钢板翻转机
- 格式:doc
- 大小:836.00 KB
- 文档页数:11
翻转机操作规程1. 引言翻转机是一种用于将物体翻转或倾斜的机械设备,常被应用于物流、生产流程中的物品转运和位置调整工作。
为了确保操作人员的安全和设备的正常运行,制定本操作规程。
2. 设备介绍翻转机是由主机支架、翻转装置、控制系统和安全保护装置组成。
2.1 主机支架主机支架是翻转机的基础结构,用于支撑整个设备的重量,并提供稳定的工作环境。
2.2 翻转装置翻转装置包括翻转平台、卷筒、铰链、液压缸等部件,用于实现物体的翻转或倾斜。
2.3 控制系统控制系统由控制器、按钮和传感器等组成,用于控制翻转机的启停、转动方向和角度。
2.4 安全保护装置安全保护装置包括紧急停机按钮、安全传感器和防护罩等,用于保障操作人员的安全。
3. 操作流程操作翻转机的步骤如下:3.1 准备工作1.检查翻转机的工作环境是否清洁、整洁,无杂物堆放。
2.检查翻转机的各个部件和连接处是否紧固可靠。
3.确认翻转机的电源已接通,控制系统正常供电。
3.2 安全操作1.戴好防护手套和安全帽等个人防护装备。
2.确保周围没有人员和障碍物,确保操作空间安全。
3.检查安全保护装置是否正常工作,如紧急停机按钮、防护罩是否完好。
4.在操作前,确保翻转机处于静止状态。
3.3 操作步骤1.打开控制器的电源开关。
2.按下启动按钮,翻转机进入工作状态。
3.通过控制器上的按钮或摇杆控制翻转机的转动方向和速度。
4.翻转完成后,按下停止按钮,翻转机停止工作。
5.关闭控制器的电源开关。
3.4 安全措施1.在操作过程中,严禁将手部或其他身体部位靠近翻转机的转动部件。
2.遇到紧急情况,立即按下紧急停机按钮,切断电源。
3.定期检查翻转机的各个部件和安全保护装置,如有故障及时维修或更换。
4.操作完毕后,将翻转机归位,并清理工作环境。
4. 操作注意事项在使用翻转机进行工作时,还需注意以下事项:1.翻转机的使用范围和额定工作负荷,不得超过其设计要求。
2.遵守使用手册中关于维护和保养的要求,定期检查和保养设备。
翻板装置中各数据计算一、双臂曲柄摇杆式翻板机设计1.1 概述翻板机是中厚板车间精整工段不可缺少的辅助设备之一。
其作用是将钢板翻转 180°,用来检查钢板上、下表面的质量。
本次钢坯火焰清理机设计中,对钢板上、下 两表面进行清理,采用的翻板机构为双臂曲柄摇杆式翻板机构。
双臂曲柄摇杆式翻板机 由电机、减速机、曲柄连杆机构组成。
电机、减速机提供低速大扭矩的动力,由两个曲 柄连杆机构分别带动翻板臂和接板臂的旋转,从而实现翻板的动作。
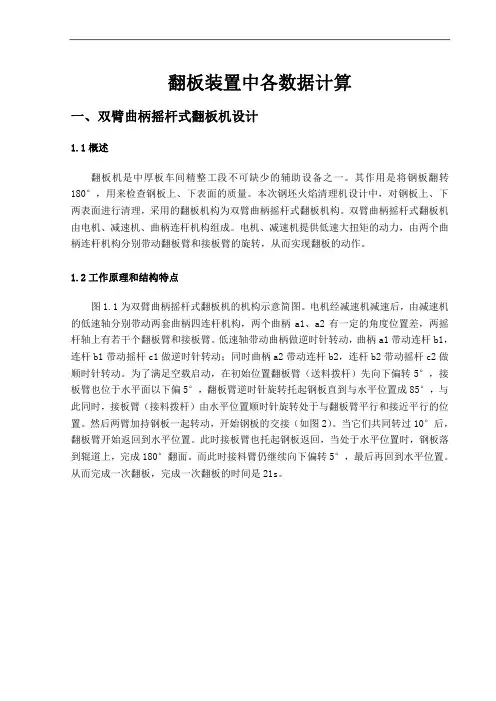
1.2 工作原理和结构特点图1.1为双臂曲柄摇杆式翻板机的机构示意简图。
电机经减速机减速后,由减速机 的低速轴分别带动两套曲柄四连杆机构,两个曲柄 a1、a2 有一定的角度位置差,两摇 杆轴上有若干个翻板臂和接板臂。
低速轴带动曲柄做逆时针转动,曲柄a1带动连杆b1, 连杆 b1 带动摇杆 c1 做逆时针转动;同时曲柄a2 带动连杆 b2,连杆 b2 带动摇杆 c2 做 顺时针转动。
为了满足空载启动,在初始位置翻板臂(送料拨杆)先向下偏转 5°,接 板臂也位于水平面以下偏5°,翻板臂逆时针旋转托起钢板直到与水平位置成85°,与 此同时,接板臂(接料拨杆)由水平位置顺时针旋转处于与翻板臂平行和接近平行的位 置。
然后两臂加持钢板一起转动,开始钢板的交接(如图2)。
当它们共同转过10°后, 翻板臂开始返回到水平位置。
此时接板臂也托起钢板返回,当处于水平位置时,钢板落 到辊道上,完成180°翻面。
而此时接料臂仍继续向下偏转5°,最后再回到水平位置。
从而完成一次翻板,完成一次翻板的时间是21s。
图1.1 转动角度初始位置图图1.2 接送位置角度图结构特点:1、两翻臂的摆动角度 100°,从水平线下 5°摆到过垂直位置 5°,当减速器输出轴的曲柄回转 360°,通过两连杆带动两摇杆在 105°来回摆动一次,两翻臂则在 100° 来回摆动一次, 两曲柄相位差22°8′14″, 故主动翻臂以-5°摆动托起钢板到85° 时,从动翻臂摆动100°过垂直线5°。
钢板卷筒机器设备钢板卷筒机器设备是一种用于加工钢板的机械设备,广泛应用于钢铁工业、建筑工程和汽车制造等领域。
它的主要功能是将钢板卷成卷筒形状,以便运输、储存和加工。
本文将介绍钢板卷筒机器设备的工作原理、应用领域以及市场前景。
一、工作原理钢板卷筒机器设备的工作原理主要包括三个步骤:上料、卷取和下料。
