水下无人航行器原理张志强编写
- 格式:docx
- 大小:17.42 KB
- 文档页数:3

基于btt控制的无人水下航行器动力学模型1. 简介无人水下航行器是一种可以在水下环境中自主航行的机器人。
为了实现精确的控制和导航,需要建立准确的动力学模型。
本文将介绍基于btt(背推头)控制的无人水下航行器动力学模型。
2. 动力学模型2.1 水下航行器结构水下航行器通常由机体、推进装置和控制系统组成。
机体是整个水下航行器的主体,包括浮力装置、外壳和传感器等。
推进装置用于提供推进力,常见的有螺旋桨和喷射式推进器。
控制系统负责接收指令并控制航行器进行相应动作。
2.2 btt控制原理btt(背推头)控制是一种常用的姿态控制方法,在水下航行中具有广泛应用。
其原理是通过调整推进装置产生的推进力矩来实现姿态调整。
在btt控制中,通过改变螺旋桨或喷射式推进器的转速来改变推进力的方向和大小。
当推进力矩与航行器的姿态矩平衡时,航行器可以保持稳定的姿态。
2.3 动力学方程为了建立水下航行器的动力学模型,需要考虑以下因素:质量、浮力、推进力和阻力。
2.3.1 质量水下航行器的质量可以表示为:m=m机体+m推进装置+m控制系统2.3.2 浮力水下航行器在水中受到浮力的作用,浮力可以表示为:F b=ρ⋅g⋅V其中,ρ是水的密度,g是重力加速度,V是水下航行器的体积。
2.3.3 推进力推进装置产生的推进力可以表示为:F p=k p⋅n2其中,k p是推进装置的系数,n是转速。
2.3.4 阻力水下航行器在水中受到阻力的作用,阻力可以表示为:F r=k r⋅n2其中,k r是阻力系数。
根据牛顿第二定律,可以得到水下航行器的动力学方程:m⋅a=F p−F r−F b2.4 控制系统设计为了实现btt控制,需要设计合适的控制系统。
控制系统主要包括姿态传感器、控制器和执行器。
姿态传感器用于测量水下航行器的姿态,常见的有陀螺仪和加速度计。
控制器根据姿态传感器的数据计算出相应的控制指令。
执行器根据控制指令调整推进装置产生的推进力矩。
3. 实验与仿真为了验证动力学模型和btt控制方法的有效性,可以进行实验和仿真。
无人潜航器工作原理
嘿,朋友们!今天咱来聊聊无人潜航器这神奇的玩意儿。
你说它就像个水下的小探险家,在那深深的海洋里自由自在地穿梭。
无人潜航器啊,其实就好比是一辆水下的小汽车。
它有自己的动力系统,能带着它在水里跑起来。
这动力系统就像是汽车的发动机,让它能往前冲。
那它靠啥知道往哪儿走呢?嘿嘿,就靠各种传感器和控制系统呀,就跟人有眼睛和大脑一样,能判断方向,避开障碍。
它还能做很多事情呢!比如说去探测海底的地形,哎呀呀,就好像是在给海底画地图一样。
它还能去观察那些奇妙的海洋生物,就像是我们去动物园看动物似的,只不过它是在水下看呢。
你想想,那么深的海底,要是让人下去多麻烦呀,还危险呢。
可无人潜航器就不怕呀,它可以轻轻松松地就下去了,把看到的、听到的都给咱带回来。
这多厉害呀!
它的身体里面还有各种高科技的设备呢,就像一个小小的实验室。
能检测水质呀,看看有没有污染啥的。
这要是没有它,咱咋能知道海底的情况呢?
而且呀,无人潜航器还能帮咱找宝藏呢!说不定在哪个角落里就藏着啥宝贝等着它去发现。
这是不是很神奇呀?
它在水下工作的时候,可安静了,就像个小幽灵一样。
悄悄地就把任务完成了。
它也不用休息,不用吃饭,一直工作都没问题。
你说这无人潜航器是不是很了不起呀?它就像是我们人类派到水下的小使者,帮我们探索那神秘的海洋世界。
咱可得好好珍惜它,让它为我们发挥更大的作用呀!反正我是觉得它真的太神奇了,太有用了!你们觉得呢?
