第六章 小地区控制测量计算题J土木
- 格式:doc
- 大小:393.50 KB
- 文档页数:3
第七章控制测量试题7.1.1名词解释题(2)图根点 (3)图根控制测量 (4)大地点 (5)导线(6)导线测量 (7)坐标增量闭合差 (8)三角高程测量 (9)高程闭合差(10)两差改正图根点:直接为测绘地形图而布设的控制点,作为测图的根据点。
图根控制测量:为测绘地形图而布设控制点进行的控制测量,一般有图根三角测量及图根导线测量两种。
大地点:国家基本控制网的各类控制点,包括三角点、导线点、水准点及GPS点。
导线:将测区内相邻控制点连成直线而构成的折线。
导线测量:在测区布设控制点成闭合多边形或折线形,测量导线边长及导线边所夹的水平角。
坐标增量闭合差:闭合导线所有坐标增量总和,理论上应为零,如不为零,其值即为坐标增量闭合差。
附合导线坐标增量闭合差是指坐标增量总和与已知两高级点之间坐标差的较差。
三角高程测量:在测站上通过观测目标的竖角,丈量仪器高及目标高,已知测站与目标间水平距,按三角学的原理,便可求得测站与目标的高差。
高程闭合差:测量得高差总和不等于理论值或不等于所附合的两已知点的高程之差。
7.1.2填空题(1)控制测量主要包括_平面_控制测量和_高程__控制测量;前者主要的方法有_三角测量__、_三边测量__、_边角测量__、_导线测量__等,后者主要方法有__水准测量_和_三角高程测量__。
(3)直接为测图服务而建立的控制测量称_图根_控制测量,它的精度比较低,边长短,一般可采用_小三角测量_、__测角交会_、__侧边交会__、导线测量_等方法进行。
(8)小地区平面控制网应视测区面积大小分级,建立测区的__首级控制__和___图根控制___。
(9)小地区控制网的控制点密度通常取决于_测图比例尺_和 __地物地貌的复杂程度_。
(10)导线按形状可分为:①_闭合导线_;②__附和导线__;③___支导线___。
(11)闭合导线角度闭合差的分配原则是_平均分配角度闭合差,而符号相反。
如果不能平均分配,则可以对短边夹角和长、短边夹角给以较大的改正数。
地大《测量学》(六)
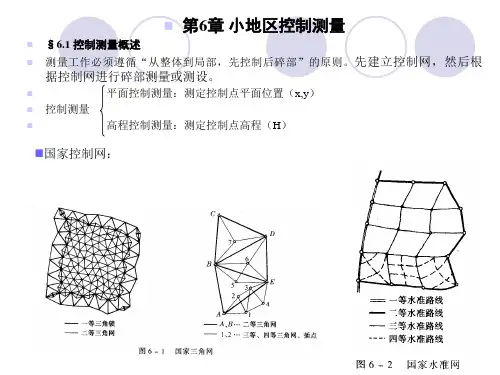
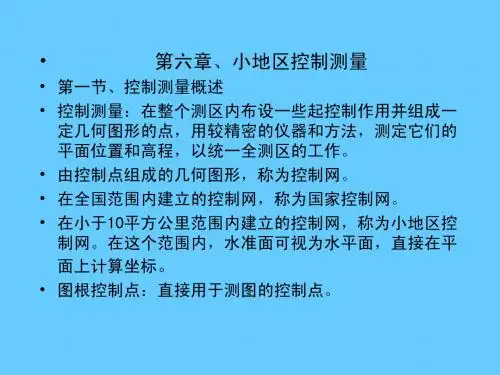
第六章 小地区控制测量
椭球面上的测量计算
主要介绍:地球椭球的基本几何参数及相互关系,椭球面上的常用坐标系及其相互关系,椭球面上的几种曲率半径,椭球面上的弧长计算,大地线,将地面观测的方向值归算到椭球面,将地面观测的长度归算到椭球面,椭球面上三角形的解算,大地主题解算的高斯平均引数公式
一、地球椭球的基本几何参数及相互关系
(一)、五个基本几何参数
椭圆的长半轴: a
椭圆的短半轴: b
椭圆的扁率:
a b a
α-=
椭圆的第一偏心率:
e b
'= 椭圆的第二偏心率:
e =
注 意
决定旋转椭球的形状和大小,只需知道五个参数中的两个就够了,但其中至少要有一个长度元素(如a 或b )。
为简化书写,常引入以下符号和两个辅助函数:
2
222,tan ,cos a c t B e B b
η===' 22221sin ,1cos W e B V e B =-=-'
式中,W 第一基本纬度函数,V 第二基本纬度函数。
我国所采用的的1954年北京坐标系应用的是克拉索夫斯基椭球参数;以后采用的1980。
小地区控制测量1.绘制地形图和施工放样为什么要先建立控制网? (2)2.导线有哪几种布设形式?各在什么情况下采用? (2)3.选定导线点应注意哪些问题? (2)4.导线坐标计算时应满足哪些几何条件?闭合导线与附合导线在计算中有哪些异同点? (2)5.设有闭合导线1-2-3-4-5-1,其已知数据和观测数据如下表,试求各导线点的坐标。
