基4-FFT算法编程
- 格式:doc
- 大小:439.50 KB
- 文档页数:7
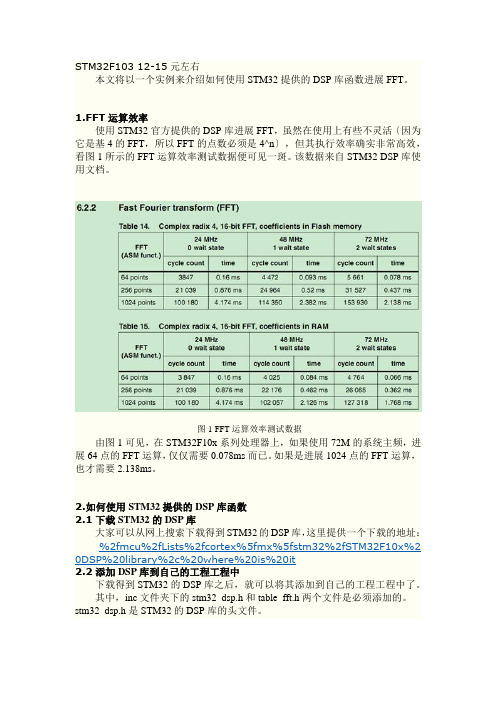

常用FFT 算法总结一、DFT 及IDFT 的定义对于N 点有限长序列)(n x ,其DFT 及IDFT 定义如下: DFT :∑-==10)()(N n nk N W n x k XIDFT :∑-=-=1)(1)(N k nk NWk X Nn x其中,Np j p NeW/2π-=称为旋转因子,p 称为旋转因子的指数。
二、基2-FFT 算法 设序列)(n x 的长度N 满足MN2=,M 为自然数。
1、时间域抽取FFT (DIT-FFT ) (1)算法原理按n 的奇偶把)(n x 分解为两个N/2点的子序列:)12()()2()(21+==r x r x r x r x则)(n x 的DFT 为)()()12()2()(2112/0)12(12/02k X W k X Wr x Wr x k X kN N r k r NN r rk N+=++=∑∑-=+-=其中)(1k X 和)(2k X 分别为)(1r x 和)(2r x 的N/2点DFT 。
利用)(1k X 和)(2k X 的周期性,)(k X 可以表示为⎪⎩⎪⎨⎧-=++=)()()2()()()(2121k X W k X N k X k X W k X k X kN k N 上式表明一个N 点的DFT 可以用两个N/2点的DFT 来表示。
(2)运算量 当MN2=时,共有M 级蝶形,每级N/2个蝶形,每个蝶形有1次复数乘法2次复数加法。
复数乘法:NN M N mF2log22==复数加法:NN NM a F2log==NN NN NFFT m DFT m F F 222log2log 2)()(==(3)蝶形运算⎪⎩⎪⎨⎧-=+=----)()()()()()(1111j X W k X j X j X W k X k X m pN m m m pN m m m表示第m 级迭代,k 和j 表示数据所在的行数,12-+=m k j ,m M k p -⋅=2。
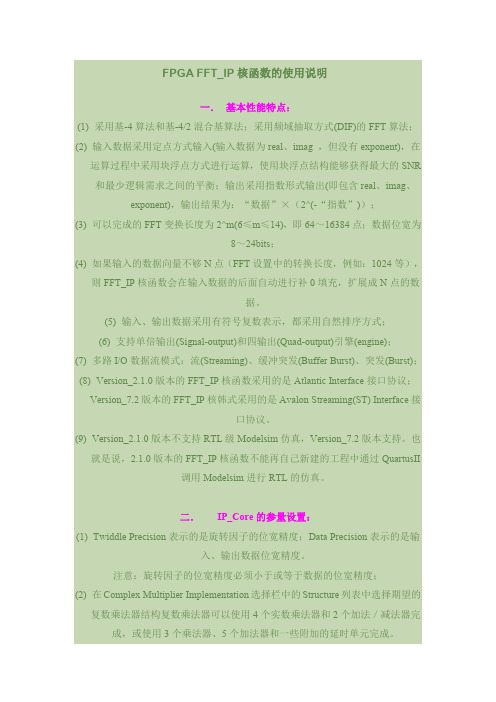
FPGA FFT_IP核函数的使用说明一.基本性能特点:(1)采用基-4算法和基-4/2混合基算法;采用频域抽取方式(DIF)的FFT算法;(2)输入数据采用定点方式输入(输入数据为real、imag ,但没有exponent),在运算过程中采用块浮点方式进行运算,使用块浮点结构能够获得最大的SNR 和最少逻辑需求之间的平衡;输出采用指数形式输出(即包含real、imag、exponent),输出结果为:“数据”×(2^(-“指数”));(3)可以完成的FFT变换长度为2^m(6≤m≤14),即64~16384点;数据位宽为8~24bits;(4)如果输入的数据向量不够N点(FFT设置中的转换长度,例如:1024等),则FFT_IP核函数会在输入数据的后面自动进行补0填充,扩展成N点的数据。
(5)输入、输出数据采用有符号复数表示,都采用自然排序方式;(6)支持单倍输出(Signal-output)和四输出(Quad-output)引擎(engine);(7)多路I/O数据流模式:流(Streaming)、缓冲突发(Buffer Burst)、突发(Burst);(8)Version_2.1.0版本的FFT_IP核函数采用的是Atlantic Interface接口协议;Version_7.2版本的FFT_IP核韩式采用的是Avalon Streaming(ST) Interface接口协议。
(9)Version_2.1.0版本不支持RTL级Modelsim仿真,Version_7.2版本支持。