原创不易,请尊重原创,谢谢!。
自主水下航行器事件触发自适应神经渐近深度跟踪控制自主水下航行器(AUV)是一类无人驾驶的水下机器人,广泛应用于海洋探索、海洋科学研究、油田勘探和水下作业等领域。
而对于AUV来说,确保安全、精准的深度控制是非常重要的任务之一。
在实际应用过程中,AUV会遭遇到各种不同的环境和操作条件,如海流、洋流、风浪等,这些因素都会对深度控制产生影响。
因此,设计一种自适应神经渐近深度跟踪控制算法,以应对各种复杂环境的要求,成为研究的热点之一。
自适应神经渐近深度跟踪控制算法(AA-NADTC)是一种结合了自适应控制和神经网络的深度控制方法。
该算法可以根据AUV所处的环境和操作条件,实时调整控制参数,以实现对目标深度的准确跟踪。
下面将针对该算法的关键要素进行详细介绍。
首先是自适应控制。
自适应控制是指控制器可以根据系统的变化自动调整其参数,以实现对系统动态特性的适应。
在AA-NADTC算法中,自适应控制通过对深度控制过程中的系统参数进行实时更新,使得控制器能够根据环境和操作条件的变化进行调整,从而提高深度控制的准确性和稳定性。
其次是神经网络。
神经网络是一种模仿人脑神经元网络结构和工作机制的计算模型,具有较强的非线性逼近能力和自适应学习能力。
在AA-NADTC算法中,神经网络被用来建模和逼近AUV的深度控制系统,通过学习和优化,不断提高控制器的性能。
通过将神经网络模型与自适应控制相结合,AA-NADTC算法能够在各种复杂的水下环境中实现精准的深度控制。
此外,AA-NADTC算法还采用了渐近控制策略。
渐近控制是指控制器可以在有限时间内将系统的状态逐渐稳定到目标状态。
在AA-NADTC算法中,通过对深度控制误差的分析和处理,以及对控制器参数的调整,实现了对目标深度的渐近跟踪。
这种渐近控制策略使得AA-NADTC算法能够在系统达到稳定状态时,保持稳定的深度控制性能。
总之,自主水下航行器事件触发自适应神经渐近深度跟踪控制(AA-NADTC)是一种应对各种复杂水下环境的深度控制方法。
水下无人航行器的协同路径规划2青岛军械技术保障大队山东省青岛市 266000摘要:无人水下航行器作为探索海洋的关键设备,已经广泛用于完成水下搜救、勘测及海洋生物监测等军事和民用领域任务。
介绍了水下无人航行器的协同路径规划的编队控制、协同路径规划及环境信息感知。
关键词:水下无人航行器;路径规划;环境信息感知;引言无人自主水下航行器(UUV)的协同控制作为海洋开发和多机器人系统之间的交叉领域, 近几十年来越来越受到研究人员和工程师的关注。
目前, UUV协同控制理论体系尚处于构建之中, 相关研究正面临诸多亟待解决的难题。
文中对多UUV 协同控制问题中的编队控制、协同路径规划、环境感知等进行了全面调研。
最后讨论了未来可能研究的相关方向, 为在复杂的海洋应用场景中合理利用UUV来完成各种水下任务提供相关参考。
1编队控制编队的目的是控制UUV的相对位置、速度和方向, 以便在群体移动的同时执行任务。
为了实现编队控制, UUV之间需要通过无线或水声通信交换一些关键信息。
UUV编队的架构可以分为集中式架构和分散式架构。
分散式架构包括分布式架构和分层式架构, 其主要区别在于决策过程, 可看作是动作选择的过程。
在集中式架构中, 1个中央控制器可以获得UUV和环境的全局信息(例如UUV位置、速度以及障碍位置等), 这些信息由UUV携带传感器进行收集。
为了使多UUV保持预定的编队队形避开障碍物并到达目的地, 需要1个集中式控制器对全局信息进行处理并决策。
进而,集中控制器会向每个UUV发送命令信号, 而每个UUV将其状态信息作为反馈发送给集中控制器(例如, 领导者UUV)。
集中式架构的主要优点是易于实现, 但其缺点包括: 对于控制器故障的鲁棒性较弱; 需要高带宽的通信环境, 通信资源消耗大。
在分布式架构中, UUV之间可以交换环境和UUV状态信息。
为了实现分布式控制, 每个UUV需要与整群的1个子集UUV共享其信息。
每个UUV都有1个控制器, 可以基于UUV群的局部信息进行独立决策。
无人机在水下行驶的原理无人机在水下行驶的原理可以简单描述为:通过电气驱动装置和操纵系统控制动力装置产生推力、舵机调整姿态以及水声、光电、磁电等传感器收集数据,并通过通信系统将数据传回操作员端的一种技术手段。
实现无人机在水下行驶的原理主要包括船体设计、推进系统、动力系统、操纵系统以及传感器和通信系统等方面。
首先,船体设计是实现无人机在水下行驶的关键。
船体应具备良好的流线型设计,以减小水下行驶时的水阻力;同时船体应具备良好的稳定性和操控性,可以适应不同的水下环境。