(2)6.根据图中的已知数据及观测数据计算1、2、3点的坐标。
(5)7. 前方交会观测数据如图,已知,xA=1112.342m,yA=351.727m,xB=659.232m,yB=355.537m, (10)8.距离交会观测数据如图,已知,xA=1223.453m,yA=462.838m,xB=770.343m,yB=466.648m, (12)9.用三、四等水准测量建立高程控制网时,怎样观测、纪录与计算? (14)10.在什么情况下采用三角高程测量?如何观测、纪录与计算? (16)1.绘制地形图和施工放样为什么要先建立控制网?测绘工作应遵循先整体到局部,从高级到低级,先控制后碎步的原则。
有了控制网,就有了基准点,绘制地形图和施工放样根据控制网内的控制点进行测绘及放样。
2.导线有哪几种布设形式?各在什么情况下采用?导线测量形式有闭合导线、附合导线和支导线闭合导线:起讫于同一已知点的导线,多用于面积较宽阔的独立地区。
附合导线:在两个已知点之间布设导线,多用于带状地区及公路、铁路、水利等工程的勘测与施工。
支导线:一个已知点及方向,布置导线。
点数不宜超过 2 个,一般仅作补点使用。
3.选定导线点应注意哪些问题?选点原则:既要便于导线本身的测量,又要便于测量碎部,并应保证各项技术要求得到满足。
相邻点间通视好,便于测角、测距点位土质坚硬,便于安放仪器、保存标志。
便于测绘地形和地物导线的边长应大致相等,一般为50-400m导线点应选在便于观测和不易被破坏的地方。
导线点有足够密度,分布均匀,便于控制整个测区。
第七章控制测量7.1试题7.1.1名词解释题(2)图根点 (3)图根控制测量 (4)大地点(5)导线(6)导线测量(7)坐标增量闭合差(8)三角高程测量 (9)高程闭合差(10)两差改正图根点:直接为测绘地形图而布设的控制点,作为测图的根据点。
图根控制测量:为测绘地形图而布设控制点进行的控制测量,一般有图根三角测量及图根导线测量两种。
大地点:国家基本控制网的各类控制点,包括三角点、导线点、水准点及GPS点。
导线:将测区内相邻控制点连成直线而构成的折线。
导线测量:在测区布设控制点成闭合多边形或折线形,测量导线边长及导线边所夹的水平角。
坐标增量闭合差:闭合导线所有坐标增量总和,理论上应为零,如不为零,其值即为坐标增量闭合差。
附合导线坐标增量闭合差是指坐标增量总和与已知两高级点之间坐标差的较差。
三角高程测量:在测站上通过观测目标的竖角,丈量仪器高及目标高,已知测站与目标间水平距,按三角学的原理,便可求得测站与目标的高差。
高程闭合差:测量得高差总和不等于理论值或不等于所附合的两已知点的高程之差。
7.1.2填空题(1)控制测量主要包括_平面_控制测量和_高程__控制测量;前者主要的方法有_三角测量__、_三边测量__、_边角测量__、_导线测量__等,后者主要方法有__水准测量_和_三角高程测量__。
(3)直接为测图服务而建立的控制测量称_图根_控制测量,它的精度比较低,边长短,一般可采用_小三角测量_、__测角交会_、__侧边交会__、导线测量_等方法进行。
(8)小地区平面控制网应视测区面积大小分级,建立测区的__首级控制__和___图根控制___。
(9)小地区控制网的控制点密度通常取决于_测图比例尺_和__地物地貌的复杂程度_。
(10)导线按形状可分为:①_闭合导线_;②__附和导线__;③___支导线___。
(11)闭合导线角度闭合差的分配原则是_平均分配角度闭合差,而符号相反。
如果不能平均分配,则可以对短边夹角和长、短边夹角给以较大的改正数。
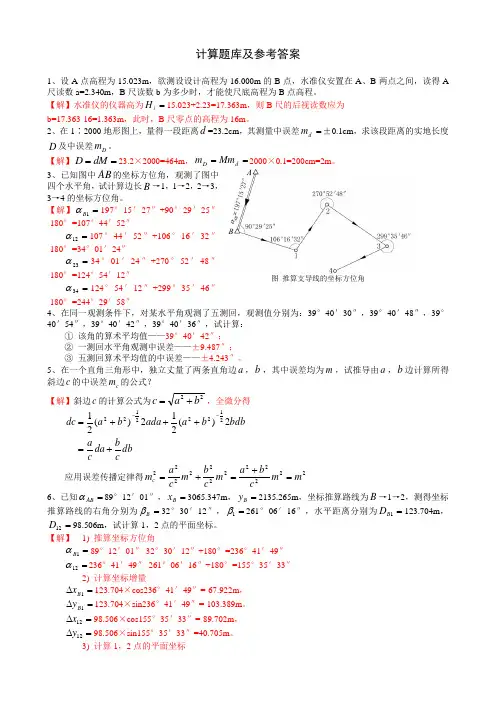