也就是说,2.1.0版本的FFT_IP核函数不能再自己新建的工程中通过QuartusII调用Modelsim进行RTL的仿真。
二.IP_Core的参量设置:(1)Twiddle Precision表示的是旋转因子的位宽精度;Data Precision表示的是输入、输出数据位宽精度。
注意:旋转因子的位宽精度必须小于或等于数据的位宽精度;(2)在Complex Multiplier Implementation选择栏中的Structure列表中选择期望的复数乘法器结构复数乘法器可以使用4个实数乘法器和2个加法/减法器完成,或使用3个乘法器、5个加法器和一些附加的延时单元完成。
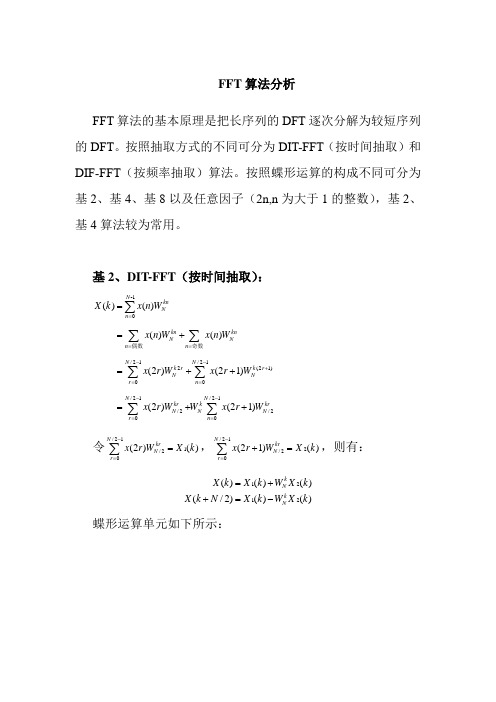
FFT 算法分析FFT 算法的基本原理是把长序列的DFT 逐次分解为较短序列的DFT 。
按照抽取方式的不同可分为DIT-FFT (按时间抽取)和DIF-FFT (按频率抽取)算法。
按照蝶形运算的构成不同可分为基2、基4、基8以及任意因子(2n,n 为大于1的整数),基2、基4算法较为常用。
基2、DIT-FFT (按时间抽取):-1/21/212(21)/21/21/2/2()() ()()(2)(21)(2)(21)N knNn knknN Nn n N N k r k r NNr n N N kr k krN NN r n X k x n Wx n W x n W x r Wx r Wx r WWx r W ===--+==--====+=++=++∑∑∑∑∑∑∑偶数奇数000令/211/2(2)()N kr N r x r WX k -==∑,/212/2(21)()N krN r x r W X k -=+=∑,则有:1212()()()(/2)()()kN k NX k X k W X k X k N X k W X k =++=-蝶形运算单元如下所示:基2、DIF-FFT (按频率抽取):-10/211/2/21/21(/2)/21/2/21/2()() ()()()(/2)[()(/2)](2)[()(/2)](21)[()(N knNn N N kn knNNn n N N N kn k n N NNn n N kN kn NNn N rnN n X k x n Wx n Wx n W x n Wx n N W x n Wx n N WX r x n x n N W X r x n x n N =--==--+==-=-===+=++=++=+++=-+∑∑∑∑∑∑∑00000/21/2/2)]N n rnN N n W W -=∑则有:12()()(/2)()[()(/2)]nNx n x n x n N x n x n x n N W =++=-+蝶形运算单元如下所示:由前面的分析可知,DIT (按时间抽取)算法与DIF (按频率抽取)算法没有本质上的区别,只是复数加减法与旋转因子乘法的次序有区别,两种方法的运算量是一样的。

快速傅⾥叶变换-基4时间抽取FFT算法matlab实现快速傅⾥叶变换-基4时间抽取FFT 算法matlab 实现作者姓名:李林摘要:FFT ( 快速傅⾥叶变换) 算法与DFT (离散傅⾥叶变换) 算法⽐较, 其运算量显著减少, ⽤计算机实现时速度⼤为提⾼。
但FFT 过程所需的运算量仍较可观, 常给数字信号的实时处理带来困难,理论和实践表明, 若要加快FFT 算法在计算机上的实现, 关键是得设法减少FFT 过程在乘法运算上的时间开销。
若改进算法, 减少过程中的乘法次数, 则⽆疑能加快FFT 的实现。
通常的FFT 幂法都是“基2 分解法” , 即长度为N 的DFT 序列由两个长度为2 / N 的DFT 序列的组合表⽰; ⽽这两个长度为2 / N 的DFT 序列各⾃⼜分别由两个长度为4 / N 的DFT 序列的组合表⽰ , 按照这⼀做法对序列进⾏反复分解, 直到每个序列的长度等于2为⽌。