其次,推进系统是无人机在水下行驶的核心之一。
常见的推进系统包括螺旋桨推进系统和喷水推进系统。
螺旋桨推进系统通过电动机驱动螺旋桨产生推力,使无人机能够在水下前进、后退、转向等。
喷水推进系统通过水泵将水吸入,再通过喷嘴喷射出去,产生推力来推动无人机,同样能实现水下的运动。
再次,动力系统为无人机提供所需的电能,驱动推进系统和其他电子设备的正常运行。
动力系统主要由电池组成,可以是锂电池、氢燃料电池等。
电池的选用要根据无人机的工作时间和负载量来确定,同时要保证电池的能量密度和安全性。
然后,操纵系统是控制无人机运动的重要部分,其通过电子控制器与推进系统相连,接受操作员的指令,并对推进系统的输出进行精确的调整,使无人机能够保持平衡和稳定的姿态。
操纵系统还需要具备一定的自主避障和自动驾驶功能,以提高无人机在水下的自主性和应对复杂环境的能力。
最后,传感器和通信系统也是无人机在水下行驶的重要组成部分。
水下环境复杂多变,传感器系统可以通过水声、光电、磁电等方式感知周围环境,收集海洋水质、水温、盐度、水流等数据。
通信系统则用于将收集到的数据传输给地面的操作员,以实现远程监控和数据分析。
总之,无人机在水下行驶的原理是通过船体设计、推进系统、动力系统、操纵系统以及传感器和通信系统的协同作用,实现无人机在水下的运动和数据采集。
未来,随着技术的不断发展,无人机在水下的应用将会更加广泛。
水下无人航行器原理一、水下无人航行器简介水下无人航行器是一种能够在水下进行探测、观测、搜寻等任务的自主无人机器人。
它采用先进的技术和设计,具备在水下自由、高效地运行的能力。
本文将详细介绍水下无人航行器的原理以及其在不同领域中的应用。
二、水下无人航行器原理水下无人航行器的运行原理主要包括以下几个方面:1. 水下航行机构水下无人航行器通常采用推进器作为主要的航行机构。
推进器可以是螺旋桨、喷水推进器或者推进电机等。
通过调节推进器的速度和方向,可以实现水下无人航行器的前进、后退、转向等动作。
2. 航行控制系统水下无人航行器配备了精密的航行控制系统,包括陀螺仪、加速度计、罗盘等传感器,以及控制器和执行机构。
这些设备可以实时感知水下环境的姿态和动态信息,并根据预设的任务要求进行相应的控制和调整。
3. 通信系统水下无人航行器需要与地面指挥中心或其他装置进行通信,以传输控制指令、接收任务信息等。
为了在水下具备可靠的通信能力,通常采用声学通信技术,通过水中传播声波实现信息的传递。
4. 电力供应系统水下无人航行器需要稳定的电力供应,以支持其各项功能的正常运行。
典型的方案是采用蓄电池作为主要的电源装置,并结合高效能的节能技术,延长电池的使用寿命。
5. 传感器系统水下无人航行器配备了多种传感器,用于探测水下环境的各项参数,如水温、盐度、深度、水流速度、水质等。
这些数据可以提供给地面指挥中心,帮助进行环境评估、搜寻目标等任务。
三、水下无人航行器的应用领域水下无人航行器在各个领域中都有广泛的应用,以下列举了几个常见的应用领域:1. 海洋科学研究水下无人航行器能够进行海底地形测量、海洋观测、海洋生物资源调查等工作,为海洋科学研究提供重要的数据和支持。
2. 海洋资源勘探水下无人航行器可以进行海底矿产的勘探和开发,有效提高资源勘探的效率和准确性。
3. 海洋环境监测水下无人航行器可以实时监测海洋环境的变化,对海洋污染、水质变化等问题进行及时响应和处理。
多学科设计优化方法在水下无人航行器中应用
张磊;胡震
【期刊名称】《哈尔滨工程大学学报》
【年(卷),期】2024(45)1
【摘要】为了提高水下无人航行器工作的可靠性和稳健性,本文采用多学科设计优化方法开展航行器的总体设计优化。
首先开展水下航行器在总体设计阶段的学科设计,分析了各学科内部的模型和计算方法,明确了各学科输入、输出和耦合关系;开展了学科内参数建模,确立了总体设计的设计变量、系统参数和约束条件。
然后以航行器质量最轻和机动性能最强为优化目标,获得设计变量计算最优解和优化设计主要输出结果值。
设计变量优化计算值有效提高设计方案满足约束的能力,优化设计主要输出结果为水下无人航行器设计方案的选择提供了定量依据。
【总页数】9页(P144-152)
【作者】张磊;胡震
【作者单位】中国船舶科学研究中心;深海技术科学太湖实验室
【正文语种】中文
【中图分类】U662.3
【相关文献】
1.新型铝水燃烧无人水下航行器混合动力系统优化设计
2.圆柱形水下航行器多学科优化设计方法研究
3.多学科设计优化方法及其在水下航行器设计中的应用
4.微小
