1.2无阻尼自由振动 振动力学课件
- 格式:ppt
- 大小:1.37 MB
- 文档页数:62

第二章 单自由度系统的自由振动第一节 导引单自由度系统(Single —Degree —Freedom systems)是最简单的振动系统,又是最基本的振动系统。
这种系统在振动分析中的重要性,一方面在于很多实际问题都可以简化为单自由度系统来处理,从而可直接利用对这种系统的研究成果来解决问题;另一方面在于单自由度系统具有一般振动系统的一些基本特性,实际上,它是对多自由度系统、连续系统进行振动分析的基础。
所研究的振动都是微幅振动问题(微振动)。
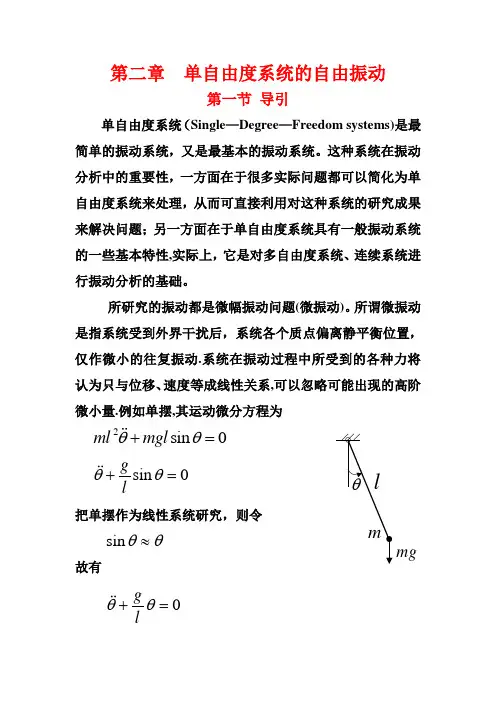
所谓微振动是指系统受到外界干扰后,系统各个质点偏离静平衡位置,仅作微小的往复振动.系统在振动过程中所受到的各种力将认为只与位移、速度等成线性关系,可以忽略可能出现的高阶微小量.例如单摆,其运动微分方程为2sin 0ml mgl θθ+=sin 0glθθ+=把单摆作为线性系统研究,则令sin θθ≈故有0glθθ+=mg第二节 无阻尼自由振动的运动微分方程及其解自由振动(free vibration )是指在外界干扰下依靠系统本身的弹性恢复力所维持的振动。
一、运动方程及其解m()k x ∆+k最简单的单自由度振动系统-----有一个质量m 和一根弹簧(弹簧的刚度系数为k ,它是弹簧每伸长或缩短一个单位长度所需施加的力,单位为Nm)组成的弹簧质量系统.弹簧原长为0l 。
当系统在没有振动时,系统处于平衡状态,称为静平衡。
此时,系统在重力的作用下产生拉伸变形∆,称为系统的静变形.由静力平衡条件有mg k =∆当系统受到外界某种初始扰动(例如用力将质量块偏离静平衡位置后突然释放,或给质量块以突然一击使之得到一个初始速度),使系统的静平衡状态遭到破坏,则弹簧力不再与重力平衡,从而产生不平衡的弹性恢复力,系统就依靠这种弹性恢复力在其静平衡位置做往复运动,称为自由振动。
建立坐标系:取静平衡位置为坐标原点,用x 表示质量块由静平衡位置算起的垂直位移,且规定x 方向向下为正。
质量块在振动过程中任一瞬时位置的受力: 不变的重力:Wmg =弹簧力 :()k x ∆+ 根据牛顿运动定律,有()mx mg k x =-∆+则有0mx kx += (2—1)单自由度无阻尼系统自由振动的运动方程. 两点讨论:(1)质量块的重力只对弹簧的静变形∆有影响,即W mg =的大小只改变质量块的静平衡位置,而不影响质量块在静平衡位置附近作振动的规律。