东西,《航空知识》从初一就开始看(伪军迷一枚),第一架航模是橡皮筋动力的塞斯纳,但是随着学业和工作关系,一直没有真正的堕入模界,直到7年前离开家到外地工作,有自己的一片小天地后,就一发不可收拾,楼主是静态动态双修,今天借张大妈的平台,给大家介绍下四轴飞行器DIY。
为啥要玩四轴呢?第一是四轴DIY的门槛近些年一路走低,各式各样的飞控层出不穷(这里要感谢那些Do飞控的大神们!),不必花费太多就能拥有一架四轴飞行器;第二就是咱能飞的空间越来越萎缩,想方便的在市内去飞固定翼实在是难找地方,四轴无需太大的场地就能爽飞。
下面进入正题:什么是四轴飞行器?通俗点说就是拥有四个独立动力旋翼的飞行器,四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴。
四轴飞行原理为什么四轴能飞起来?没有机翼,升降舵,方向舵,他怎么控制升降/方向?飞行器的主要飞行动作有垂直(升降)运动,俯仰运动,前后运动,横滚运动,侧向运动,偏航运动:垂直(升降)运动最好理解,就是油门控制,推油门上升,拉油门降低,所有升力来自旋翼。
仰俯运动,在固定翼中是靠推拉升降舵来实现,四轴则是通过控制其中2个(或4个)轴线上的电机转速来实现,如下图所示:1号电机提速,3号电机降速,四轴延X轴方向仰起。
并且,仰俯运动的同时,四轴也会做前后运动,四轴发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。
向后飞行与向前飞行正好相反而已。
横滚运动,在固定翼中是靠控制副翼来实现,四轴则也是通过控制其中2个(或4个)轴线上的电机转速来实现,和仰俯运动控制方式一样,只是作用的电机不同而已,如下图所示:4号电机提速,2号电机降速,四轴延Y轴方向翻滚。
并且,小幅度的横滚运动,会导致四轴做侧向运动。
偏航运动,在固定翼中是靠控制方向舵来实现,四轴则是通过反扭力来实现。

文中所用到的所有MK2.0 DIY 套件均由老郭的多旋翼DIY 俱乐部/提供,有需要的朋友可以随时通过淘宝联系俱乐部。
提供免费的DIY 培训以及常年的MK 设备维修,MK2.0 DIY 套件和售后服务。
联系QQ: 490535209 MK 多旋翼DIY 俱乐部群55848675MK2.0 入门级DIY 全教材1国内四轴越来越火热,但是很多入门级的玩家还是遇到不少的问题。
老郭玩MK2.0也有2月有余了。
略有一些经验,与大家分享一下。
如果说明中还有写的不明白的地方,可以加入老郭MK 技术答疑专用群55848675 ,老郭将定期回答所有朋友的问题。
万事开头难,四轴主要是结构和电子部分。
而结构和电子结合点就是电机电调和桨,这三个要是匹配不好。
做出来的四轴很容易短命,不是拉力不够,飞不起来,就是电调发热太严重,烧mos 管,或者电机发热等等。
问题非常多,我也走了很多弯路。
首先我们得定位一下这架四轴的主要作用。
我是准备拿来练习飞行3d 的,另外在晚上想玩的时候能挂载夜航灯(50克),想航拍的时候能挂载微型摄像机(200克)。
飞行时间,由于是自己玩,我觉得8-15分钟就可以了。
然后选择电机和桨。
首先电机得选择盘式电机。
原因是四旋翼是直接驱动,需要大扭矩,电机直径越大KV 值和材料相同的情况下扭矩就越大。
当然电机也可以通过增加高度,来获得大扭矩(车用无刷就是这样的),但是这样电机自重就会很大,一个电机就有几百克,很不划算。
所以盘式电机(又名铃铛电机)是最佳的选择。
电机的槽数理论上是越多越好的,但是市场上基本上都是12槽的。
18和24的极少,综合德国人的推荐一个电机,觉得这个还不错,于是在国内选择了一个参数非常一致的电机1文中所用到的所有MK2.0 DIY 套件均由老郭的多旋翼DIY 俱乐部/ 提供,有需要的朋友可以随时通过淘宝联系俱乐部。
提供免费的DIY 培训以及常年的MK 设备维修,MK2.0 DIY 套件和售后服务。