1. 上料:首先将待加工的钢板放在机器设备的上料位置。
上料过程中,需要确保钢板的位置准确,并在装夹时采取安全措施,以避免意外事故的发生。
2. 卷取:当上料完成后,机器设备会启动卷取机构。
这个机构将钢板轻松地卷取成卷筒形状。
卷取机构通常由一对滚筒和一组卷带组成,滚筒负责将钢板卷起,而卷带则起到支撑和保持卷筒形状的作用。
3. 下料:当钢板完成卷取后,卷筒会通过输送装置将其传送至下料位置。
在下料时,需要确保卷筒的位置准确,并采取适当措施以确保钢板的稳定。
二、应用领域1. 钢铁工业:钢板卷筒机器设备在钢铁工业中扮演着重要角色。
它可用于卷取不同规格和厚度的钢板,以满足不同生产需求。
钢板卷筒机器设备使钢铁企业能更高效地处理钢板,并降低生产成本。
2. 建筑工程:在建筑工程中,钢板卷筒机器设备可用于加工钢板,使其符合建筑需要。
它可以将大尺寸的钢板卷取成较小的卷筒,以方便储存和运输。
此外,在建筑工程中使用钢板卷筒机器设备,还可以提高构件制造的精度和质量。
3. 汽车制造:汽车制造是钢板卷筒机器设备的另一个重要应用领域。
在汽车制造过程中,大量的钢板需要加工,以制造汽车车身零部件。
钢板卷筒机器设备的应用可以提高汽车制造的效率和质量,减少废料产生,降低生产成本。
三、市场前景随着工业自动化程度的提高和对生产效率要求的增加,钢板卷筒机器设备的市场需求将不断增加。
在中国,钢铁工业和建筑工程行业的快速发展推动了钢板卷筒机器设备市场的增长。
此外,中国汽车制造业也是钢板卷筒机器设备市场的重要推动力之一。
随着技术的不断发展,钢板卷筒机器设备将不断更新换代,并且在工作效率和产品质量等方面不断提高。
集装箱翻转机工作原理宝子们!今天咱们来唠唠集装箱翻转机这个超酷的家伙的工作原理。
你看啊,集装箱翻转机就像是一个大力士,专门对付那些大大的集装箱呢。
这集装箱翻转机啊,有一个很结实的框架结构,就像人的骨架一样,稳稳地支撑着整个机器。
这个框架可不是随随便便的,它得足够坚固,才能承受住集装箱的重量。
你想啊,集装箱那可都是铁家伙,重得很呢!那它怎么把集装箱抓起来的呢?这就不得不说到它的抓取装置啦。
这个抓取装置就像一双大手,紧紧地抱住集装箱。
有的是那种机械臂式的,像变形金刚的手臂一样灵活又有力。
当它靠近集装箱的时候,就会准确地定位,然后“啪”的一下,把集装箱牢牢抓住。
这时候啊,就感觉像是一个小娃娃被大人稳稳地抱在怀里一样,特别有安全感。
接下来就是最神奇的翻转部分啦。
这就好比是在玩杂技一样。
你看那些杂技演员把东西在空中翻来翻去的,这集装箱翻转机也有这个本事呢。
它通过一些特殊的机械结构,就像是有魔法一样,让集装箱开始转动。
这个转动可不是乱转的哦,是按照我们想要的方向和角度来转的。
比如说,我们想要把集装箱里的货物倒出来,它就会慢慢地把集装箱翻转过来,就像把一个口袋里的东西倒出来一样。
在这个过程中,整个机器都在很平稳地运行,不会让集装箱突然掉下来或者晃得特别厉害。
这就像是一个经验丰富的老司机开车,稳稳当当的。
还有啊,集装箱翻转机的动力来源也很重要呢。
它就像是机器的心脏一样,给整个翻转过程提供力量。
一般来说,有电动的,就像我们家里的电器一样,通电了就有劲儿。
还有液压的,液压系统就像是一个隐藏的大力士,通过液体的压力来推动那些机械部件运动。
这个液压的力量可大了,就像绿巨人的力量一样,能轻松地让集装箱翻转起来。
而且啊,在整个翻转的过程中,还有很多小细节呢。
比如说,为了保证安全,它会有一些传感器。
这些传感器就像小眼睛一样,时刻盯着集装箱的状态。
如果有什么不对劲的地方,比如说集装箱没抓稳啦,或者翻转的角度太大有危险啦,它就会像一个小管家一样,马上发出警报,然后停止工作。

球形储罐焊接施工工艺规程1. 前言球形储罐是大型的化工储存设备,其使用涵盖了许多领域,如石油化工、化学制品、医药等等。
而其中最重要的组成部分就是焊接连接。
为了保证球形储罐能够安全稳定地运输储存化学品,焊接施工工艺规程必须遵循一定的标准要求和工艺规范。
2. 焊材焊接球形储罐的焊材应符合国家标准和合同规定的技术要求。
焊材分为母材、填充材和盖面材等三类。
选择时应注意以下要求:•母材:应选用动态负荷可靠性好、低温韧性好、防腐性好的低合金高强度钢。
•填充材:应选用质量好,非热裂纹敏感性较低的焊条、焊丝。
•盖面材:应选用含铬量高、耐蚀性好的焊条、焊丝。
3. 焊接准备3.1 钢板预处理对于球形储罐的钢板,应当先进行去油、除锈、洗涤等预处理工作。
去油可采用酸洗、碱洗、溶剂洗等方法。
除锈则最好采用喷砂除锈方法。
洗涤主要是为了去掉肉眼看不到的灰尘,以防对焊缝质量造成影响。