型水下航行体多学科稳健设计优化方法5.四旋翼无人水下航行器外形减阻优化设计仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
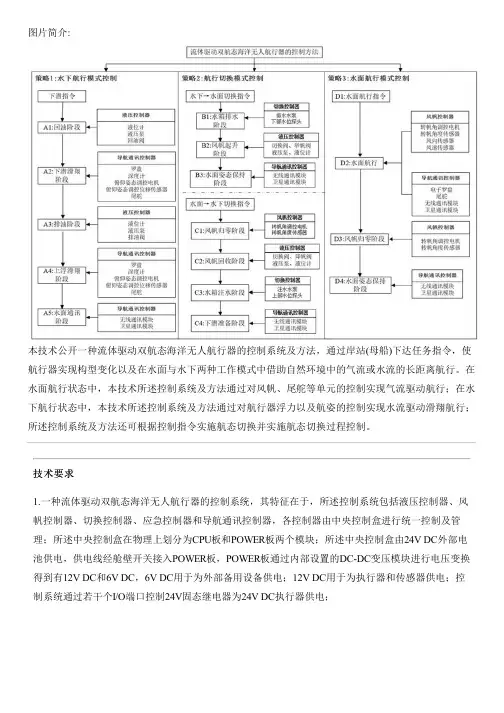
图片简介:本技术公开一种流体驱动双航态海洋无人航行器的控制系统及方法,通过岸站(母船)下达任务指令,使航行器实现构型变化以及在水面与水下两种工作模式中借助自然环境中的气流或水流的长距离航行。
在水面航行状态中,本技术所述控制系统及方法通过对风帆、尾舵等单元的控制实现气流驱动航行;在水下航行状态中,本技术所述控制系统及方法通过对航行器浮力以及航姿的控制实现水流驱动滑翔航行;所述控制系统及方法还可根据控制指令实施航态切换并实施航态切换过程控制。
技术要求1.一种流体驱动双航态海洋无人航行器的控制系统,其特征在于,所述控制系统包括液压控制器、风帆控制器、切换控制器、应急控制器和导航通讯控制器,各控制器由中央控制盒进行统一控制及管理;所述中央控制盒在物理上划分为CPU板和POWER板两个模块;所述中央控制盒由24V DC外部电池供电,供电线经舱壁开关接入POWER板,POWER板通过内部设置的DC-DC变压模块进行电压变换得到有12V DC和6V DC,6V DC用于为外部备用设备供电;12V DC用于为执行器和传感器供电;控制系统通过若干个I/O端口控制24V固态继电器为24V DC执行器供电;所述CPU板上布置有嵌入式微处理器、数字电路和模拟电路,所述CPU板通过DC-DC变压模块将POW板的6V DC变换得到3.3V DC为数字电路供电;CPU板通过DC-DC变压模块将POW板的6V DC变换得到5V DC为CPU板内集成的传感器及模拟电路供电;CPU板通过流保护模块和DC-DC变压模块输出5V DC为外部5V DC传感器供电。
2.根据权利要求1所述的一种流体驱动双航态海洋无人航行器的控制系统,其特征在于,控制系统基于ARM CortexTM-M3内核的STM32F1系列32位嵌入式微处理器设计,具有9路全双工串行数字通讯接口、8路通过SPI总线扩展的16位A/D通道以及14路24V固态继电器;在数据存储方面控制系统采用Nor Flash+Nand Flash形式,用Nor Flash存储控制参数和规划航线,用Nand Flash存储任务数据,Nor Flash 和Nand Flash均采用双余度方案,两个余度同时存储备份;Nor Flash采用2片16Mbits的工业级芯片,Nand Flash采用2片4GByte的工业级芯片,为任务数据存储预留空间。
基于STM32单片机的无人水下航行器设计
宋林;吴尹红
【期刊名称】《无线互联科技》
【年(卷),期】2022(19)19
【摘要】文章以实际应用为出发点,设计了运用于江河湖泊水底探索工作的无人水下航行器。
无人水下航行器动作姿态主要参考四翼无人机飞行原理,以
STM32F446RET6单片机为控制核心,其自身姿态调节控制主要依靠MPU6050芯片。
同时,MPU6050也起着计算位置,测量速度,检查自身四翼是否损坏的任务。
本设计通过MS5803压力传感器进行深度与温度数据采集,最终通过LoRa模块将数据返回给上位机。
【总页数】4页(P59-61)
【作者】宋林;吴尹红
【作者单位】攀枝花学院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于反演设计的无人水下航行器自适应二阶滑模控制
2.基于海洋能的无人水下航行器能源发电装置设计
3.基于倾斜转弯技术的无人水下航行器双回路自动驾驶仪设计方法
4.基于Modbus/TCP协议的无人水下航行器监控系统设计
5.基于MSP430的遥控无人水下航行器控制系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM自主式水下机器人系统设计为了解决自主式水下机器人智能控制问题,设计了一种自主式水下机器人。
文章从系统设计方面介绍了自主式水下机器人,利用PID控制算法对水下机器人运动控制进行了试验研究。
PID算法对自主式水下机器人进行回路控制,实现对水下机器人航向角度进行控制,从而提高稳定性能。
通过研究自主式水下机器人及其控制系统能够实现水下机器人对目标进行锁定进行观测,优化了自主式水下机器人的工作性能和指标。
