三自由度并联机床控制系统设计与实现
- 格式:pdf
- 大小:1.50 MB
- 文档页数:3
并联机床的运动控制系统设计与实现随着工业技术的不断发展,机床的控制系统也在不断地更新换代。
而并联机床是近年来推广较为广泛的一种机床类型,它与传统机床相比具有更加灵活、高效等优点。
本文将重点探讨并联机床的运动控制系统设计与实现,让我们一起来了解一下。
一、并联机床的概述首先,我们需要了解并联机床的基本概念和组成结构。
并联机床即指由多个运动副组成的机床,其中每个运动副都相互独立,但又能够通过同步器实现同步运动。
它的关键组成部分包括传动机构、力传递机构、同步控制机构以及运动控制系统等。
与传统的串联机床相比,由于每个运动副都相对独立,因此并联机床更加灵活,能够同时完成多项生产任务,提高生产效率。
同时,它的运动轨迹设计非常灵活,可以根据不同的工件需求进行自由调整。
二、运动控制系统设计运动控制系统是并联机床非常重要的组成部分,它的功能是控制机床的各个运动副的运动状态,使得整个机床能够按照预定的轨迹完成所需的加工任务。
下面,我们将对运动控制系统的设计进行详细介绍。
1、控制算法的选择在设计运动控制系统时,需要确定采用何种控制算法来进行控制。
目前常见的并联机床控制算法有PID控制算法、模糊控制算法、神经网络控制算法等。
不同算法有各自的优劣势,因此需要根据实际需求进行选择。
2、动力学建模在进行控制算法设计前,需要先对并联机床进行动力学建模,建立运动副之间的运动关系,并推导出各运动副的动力学方程。
这样才能够针对不同的加工任务进行控制算法的设计。
3、控制系统硬件设计并联机床的运动控制系统硬件设计包括电机和伺服控制器的选型、功率放大器的设计、传感器的选用等。
需要根据机床的使用需求和性能要求进行选择。
4、控制系统软件设计控制系统软件设计包括编程语言的选择、控制算法的软件实现、程序调试等。
要确保软件的可靠性和稳定性,程序错误及时排除,保证机床正常运行。
特别是控制算法的软件实现,需要保证其对不同加工任务的适应性和实时性。
三、运动控制系统实现在完成运动控制系统设计后,需要进行实现。
XX( )AbstractParallel mechanism with high rigidity, strong bearing capacity, small error, high precision, small self-weight loading ratio, good dynamic performance, easy control and a series of advantages can be used as a submarine rescue docking docking device, maritime space on; the industry can be used as micro - actuator assembly machines, large precision operation; you can automatically install the wheel assembly in automobile assembly line; in addition, medical robotics, astronomical telescope, using parallel technology.The direction of the research of parallel mechanism:(1) study on the principle of parallel mechanism.The degree of freedom parallel mechanism, motion pair of calculation type, hinge type and kinematic analysis, modeling and Simulation of the.(2) for parallel mechanism workspaceIncluding the motion space analysis and simulation, the reachable workspace solution (such as numerical method, sphere coordinate searching method etc.), mechanism of interference analysis and location.(3) for parallel mechanism structure designStructure design of parallel mechanism includes many contents, such as the design of general layout, organization security mechanism.Because of my limited ability, mistakes and shortcomings in this paper can hardly be avoided, ask teachers to give the criticism and correction.Keywords three degree of freedom parallel mechanism; virtual prototype; (1)1.1 (2)1.2 (3) (6)2.1 (6)2.2 (6)2.3 (7)2.4 (8) (10)3.1 (10)3.1.1 (10)3.1.2 (10)3.2 (11)3.3 (14) (20)4.1 (20)4.1.1 (20)4.1.2 (20)4.1.3 (21)4.2 (21) (22)5.1 (22)5.1 solidworks (22)Ad ms (23)6.1 Adams (23)6.1.1 Adams (23)6.1.2 ADAMS (25)6.2 Adams (28)6.2.1 ADAMS (29)6.2.2 (29)6.2.3 (30)6.3 (33) (35) (36) (37)11.16-TPS 3 60 ±90 6CCD90 1994 Ingersoll Giddings&Lewis Hexal ”(Hexapod) ”(VARIAX) GeodeticLapik Multicraft , ETZH IFW NeosRobotics Braunschweig Sandia 1996 Hexapod 47 49 CIRP 1998 1999 CIRA ASME 25 10 TMM 1998 2000 1994 1999 21863 211 1999 61.2,(1)(2) (3)(4) ——(5) X Y Z1-1[13]1-221 30 :(1) 3(2) ,(3) ,(4)(5)(6) ,(7)(8)(9) ,21 [14-15]22.12 2 2 22.22-1[16] 2.2.1 2 3 3Kutzbach Grubler [17] Fgi if g n F 1)1(6n —g —f i — i3 Z 1 22-12.32-2 PC PC PCPC2-2PC I/O 32 PC PC 322.4Workplace CComplete workplaceConstant workplaceMaximal workplace.DDi, Di D33.13.1.123456PWM3.1.257 24V 24V4-3n=30r/min f=100HZ57BYJ250C3.24.2II III IV III IV II III IV, ,DG D1.2. 500kgf3. 94mm/s4. 800mm5.3.31. 1.4t, 150 70AE BD CF l 1m:a R =0.51m b R =0.86m AE 15 EF=ED=DF=0.75×3m=750×3mm AB=BC=AC=0.35×3m=350×3mm A ED=80°AE= 00/2/21338.57575ED AB mm COS COSAG=AEcos15°=1292.9mm(AG A )PQ=1125mm, A G=AG+150=1442.9mmtg PHQ=11251442.9PHQ=37.9°, NHQ=90°-37.9°=52.1°9800=2F QH Sin52.1° F QH =6202.5Ntg PMQ=PQ PM =11251292.9 PMQ=41°Sin PMQ=PQ PM QM=0112541Sin =1714.8mm Sin PHQ=011251831.437.9PQ QH mm QH Sin X=1831.4-1714.8=116.6mmF QH =6K 1 X K 1=6202.58.87/6116.6N mm F PN = F QH =5K 2 K 2=6202.510.6/5116.6N mm 2. 1.4t, 150 100A"G=0()70951.72ED AB tg mm tg PM Q=1125951.7PM Q=49.8°Sin PM Q=11251472.9QM mm QMX=QM-Q M =1714.8-1472.9=241.9mm14000=2FQM Sin(90°-49.8°) F QM =10769.2N K 3=10769.27.42/6241.9N mm K 4=10769.28.9/5241.9N mm 3. 1.4t 20° 851400085%=11900N11900=FQM"SinQM"J+F PN"Sin M"N"PF QM"Cos QM"J= FPN"Cos M"N"PPMQ=41° QMN=49°QM"J=40° M"N"P=60°F QM"=6040.6N FPN"=9302.5NM"O=011251292.9201100.52Sin mm M"O M" M"QO=35° M"Q=01100.51918.735mm Sin MQ=01292.91713.141mm Cos X 1=1918.7-1712.1=206.6mmF QM"=6K 5 X 1 K 5=6040.6 4.8/6206.6N mm N"P=011251961.455mm Cos X 2= N"P-PN=1961.4-1712.1=249.3mmF PN"=5K 6 X 2 K 6=6040.6 4.855249.3mm 4. 1.4t 20° 801400080%11200NF 1=5686N F 2=8756N15686947.766F N 287561751.255F N 6FCos =947.7 =10°F=160.4N=K 7 X X=1713.11713.126.410mm Cos K 7=160.4 6.08/26.4N mm 5F Cos =1751.2 =10°F =355.6N=K 8 X , X=1713.11713.126.410mm Cos K 8=355.613.5/26.4N mm44.14.1.100max min ii l l l l (i=1,2,3) l min l max4.1.20 i max (i=1,2,3)max i m i l i ( 4-1)i =cos 1 iil m l m ··4-1l i = Tiz iy ix l l l =(b i -p 'i ) (i=1,2,3), m= T z y x m m m =(p 1'-p 2') (p 2'-p 3').4.1.334.2XO B Y X 1Z j Y 1 4-2 O B Z j (Z min Z max ) i i i O B -XYZ ( i cos i i sin i Z4-2i i 0° 360° Z