3.2 焊前检查在进行焊接之前,要对焊接设备、焊接人员以及焊接材料进行一个全面的检查。
焊接设备主要是指焊割设备、推进机、钢板翻转机等,这些设备应当进行检查,以确保正常运转。
焊接人员需要进行入职培训,确定岗位职责,并参见现行国家有关焊接的工艺规范、安全规程及相关标准。
焊接材料包括焊材、气体、盖面材等,其规格质量要满足相关标准的规定。
3.3 焊接准备在焊接之前,应事先确定好球型储罐的总体结构和焊接方式,制定焊接施工方案,并进行人员梦想演练,以确保焊接施工工作的顺利进行。
4. 焊接技术要求4.1 焊接方式球型储罐的焊接方式主要有自动焊接和手工焊,选择焊接方式取决于焊缝的形状、大小等,同时要考虑到焊接速度、质量和经济效益等因素。
4.2 焊前预热对于厚度超过20mm的钢板,焊接前应在焊缝周围进行预热,以提高焊缝的韧性和阻力热裂纹的产生。
预热温度一般不低于150℃,时间不少于2小时。
4.3 焊接层数为了确保焊接缝的牢固和质量,球型储罐的焊接采用多层交替施工来进行,一般焊接56层,必要时焊接810层。
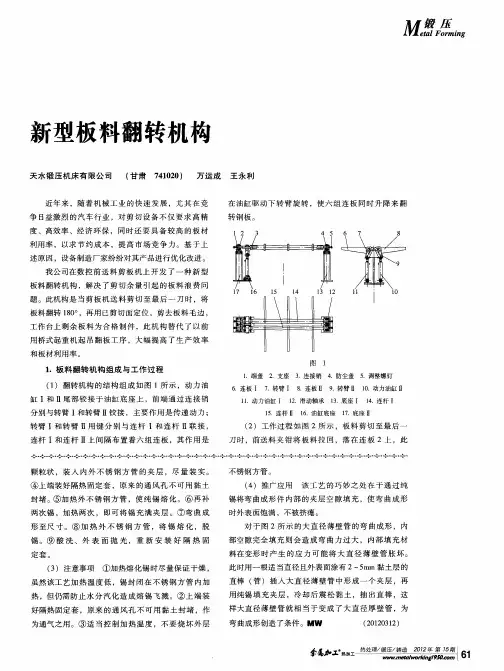
国内外翻转机发展现状概述[摘要]论文对国内外翻转机的现有类型进行了分析和探讨,归纳出常见的柱状翻转机、板式翻转机和头尾架式翻转机这三种翻转机构的结构特点和组成,总结出了三种翻转机构的结构特征、翻转过程以及翻转原理,并分别对国内外翻转机的发展现状进行了简单的总结分析,得出了目前国际上翻转机的发展趋势,同时总结出了我国现有翻转机的发展现状、发展前景以及发展方向,为原有翻转机结构的改进及新型翻转机结构的设计打下了基础。
[关键词]翻转机;柱状翻转机;板式翻转机;头尾架式翻转机翻转机是一种改变操作对象位置或姿态的专用设备,根据其实现的性能可分为钢卷翻转机,模具翻转机,钢板翻转机,垛料翻转机,焊接翻转机;根据其结构形式可分为头尾架式翻转机,柱状翻转机和板式翻转机;根据其驱动方式可分为液压翻转机和机械翻转机。
1 国外翻转机的发展现状国外翻转机的生产技术已经比较成熟,涵盖了上百种系列及型号的翻转机产品,翻转能力范围0.1吨~120吨。
下面介绍几种典型的翻转机类型。
美国Bushman设备公司所生产的翻转机包括CL型翻转机、L型液压翻转机、头尾架式翻转机、O型翻转机等几乎所有种类的产品。
CL型翻转机、O型翻转机和C型翻转机可统称为柱状外廓翻转机。
分析其特点发现:该类翻转机主车体外廓为圆柱状滚圈架,主车体滚转中心即为圆柱中心轴线;利用外廓为圆柱状的内侧L型或U型工作台约束工件,使工作台连同工件围绕虚拟的圆柱中心轴进行滚转实现工件翻转。
其中CL型翻转机工作台为L型,受力均匀,承载重量大,主要用于大型回转零件如钢卷,模具等大型零件的翻转[1]。
如图1所示,该翻转机为单自由度,由链条驱动的L型工作台的90°翻转机,其翻转过程见图2,负载范围1吨~120吨。
韩国SAMIL MFG公司生产的L型和可变型液压板式翻转机如图5所示,它的液压缸驱动系统和控制系统均封闭在防尘罩内,其翻转过程如板式翻转机的工作台是板状结构,翻转过程中依靠重力封闭和定位,无需装夹,占用空间小,采用液压驱动翻转[2]。
钢板翻转机构设计一、引言钢板翻转机构是一种用于将钢板从一个方向翻转到另一个方向的装置。
它在钢铁行业和其他相关行业中被广泛应用,可以提高生产效率和工作安全性。
本文将介绍钢板翻转机构的设计原理、结构和工作原理。
二、设计原理钢板翻转机构的设计原理是基于力学和动力学的原理。
在设计过程中,需要考虑到钢板的重量、摩擦力、倾斜角度和翻转速度等因素。
根据这些因素,设计师可以确定所需的机构型式和参数,以确保机构的稳定性和可靠性。
三、结构设计钢板翻转机构的结构设计通常包括以下几个组成部分:1. 框架:框架是钢板翻转机构的基本支撑结构,通常由钢材焊接而成。
框架的设计应考虑到机构的稳定性和承载能力,以确保机构在工作过程中不会出现变形或断裂。
2. 翻转臂:翻转臂是连接框架和钢板的关键部件,它负责承载和翻转钢板。
翻转臂的设计应考虑到钢板的重量和尺寸,以及机构的工作环境和要求。
3. 驱动装置:驱动装置是钢板翻转机构的动力来源,通常采用电动机或液压系统。
驱动装置的设计应考虑到机构的工作负荷和速度要求,以确保机构能够平稳、高效地完成翻转操作。
四、工作原理钢板翻转机构的工作原理可以简要描述如下:1. 将钢板放置在翻转臂上,并固定好。
2. 启动驱动装置,使翻转臂开始旋转。
3. 翻转臂将钢板从一个方向翻转到另一个方向,完成翻转操作。
4. 停止驱动装置,将翻转臂停在所需位置。
