红外避障小车原理介绍及制作PPT课件
- 格式:ppt
- 大小:388.50 KB
- 文档页数:12

红外避障小车原理介绍
红外避障小车是一种利用红外线传感器进行避障操作的智能小车。
其原理基于红外线传感器的工作原理,通过发射红外线并接收反射回来的信号来判断前方是否有障碍物。
红外线传感器是一种能够感受和测量红外线辐射的装置。
它通过发射红外线并利用接收器接收反射回来的红外线信号,然后将信号转换成电信号进行处理。
在红外避障小车中,通常会使用多个红外线传感器分布在小车的前方。
当红外线传感器发射的红外线信号被障碍物反射回来时,传感器接收到的信号强度会发生变化。
通过测量信号强度的变化,可以判断前方是否存在障碍物。
如果信号强度足够高,表示前方没有障碍物;而如果信号强度较弱,表示前方有障碍物。
基于这样的原理,红外避障小车可以实现自主避障的功能。
当小车前方的红外线传感器检测到障碍物时,控制系统会立即做出响应,比如停下或者转向以规避障碍物。
通过不断地检测和响应,小车可以在遇到障碍物时自动调整行驶路径,避免碰撞。
红外避障小车的原理简单而有效,广泛应用于自动导航、智能机器人等领域。
它可以提高小车的可靠性和安全性,使其能够自主地在复杂环境中行驶。
同时,红外线传感器也具有较低的成本和易于使用的特点,使得红外避障小车成为一种受欢迎的智能设备。
红外避障原理
红外避障技术是一种利用红外线传感器来检测障碍物并进行避让的技术。
在现代社会中,红外避障技术被广泛应用于各种领域,如智能家居、机器人、自动驾驶等。
其原理是利用红外线传感器发射红外线,当红外线遇到障碍物时,会被障碍物反射回来,传感器接收到这些反射的红外线信号并进行处理,从而判断障碍物的位置和距离,进而实现避障功能。
红外避障技术的原理非常简单,但却非常有效。
红外线传感器是通过发射和接收红外线来实现避障功能的。
当红外线传感器发射红外线时,如果没有障碍物,红外线会直线传播,不会被任何物体反射回来;但是当红外线遇到障碍物时,障碍物会反射一部分红外线回来,传感器接收到这些反射的红外线信号后,就可以根据反射的强弱和时间来判断障碍物的位置和距离。
通过这种方式,红外避障技术可以实现对障碍物的检测和避让,从而保证设备或机器的正常运行。
红外避障技术的应用非常广泛,特别是在智能家居领域。
比如智能吸尘器、智能扫地机器人等设备都采用了红外避障技术,可以有效避免设备碰撞到家具或其他障碍物。
此外,红外避障技术还被
广泛应用于自动驾驶汽车中,可以帮助汽车避免碰撞障碍物,提高行车安全性。
除了以上的应用外,红外避障技术还可以应用于工业自动化领域。
比如在生产线上,红外避障技术可以帮助机器人或自动化设备识别障碍物,从而避免发生意外事故,提高生产效率。
总的来说,红外避障技术是一种简单而有效的技术,通过利用红外线传感器来检测障碍物并进行避让,可以在各个领域发挥重要作用。
随着科技的不断发展,相信红外避障技术会有更广阔的应用前景,为人们的生活和工作带来更多的便利和安全。
红外避障小车原理介绍及制作引言:红外避障小车是一种能够通过红外线传感器检测前方障碍物并自动转向避免碰撞的智能小车。
本文将介绍红外避障小车的原理及其制作方法。
1. 红外避障小车的原理红外避障小车通过使用红外线传感器识别前方的障碍物。
红外线传感器是一种能够发送和接收红外线信号的装置。
当红外线传感器接收到反射回来的红外线信号时,就会触发避障小车的转向动作。