j Z j Z min Z max55.15.1 solidworksCAD solidworks6 Ad ms6.1 Adams6.1.1 AdamsADAMS ADAMS(Automatic Dynamic Analysis of Mechanical Systems) MDI (Mechanical Dynamics Inc.) ADAMS 1999 ADAMS 51%ADAMSADAMSADAMSADAMS 3-16-1 ADAMSADAMS ViewADAMS SolverADAMS PostProcessorADAMS/HydraulicsADAMS/VibrationADAMS/LinearADAMS/AnimationADAMS/InsightADAMS/DurabilityADAMS/DMUReplayADAMS/FlexADAMS/ControlsADAMS/ExchangeCATIA CAT/ADAMSPro/E Mechanical/ProADAMS/CarSuspensionDesignCSMADAMS/DriverADAMS/DrivelineADAMS/TireModuleFTireADAMS/FBGEDMADAMS/EngineValvetrainADAMS/EngineChainADAMS/EngineADAMS/Rail6.1.2 ADAMSADAMS/ViewADAMS/View ADAMS X-Y ADAMS/View Parasolid FORTRAN/77 FORTRAN/90 ADAMS/View 3-13-1 ADAMS/ViewADAMS/View Parasolid CAD Parasolid Parasolid 20 lntel Windows NT ADAMS/View OpenGL (ADAMS/Solver)ADAMS/Solver ADAMS ADAMS ADAMS/SolverADAMS/Solver ADAMS/Solver 30% S12 Stabilized Index 2 intergrator S12spline Translational, Revolute, Hooks, Cylindrical, Spherical, UniversalADAMS/PostprocessorMDI ADAMS/Postprocessor ADAMS/View 3-2ADAMS/Postprocessor*.gif *.jpg *.bmp *.xpm *.avi3-2 ADAMS/PostprocessorADAMS/Postprocessor ADAMS/Postprocessor ADAMS ADAMS3-3 ms6.2 Adams6.2.1 ADAMSADAMS/View ADAMS/View “Import a file” “Start in” “File Import”“File Import”6.2.2“Setting” “Gravity” “Units” Gravity “Earth Normal (-Global Y)” Units “MMKS –mm,kg,N,s,deg”ADAMS/ViewJoint: Revolute2 Bod-1 Loc Normal To Grid ADAMS/ ViewADAMS/View2 Bod-1 Loc Pick featureADAMS/ViewJoint: Fixed2 Bod-1 Loc Normal To Grid ADAMS/View .ADAMS/ViewTrans Joint Motion Speed100 100 100mmADAMS/View6.3.ms , ,,“ ” .[1] John A. Bosch. Coordinate Measuring Machines and Systems. New York: Marcel Dekker Inc. 1995,1-38[2] . [M]. 1999.[3] . [J]. 2000 11(1-2): 222-226.[4] . [J]. 1999[8] . [J]. . 1994,2: 8-13.[9] . [J]. . 1995,2: 21-24. [10] Oiwa Takaaki. Journal of the Japan Society for Precision Engineering, 1998,64(12):1791 [11] Oiwa Takaaki, et al. Journal of the Japan Society for Precision Engineering, 1999,65(2):288[12] K. Takamasu and M. Hiraki. Journal of the Japan Society for Precision Engineering, 1997,63(12):1676[13] . —— [J]. 2000 8(5):497-498.[14] Huang T et al. Closed form solution of hexapod-based virtual axis machine tools[J]. ASME J. of Mechanical Design 1999 121: 26-31.[15] . —— [J]. , 1999 10(10): 1103-1107.[16] . [J]. 2000 11(3): 252.[17] . . : 1997:18~21.37。
三自由度转台的设计与实现作者:李跃来源:《现代电子技术》2011年第17期摘要:基于MSP430F149单片机设计了一种三自由度转台系统。
在该系统中,利用旋转编码器的信息反馈,通过对电机的闭环控制,使三自由度转台能够模拟飞机的飞行姿态。
实验证明:系统能平稳、精确地按照任意给定的位置信息转动,动态性能良好,系统稳定性和抗干扰能力强。