五、设计考虑因素在设计钢板翻转机构时,需要考虑以下因素:1. 钢板的重量和尺寸:钢板的重量和尺寸将直接影响机构的设计和承载能力。
2. 翻转速度和精度:根据实际需求确定翻转速度和精度,以确保机构的工作效率和翻转质量。
3. 安全性和可靠性:在设计过程中应考虑到机构的安全性和可靠性,以防止事故和故障的发生。
4. 维护和保养:机构的设计应方便进行维护和保养,以延长机器的使用寿命和降低维修成本。
六、应用领域钢板翻转机构广泛应用于钢铁行业和其他相关行业,如造船、轨道交通、机械制造等。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言在工业生产中,大工件的翻转是一个常见且重要的操作环节。
为确保工件在翻转过程中的稳定性和安全性,对翻转设备的力学分析显得尤为重要。
本文旨在分析大工件翻转过程中的力学原理,并设计一款高效的180度翻转机方案。
二、大工件翻转过程力学分析1. 力学原理概述大工件翻转过程的力学分析主要涉及力学原理中的重心平衡、扭矩平衡和转动惯量等方面。
在翻转过程中,必须确保工件的重心稳定,避免因重心偏移而导致的设备倾覆或工件损坏。
同时,需考虑扭矩平衡,确保翻转过程中的动力传递和阻力平衡。
此外,还需考虑转动惯量对翻转速度和稳定性的影响。
2. 力学模型建立根据大工件的形状、尺寸和质量等参数,建立力学模型。
通过分析工件在翻转过程中的受力情况,如重力、支持力、摩擦力等,计算扭矩和转动惯量等关键参数。
在此基础上,进行工件翻转过程的力学模拟和仿真分析。
3. 稳定性分析为确保大工件在翻转过程中的稳定性,需进行稳定性分析。
通过分析工件的重心位置、支撑点的位置和数量等因素,确定工件在翻转过程中的稳定状态。
同时,考虑外部干扰因素如振动、冲击等对稳定性的影响,为设备设计提供依据。
三、180度翻转机方案设计1. 设计要求根据大工件的特点和翻转需求,制定180度翻转机的设计方案。
设计要求包括翻转速度、精度、稳定性、安全性等方面。
同时,需考虑设备的结构简单、操作方便、维护成本低等因素。
2. 设备结构设备结构主要包括支撑装置、驱动装置、翻转机构等部分。
支撑装置用于支撑工件,确保其在翻转过程中的稳定性;驱动装置提供动力,驱动翻转机构进行翻转操作;翻转机构是实现工件180度翻转的核心部件。
3. 工作原理设备的工作原理主要基于力学原理和机械传动原理。
通过驱动装置驱动翻转机构,使工件绕支撑装置进行180度翻转。
为确保工件的稳定性和安全性,需根据力学分析结果进行精确的机械设计和传动系统设计。
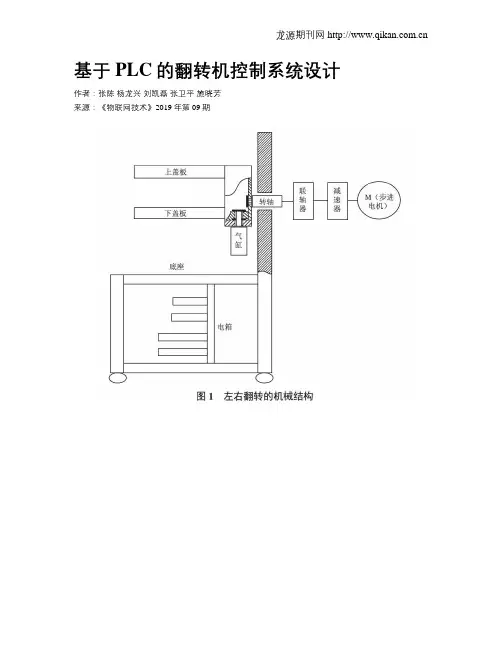
基于PLC的翻转机控制系统设计作者:张陈杨龙兴刘凯磊张卫平施晓芳来源:《物联网技术》2019年第09期摘要:文中给出一种用于自动冲压生产线五金板材翻转的设计方案,该翻转机主要由夹持和翻转两部分组成。
夹持部分由伸缩气缸、上下盖板和定位块组成;翻转部分由步进电机、减速机、联轴器和夹持部分支架组成。
控制系统硬件由三菱FX3U-64MT PLC、触摸屏GOT1155、步进电机驱动器及若干检测开关构成,并且还具有内部和外部两种控制模式。
外部模式时,由外部控制器通过I/O信号控制翻转台动作;内部模式时,可通过按钮或物料检测开关来控制翻转台。
验证结果表明每3 s可实现1个板材的翻转节拍。
关键词:翻转机;控制系统;外部控制器;步进电机;检测开关;结构设计中图分类号:TP39 文献标识码:A 文章编号:2095-1302(2019)09-0-030 引言在运输和加工过程中经常需要对零件进行翻转,传统方法一般采用天车实现翻转,这种吊装式翻转方法对于粗糙的大型构件比较适用,而对于精度要求高、外形特殊的构件,常常需要设计满足特定要求的翻转机。
在冲压场合中,工件冲压完成常需要将上下表面翻转,送入下一冲压工序进行冲压。
传统冲压生产由人工手动翻转,但随着冲压自动化水平不断提升,机器人辅助冲压自动生产线逐渐代替传统翻转方式。
其中,有采用两个六自由度机器人,两者之间可直接交换翻转;对于采用五自由度非标机器人,则需借助临时承料台实现工件翻转和转移;对于采用四自由度非标机器人,可由两个非标机器人和一台翻转机配合完成。
本文针对采用四自由度非标机器人的翻转机系统进行设计。
1 机械结构设计1.1 翻转要求首先由机器人将工件放置于翻转机的承料台上,翻转机感应到工件,然后进行翻转,这样就可实现被放置工件上下表面调换。
要实现此要求,一般要求工件放置好后需要将工件夹紧,旋转机构将其翻转180°,夹紧机构松开。
1.2 结构设计左右翻转机的机械结构如图1所示。
