第七届全国大学生“飞思卡尔”杯智能汽车竞赛
- 格式:doc
- 大小:1.43 MB
- 文档页数:13

2013-2014学年浙江大学学科竞赛获奖名单一、大学生统计调查方案设计竞赛获奖名单
2.第二届浙江省大学生统计调查方案设计竞赛
二、浙江大学第二届大学生职业生涯规划竞赛获奖名单
参赛奖:
三、浙江省第三届大学生摄影竞赛作品获奖名单
四、第五届全国大学生广告设计竞赛获奖名单
五、大学生工业设计竞赛获奖名单
2.浙江大学第五届大学生工业设计竞赛
六、大学生智能汽车竞赛获奖名单
1.全国第八届大学生“飞思卡尔”杯智能汽车竞赛
2.浙江大学第七届大学生智能汽车竞赛
七、大学生节排减排社会实践与科技竞赛
八、浙江大学“天蓝杯”第八届大学生过程工程综合能力竞赛获奖名单
九、大学生英语演讲获奖名单
参赛奖名单:
十、机器人竞赛获奖名单
(1)实物组:
(3)单项奖:
4.参赛奖:
十一、浙江大学第十届大学生中文演讲竞赛获奖名单
参赛奖名单:
十二、大学生数学建模竞赛获奖名单1.2014年美国大学生数学建模竞赛
十三、大学生电子商务竞赛获奖名单
十四、大学生程序设计竞赛获奖名单
十五、大学生媒体创意竞赛获奖名单
十六、大学生电子设计竞赛获奖名单1、2013年全国大学生电子设计竞赛
十七、大学生机械设计竞赛获奖名单
1.第六届全国大学生机械创新设计大赛慧鱼组竞赛
2.浙江省第十一届大学生机械设计竞赛
3.浙江大学第十九届大学生机械设计竞赛
宁波理工学院:
十八、浙江省第十三届大学生结构设计竞赛
十九、大学生化工设计竞赛获奖名单
二十、全国周培源大学生力学竞赛
个人赛:。

机电学院第七届飞思卡尔智能车大赛策划书活动背景:在当前受金融危机的情况下,我国大学生的就业问题面临着前所未有的挑战,为我院学生能在就业上占据优势,为我院学生创造更好的就业前景,切实提高我院大学生的专业技能,顺应国家改变经济发展方式的潮流,体现节能减排的思想,更是为了全面贯彻落实“科教兴国战略”和深入实践科学发展观以及落实“十二五”规划的重要举措,从而促进我国经济又好又快发展,而举办此次活动。
活动目的:为挖掘我院学生的创新潜力,增强我院学生的合作意识,提高学生的团结协作能力,促进学生的学与用相结合,培养我们学生的动手实践能力,加强课内教学与社会产业的有效联系,加快我院校园文化建设的进程,创造良好的学习氛围,把学生的综合素质提高到更高的水平,为学生提供一个展示自己才能、展示自我的重要平台。
同时全面提升我院学生的设计及制造能力,更重要的是要通过这样的活动提升我院学生就业创业能力,进一步拓宽就业创业渠道,努力打好基础,从而为实现我国“十二五”规划的各项指标奠定基础和作出应有的贡献。
主办单位:机电学院学生工作室承办单位:机电学院团总支学生会协办单位: 机电学院学生会网络信息部活动对象:机电学院全体全日制普通本科学生活动时间:2011年5月8日~2011年7月2日活动地点:西校区室内篮球场组队规则:以团队的形式报名参赛(每队人数为3—8人)活动形式:参赛作品必须为完整的、能在规定程序的轨道上行走的智能车,由学生团队完成,要求对作品的设计思路、创新之处、这样设计的理由及其市场前景进行书面阐述。
(2500以上,可附图、表、数据等)活动内容:参加的团队可以根据自己的见解,从汽车的外形、发动机、节能、环保、智能化等方面进行自主创新设计,设计的作品最好能做到节能、环保兼顾。
活动步骤:一、赛前筹备:1、5月8日召开各班团支书会议,传达比赛的内容,要求团支书传达会议内容及相关注意事项,并积极动员班内同学踊跃参与,要求大二、大三每个班至少有两支队伍参赛;(大一的可以自由参加。
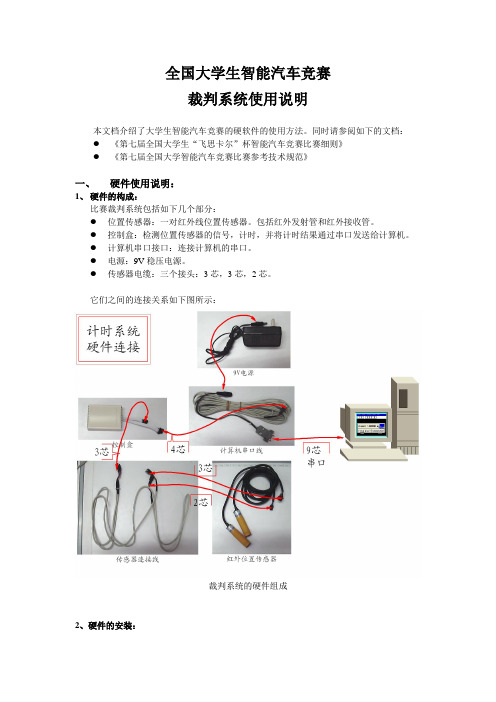
全国大学生智能汽车竞赛裁判系统使用说明本文档介绍了大学生智能汽车竞赛的硬软件的使用方法。
同时请参阅如下的文档:●《第七届全国大学生“飞思卡尔”杯智能汽车竞赛比赛细则》●《第七届全国大学智能汽车竞赛比赛参考技术规范》一、硬件使用说明:1、硬件的构成:比赛裁判系统包括如下几个部分:●位置传感器:一对红外线位置传感器。
包括红外发射管和红外接收管。
●控制盒:检测位置传感器的信号,计时,并将计时结果通过串口发送给计算机。
●计算机串口接口:连接计算机的串口。
●电源:9V稳压电源。
●传感器电缆:三个接头:3芯,3芯,2芯。
它们之间的连接关系如下图所示:裁判系统的硬件组成2、硬件的安装:(1)计算机的要求:对于计算机的硬件有两点要求:A.具有双显示卡。
在使用过程中,软件界面和结果投影显示界面需要分开,所以需要双显示卡的计算机。
建议使用笔记本计算机,因为它具可以VGA外部接口可以设置成如下扩展方式。
如下图所示:配置双显示器的桌面扩展显示模式如果使用台式计算机,要求台式计算机具有双显示卡,或者带有双输出口的显示卡。
同样也适用上面的Windows显示属性配置界面将第二个输出显示配置成为“windows 桌面开展到该监视器上”的模式。
B.具有一个串口:该串口与裁判系统中控制盒连接。
如果使用笔记本电脑,而且电脑没有串口,则可以使用如下的USB转RS232电缆来开展一个串口。
一般情况下,USB转RS232串口线需要安装驱动程序。
USB转RS232电缆记录下计算机可被使用的串口端口号,例如COM1,COM2等,这个串口在裁判系统软件中需要设置。
USB-RS232串口计算机原有串口查找系统可用的串口(2)安装赛道位置:裁判系统在安装时,将位置传感器固定在赛道起跑线的左右对称位置。