2. 制作所需材料2.1 电机和轮子:用于小车的驱动和移动;2.2 Arduino控制板:用于编程和控制小车;2.3 红外线传感器:用于检测前方障碍物,并控制小车的方向;2.4 电池盒和电池:用于为小车供电;2.5 连线和焊接工具:用于连接各个组件;2.6 其他辅助材料:如螺丝、螺母等。
3. 制作步骤3.1 连接电机和轮子:首先,将电机通过导线连接到Arduino控制板上。
然后将轮子固定在电机上,确保能够顺利驱动小车移动。
3.2 安装红外线传感器:将红外线传感器连接到Arduino控制板上,确保能够准确接收红外线信号。
3.3 编写程序:使用Arduino的开发环境,编写程序以控制红外避障小车的运动。
程序的逻辑可以设计为:当红外线传感器接收到反射信号时,小车停止前进并进行转向操作,以避免碰撞。
3.4 连接电池盒:将电池盒通过导线连接到Arduino控制板上,以提供小车所需的电力。
3.5 测试运行:将程序上传到Arduino控制板上,并将电池插入电池盒中。
然后测试红外避障小车的运行情况,观察是否能够准确识别障碍物并进行避免碰撞的动作。
4. 使用注意事项4.1 红外线传感器的安装位置需要保持稳定,并且不受外界其他光源的干扰,以确保能够准确接收反射信号。
4.2 程序设计中需要考虑到红外避障小车在遇到障碍物时的反应速度及动作的平稳性,以提高小车的避障性能。
4.3 定期检查电池的电量是否充足,并及时更换电池,以保证小车的正常运行。
5. 经济和实用性分析红外避障小车的制作成本相对较低,所需材料和设备均易获取,并且拥有广泛的应用场景。
循迹避障小车原理一)小车功能实现利用光电传感(红外对射管,红外发射与接收二极管组成)检测黑白线,实现小车能跟着白线(或黑线)行走,同时也可避开障碍物,即小车寻迹过程中,若遇障碍物可自行绕开,绕开后继续寻迹。
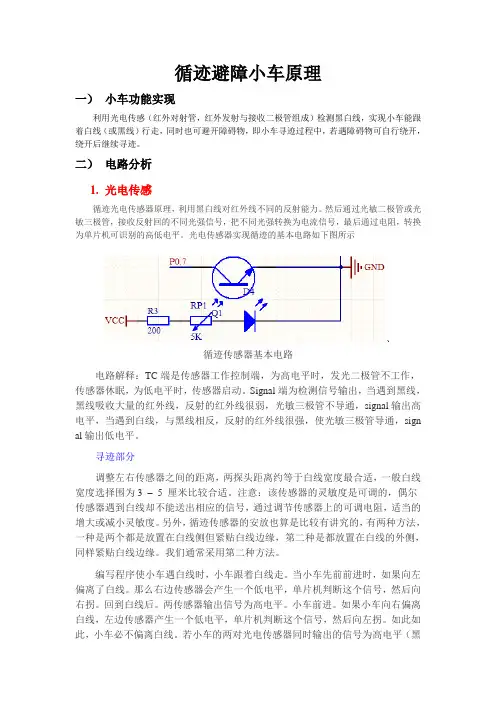
二)电路分析1.光电传感循迹光电传感器原理,利用黑白线对红外线不同的反射能力。
然后通过光敏二极管或光敏三极管,接收反射回的不同光强信号,把不同光强转换为电流信号,最后通过电阻,转换为单片机可识别的高低电平。
光电传感器实现循迹的基本电路如下图所示、循迹传感器基本电路电路解释:TC端是传感器工作控制端,为高电平时,发光二极管不工作,传感器休眠,为低电平时,传感器启动。
Signal端为检测信号输出,当遇到黑线,黑线吸收大量的红外线,反射的红外线很弱,光敏三极管不导通,signal输出高电平,当遇到白线,与黑线相反,反射的红外线很强,使光敏三极管导通,sign al输出低电平。
寻迹部分调整左右传感器之间的距离,两探头距离约等于白线宽度最合适,一般白线宽度选择围为3 – 5 厘米比较合适。
注意:该传感器的灵敏度是可调的,偶尔传感器遇到白线却不能送出相应的信号,通过调节传感器上的可调电阻,适当的增大或减小灵敏度。
另外,循迹传感器的安放也算是比较有讲究的,有两种方法,一种是两个都是放置在白线侧但紧贴白线边缘,第二种是都放置在白线的外侧,同样紧贴白线边缘。
我们通常采用第二种方法。
编写程序使小车遇白线时,小车跟着白线走。
当小车先前前进时,如果向左偏离了白线。
那么右边传感器会产生一个低电平,单片机判断这个信号,然后向右拐。
回到白线后。
两传感器输出信号为高电平。
小车前进。
如果小车向右偏离白线,左边传感器产生一个低电平,单片机判断这个信号,然后向左拐。
如此如此,小车必不偏离白线。
若小车的两对光电传感器同时输出的信号为高电平(黑底)或低电平(白底),即单片机判断的都为高电平或低电平,小车向前直走,在此过程中(直走)小车若遇白线,小车又重复上面动作跟着白线走。