标签:自主式水下机器人;PID控制算法;系统结构,运动控制;控制器Abstract:In order to solve the intelligent control problem of autonomous underwater vehicle (AUV),an autonomous underwater vehicle (AUV)is designed. In this paper,the autonomous underwater vehicle is introduced from the aspect of system design,and the experimental study on the motion control of the underwater vehicle is carried out using the PID control algorithm. PID algorithm controls the autonomous underwater vehicle loop,to achieve the control of its heading angle,so as to improve the stability performance. Through the research of autonomous underwater vehicle and its control system,it can get the underwater vehicle to lock and observe the target,and optimize the working performance and index of the autonomous underwater vehicle.Keywords:autonomous underwater vehicle;PID control algorithm;system structure;motion control;controller引言作为一种水下无人航行器的自主式水下机器人(Autonomous Underwater Vehicle,AUV),在21世纪军用和海洋开发等领域拥有广泛的应用前景和发展趋势,已成为向深海领域发展研究的一個大热点,特别是自主式水下机器人核心技术之一的控制体系结构设计已成为其实现水下自主作业探索海洋的关键。
自动控制系统在水下无人机中的应用自动控制系统在水下无人机中的应用正日益受到人们的关注。
随着科技的不断发展,水下无人机作为一种重要的探测工具,正在被广泛应用于海洋勘探、水下资源开发以及环境保护等领域。
其成功应用的背后离不开自动控制系统的运作。
一、水下无人机的发展背景水下无人机是一种可以在水下环境下自主进行任务的机器人。
它的出现解决了传统水下勘探的许多难题,大大提高了工作效率和安全性。
随着对海洋资源的需求不断增加,水下无人机的需求也日益增长。
二、水下无人机的工作原理水下无人机通过自动控制系统来实现自主飞行及任务完成。
它由传感器、控制器和执行机构组成。
传感器负责收集周围环境的信息,控制器根据这些信息制定相应的任务策略,执行机构则负责执行任务。
这样的自动控制系统确保了水下无人机的灵活性和高效性。
三、水下无人机的应用领域1. 海洋勘探:水下无人机可以携带各种传感器,对海洋地质、地形等进行精确测量,为资源开发和环境保护提供重要数据支持。
2. 水下资源开发:水下无人机可用于深海油气田的维护与作业,通过自主潜入水下进行各项任务,提高作业效率并降低风险。
3. 海洋环境监测:水下无人机可以应用于水质监测、浮游生物调查等工作,为海洋生态保护和海洋污染治理提供数据支持。
4. 海洋考古:水下无人机可以潜入水下进行考古勘探和文物保护,帮助人类了解海洋的历史和文化。
四、水下无人机自动控制系统的优势1. 提高工作效率:水下无人机能够高效地执行任务,减少人力资源的消耗,提高工作效率。
2. 降低风险:自动控制系统使得水下无人机能够在复杂环境下进行工作,减少人员受伤或损失的风险。
3. 数据准确性:水下无人机搭载的传感器具备高精度测量能力,能够准确地收集和记录相关数据。
五、水下无人机自动控制系统面临的挑战1. 自主导航:水下环境中的水流、水压等因素会对水下无人机的控制与导航造成影响,需要解决自主导航的技术难题。
2. 通信延迟:在水下通信面临很大的挑战,需要开发更高效的通信系统来保持与水上指挥中心的实时联系。
专利名称:水下无人自主航行器专利类型:发明专利
发明人:陈建峰,王英,徐珂,魏芳申请号:CN201910636722.9申请日:20190715
公开号:CN110341917A
公开日:
20191018