计算题库及参考答案1、设A 点高程为15.023m ,欲测设设计高程为16.000m 的B 点,水准仪安置在A 、B 两点之间,读得A 尺读数a=2.340m ,B 尺读数b 为多少时,才能使尺底高程为B 点高程。
【解】水准仪的仪器高为=i H 15.023+2.23=17.363m ,则B 尺的后视读数应为b=17.363-16=1.363m ,此时,B 尺零点的高程为16m 。
2、在1∶2000地形图上,量得一段距离d =23.2cm ,其测量中误差=d m ±0.1cm ,求该段距离的实地长度D 及中误差D m 。
【解】==dM D 23.2×2000=464m ,==d D Mm m 2000×0.1=200cm=2m 。
3、已知图中AB 的坐标方位角,观测了图中四个水平角,试计算边长B →1,1→2,2→3,3→4的坐标方位角。
【解】=1B α197°15′27″+90°29′25″-180°=107°44′52″=12α107°44′52″+106°16′32″-180°=34°01′24″=23α34°01′24″+270°52′48″-180°=124°54′12″=34α124°54′12″+299°35′46″-180°=244°29′58″4、在同一观测条件下,对某水平角观测了五测回,观测值分别为:39°40′30″,39°40′48″,39°40′54″,39°40′42″,39°40′36″,试计算:① 该角的算术平均值——39°40′42″; ② 一测回水平角观测中误差——±9.487″; ③ 五测回算术平均值的中误差——±4.243″。
建筑工程类_大比例尺地形图测绘题库1 . 已知一直线的象限角为 S15°W,则()为其坐标方位角。
A.15°B.75°C.165°D.195°答案:D2 . 衡量导线测量精度的指标是A.坐标增量闭合差B.导线全长闭合差C.导线全长相对闭合差D.高差闭合差答案:C3 . 导线测量的布设形式有A.一级导线、二级导线﹑图根导线B.单向导线﹑往返导线﹑多边形导线C.闭合导线﹑附合导线﹑支导线D.一级导线、二级导线﹑三级导线答案:C4 . 在水准测量过程中临时选定的立尺点,其上既有前视读数,又有后视读数,这些点称为A.水准点B.中间点C.转点D.待定点答案:C5 . 第Ⅱ象限直线,象限角R与方位角α的关系为A.R=180°-αB.R=αC.R=α-180°D.R=360°-α答案:A6 . 下列不属于平面控制测量的建立方法的是A.三角测量B.导线测量C.GPS测量D.水准测量答案:D7 . 导线测量角度闭合差的调整方法是A.反符号按角度个数平均分配B.反符号按角度大小比例分配C.反符号按边数平均分配D.反符号按边长比例分配答案:A8 . 在进行高差闭合差调整时,某一测段按测站数计算每站高差改正数的公式为A.V i=fh/N (N为测站数)B.V i=-fh/S(S为测段距离)C.V i=-fh/ND.V i=fh/S答案:C9 . 高程传递点的选取原则是()铅直。
A.图纸要求B.与距离无关C.任意选定D.贯通答案:C10 . 坐标方位角是以()为标准方向,顺时针转到测线的夹角。
A.真子午线方向B.磁子午线方向C.坐标纵轴方向D.正北方向答案:C11 . 有关水准测量注意事项中,下列说法错误的是A.仪器应尽可能安置在前后两水准尺的中间部位B.每次读数前均应精平C.记录错误时,应擦去重写D.测量数据不允许记录在草稿纸上答案:C12 . 已知 AB 两点的边长为 188.43m,方位角为146°07′06″,则 AB 的 x 坐标增量为A.-156.433mB.105.176mC.105.046mD.-156.345m答案:A13 . 设 AB 距离为 200.23m,方位角为121°23′36″,则 AB 的 x 坐标增量为( )m。