如下图所示:计时器接收管计时器发射管提前5厘米一般情况下,发射管安置在赛道的内侧,发射管的连接线从赛道的地下穿过。
使用白纸将激光发射管和接收管盖起来。

东南大学2012-2013学年本科生各类学科竞赛获奖名单公示本次公示的竞赛获奖名单为2012.7.1—2013.6.30期间在学科竞赛管理系统中认定过的72项竞赛的获奖名单,公示时间为一周(2013.10.21—10.27)。
请大家认真核实获奖情况。
如有疑问及时联系教务处实践教学科(九龙湖J5--206)。
联系人:方老师联系电话:52090233东南大学2012-2013学年本科生各类学科竞赛获奖名单一、2012年国际遗传工程机器设计竞赛(iGEM )国际级二等奖陈牧原61009110 周乐24008107 凌昕彤61009323徐小丹21010122 程鹏24008221 周醒驭04010117高珅11209216 樊雪龙11109125 桂凯02009324国际级三等奖曾胜澜11210203 赵大地11210213 张鹤11109108莫丹11210205 叶叶14410119 徐鸿博43A10239管锐11210207 胡悦11109106 王丽11109104贾正阳11209113 贾昊若61309110 韩笑61309103二、2012第37届ACM国际大学生程序设计竞赛(ACM/ICPC)亚洲区预选赛国际级三等奖田康维09010327 段宇09010129 朱铖恺22011327三、2013美国大学生数学建模竞赛国际级一等奖居晟07310104 刘兵07210104 郑吉卉08010422温韵清71110426 沈凯71110412 钱玉明71110415童舟07110121 刘晓煜07110120 何博伟09010422罗清04010646 潘培龙09010322 夏淑兰09010407黄冰瑒08010404 李睿16010420 王冬贤04010446黄骋61010311 焦德宇61010324 赵懿祺61010308邵陈希61110115 何超16010118 葛颖森08010411王红蕊04010108 刘彻04011641 何粮宇04010119任晨曦61110129 郑嘉男61110116 吕游61010111夏辛08010410 熊健08010423 黄永升08010427凌昕彤61009323 马晓琳61011210 周醒驭04010117孙丁茜07010110 胡赛61310103 杨照辉61310104国际级二等奖陶博07110128 陈子豪04010334 王嘉频04010414段淞耀21010238 陶毅02010110 闫天昊21010240王辉05510101 张旭03010322 盛洁03A10607刘林楠61010120 郭爱文61010112 强勇61010113黄威霖03210722 王迅之04010036 唐博文03010129贺正然04011516 杨普04011532 熊子瑾04011530张莹莹07110133 秦天旸07110104 朱江波07310124张玉坤61110117 汤红健61110112 章敏61110107韩晓青04010107 曹言佳04010102 张来团04010146朱迪08010205 章恒亮16010121 徐乃阳04010118秦恺华04010641 苏阳04010524 刘兆栋04010645沙小仕61010131 崔宇柯04010441 黄尔平61010221王安懿04010602 周景锦04210726 朱统晶11210229崔粟晋22010218 俞熠22010212 殷砚君22010225高天翀04010520 陈嘉文04010519 喻翔昊04010534邸明轩04010542 顾立新04010546 李峰61310113史旭超07010119 陈廷欢06010535 王悦14B10301孙天慧04210706 赵远04210725 郑俊秋21710116于海磊61010317 王伟康61010110 郝志强61010216李晓东09010222 李哲蓉09010203 钱小三09010224阎萧羽07010202 王忠波04010424 吴凯04010445邢月秀04010302 赵立成04010342 张逸驰04010344于泳波21110207 吉星21710135 吕雪冬02010207马一华04211716 白石04211725 姚艳04211707缪瑶07110123 陈天鹏07210105 朱东博07009310张弘韬10110113 李静04010109 叶庆仕08010136桂一鸣06010123 刘静06010404 朱媛媛06010405贾厦雯61010207 邵淇61010202 侯创16010131四、中国机器人大赛暨RoboCup中国公开赛(长沙赛场、合肥赛场、徐州赛场)国家级一等奖刘垚09010309 高海丹08010432 秦昕彤08010417熊健08010423 杨忠忠71110215 郑吉卉08010422李天宇12011115 黄洲荣08009316 施发斌61009325郭骎09009132 刘祥骁08009422 王晨阳08009424五、首届全国大学生金相技能大赛国家级一等奖杨涛12010323国家级二等奖张越12010427国家级三等奖李碧谕12010405六、“安吉杯”第四届全国大学生物流设计大赛国家级二等奖胡亚茜14A10208 魏征14810104 王丽芳21210202 刘湘云02610204 李树冰14810117七、第七届“飞思卡尔”杯全国大学生智能汽车竞赛总决赛国家级一等奖赵行晟08009314 