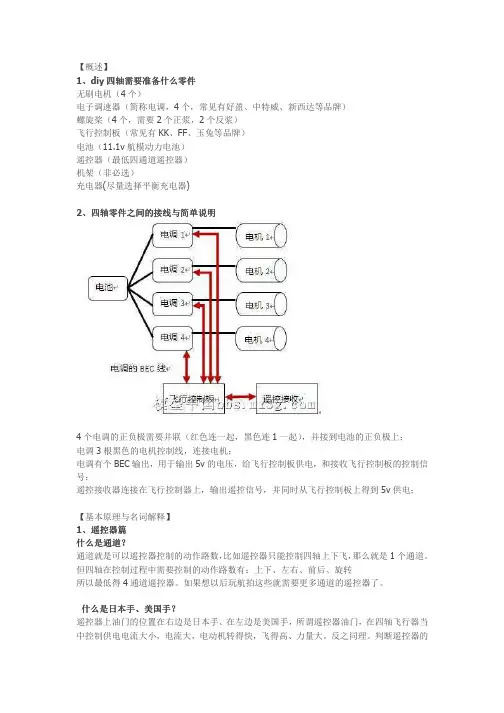
【概述】1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)2、四轴零件之间的接线与简单说明4个电调的正负极需要并联(红色连一起,黑色连1一起),并接到电池的正负极上;电调3根黑色的电机控制线,连接电机;电调有个BEC输出,用于输出5v的电压,给飞行控制板供电,和接收飞行控制板的控制信号;遥控接收器连接在飞行控制器上,输出遥控信号,并同时从飞行控制板上得到5v供电;【基本原理与名词解释】1、遥控器篇什么是通道?通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。
但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转所以最低得4通道遥控器。
如果想以后玩航拍这些就需要更多通道的遥控器了。
什么是日本手、美国手?遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。
反之同理。
判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
2、飞行控制板篇一般简称飞控就是这个东西了。
飞控的用途?如果没有飞控板,四轴飞行器就会因为安装、外界干扰、零件之间的不一致型等原因形成飞行力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成),如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
什么是x模式和+模式?购买飞控的时候老板都要问这个问题,刷买什么模式的,以上就是区别。
X模式要难飞一点,但动作更灵活。
四轴飞行器DIY入门篇一:主要部件介绍及选购2014-09-21 10:49分类:模型楼主打小就喜欢会飞的东西,《航空知识》从初一就开始看(伪军迷一枚),第一架航模是橡皮筋动力的塞斯纳,但是随着学业和工作关系,一直没有真正的堕入模界,直到7年前离开家到外地工作,有自己的一片小天地后,就一发不可收拾,楼主是静态动态双修,今天借张大妈的平台,给大家介绍下四轴飞行器DIY。
为啥要玩四轴呢?第一是四轴DIY的门槛近些年一路走低,各式各样的飞控层出不穷(这里要感谢那些Do飞控的大神们!),不必花费太多就能拥有一架四轴飞行器;第二就是咱能飞的空间越来越萎缩,想方便的在市内去飞固定翼实在是难找地方,四轴无需太大的场地就能爽飞。
下面进入正题:什么是四轴飞行器?通俗点说就是拥有四个独立动力旋翼的飞行器,四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴。
四轴飞行原理为什么四轴能飞起来?没有机翼,升降舵,方向舵,他怎么控制升降/方向?飞行器的主要飞行动作有垂直(升降)运动,俯仰运动,前后运动,横滚运动,侧向运动,偏航运动:垂直(升降)运动最好理解,就是油门控制,推油门上升,拉油门降低,所有升力来自旋翼。
仰俯运动,在固定翼中是靠推拉升降舵来实现,四轴则是通过控制其中2个(或4个)轴线上的电机转速来实现,如下图所示:1号电机提速,3号电机降速,四轴延X轴方向仰起。
并且,仰俯运动的同时,四轴也会做前后运动,四轴发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。
向后飞行与向前飞行正好相反而已。
横滚运动,在固定翼中是靠控制副翼来实现,四轴则也是通过控制其中2个(或4个)轴线上的电机转速来实现,和仰俯运动控制方式一样,只是作用的电机不同而已,如下图所示:4号电机提速,2号电机降速,四轴延Y轴方向翻滚。
并且,小幅度的横滚运动,会导致四轴做侧向运动。
偏航运动,在固定翼中是靠控制方向舵来实现,四轴则是通过反扭力来实现。