控制测量学试题六及参考答案一、名词解释:1、子午圈2、卯酉圈3、椭圆偏心率4、大地坐标系5、空间坐标系6、法截线7、相对法截线8、大地线9、垂线偏差改正10、标高差改正11、截面差改正12、起始方位角的归算13、勒让德尔定理14、大地元素15、地图投影16、高斯投影17、平面子午线收敛角18、方向改化19、长度比20、参心坐标系21、地心坐标系二、填空题:1、旋转椭球的形状和大小是由子午椭圆的个基本几何参数来决定的,它们分别是。
2、决定旋转椭球的形状和大小,只需知道个参数中的个参数就够了,但其中至少有一个。
3、传统大地测量利用天文大地测量和重力测量资料推算地球椭球的几何参数,我国1954年北京坐标系应用是椭球,1980年国家大地坐标系应用的是椭球,而全球定位系统(GPS)应用的是椭球。
4、两个互相垂直的法截弧的曲率半径,在微分几何中统称为主曲率半径,它们是指和。
5、椭球面上任意一点的平均曲率半径R等于该点和的几何平均值。
6、克莱洛定理(克莱洛方程)表达式为。
7、拉普拉斯方程的表达式为。
8、若球面三角形的各角减去,即可得到一个对应边相等的平面三角形。
9、投影变形一般分为、和变形。
10、地图投影中有、和投影等。
11、高斯投影是投影,保证了投影的的不变性,图形的性,以及在某点各方向上的的同一性。
12、采用分带投影,既限制了,又保证了在不同投影带中采用相同的简便公式进行由于引起的各项改正数的计算。
13、长度比只与点的有关,而与点的无关。
14、高斯—克吕格投影类中,当m0=1时,称为,当m0=0.9996时,称为。
15、写出工程测量中几种可能采用的直角坐标系名称(写出其中三种):、、。
16、所谓建立大地坐标系,就是指确定椭球的,以及。
17、参考椭球的定位和定向,就是依据一定的条件,将具有确定参数的椭球与确定下来。
18、参考椭球的定位和定向,应选择六个独立参数,即表示参考椭球定位的三个参数和表示参考椭球定向的三个参数。
东北大学测量学习题与答案小地区控制测量选择题1. 导线的布置形式有( )A.一级导线、二级导线﹑图根导线; B.单向导线﹑往返导线﹑多边形导线;C.闭合导线﹑附和导线﹑支导线 1. 导线测量的外业工作是( )A.选点﹑测角﹑量边; B.埋石﹑造标﹑绘草图; C.距离丈量﹑水准测量﹑角度测量3.导线角度闭合差的调整方法是将闭合差反符号后()。
A. 按角度大小成正比例分配;B. 按角度个数平均分配 ;C. 按边长成正比例分配4.导线坐标增量闭合差的调整方法是将闭合差反符号后()。
A. 按角度个数平均分配; B. 按导线边数平均分配; C. 按边长成正比例分配5.小三角测量的外业主要工作为()。
A. 角度测量;B. 基线丈量;C. 选点、测角、量基线 6.等高距是两相邻等高线之间的()。
A. 高程之差; B. 平距; C. 间距7.当视线倾斜进行视距测量时,水平距离的计算公式是()。
A. D=C K n +;B. D=αcos n KC. D=a Kn 2cos8.一组闭合的等高线是山丘还是盆地,可根据()来判断。
A. 助曲线; B. 首曲线; C. 高程注记9.在比例尺为1:2000,等高距为2m 的地形图上,如果按照指定坡度5 i %,从坡脚A 到坡顶B 来选择路线, 其通过相邻等高线时在图上的长度为() A. 10mm ; B. 20mm C. 25mm10.两不同高程的点,其坡度应为两点()之比,再乘以100%。
A.高差与其平距; B. 高差与其斜距; C.平距与其斜距11.视距测量时用望远镜内视距丝装置,根据几何光学原理同时测定两点间的()的方法。
A 距离和高差;B 水平距离和高差。
C 距离和高程判断题支导线由于没有检核条件,故只能用于图根控制。