机械式180度翻转机构引言机械式180度翻转机构是一种常见的机械装置,它可以将一个物体在水平方向上翻转180度。
该机构的设计和应用广泛,可以用于各种领域,如自动化设备、机械加工和工业生产等。
本文将介绍该机构的结构原理、工作原理以及应用领域。
一、结构原理机械式180度翻转机构的结构原理相对简单,一般由支撑架、翻转臂和驱动装置组成。
1. 支撑架:支撑架是机械翻转机构的主要承载部分,用于稳定和支撑整个机构。
支撑架一般采用坚固的金属材料,如钢板或铝合金,以确保机械的稳定性和安全性。
2. 翻转臂:翻转臂是机械翻转机构的关键部分,它能够实现物体的翻转功能。
翻转臂通常由连接杆和转轴组成,连接杆通过转轴与支撑架相连接。
翻转臂的长度和强度需要根据具体需求来设计,以确保能够承受物体的重量并完成翻转动作。
3. 驱动装置:驱动装置是机械翻转机构的动力源,它可以驱动翻转臂进行翻转运动。
驱动装置一般采用电动机,通过传动装置将电动机的转动力传输给翻转臂,从而实现翻转的功能。
传动装置可以采用齿轮、链条或皮带等传动方式,具体选择取决于应用场景和需求。
二、工作原理机械式180度翻转机构的工作原理相对直观,其主要通过驱动装置带动翻转臂实现物体的翻转。
简单来说,当驱动装置启动时,翻转臂开始旋转,将待翻转的物体带到180度的翻转位置。
具体的工作过程如下:1. 初始化位置:在最初状态下,翻转臂处于水平位置,待翻转的物体位于翻转臂的一侧。
2. 启动驱动装置:通过启动驱动装置,驱动装置将转动力传输给翻转臂。
翻转臂开始转动,并携带着待翻转的物体进行运动。
3. 翻转动作:翻转臂旋转至180度的位置,待翻转的物体也随之翻转至与初始位置相反的方向。
这样,物体完成了180度的翻转。
4. 返回初始位置:翻转臂继续旋转,将物体带回初始位置,翻转动作完成。
该机构的工作原理简单直观,通过合理的设计和驱动机构的控制,能够稳定可靠地实现物体的180度翻转。
三、应用领域机械式180度翻转机构可以应用于多个领域,以下是其中几个常见的应用:1. 自动化设备:在自动化设备中,需要对物体进行定位和翻转操作。
翻转机的电机功率计算公式翻转机是一种用于翻转货物的设备,通常用于搬运重物或者在生产过程中进行物料的翻转。
翻转机通常配备有电机,以提供足够的动力来完成翻转操作。
在设计和选择翻转机的电机时,需要考虑到所需的功率,以确保能够满足翻转操作的要求。
本文将介绍翻转机的电机功率计算公式,以帮助读者了解如何计算所需的电机功率。
翻转机的工作原理和应用。
翻转机通常由机架、翻转装置、电机、传动系统等部件组成。
在进行翻转操作时,电机通过传动系统驱动翻转装置,使货物进行翻转。
翻转机广泛应用于各种行业,如物流、制造业、仓储等领域,用于搬运和翻转各种类型的货物,如容器、箱子、钢板等。
翻转机的性能和效率直接受到电机功率的影响,因此正确计算所需的电机功率对于翻转机的设计和选择至关重要。
电机功率的计算公式。
翻转机的电机功率计算公式可以通过以下步骤进行推导。
首先,需要确定所需的翻转力矩,然后根据翻转速度和传动效率计算出所需的功率。
1. 确定翻转力矩。
翻转力矩是翻转机进行翻转操作所需的力矩,通常由以下公式计算得出:翻转力矩 = 货物重量×翻转半径。
其中,货物重量是指待翻转货物的重量,翻转半径是指货物离翻转轴心的距离。
通过这个公式可以得到所需的翻转力矩,以确定电机所需提供的动力。
2. 计算功率。
根据翻转力矩和翻转速度,可以计算出所需的功率。
功率的计算公式如下:功率 = 翻转力矩×翻转速度 / 9550。
其中,翻转速度是指翻转机进行翻转操作的速度,9550是一个常数,用于将单位转换为千瓦。
通过这个公式可以得到所需的电机功率,以满足翻转操作的要求。
3. 考虑传动效率。
在实际应用中,传动系统的效率通常不是100%,因此需要考虑传动效率对功率的影响。
传动效率通常在90%到95%之间,具体数值取决于传动系统的类型和质量。
因此,在计算功率时,需要将传动效率考虑在内,以确保所选的电机能够满足实际的翻转操作需求。
实际应用和案例分析。
《大工件翻转设备翻转过程力学分析及180度翻转机方案设计》篇一一、引言随着工业自动化水平的不断提高,大工件翻转设备在众多领域中得到了广泛应用。
本文旨在分析大工件翻转过程中的力学行为,并针对180度翻转机进行方案设计。
首先,我们将对大工件翻转过程中的力学原理进行详细分析,然后提出一种有效的180度翻转机设计方案。
二、大工件翻转过程力学分析大工件翻转过程中,力学行为主要涉及重力、摩擦力、惯性力及作用在工件上的外力等。