四悬翼制作.pdf文武杨晓波早在1907年,法国人布勒盖特·瑞切(Bréguet Richet)所发明的世界第一架有人架势四旋翼飞行器“Gyropl ane No.I”就已能升上天空。
但由于构造复杂、飞行员不易操纵等原因,四旋翼飞行器的发展并非一帆风顺。
近年来,随着新材料、微机电、微小型飞行控制等技术的进步,微小型多旋翼无人飞行器逐渐成为迅速发展的重点。
与常规旋翼飞行器如传统布局的直升机等相比,多旋翼飞行器结构更为紧凑,动力利用效率高,并且四只旋翼扭力矩可相互抵消,无需专门的反扭矩旋翼。
多旋翼飞行器实现微小型化后,特别适合在近地面环境(室内、街巷和丛林)中执行监视、侦察等任务,具有广阔的军用和民用前景。
目前,Air To Air公司已开发成功多款1kg级微小型多旋翼Draganfly系列飞行器,在可靠性、适应性和多用途方面已较为成熟。
本文以该系列飞行器中的四旋翼飞行器为例,揭示该类微型无人飞行器的奥秘——Draganfly四旋翼飞行器采用的柔性防抖挂小巧的外观和结构Draganfly四旋翼飞行器从外形上看相当小巧,完全可以把它放在摊开的手掌中放飞,但所谓“麻雀虽小、五脏俱全”,别看它个头小,飞行器的各个组成部分却一样不少。
总体结构整套飞行器由机体、手持式遥控装置、无线视频眼镜、无线视频基站、充电装备以及多种负载和备附件组成。
整套飞行器可装进一个不大的便携箱中,便于人员背携。
Draganfly四旋翼飞行器一侧马达臂上的LED导航灯飞行器的核心是机体最中央的部分,外观呈盾形,其外壳由高强度碳纤维制成,保护着其内部设置的多个基本传感器,盾形外壳下沿则是机体电池的安装位置;再下方是负载区,可利用随机搭配的柔性防抖挂架搭载多种侦察器材。
当然,根据用户需要,也可定制专用负载挂架以搭载其他特制器材。
机体的起降架同样采用柔性减震的碳纤维材质,滑撬式设计,安装于盾形外壳后方1/3处,可快速拆卸。
★四轴飞行diy全套入门教程(从最基础的开始)★首先声明本人也是菜鸟,此教程就是从一个菜鸟的角度来讲解,现在论坛上的帖子都突然冒很多名词出来,又不成体系,我自己开始学的时候往往一头雾水,相信很多新手也一样。
所以在这个帖子里面,我都会把自己遇到的疑惑逐一讲解。
【概述】1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)2、四轴零件之间的接线与简单说明4个电调的正负极需要并联(红色连一起,黑色连1一起),并接到电池的正负极上;电调3根黑色的电机控制线,连接电机;1电调有个BEC输出,用于输出5v的电压,给飞行控制板供电,和接收飞行控制板的控制信号;遥控接收器连接在飞行控制器上,输出遥控信号,并同时从飞行控制板上得到5v供电;【基本原理与名词解释】1、遥控器篇什么是通道?通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。
但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转所以最低得4通道遥控器。
如果想以后玩航拍这些就需要更多通道的遥控器了。
什么是日本手、美国手?遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。
反之同理。
判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
2、飞行控制板篇一般简称飞控就是这个东西了。
飞控的用途?如果没有飞控板,四轴飞行器就会因为安装、外界干扰、零件之间的不一致型等原因形成飞行力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成),如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
四旋翼飞行器搭建教程(译自————加里斯.欧文)本文将带你通过建立自己的飞行控制器(飞空软件),同时教你工作的具体细节。