这个分解、组合过程如同⼀棵标准⼆叉树。
按分解的逆过程进⾏组合运算便得到所要求的频谱序列)n ( F ,... , l , 0 (n ,1- N ) 整个变换过程共需要进⾏ N log 2 / N 2次复数乘法运算。
参考上述的分解、组合⽅法, 对序列进⾏“ 基4 分解” ,即长度为N 的DFT 序列由四个长度为4 / N 的DFT 序列组合表⽰。
关键词: FFT 基2分解法基4分解运算时间和精度⽬录⼀,前⾔1,实验⽬的2,题⽬要求3,考查要求⼆,基—4FFT算法原理1,基—4FFT定义:2,举例3,旋转因⼦kmW的性质N4,16点基4时间抽取FFT算法流图三,基—4FFT运算的实现1,算法分析2.算法流程图3.Matlab程序执⾏结果四,两种程序运算量分析和⽐较 1,matlab⾃带函数运算量分析2,基四FFT的运算量3,运算结果⽐较4,结果分析五,设计总结六,参考⽂献七,附录:⼀,前⾔1,实验⽬的:检查学⽣的综合应⽤能⼒。
FFT算法设计(含程序设计)简介快速傅里叶变换(FFT)是一种高效计算离散傅里叶变换(DFT)的算法,它的运算复杂度是O(nlogn)。
FFT在信号处理、图像处理、通信以及其他领域中广泛应用。
本文将介绍FFT算法的原理,并给出一个简单的FFT算法的程序设计示例。
FFT算法原理FFT算法基于DFT的性质,通过利用对称性和周期性,将一个长度为n的序列划分为多个规模较小的子序列,并对其进行逐步变换,最终得到整个序列的傅里叶变换结果。
FFT算法的核心思想是分治法,即将一个长度为n的序列划分为两个长度为n/2的子序列,然后对子序列分别进行FFT变换,再进行组合得到原序列的DFT。
具体的步骤如下:1. 如果n=1,DFT即为序列本身;2. 将长度为n的序列划分为两个长度为n/2的子序列,分别为序列A和序列B;3. 对序列A进行FFT变换得到A的傅里叶变换结果;4. 对序列B进行FFT变换得到B的傅里叶变换结果;5. 将A和B的傅里叶变换结果按照以下公式组合得到原序列的傅里叶变换结果:![FFT公式]()FFT算法程序设计示例下面是一个使用语言实现的简单FFT算法的程序设计示例:import cmathdef fft(x):N = len(x)if N <= 1:return xeven = fft(x[0::2])odd = fft(x[1::2])T = [cmath.exp(-2j cmath.pi k / N) odd[k] for k in range(N // 2)]return [even[k] + T[k] for k in range(N // 2)] + [even[k] T[k] for k in range(N // 2)]测试代码x = [1, 2, 3, 4]X = fft(x)print(X)以上代码实现了一个递归版本的FFT算法。
输入序列x为长度为2的幂次的复数序列,输出序列X为其傅里叶变换结果。
一、前言Fast Fourier Transform(FFT)是一种用来计算离散傅立叶变换(DFT)的算法。
radix-4 fft是一种基于四次根的FFT计算方法,它可以在一定程度上优化FFT的计算速度和效率。
本文将介绍radix-4 fft的计算原理,希望能够让读者对其有一个更深入的了解。
二、FFT算法概述1. DFT的定义离散傅立叶变换(DFT)是一种将离散的时域信号转换成离散的频域信号的变换方式。
它的定义如下:\[X[k] = \sum_{n=0}^{N-1} x[n] \cdot e^{-j\frac{2\pi}{N}kn}\]其中,\(x[n]\)是输入的时域信号,\(X[k]\)是输出的频域信号。