这些力相互作用,决定了工件的翻转过程及稳定性。
1. 重力:大工件在翻转过程中受到的重力是影响其运动状态的主要因素。
重力方向垂直向下,对工件的翻转产生阻碍作用。
2. 摩擦力:工件与翻转设备表面之间的摩擦力也是影响翻转过程的重要因素。
摩擦力方向与工件运动方向相反,有助于减缓工件的转动速度。
3. 惯性力:大工件由于其质量大、体积大,具有较大的惯性。
在翻转过程中,惯性力会使工件保持原有的运动状态,对翻转过程产生一定的影响。
4. 外力:作用在工件上的外力,如驱动装置产生的扭矩等,是使工件发生翻转的关键因素。
在分析这些力的基础上,我们需要考虑如何通过合理的机械结构设计,使设备在保证安全的前提下,实现大工件的顺利翻转。
三、180度翻转机方案设计针对大工件的180度翻转需求,我们提出以下设计方案:1. 设备结构:翻转机主要由底座、翻转架、驱动装置、定位装置等部分组成。
底座用于支撑整个设备,保证其稳定性;翻转架用于承载和固定大工件;驱动装置提供翻转所需的扭矩;定位装置用于确保工件在翻转过程中的准确位置。
2. 工作原理:通过驱动装置驱动翻转架旋转,使大工件实现180度翻转。
在翻转过程中,定位装置确保工件始终处于正确的位置,以保证翻转的准确性。
同时,通过调整驱动装置的转速和扭矩,可以控制翻转的速度和力度,以适应不同大小和重量的工件。
3. 安全措施:为确保大工件在翻转过程中的安全,我们需采取以下措施:一是设置限位装置,防止工件在翻转过程中超出设备范围;二是采用高强度材料制作设备结构,提高设备的承重能力和抗冲击性能;三是设置紧急停止按钮,以便在异常情况下迅速停止设备运行。
一、题目实现内容:将钢板翻转180°实现过程:当钢板T由辊道送至左翻板W1后,W1开始顺时针方向转动。
转至铅垂位置偏左10°左右时,与逆时针方向转动的右翻板W2会合。
接着,W1与W2一同转至铅垂位置偏右8°左右,W1折回到水平位置,与此同时,W2顺时针方向转动到水平位置。
机构原理图:图一二、已知条件:1)原动件由旋转式电机驱动;2)每分钟翻钢板15次;3)其他尺寸如图所示;4)许用传动角[γ]=40°三、设计任务1、提出可能的运动方案,进行方案分析评比,选出一种运动方案进行设计;2、确定电动机的功率与转速;3、设计传动系统中各机构的运动尺寸,绘制钢板翻版机机构的运动简图;4、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构进行运动仿真,并画出输出机构的位移、速度、和加速度线图。
5、图纸上绘出最终方案的机构运动简图(可以是计算机图)并编写说明书。
四、过程分解过程一:左翻板W1开始顺时针方向转动,转至铅垂位置偏左10°左右。
右翻板再次过程中也逆时针转动向左板靠近,直至贴合。
过程二:左翻板W1与右翻板W2一同转至铅垂位置偏右8°左右。
过程三:W1折回到水平位置,与此同时,W2顺时针方向转动到水平位置。
五、给出方案设计数据AD长度L4 1500CD及C1D长度L3 500右板与左板贴合时∠ADC大小22°120°右板与左板贴合时∠AD C1大小六、提出方案方案一运动简图:图二左板设计计算图三图中AD=1500 CD=500 令∠ADC=α ∠AD C 1=β 且CD=C 1D=L 3 AD= L 4则当右夹板与左夹板贴合时α= ,β在三角形ACD 中, ,**2**23422324222L L AC L L CD AD AC CD AD COS -+=-+=α 12342,***22324L L AC COS L L L L AC -=-+=α即①,在三角形AC 1D 中,,**2**234212324121212L L AC L L D C AD AC D C AD COS -+=-+=β 即AC 12=L 42+L 32-2*L 3*L 4*COS β,AC 1=L 2+L 1② 由①②带入数值解得:L2=1428, L1=374.8右板设计计算图四∠GDA=20°∠GDA+∠ADF=180° 则∠ADF=160°在△ADF 中 AD=1500 ,DF=450, ∠ADF=160° 算得:AF=1929.01 ∠DFA=15.4°∠AFE=∠DFE-∠DFA=40°-15.4°=24.6°在△AFE 中 AF=1929.01,EF=500,∠AFE=24.6° 算得:AE=1489(即L 22)在△AF 1E 中 AF=1929.01 ∠AF 1E =24.6°+82°=106.6° F 1E =500 算得:A 1E =2126.54(即:L 12+ L 22) 故:L 12=637.54 L 22=1489 方案二排除左右夹板的曲柄在一个平面的相互干扰,设计左右夹板同轴但不同平面的圆周上运动。