这些信息很难找到,特别是那些本身就不是航天工程师的人!就我个人而言,我用了六个月,因为我花费了太多的时间查找bug和调试bug,但通过这篇文章你可以短期收获同样的经验。
我会教你避开陷阱,这样你就不会像我一样浪费时间。
第一个关键是你对硬件的选择。
我选择从零开始建立自己系统,在这一阶段的时候我都不知道RC(remote controlled 遥控; radio coding 无线电编码; )和飞行器是如何飞行的,这是一个巨大错误。
开始我以为,通过自行购买附加电路,芯片和传感器能省很多钱,结果最终我花了一大笔钱!放过自己吧,直接去购买ardupilot 2.5控制板,组装你的直升机,了解遥控,了解飞行原理,然后回到这里。
这个板子本质上是只是一个连有一些传感器Arduino(开源主控板,可查/view/1268436.htm?fr=aladdin),和我们将在这篇文章介绍的程序——我们自己编写的。
你得将所有东西连接起来,你的四旋翼飞机才能得飞:当然你也得会用优秀的arducopter软件。
本项目(ardupilot)由3D Robotics 提供赞助,这意味着他们销售所设计的硬件获利,并将所得利润回馈社区。
该软硬件是完全开源的,所有人可以免费复制下载。
你可以直接从他们那里购买,或者从Hobbyking (named HKPilot) and RCTimer (named ArduFlyer).购买相同的拷贝件。
在这篇文章中,我将假定您有ardupilot硬件——其本质上上是附传感器Arduino。
如果你选择忽视我的建议,并且建立自己的硬件,或使用Arduino电路板,那么您需要更换的底层代码(HAL库)。
我也会以为你在X配置(x型四旋翼),+ / X(两种四旋翼配置)和六/八旋翼飞行器之间切换(只是不同的电机的组合),配置的改变不会让它在本文有任何实质性的区别。
四旋翼飞行器制作方法四旋翼飞行器是一种多旋翼飞行器,由四个对称分布的螺旋桨驱动,具备垂直起降和悬停能力。
它在军事、民用、娱乐等领域有广泛的应用,制作四旋翼飞行器可以满足个人飞行兴趣、科学研究、拍摄摄影、物流运输等需求。
下面将介绍四旋翼飞行器的制作方法。
首先,制作四旋翼飞行器需要准备一些必要的器材和材料,包括电机、电调、飞控、无线电遥控器、锂电池、螺旋桨、机架等。
1. 机架的制作机架是支撑整个飞行器的骨架,可以通过购买现成的机架或自行制作。
自行制作机架时,可以使用轻质的材料如碳纤维板或铝合金,根据设计要求切割、钻孔和组装成所需形状。
2. 安装电机和电调将选购的电机安装在机架的四个角上,每个电机安装一个电调。
通过电缆将电机与电调相连接,确保电机能够正常工作并受到电调的控制。
3. 飞控系统的安装飞控是四旋翼飞行器的核心控制系统,负责接收遥控器的指令并控制电机输出推力。
将飞控安装在机架上的中心位置,然后将其与电调连接,确保飞控系统正常工作。
4. 安装无线电遥控器选择适用于飞行控制的无线电遥控器,并将其与飞控系统配对。
遥控器通过无线信号发送指令,控制四旋翼飞行器的起航、降落、悬停、飞行方向等动作。
5. 安装锂电池选择适用于四旋翼飞行器的锂电池,并根据飞行器的功率需求选择合适的电池容量。
将锂电池安装在机架上的合适位置,并使用电缆将其与飞控系统和电调连接。
6. 安装螺旋桨选择适用于飞行器的螺旋桨,并按照电机的转向将螺旋桨安装在机架上的电机上。
确保螺旋桨安装牢固且方向正确,以保证飞行器能够正常运转。
7. 连接电路和调试将飞控系统、电调、电机、无线电遥控器、锂电池等各个部件互相连接,确保电路连接正确。
此外,还需要进行各个系统的校准和参数设置,以确保四旋翼飞行器能够稳定飞行和操控。
最后,完成飞行器的组装后,应进行地面测试和飞行测试,确保飞行器各项功能正常。
在飞行测试中,注意选择合适的场地和条件,确保飞行安全。
飞行器的操控和调校可能需要一些时间和经验,建议初学者在有经验的指导下进行操作。