2. FFT的概念FFT是一种用来加速DFT计算的算法。
它可以将DFT的复杂度从O(N^2)降低到O(NlogN)。
在很多实际应用中,FFT都被广泛应用于信号处理、通信系统等领域。
三、radix-4 fft的计算原理1. 基本思想radix-4 fft是一种基于四次根的FFT计算方法。
它的基本思想是将DFT的计算任务划分成多个子任务,然后利用四次根的性质来优化计算过程。
具体来说,它将一个长度为N的DFT计算分解成四个长度为N/4的DFT计算,然后通过一系列的旋转因子来完成计算。
2. 算法流程radix-4 fft的算法流程可以简单概括为以下几个步骤:- 将输入序列分成奇偶部分,分别进行DFT计算;- 利用四次根的性质对奇偶部分进行二次合并;- 利用旋转因子对合并后的结果进行变换;- 重复上述步骤直到计算完成。
3. 算法优化在radix-4 fft的计算过程中,有很多可以进行优化的地方。
可以利用指数函数的对称性来减少计算量;可以使用分块技术来提高内存访问效率;可以采用乘积累加技术来减少乘法运算次数等。
这些优化能够在一定程度上提高radix-4 fft的计算速度和效率。
四、结论radix-4 fft作为一种基于四次根的FFT计算方法,具有很强的计算优化能力。
7.6实验6:快速傅里叶变换-基4时间抽取FFT 算法matlab 实现7.6.1实验目的1.练习利用matlab6.5中工具箱中的信号处理函数2.熟悉快速傅里叶变换的基本原理3.熟悉基4DIT-FFT 运算的MATLAB 程序并运用7.6.2涉及函数信号处理函数X=fft(x)或者X=fft(x,N):自定义功能函数function [Xk]=DIF_FFT_4(xn,N)7.6.3实验原理与方法(基-4时域抽取算法与基-2时域抽取算法具有完全相同的实质,两者的差异仅源于基的选择不同。
)1 DIT-FFT 算法的基本原理有限长序列x (n )的N 点DFT 定义为:∑-==10 )()(N n n k N W n x k X ,式中N j N eW π2-=,其整数次幂简称为旋转因子。
N 符合2的整数幂,N 为2的几次幂,则需要进行几次分解。
碟形运算流图符号如下:2 DIT-FFT 算法的运算规律及编程思想为了编写DIT-FFT 算法的运算程序,首先要分析其运算规律,总结编程思想并绘出程序框图。
由右图可知,DIT-FFT 算法的运算过程很有规律。
2.1 原位计算对M N 2=点的FFT 共进行M 级运算,每级由N /2个蝶形运算组成。
在同一级中,每个蝶的输入数据只对本蝶有用,且输出节点与输入节点在同一水平线上,这就意味着每算完一个蝶后,所得数据可立即存入原输入数据所占用的数组元素(存储单元),这种原位(址)计算的方法可节省大量内存。
2.2 蝶形运算实现FFT 运算的核心是蝶形运算,找出蝶形运算的规律是编程的基础。
for mm=1:m %将DFT 做m 次基2分解,从左到右,对每次分解作DFT 运算 Nmr=2^mm;u=1; %旋转因子u 初始化WN=exp(-j*2*pi/Nmr); %本次分解的基本DFT 因子WN =exp(-i*2*pi/Nmr)for n=1:Nmr/2 %本次跨越间隔内的各次碟形运算for k=n:Nmr:N %本次碟形运算的跨越间隔为Nmr=2^mmkp=k+Nmr/2; %确定碟形运算的对应单元下标(对称性)t=x(kp)*u; %碟形运算的乘积项x(kp)=x(k)-t; %碟形运算的加法项x(k)=x(k)+t;endu=u*WN; %修改旋转因子,多乘一个基本DFT 因子WN2.3 序列倒序为了保证运算输出的X (k )按顺序排列,要求序列x (n )倒序输入,即在运算前要先对输入的序列进行位序颠倒。