( ) 2. 平面控制网的形式有导线控制网和三角控制网。
( ) 3. 导线的布设形式有闭合导线,附合导线,支导线三种。
( ) 4. 导线测量的外业工作包括踏勘选点及建立标志量边,测角和连测。
第六章小区域控制测量判断题三等水准测量中丝读数法的观测顺序为后、前、前、后。
()A. 正确B. 错误知识类别:6 难度系数:1; 答案:A-------------------------------------------------------------------------------------------导线测量的外业工作包括踏勘选点、角度测量、边长测量以及导线定向。
()A. 正确B. 错误知识类别:6 难度系数:1; 答案:A-------------------------------------------------------------------------------------------国家控制网按精度从低到高分为四个等级,依次为一等、二等、三等和四等。
()A. 正确B. 错误知识类别:6 难度系数:2; 答案:B-------------------------------------------------------------------------------------------在面积小于200㎞2范围内建立的控制网,称为小地区控制网。
()A. 正确B. 错误知识类别:6 难度系数:2; 答案:B-------------------------------------------------------------------------------------------导线的起算数据至少应有起算点的坐标和起算边的方位角,观测数据应有水平距离和水平角,导线计算的目的是求出未知点的平面坐标。
()A. 正确B. 错误知识类别:6 难度系数:1; 答案:A-------------------------------------------------------------------------------------------附合导线坐标增量闭合差的理论值为零。
1.如下图所示支导线,AB 为已知边,6381120'''︒=AB α,B 点坐标X B =,Y B = ,其它数据如图示,求C 点的坐标。
2.支导线A-B-C1-C2-C3-C4,如图6-47所示。
其中,A ,B 为坐标已知的点,C1~C4为待定点。
已知点坐标和导线的边长、角度观测值(左角)如图中所示。
试计算各待定导线点的坐标。
ABC1C2C3C42517.6022757.9152336.438188.34142.420150.344102.38082°03′52″212°32′01″201°40′46″137°03′35″图6-47 支导线计算练习题3.图6-47中的支导线,设其观测精度为:4,5''±=±=βm mm m D ,估算支导线端点的坐标中误差m x ,m y 和点位中误差M 。
4. 附合导线A-B-K1-K2-K3-C-D ,如图6-49所示。
其中A ,B ,C ,D 为坐标已知的点,K 1~K 3为待定点。
已知点坐标和导线的边长、角度观测值如图中所示。
试计算各待定导线点的坐标。
ABK1K2K3264°11′36″147°44′30″214°10′00″79°56′36″97°29′42″CDABCD1708.1171355.5841864.2221413.3501970.2201986.3852022.9421772.693αα297.260187.81293.400150.642图6-49 附合导线计算练习题5.图1所示设为四等单结点水准网,其中,A ,B ,C ,D 为已知高程的三等水准点,网中有4条线路汇集于结N ,在表7―28中计算结点N 的高程最或然值并评定其精度。