徐乃阳04010118 吴昌盛08009232国家级二等奖温潇61009127 吴展鹏09010221 罗鸿飞08010220国家级优秀奖王霆213092299 王力宇02009210 杨昆04009618夏迎舟08009207 袁云辉61009111八、2012年全国大学生电子设计竞赛模拟电子系统设计专题邀请赛(TI杯)国家级一等奖张添翼04009609 王国鹏04009312 贾子昱04009221刘文04009616 李多08009112 杨彬祺04009140国家级二等奖倪蕤04009510 奚锦程06009139 童华清04009541九、第六届全国大学生结构设计竞赛国家级二等奖朱文辉05210224 周扬05110221 梅俊逸05310122十、2012年(第5届)中国大学生计算机设计大赛国家级二等奖秦艳荣04009303 王有东04009314 许佩佩04009304国家级三等奖张宏波09009225 吴舒扬09009231 陶泽杨09009233国家级优秀奖陈西17110301 吴限22010317 杨阳22010322王馥嵘25010215十一、2013年“北斗杯”全国青少年科技创新大赛国家级二等奖罗怡22010127 皇甫思怡22010107 虞洋22010227国家级优秀奖庞恩亮71110228 戴巍71110134 薛琰71110414徐美娇22010207 刘全22010314 张勇22010219十二、2012年第二届全国大学生物理实验竞赛国家级三等奖张云昊04010040 赵蓉04210708十三、第十八届中国日报社“21世纪杯”全国英语演讲比赛总决赛国家级三等奖解安琪17111115十四、2012年英特尔杯大学生电子设计竞赛嵌入式系统专题邀请赛国家级二等奖朱志青06209527 全泉06209525 奚锦程06009139 国家级三等奖陶于阳04009236 贾子昱04009221 王桂存04009225十五、第二届全国高等学校大学生测绘技能竞赛国家级三等奖胡浩21309107 李军振21309121 汤枭21309117 杨徉21309109十六、第九届中国大学莎士比亚戏剧比赛国家级优秀奖周星艺14511140 吴杨17111210 尹嘉昕17111208 林双双17111212十七、2012年全国竞赛信息安全技术专题邀请赛国家级二等奖朱文远04009313 顾实宜04009529 邱林峥04009546 国家级三等奖朱筱贇04009537 张皓月04009602 谭杭波04009315 王国鹏04009312 蓝骥04009224 王有东04009314十八、第五届全国大学生节能减排社会实践与科技竞赛国家级一等奖左文强12009308 孙畅12009303 钱宬12009406 高龙飞03108618国家级三等奖鲁洁明03109627 桑超03109628 顾阳阳03109621 陈波61109111 花亚伟61109114 李梁栋61009233十九、2012年中国教育机器人大赛国家级特等奖沈仕卿22010323 卞骁炜22010214 石然02011318 史昀珂02011402国家级一等奖李啸行05211217二十、第三届全国大学生工程训练综合能力竞赛国家级二等奖刘金肖02010428 何秋熟02010417 常文02010407二十一、第八届全国大学生交通科技大赛国家级一等奖刘善文21110129 李烨21010128 董长印21010106李方卫21110143 郑云壮21010235 罗鸿飞08010220李宸02010331国家级二等奖汤斗南21009119 王辰71110326 罗天铭21011114张美慧21009104 陈若昀21109202 宋皓雪21210111李轶超21110224 曾琳惠21210108 王剑波21210130叶力豪07210113二十二、第六届“三菱电机自动化杯全国大学生自动化大赛暨自动化系统应用竞赛国家级一等奖史博03009221 黄世芳61109107 陈波61109111王献娉01109207国家级二等奖李昌政03009437 姚洋阳61109102 孙文静03009203陆沈楠61109110二十三、第九届全国周培源大学生力学竞赛国家级特等奖刘吉05110108国家级一等奖唐皓21010231 姚浩21010222 蒋超21010224国家级二等奖魏孝胜05111415 李悠扬02010423省(部、地区)级特等奖于静巍05310101 陈邵05311116 鲁冰05111122吴吉光05110205省(部、地区)级一等奖解虎跃05310111 唐雯珍02010408 郭飞05310132郭易木21011218 岳阳2101120 3卢杨05310107罗跃建03311517 刘廷峻05111502 谢春蓉05310108黄瑞瑞05311103 周力05110301 王渊05110302汤继善02010406 袁宸61110127 何冰冰05111303陶毅02010110 胡修秀05110320 杨森05110118韩磊05111425 张良尘05111611 张诚02010332唐一萌05311118 何长林05110423 颜川奇21010113仇彤21711136 罗斯达21011113 安元旭05311111穆发利05111225 史泽清05110202 宋正华05310117省(部、地区)级二等奖周炜炜05311119 陶佳跃05310124 何雅雯05110326赵柔05111305 