关键词:三自由度转台; MSP430单片机;模糊控制; PID控制中图分类号:TN820.8-34 文献标识码:A文章编号:1004-373X(2011)17-0135-02Design and Realization of Three-axis TableLI Yue(Ordnance Engineering College, Shijiazhuang 050003, China)Abstract: A three-axis table based on Single-chip Microcomputer MSP430F149 is designed. In this system, using the feedback signal of Rotary Encoder and performing close-loop control of motor to make the three-axis table can imitate fly carriage of plane. The experiment confirms that the system can rotate steadily and accurately according to arbitrarily position signal, who has good dynamic state capability, stable system and strong anti-jamming capability.Keywords: three-axis table; MSP430 single-chip microcomputer; fuzzy control; PID control0 引言三自由度飞机飞行姿态模拟实验台是集机械技术、控制技术和传感器检测技术、计算机技术于一体的综合性测试设备。
全转动副三自由度并联—毕业设计说明书全转动副三自由度并联—毕业设计说明书一、绪论1.1 研究背景在工业自动化领域,被广泛应用于各种生产线上。
而全转动副三自由度并联作为一种新型结构,在高精度、高速度和高稳定性方面具有较大优势,因此备受研究者的关注。
1.2 设计目标本毕业设计旨在设计和制造一种全转动副三自由度并联,实现灵活、高效的工作模式,满足工业自动化生产线的需求。
具体设计目标如下:1) 提高的运动精度,达到亚毫米级别。
2) 提高的运动速度,达到一定的生产效率。
3) 增加的负载能力,满足不同工艺要求。
4) 提高的稳定性和可靠性,减少故障率。
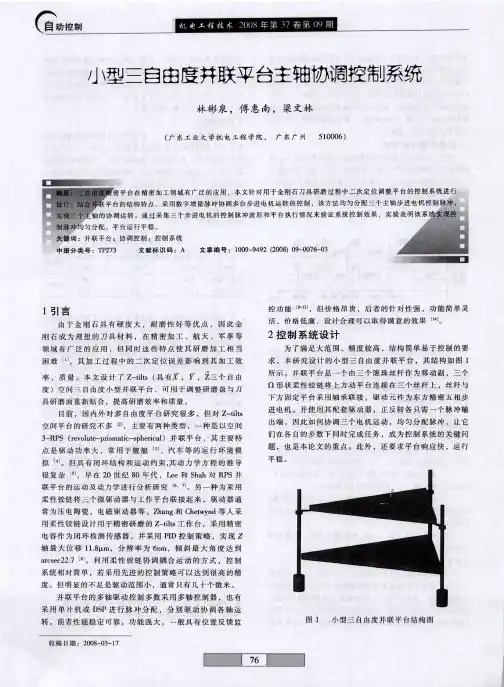
二、结构设计2.1 基本结构全转动副三自由度并联采用腰臀式结构,由主体、驱动系统、传感系统和控制系统组成。
主体包括底座、运动平台和连接机构。
2.2 运动平台设计运动平台是的核心部分,它决定了的运动自由度和力学性能。
运动平台采用球型结构,由球面、倚球杆和倚球座组成。
通过倚球杆的倾斜和球面的转动,实现的三自由度运动。
2.3 连接机构设计连接机构是主体与运动平台之间的关键部分,它连接了的各个部件并传递力矩和力量。
连接机构采用平行机构设计,由多个连杆和铰链组成,保证了机构的刚度和稳定性。
三、动力学分析3.1 运动学模型建立根据结构和运动平台的运动规律,建立了运动学模型,描述了各个自由度之间的关系。
3.2 动力学模型建立基于运动学模型,推导了的动力学模型,分析了在运动过程中的力学特性和动力特性。
四、仿真分析4.1 运动仿真利用MATLAB软件,进行了的运动仿真分析。
通过仿真结果,验证了的运动性能和稳定性。
4.2 动力学仿真利用ADAMS软件,进行了的动力学仿真分析。
通过仿真结果,了解了在不同工况下的运动状态和力学特性。
五、控制系统设计5.1 控制系统框架控制系统采用分层结构,包括运动平台控制、连接机构控制和整体控制三个层级。
每个层级都有相应的控制算法和控制器。
5.2 控制算法设计根据的运动学模型和动力学模型,设计了相应的控制算法,实现的精确运动控制和力矩控制。
三自由度并联机构控制系统研发中期报告一、研发背景三自由度并联机构是一种具有高精度、高刚度、高稳定性、高速度和高运动精度的机构,广泛应用于航空、汽车、医疗、机械制造等领域。
对于三自由度并联机构,其控制系统的设计将直接影响该机构的稳定性和精度。
因此,本项目将深入研究三自由度并联机构控制系统,设计出高效稳定的控制方案。
二、研发目标本项目的主要研发目标如下:1.设计出适用于三自由度并联机构的控制器,实现对机构的运动控制和姿态控制。
2.通过系统仿真,验证控制系统的控制效果和稳定性,包括对PID参数的优化调整。
3.结合实际机构,搭建出具有三自由度的并联机构运动控制系统原型,验证仿真结果和实际效果的相符程度。
三、研发内容1.建立机构的运动学与动力学模型,通过MATLAB/Simulink软件进行系统仿真。
2.设计PID控制器,优化控制参数,使得系统的控制效果最优。
3.结合Arduino开发板和电机驱动模块,实现对机构的运动和姿态控制。
4.针对系统中出现的问题和不足,进行控制器的优化和改进。
四、研发进展目前,我们已完成了部分研发任务,主要包括以下内容:1.基于Mechanism软件,建立了三自由度并联机构的运动学和动力学模型,并通过Simulink进行了系统仿真。
2.设计了PID控制器,使用了自适应控制算法实现对控制参数的实时调节。
3.结合Arduino开发板和电机驱动模块,实现了对机构的运动和姿态控制。
下一步,我们将继续进行实验和仿真,优化控制器设计和控制参数,以获取更为稳定和高精度的控制效果。
五、总结本项目旨在设计出适用于三自由度并联机构的控制器,实现高效稳定的机构运动控制和姿态控制。
虽然研发工作仍在进行中,但我们有信心通过持续不断的努力和改进,最终取得优异的研究成果。