ACDA图6-55 单结点水准网计算练习题表1 单结点水准网结点高程平差计算6. 闭合导线A-B-J1-J2-J3-J4,如图6-48所示。
1.如下图所示支导线,AB 为已知边,6381120'''︒=AB α,B 点坐标X B =,Y B = ,其它数据如图示,求C 点的坐标。
2.支导线A-B-C1-C2-C3-C4,如图6-47所示。
其中,A ,B 为坐标已知的点,C1~C4为待定点。
已知点坐标和导线的边长、角度观测值(左角)如图中所示。
试计算各待定导线点的坐标。
A
B
C1
C2
C3
C4
2517.602
2757.915
2336.438188.34
0142.420
150
.344
1
02.38082°03′52″
212°32′01″
201°40′46″
137°03′35″
图6-47 支导线计算练习题
3.图6-47中的支导线,设其观测精度为:4,5''±=±=βm mm m D ,估算支导线端点的坐标中误差m x ,m y 和点位中误差M 。
4. 附合导线A-B-K1-K2-K3-C-D ,如图6-49所示。
其中A ,B ,C ,D 为坐标已知的点,K 1~K 3为待定点。
已知点坐标和导线的边长、角度观测值如图中所示。
试计算各待定导线点的坐标。
AB
K1
K2K3
264°11′36″
147°44′30″
214°10′00″
79°56′36″
97°29′42″
CD
A
B
C
D
1708.1171355.584
1864.222
1413.350
1970.2201986.385
2022.9421772.693αα297.
260
187.
812
93.4
00150.642
图6-49 附合导线计算练习题
5.图1所示设为四等单结点水准网,其中,A ,B ,C ,D 为已知高程的三等水准点,网中有4条线路汇集于结N ,在表7―28中计算结点N 的高程最或然值并评定其精度。
A
C
D
A
图6-55 单结点水准网计算练习题
表1 单结点水准网结点高程平差计算
6. 闭合导线A-B-J1-J2-J3-J4,如图6-48所示。
其中,A 和B 为坐标已知的点,J 1J 4为待定点。
已知点坐标和导线的边长、角度观测值如图中所示。
试计算各待定导线点的坐标。
J2
图6-48 闭合导线计算练习题
7.已知四边形闭合导线内角的观测值见表7,并且在表中计算(1)角度闭合差;(2)改正后角度值; (3)推算出各边的坐标方位角。
∑
=β =
β
f
8.从地形图上量得A 、B 两点得坐标和高程如下: A x = ,A y = ,HA=
B x =,B y =,HB=
试求:①AB 水平距离,②AB 边得坐标方位角,③AB 直线坡度。
简述测设步骤,并绘略图表示。
9.如图4-28,A 、B 为控制点,已知:
B x =,B y =, AB D =, BA α=1560
0213'''
待测设点P 的坐标为
p
x =,
p
y =
图4-28
若采用极坐标法测设P 点,试计算测设数据,简述测设过程,并绘注测设示意图。
10.写出施坐标与测图坐标相互换算的公式。
如图4-31,已知施工坐标系原点O '的测图坐标为:o x ' =,o y '=,
两坐标纵轴之间的夹角α=220
0000''',控制点A 在测图坐标为x=,y=,试计算A 点的施工坐标x '和y '。
11.假设测设一字形的建筑基线C B A '''三点已测设于地面,经检查C B A ''=1790
2495''',已知B A ''=200m ,
C B ''=120m ,试求各点移动量 值,并绘图说明如何改正使三点成一直线。
图4-31。