蒋苏童05110236 丁智霞05110327李岩峻02010327 蒋灵杰05310123 徐梓栋05111304 程轶康05110305 陈政阳21710102 陈凯05110207 凌必超05310104 王溧宜05111610 李杰21010230 严舒玮05310105 徐红燕05211201 杨轩05311124 曹青青21011207 梅丹兵21610115 周鑫05310118 韩宜丹05311101 方钊21011116 徐浩天05310116 张海平05110115 缪宏伟05111121二十四、2013年全国大学生英语竞赛国家级特等奖方晗婧04011202 黄智深10011322 程茹洁04010242 王宇阳04011345 徐倩怡04012111 戴颖61312104 国家级一等奖宓梦丹14Y11123 刘逸楠17110304 杭蕴南21410129 张宇丰21A12827 秦玉磊43A12324 傅新星04010601 吕旻21110103 王迅之04010036 徐晶61310101 国家级二等奖郑延12010411 吉星霖17110213 王倩43212207 李晓兴04011103 陆书恒61312124 杨博涵06A11109 蒋超21010224 皮晨瑶17110120 陈乐01A10526 陈丽君13411116 赵俐丽07010205 周于浩61313113 薛原21411101 左雯14C11528 王天宜16012307 刘奇10010307 张苑04012306 黄群07110115 宋卉61012202 徐健男09010310 吴巧14C12605 吴姝悦21A12308 仇晓逢71112332 张一楠17111315 张睿14B12509 曾兰淳61312103 张慧21A12601 董夏鑫21A12125 王烁71112330 徐依斓17111304 郑玉冰21710128 吴梓芊43A12110 周禹08012117 国家级三等奖张雯露09011206 冯夏雨61012204 韩鹏16010234 李越04012134 孙园园43212402 张晓赫21110237 夏冬71112234 杨启凡71112331 张博涵01A12125 王颂成19010214 蔡韵雯21A12301 汤静21110116 刘芳硕04011214 王雅倩21A12509 韩旭05712104 于婷17110218 梁爽14B12315 蒋丽怡07310130 张倩21010124 夏萌17110215 林秦怡17111105 吴广臣13210127 邵茜14C12206 李群12010406 庄浩宇61312127 邵韵芸17112113 周杰21010228 陶朦09011201 史航宇61010305 金城05712108 石煜14C12606 张健06211627 李嘉鹏06211613 王聃权19012113 汪政扬04011248 黄心怡71110308 张小梦21310123 王禹欣61012303 陈希云14B10115 邓金凌43A12304 孙小桐17110302 居晟07310104 刘婉莹05511131 李茵71112301 赵楠楠04012304章茵21010203 曹嘉璐17111205 白岚61312101 许卓颐07012209 张波17111209 钱燕03011417 曹屹21010225 王静怡17111313 张翎影04010206 贡怡敏14C12406 姜秀夫04012518 杨杨05111236 李牧原14B12307 黄谢田19012302 牟吉宁04011114 王似佳21110102 张如04011206 刘策04011648 王越14C11526 顾潼71111411 梁将08010311二十五、2012全国大学生数学建模竞赛国家级二等奖崔宇柯04010441 沙小仕61010131 黄尔平61010221 陈琦61010105 张婷婷61010101 季杭为61010215 张莹莹07110133 秦天旸07110104 朱江波07310124 居晟07310104 周鹏程07310121 郑吉卉08010422 王文捷11210109 薛诗静11110114 单洁玲11110110 刘全22010314 徐美娇22010207 刘石劬22011231 王红蕊04010108 刘彻04011641 何粮宇04010119 省(部、地区)级一等奖顾俊逸04010335 陈明16010518 王淑君16010406 李晓东09010222 钱小三09010224 李哲蓉09010203 马徐骏04010226 朱玲燕04010203 祖俊婕04010207 罗清04010646 潘培龙09010322 夏淑兰09010407 省(部、地区)级二等奖任晨曦61110129 吕游61010111 郑嘉男61110116 于泳波21110207 吕雪冬02010207 吉星21710135 段淞耀21010238 闫天昊21010240 冯源08010135 孙天慧04210706 郑俊秋21710116 赵远04210725 黄骋61010311 赵懿祺61010308 焦德宇61010324 高天翀04010520 陈嘉文04010519 韩东洪04010516 郭立勇06010410 朱媛媛06010405 刘静06010404 陈凌蛟61311125 冯士睿61010315 沈治恒61010319 省(部、地区)级三等奖刘晓煜07110120 