机构创新设计1 钢板翻转机工作原理钢板翻转机构工作原理图设计任务:1)用图解法或解析法完成机构系统的运动方案设计,并用机构创新模型加以实现;2)绘制出机构系统运动简图,并对所设计的机构系统进行简要的说明。
1.1设计要求设计机构带动两夹板来实现钢板翻转180°的动作;原动件由旋转式电动机驱动;每分钟翻钢板六次;许用传动角为50度。
1.2 工艺动作分解设计机具实现将钢板反转180度。
钢板翻转机工作过程,当钢板T 由传送带送至左翻板W1后,W1开始顺时针方向转动。
转至铅垂位置偏左10度左右时,与逆时针方向转动的右翻板W2会和。
接着,W1与W2一同转至铅垂位置偏右10度左右,W1折回到水平位置,与此同时,W2顺时针方向转动到水平位置,从而完成钢板翻转任务。
2 传动装置设计2.1 执行构件的运动参数2.2 拟定传动方案已知原动件曲柄的转速为n=6r/min ,一般选用同步转速为1000或1500的电动机作为原动机,因此传动装置总传动比约为或150,为使传动装置结构尺寸尽量小,应选择较小的传动比,所以选用转速为1000的电动机.由于传动比较大,可采用蜗轮蜗杆传动或者复合轮系传动。
2.3 电动机选择1)根据电源及工作机工作条件,选用卧式封闭型Y (IP44)系列三相交流异步电动机。
2)工作所需功率根据工作要求,工作机主动轴的输出转矩约为T=3000(N ·m )和转速n=6r/min ,则工作机主动轴所需功率为9550tnc pw =kW=955063000⨯=1.88kw 假设传动装置的总效率为装置的总效率为=0.6,则电动机输出功率Pd=3.14kW3)电动机额定功率根据pd=3.14kW,选取电动机额定功率Ped=4kW。
4)传动装置总传动机构原动件曲柄转速=6,电动机的满载转速=960,则传动装置总传动比为i=160。
3 机械协调设计简析3.1 方案一图1工作机构选择两套曲柄摇杆机构如图1、图2所示,分别是两套曲柄摇杆机构的极限位置,在P点上,两曲柄成170°固结,对于两个摇杆,二者正好同时达到极限位置。
当曲柄以6r/min速度顺时针旋转了180°时,两摇杆恰好同时到达极限位置,使交接钢板的重合位置位于垂直方向向左偏10°的位置,并同时捏合运动至位置位于垂直方向向右偏10°的位置。
再转180°同时回到初始位置,并且曲柄的转动是匀速的,就这样同时进程,同时回程,往复循环。
机械运动循环图如图3。
图2图3图4 根据图4,计算左边曲柄摇杆机构的尺寸设曲柄长度a1、连杆长度b1、摇杆长度c1。
O1A、O1B为摇杆的两极限位置,O1C为∠AO1B的角平分线。
根据题意,θ1=θ2=50°。
过P作O1C的垂线,分别交O1A、O1C、O1B于点A、C、B。
已知O1C=450mm,PC=2000mm则 O1A=C1=oCO50cos4501cos1=θ=700mmAC=BC=O1C*tanθ1=536.29mm所以 b1*a1=pc*ac=1463.71mmb1+a1=pc+bc=2536.29mm联立可得: a1=536.29mmb1=2000mm左摇杆长=700mm;左曲柄长=536.29mm;左连杆长=2000mm 根据图5,计算右边曲柄摇杆机构的尺寸\设曲柄长度a2、连杆长度b2、摇杆长度c2。
D、E为摇杆的两极限位置,O2F为∠DO2E的角平分线。
根据题意,θ3=θ4=40°。
过P作O2F的垂线,分别叫D、F、E于点D、F、E, PM为过P点的水平线,过O2作M⊥PM于点M。
PM=PC+O1O2=2450mm O2M=450mm PO2=2491mm图5tan ∠PO 2M=PM/O 2M=5.44 则 ∠PO 2M=79.6° 已知 ∠DO 2M=50°则 ∠PO 2D=∠PO 2M-∠DO 2M=29.6° 得 ∠PO 2F=∠PO 2D+θ3=69.6°O 2F=cos ∠PO 2F=2491×cos69.6°=868.3mm PF=2334.77mmO 2D=c 2=O 2F/COS 3θ=1133.5mm DF =EF=728.6mm 所以 b 2+a 2=PF+EF=3063.37mm b 2-a 2=1606.17mm 联立可得: a 2=728.6mm b 2=2334.77mm右摇杆长=1133.5mm 右曲柄长=728.6mm 右连杆长=2334.7mm图6如图6,设曲柄角速度1ω,长度l 1,与机架夹角1θ,连杆与机架夹角2θ,摇杆角速度3ω,长度3l 、与机架夹角3θ,则 α=90°*21θθ-β=90°*23θθ+因为 βαcos **cos **3311l w l w = 即 w 1*l 1*)sin(*)sin(233321θθθθ-=+l w得 )sin(*)sin(**23321113θθθθ-+=l l w w当曲柄和连杆共线时,摇杆速度为0,即摇杆在两个极限位置时的速度为0,这样有助于顺利盛放和交接钢板,避免冲撞,而在中间过程时速度较快,能够节省时间,以满足每分钟翻钢板6次的要求。