专利内容由知识产权出版社提供
摘要:本发明涉及水下无人自主航行器,包括航行器本体和岸上操作终端,航行器本体包括独立密封并组装一体的头段、中段、尾段和至少一个智能控制器;智能控制器包括一个独立供电、可与所述岸上操作终端无线连接的成品移动通信终端,移动通信终端设置在水密壳体内;智能控制器所集成的功能模块包括电池、显示屏、WIFI通信单元、无线移动通信单元、卫星定位单元、姿态传感器、电子罗盘、存储模块、计算单元、视频单元和音频单元;在头段壳体、中段壳体或尾段壳体及水密壳体内设置有若干传感器;本发明装置利用高集成度的商品化智能移动通信终端,高度集成了包括水下无人自主航行器所需的绝大部分传感器和通信单元,其集成度高、价格低、易于模块化。
申请人:浙江海呐科技有限公司
地址:316000 浙江省舟山市定海区临城街道百川道11号舟山海洋科学城A区
国籍:CN
代理机构:西安新思维专利商标事务所有限公司
代理人:黄秦芳
更多信息请下载全文后查看。
收稿日期:2020-01-09修回日期:2020-03-09基金项目:国家自然科学基金资助项目(51307178)作者简介:侯新国(1972-),男,湖北武汉人,博士,副教授。
研究方向:信号检测与处理。
*摘要:针对自主水下航行器(AUV )编队式航行中存在智能体间相互碰撞的危险,提出一种自主水下航行器的无碰协调控制技术,包含了编队协调控制和无碰策略等多种基本行为的融合。
在编队控制中运用基于级联方法的路径跟踪控制技术和参数一致性的协同控制方法,保证了跟踪误差的渐近稳定,采用HRVO 算法的无碰避障策略,使得AUV 可以同时避开一般障碍物和其他AUV 的碰撞危险。
仿真结果表明,该AUV 编队式无碰协调控制技术可使各AUV 在避开碰撞危险的情况下,快速收敛到各自的参考路径,并保持编队的协调一致性。
关键词:自主水下航行器,编队控制,路径跟踪,障碍物躲避中图分类号:TM 921.5文献标识码:ADOI :10.3969/j.issn.1002-0640.2021.03.006引用格式:侯新国,潘昕,毕敏.编队式自主水下航行器无碰协调控制技术研究[J ].火力与指挥控制,2021,46(3):32-37.编队式自主水下航行器无碰协调控制技术研究*侯新国1,潘昕1,毕敏2(1.海军工程大学电气工程学院,武汉430033;2.湖北宜昌测试技术研究所,湖北宜昌443000)Research on Coordinated Control of Formation AutonomousUnderwater Vehicles Without CollisionHOU Xin-guo 1,PAN Xin 1,BI Min 2(1.Naval University of Engineering ,Institutionof Electrical Engineering ,Wuhan 430033,China ;2.Yichang Testing Technique R&D Instiute ,Yichang 443000,China )Abstract :In view of the risk of collision among intelligent bodies in autonomous underwatervehicles (AUVs )formation navigation ,a non -collision and coordination control technology of autonomous underwater vehicle is proposed in this paper ,which includes the integration of various basic behaviors such as formation coordination control and non -collision strategy.In it ,the path tracking control technology based on cascade method and the coordination control method of parameter consistency are used to ensure the asymptotical stability of tracking error ,and the collision avoidance strategy of HRVO algorithm is adopted ,so that AUVs can avoid