童舟07110121 刘兵07210104 马一华04211716 姚艳04211707 白石04211725 刘志成04010642 孙望舒11110137 王安懿04010602 毛丁益16010218 江溯帆16010233 李大可16010217 刘浩波08010112 黄健翔08010124 张虹08010301 党一菲09010428 吴程熙09010404 王文佳04011607 刘林楠61010120 郭爱文61010112 强勇61010113 孙丁茜07010110 殷浩楠06010214 万弃寒61010130 刘泽恒06011315 吴东昊03011327 何冰冰05111303 王辉南04010515 冯文华04010408 顾育嘉04010304 于海磊61010317 郝志强61010216 王伟康61010110 叶庆仕08010136 刘奇10010307 张弘韬10110113窦建青61010309 金春蓉61010307 贲有成71110109 李少冉61010220 唐伟佳61010201 周晓慧61010212 高晶04210707 郑超04210729 胡定禹04010241 崔粟晋22010218 俞熠22010212 殷砚君22010225 孙琛16010207 黄晓林16010228 韩鹏16010234 温韵清71110426 沈凯71110412 钱玉明71110415二十六、2012年“外研社杯”全国英语演讲(江苏赛区)大赛省(部、地区)级二等奖解安琪17111115 姜秀夫04012518省(部、地区)级三等奖张先汉07012227二十七、第五届江苏省工科院校先进制造技术创新制作比赛省(部、地区)级一等奖桂凯02009324 杨松松02009330省(部、地区)级二等奖蔡君丞02009323 陈华宇02009325 林元载02009525二十八、2012年江苏省土木工程大学生结构创新竞赛省(部、地区)级一等奖强翰霖05111229 王谆05111334 曹徐阳05111233 省(部、地区)级二等奖夏定风05111330 杨帆05111605 臧芃乔05111606 杜佳贇01A10124 黄坤01110118 周雅05A10225 张凡05110532 李瑞琪05110509 宋松涛05110315 潘漾05110137 陈钊05110515二十九、第七届全国信息技术应用水平大赛(江苏赛区)省(部、地区)级二等奖陈佳骐02010117 朱锐04011647 戴巍71110134 张哲22010318 金弘晟06211618 柳雨新22010121 钱澄06211620 庞恩亮71110228 刘天琴22010101 李飒22010302省(部、地区)级三等奖吴张佳妮03110602 朱铖恺22011327 张逸驰04010344 林元载02009525三十、第二届省普通高等学校大学生化学化工实验竞赛省(部、地区)级一等奖赵祥玉19309107 彭静19109104 陈艺新19109203 省(部、地区)级二等奖李立雄19109219 施键水19109210 钱坤19309109三十一、第九届华东地区高校“伟宏钢构杯”结构设计邀请赛省(部、地区)级优秀奖季小泉05110218 於恒05110130 武玉琼05110211三十二、第二届江苏省大学生工程训练综合能力竞赛省(部、地区)级一等奖刘金肖02010428 何秋熟02010417 常文02010407谢许宁02010425 张经辉02010426 罗国海02010422朱智勇02010403 唐雯珍02010408省(部、地区)级三等奖郗浩杰02010226 库后涛02A10623 罗利平02010211三十三、第十八届中国日报社“21世纪·可口可乐杯”全国英语演讲比赛江苏地区决赛省(部、地区)级特等奖解安琪17111115省(部、地区)级一等奖陈抒涵17110317三十四、第三届“浩辰杯”华东区大学生CAD应用技能竞赛省(部、地区)级一等奖陈佳骐02010117 陶毅02010110 徐振东02010405钟天铖02010404 戴嘉熙01111126省(部、地区)级二等奖周啸天02010303 韩承志02010113 王虎02010427省(部、地区)级三等奖朱峰冰02011410 周杰21010228 贾泽华03010516三十五、江苏省高校第九届大学生物理及实验科技作品创新竞赛省(部、地区)级一等奖陈晓61311107 周琪羽22009312 张兆杭19009131谭艺洋22009320 杨晨熙22009322 张俪园22009203省(部、地区)级二等奖林伟坚10009326 徐凯10009321 韩立功61010115林海10009317 季程10009320 汤智超16010607刘瀚16010621 彭冲16010624省(部、地区)级三等奖刘瀚16010621 周晓飞16010519 展东剑16010527张天22010204 张靓22010206 宗伟康22010216虞洋22010227 胡史奇10011307 王鑫14B11401省(部、地区)级优秀奖戴巍71110134 庞恩亮71110228 张骏71109232桂一鸣06010123 徐啸06010132 张骁彬06010130李畅06010431三十六、江苏省第四届大学生机械创新设计大赛省(部、地区)级一等奖艾青02009503 付建新02009326 李晨昊16009326 林元载02009525省(部、地区)级二等奖江铖02008133 