经过计算检验,该方案可行,选择合适的电机和运动方案进行运动仿真3.2 方案二选定方案运动简图:图7 计算如下:图8经过计算可确定: AD=1500, CD=500, α=20。
β=120ْ 在三角形ACD 中,,**2**23422324222L L AC L L CD AD AC CD AD COS -+=-+=α 12342,***22324L L AC COS L L L L AC -=-+=α即 (1)在三角形AC 1D 中,,**2**234212324121212L L AC L L D C AD AC D C AD COS -+=-+=β 1234232421,***2L L AC COS L L L L AC +=-+=β即 (2)()︒⨯⨯⨯-+=-+=-20500150025001500***222342324212COS COS L L L L L L α由(1)(2)得:L2=1423.52 L1=379.27图9在三角形AFG 中, FGAG AFFG AG **2222cos -+=θ在三角形AFG 中, FGAG AF FG AG COS **2222-+=θL22=1800, L12=311.08 计算结果:左半机构: L 1=379.27, L 2=1423.52, L 3=500, L 4=1500 右半机构: L 12=311.08, L 22=1800, L3=500, L 4=1929.01杆长关系检验: 左半机构:L min +L max =L 1+L 4=1879.27<L 2+L 3=1923.52 右半机构:L min +L max =L 12+L 4=2240.09<L 2+L 3=2300连杆到位情况:图10A(311.08,311.08), E 1(1.69,278.7), E 2(396.22,11.88), E 3(622.1,317.18), F 1(1791.91,466.04), F 2(2175.02,287.97), F 3(2421.75,353.09), G(2175.02,784.22)位。
的符号相同,连杆能到带入数据分别求得:)(()()()(出:的模式值表达式可以列组解析法检验,从动二杆)3,2,1(286.64,763.21,6532.34)3,2,1***1321=====----=i MD MD MD MD i x x y y y y x x MD FEA Bi i A Bi Ci B A i B i C ()[]()n i L L MD DC BC i i ,,•••=•=1/arcsin γ的条件。
满足︒≥︒=︒=︒=50,73.65,27.57,08.52321i γγγγ经过计算检验,该方案可行,选择合适的电机和运动方案进行运动仿真4 方案分析经前文对杆长计算检验与运动仿真,方案一与方案二均可行。
方案二,圆盘上的曲柄机构和连杆机构需要用用一根轴连接使之不在一个平面内以达到运动的效果,因而产生很大磨损,容易使构件损坏。
而方案一当曲柄和连杆共线时,摇杆速度为0,即摇杆在两个极限位置时的速度为0,这样有助于顺利盛放和交接钢板,避免冲撞,而在中间过程时速度较快,能够节省时间,以满足每分钟翻钢板十次的要求。
所以确定最优方案是方案一。
5 设计心得课程设计是我们专业课程知识综合应用的实践训练,也是我们迈向社会,从事职业工作前一个必不少的过程。
让我们认识到创新的重要性。
头脑里固有的思维,习惯总是会将自己陷在问题里,在一种思路上纠结不清。
而往往只有通过创新,通过一种新的角度才能使所有的问题都得到顾及,而解决问题。
组员之间讨论免不了是不同意见的交锋,免不了对自己的意见固守不放而伤害别人。
因此想法要深思熟虑,要先倾听别人,以尊重来换取尊重,团队的效率才是最重要的。
其次,这次课程设计使我在工作作风上得到了一次难得的磨练。
通过课程设计,使我深深体会到,干任何事都必须耐心,细致。
课程设计过程中,许多计算有时不免令我感到有些心烦意乱,但想到今后自己应当承担的社会责任,我就提示自己,一定必须养成一种高度负责,认真对待的良好习惯。