the collision risk of common obstaclesand other AUVs simultaneously.The simulation results show that the AUV formation with non-collision and coordination control technology can quickly converge to the respective reference paths and maintain the coordination of formation in the case of avoiding collision risk.Key words :autonomous underwater vehicles ,formation control ,path tracking ,obstacle avoidance Citation format :HOU X G ,PAN X ,BI M.Research on coordinated control of formation autonomous underwater vehicles without collision [J ].Fire Control &Command Control ,2021,46(3):32-37.0引言编队式自主水下航行器(AUV )具有作业效率高、功能全面的优势[1],在海洋勘探、预警搜索侦察等方面有重大的应用价值。
水下无人航行器原理张志强编写
【实用版】
目录
一、水下无人航行器的概述
二、水下无人航行器的工作原理
三、水下无人航行器的关键技术
四、水下无人航行器的应用前景
正文
一、水下无人航行器的概述
水下无人航行器(Underwater Unmanned Vehicle,简称 UUV)是一种在水下执行任务的无人驾驶航行器。
与空中无人机类似,水下无人航行器也具有自主航行、自主控制和自主完成任务的能力,但其运行环境为水下。
作为一种新型的水下探测与监测手段,水下无人航行器在海洋科学研究、资源勘探、军事侦察等领域具有广泛的应用前景。
二、水下无人航行器的工作原理
水下无人航行器的工作原理主要包括以下几个方面:
1.动力系统:水下无人航行器通常采用电动推进器作为动力来源。
电动推进器通过电池组提供能量,将电能转化为机械能,推动航行器前进。
2.导航与控制:水下无人航行器需要具备精确的导航和控制能力。
一般采用惯性导航、声纳导航、视觉导航等多种导航技术相结合,实现航行器的精确定位和自主导航。
同时,通过遥控、自主控制等方式,实现航行器的姿态调整和避障等功能。
3.通信系统:水下无人航行器需要与地面控制设备或其他水下设备进行实时数据传输和指令接收。
通信系统通常采用有线或无线方式,如光纤通信、声纳通信、水声通信等。
4.传感器系统:水下无人航行器配备了各种传感器,如声纳、摄像头、激光测距仪等,用于获取水下环境信息,实现自主避障、目标识别等功能。
三、水下无人航行器的关键技术
水下无人航行器的关键技术主要包括以下几个方面:
1.水下导航与定位技术:由于水下环境复杂,航行器需要具备高精度的导航与定位能力。
因此,水下无人航行器通常采用多种导航技术相结合,如惯性导航、声纳导航、视觉导航等。
2.水下通信技术:水下通信受到水体吸收和衰减的影响,通常采用声纳通信、水声通信等方式。
如何实现高速、高效、稳定的水下通信,是水下无人航行器的一个重要研究方向。
3.水下能源系统:水下无人航行器的续航能力受限于电池组的容量和寿命。
因此,研究高能量密度、长寿命的水下能源系统,是提高水下无人航行器性能的关键。
4.水下自主控制技术:水下无人航行器需要在复杂的水下环境中实现自主避障、目标识别等功能。
因此,研究水下自主控制算法,提高航行器的智能水平,是水下无人航行器的重要研究方向。
四、水下无人航行器的应用前景
水下无人航行器在多个领域具有广泛的应用前景:
1.海洋科学研究:水下无人航行器可应用于海洋生物、海底地形、海洋环境等方面的调查与监测,提高海洋科学研究的效率和质量。
2.资源勘探:水下无人航行器可用于海底矿产、油气资源等的勘探与开发,降低勘探成本,提高勘探效果。
3.军事侦察:水下无人航行器可应用于水下战场侦察、目标定位、水雷探测等军事领域,提高军事行动的效能和安全性。
4.灾难救援:水下无人航行器可在水下灾难事故中进行人员搜救、水
质监测等任务,提高救援效率和准确性。
总之,水下无人航行器作为一种新型的水下探测与监测手段,具有广泛的应用前景和重要的研究价值。