韩雪颂14210142 夏本清14610111 张晓波02008130 何泽02008102 胡海桦22008225 韩晔珍22008205 朱碧玉22009309 李松22009319 刘露露22009207省(部、地区)级三等奖陈丹凤22008304 倪得晶22008401 许胜东22009138 刘弘逸22008410 梁佳琪22011210三十七、第七届“飞思卡尔”杯全国大学生智能汽车竞赛华东赛区省(部、地区)级一等奖温潇61009127 吴展鹏09010221 罗鸿飞08010220 赵行晟08009314 徐乃阳04010118 吴昌盛08009232 童华清04009541 陈洋洋04009437 杨彬祺04009140 吴里程06009315 刘玮04209716 阳赛04010326 省(部、地区)级二等奖顾阳阳03109621 夏迎舟08009207 赵安晓04009628三十八、2012年江苏省大学生电子设计竞赛省(部、地区)级一等奖王国鹏04009312 蓝骥04009224 王有东04009314 张晓燕04009137 杨彬祺04009140 苏菲04009203 付宇鹏04010126 李易04010134 刘悦晨09009419 倪蕤04009510 顾馨月04009543 蒋伟04009632 刘文04009616 张添翼04009609 赵安晓04009628 孙天慧04210706 赵蓉04210708 林桂石04210736 徐正港04010132 蔺蓓04010138 周平04010135 宗伟康22010216 刘畅22010213 谢雨蒙22011209 王许莲04009608 颜丽颖04009603 奚锦程06009139 胡赛61310103 葛中鹏61310107 徐晶61310101 陈牧云04009103 李多08009112 刘兆栋04010645 王红蕊04010108 杨照辉61310104 郭谦61010322 吴珏蓉04009106 贾子昱04009221 陶于阳04009236 省(部、地区)级二等奖陈子豪04010334 王嘉频04010414 潘晓青04010205 黄洲荣08009316 黄飞燕08009301 尤卫卫08009205 童华清04009541 陈洋洋04009437 刘玮04209716 张博天04010149 洪旸04010217 金晶04010240 苏畅06010230 翁俊杰06010127 吴凯06010226 孙文昭06209529 徐耘06209513 姚群06209530彭富林06010432 梁振楠06010509 吴丹06010305陈怀昊06010229 顾一帆06010232 封倩倩06010238梁凌轩61009120 张益成61009106 刘灿61009126梅茂奎04009413 王奇04009409 陈诗雨04009436孙觉非22009125 王正俊22009135 唐建22009224黄利敏16010109 高春16010127 张剑楠16010209刘飞非04009526 余士喜04009528 顾实宜04009529孙正04010328 黄舒夏04010306 董启宏04010330沈兵06010117 廖振星06010322 张馨月06010503胡翔16010422 郑嘉琪16010103 王炜波16010417张云昊61010316 谢宏祥61010124 陈琦61010105吉宇06009236 钱煦06009141 徐高伟06009437李峰灯04209715 董云扬04009109 王淑朋04009141三十九、东南大学第一届金相实验技能竞赛(见校机教〔2012〕135号)校级一等奖李碧谕12010405 等 3 人校级二等奖陈瑞兴12010314 等8 人校级三等奖徐全平12009123 等13 人校级优秀奖邵灵芝02010111 等8 人四十、东南大学第十届机械创新设计竞赛(见校机教〔2012〕144号)校级一等奖黄志昊02009217 等 6 人校级二等奖李晓东02009121 等8 人校级三等奖杨奕峰02009531 等12 人校级优秀奖吕树鹏02009524 等10 人四十一、东南大学第五届大学英语研究型课程十佳团队竞赛(见校机教〔2012〕168号)校级一等奖覃若曦14C11209 等 4 人校级二等奖沈晓08011315 等10 人校级三等奖张烁10211114 等31 人校级优秀奖克拉普14C11280 等 4 人四十二、东南大学本科生第六届PLD设计竞赛(见校机教〔2012〕171号)校级一等奖彭富林06010432 等9 人校级二等奖翁俊杰06010127 等18 人校级三等奖顾俊逸04010335 等26 人校级优秀奖王帆22010123 等12 人四十三、东南大学第三届智能信息处理系统软件设计竞赛(见校机教〔2012〕181号)校级特等奖徐乃阳04010118 等 3 人校级二等奖赖少发08010232 等 5 人校级三等奖刘文04009616 等 3 人校级优秀奖韩建军04010243 等11 人四十四、东南大学第九届RoboCup机器人竞赛(见校机教〔2012〕182号)校级一等奖徐奔08010117 等15 人校级二等奖邸明轩04010542 等24 人校级三等奖陈彤09010308 等35 人校级优秀奖吕金其03010419 等72 人四十五、东南大学第三届大学物理课程研究论文竞赛(见校机教〔2013〕31号)校级一等奖韩立功61010115 等 2 人校级二等奖赵梦珍21110112 等 5 人校级三等奖黄映坡04210705 等9 人四十六、东南大学第五届节能减排社会实践与科技创新竞赛(见校机教〔2013〕45号)校级一等奖郭思奇03010112 等9 人校级二等奖金圣03011311 等18 人校级三等奖章广祥03010504 等24 人校级优秀奖王旭冲16010222 等25 人四十七、东南大学第三届创新体验竞赛(见校机教〔2013〕49号)校级特等奖刘申阳09010411 等 4 人校级一等奖岳磊19111114 等56 人校级二等奖毛安琪14511125 等110 人校级三等奖郭少雄16011220 等152 人校级优秀奖鲁鑫05111420 等182 人四十八、东南大学第二届遗传工程机器设计竞赛(见校机教〔2013〕50号)校级一等奖邹昕11A11110 等7 人校级二等奖顾晓卉11A12207 等9 人校级三等奖周雯婷11A11111 等9 人校级优秀奖吴至榛04011451 等 4 人四十九、第五届“中华赞”经典诵读竞赛(见校机教〔2013〕52号)校级一等奖王希05311128 等25 人校级二等奖刘瑞媚03A10202 等47 人校级三等奖聂唱41112106 等56 人校级优秀奖童瑶21210127 等60 人五十、东南大学2013年第十五届电子设计竞赛(见校机教〔2013〕61号)校级一等奖周晓慧61010212 等33 人校级二等奖范栋琛16011210 等48 人校级三等奖周模量04010632 等93 人校级优秀奖黄杰22010334 等81 人五十一、东南大学第七届大学生智能车竞赛(见校机教〔2013〕62号)校级一等奖袁峻08010118 等18 人校级二等奖孙朝03010527 等33 人校级三等奖甘子伦16011223 等48 人校级优秀奖程茹洁04010242 等63 人五十二、2013年东南大学大学生英语竞赛(见校机教〔2013〕75号)校级一等奖周慕菁04210715 等19 人校级二等奖廖南楠21010129 等42 人校级三等奖魏震楠04012127 等86 人五十三、东南大学第十届视觉制导机器人竞赛(见校机教〔2013〕83号)校级一等奖孙朝03010527 等11 人校级二等奖孟义军02A11729 等24 人校级三等奖黄利敏16010109 等34 人校级优秀奖郑如生03011409 等70 人五十四、东南大学第六届IEEE标准电脑鼠走迷宫竞赛(见校机教〔2013〕93号)校级一等奖郭思奇03010112 等12 人校级二等奖李松22009319 等29 人校级三等奖黄鑫08010211 等38 人校级优秀奖倪立航03010210 等55 人五十五、东南大学第三届大学生CAD技术应用竞赛(见校机教〔2013〕94号)校级一等奖贾泽华03010516 等11 人校级二等奖俞斌02010201 等21 人校级三等奖夏天阳05111418 等32 人校级优秀奖姚懿航02010416 等41 人五十六、东南大学第三届医学本科生临床技能竞赛(见校机教〔2013〕95号)校级特等奖周兆明43208421 等 3 人校级一等奖薛明43208101 等 6 人校级二等奖徐仲林43208119 等9 人校级三等奖凌志新43208417 等12 人校级优秀奖夏笑笑43108242 等12 人五十七、东南大学第十二届结构创新竞赛(见校机教〔2013〕102号)校级一等奖王谆05111334 等45 人校级二等奖李舒欣05A12602 等93 人校级三等奖黄家豪05111537 等138 人校级优秀奖马体05111536 等183 人五十八、东南大学第五届英语演讲竞赛(见校机教〔2013〕105号)校级一等奖赵启眉17112210 等 2 人校级二等奖吴杨17111210 等 5 人校级三等奖杨佳丽10110126 等14 人五十九、东南大学第六届嵌入式系统设计竞赛(见校机教〔2013〕117号)校级一等奖郭立勇06010410 等9 人校级二等奖王芳06010138 等18 人校级三等奖张琰04011446 等18 人校级优秀奖邱晔鹏61010223 等13 人六十、东南大学本科生第七届数学建模竞赛(见校机教〔2013〕118号)校级一等奖曹佩哲09011114 等57 人校级二等奖王灿16011110 等87 人校级优秀奖郑先臣07311105 等240 人六十一、东南大学第九届大学生程序设计竞赛(见校机教〔2013〕119号)校级一等奖赵隐达04012626 等 6 人校级二等奖陈星宇71111216 等11 人校级三等奖程耘61012117 等17 人校级优秀奖高子豪71111116 等 4 人六十二、东南大学第九届本科生物理实验研究论文竞赛(见校机教〔2013〕120号) 校级一等奖郑祥杰16011224 等 6 人校级二等奖江平02011409 等17 人校级三等奖林松02A11329 等19 人校级优秀奖宋璇14B12106 等122 人六十三、东南大学本科生2013年高等数学竞赛(见校机教〔2013〕121号)校级一等奖黄子文10012206 等10 人校级二等奖王位极05A12615 等23 人校级三等奖韩彬12012311 等28 人校级优秀奖陈玉辰61012203 等41 人六十四、东南大学第十一届机械创新设计竞赛(见校机教〔2013〕122号)校级一等奖张经辉02010426 等9 人校级二等奖陈佳骐02010117 等9 人校级三等奖琚安建02010414 等16 人校级优秀奖解正康02010318 等17 人六十五、东南大学第五届大学生计算机设计竞赛(见校机教〔2013〕137号)校级一等奖张琰佳03010532 等 3 人校级二等奖惠允22010105 等 6 人校级三等奖薛琰71110414 等7 人校级优秀奖金天翼71110210 等10 人六十六、东南大学第三届交通科技竞赛(见校机教〔2013〕145号)校级一等奖蒋继望21710120 等9 人校级二等奖李方卫21110143 等18 人校级三等奖汤斗南21009119 等27 人校级优秀奖朱展21710230 等33 人六十七、东南大学第四届本科生广告艺术竞赛(见校机教〔2013〕152号)校级一等奖孔笛24010108 等 4 人校级二等奖罗友斌24A10123 等8 人校级三等奖吴怡凡24A11110 等8 人校级优秀奖许文娴24010107 等11 人六十八、东南大学第三届可编程序控制器设计竞赛(见校机教〔2013〕xxx号)校级特等奖袁宸61110127 等 1 人校级一等奖吴苏晨03010406 等 1 人校级二等奖何成洋03010427 等 2 人校级三等奖陈超61110111 等 3 人校级优秀奖冯其旺03010328 等 4 人六十九、东南大学第七届力学竞赛(见校机教〔2013〕xxx号)校级一等奖陈邵05311116 等14 人校级二等奖陶佳跃05310124 等27 人校级三等奖曾强05311130 等42 人校级优秀奖夏定风05111330 等27 人七十、东南大学第一届本科生物流设计竞赛校级一等奖袁伟翔21210124 等 5 人校级二等奖范玉瑶14810111 等 5 人七十一、第一届东南大学医学院本科生科研设计大赛院(系)级一等奖李娜43210212 等30 人院(系)级二等奖舒钊彻43A10127 等62 人七十二、2013年“北斗杯”全国青少年科技创新大赛东南大学选拔赛院(系)级一等奖惠允22010105 等13 人教务处实践教学科二〇一三年十月二十一日。

哈尔滨工业大学航模协会简介:哈尔滨工业大学航模协会成立于1990年10月,现隶属于航天学院。
她是以“丰富学生文化生活、浓厚校园航天气氛”为宗旨,以普及航天知识,弘扬航天精神为目的的学生科技类社团。
二十年来,航模协会在探索中一步步走向成熟,在一代代航协人的努力下已发展成为集竞赛、科研、表演于一体的多元化社团。
今年10月我们在山东莱芜举办的科研类“全国航空航天模型锦标赛”上与清华、北航、南航等30多所高校同台竞技,在直升机项目上力克北航等高校,包揽了个人前三名,取得了个人“冠亚季”军和团体“冠军”的好成绩。
我们还积极开展航模创新活动,许多成员以此为平台,多次在国家级和校级科技创新评比中获得佳绩。
1995年起,我们在每年校运动会上为全校师生献上精彩的航模表演。
2008年末,我们更是为大冬会的圣火采集做出了突出贡献。
2009年起,我们还在每学期举办小飞机比赛、静态模型制作等系列品牌活动。
航模协会发展至今,已拥有过硬的基础设施,健全的组织机构,严格的管理制度和雄厚的技术实力。
我们设有直升机部——开展直升机的飞行练习,承担航模锦标赛模拟搜救项目的训练以及抓取装置的设计制作;固定翼部——开展滑翔机的制作、训练等活动以及重型固定翼飞机结构的研制工作;火箭部——以制作、发射表演模型火箭为主,同时开展模型火箭制导的相关研究工作。
同时协会还有车辆模型和静态模型小组,给你带来丰富的模型体验。
在学校和航院领导的大力支持下,协会蓬勃发展,我们呼吁人才。
所以,不管你是否有航模基础,也无论你来自什么专业,更不要在乎自己是男生或女生,请不要担心你的才华在这里得不到施展,只要你对航模感兴趣,肯坚持,真心想学习,航模大家庭时刻欢迎你的到来。
赛扶团队简介:哈尔滨工业大学赛扶团队6月“点将”是基于团队对未来部门及项目管理人才的渴求,专门为希望未来成为团队高级管理人才的团队队员设计的发展计划,目标是挑选出最优秀的人才,给予他们最大的机会和挑战,使他们以最快的速度,发展成为下一年度赛扶团队的骨干力量。
第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直立行车参考设计方案(版本2.0)目 录目录 (2)图表索引 (3)一、前言 (7)二、原理篇 (9)2.1直立行走任务分解 (9)2.2车模直立控制 (11)2.3 车模角度和角速度测量 (19)2.3车模速度控制 (26)2.4车模方向控制 (33)2.6车模直立行走控制算法总图 (36)三、电路设计篇 (37)3.1整体电路框图 (37)3.2 DSC介绍与单片机最小系统 (39)3.3倾角传感器电路 (42)3.4电机驱动电路 (44)3.5速度传感器电路 (45)3.6电磁线检测电路 (46)3.7 角度计算电路 (50)3.8 车模控制电路全图 (55)四、机械设计篇 (57)4.1车模简化改装 (57)4.2传感器安装 (59)4.3注意事项 (63)五、软件开发篇 (64)5.1软件功能与框架 (65)5.2 DSC的硬件资源配置 (68)5.3主要算法及其实现 (69)六、车模调试篇 (82)6.1 调试参数 (82)6.2调试条件 (85)6.3 桌面静态参数调试 (91)6.4 现场动态参数调试 (101)6.5 方案改进与车模整体水平提高 (101)七、结束语 (102)附录: (103)图表索引第一章图1- 1 电磁组车模直立运行模式 (7)图1- 2参考设计方案内容 (8)图1- 3 车模制作路线图 (9)第二章图2- 1 车模控制任务分解 (10)图2- 2 车模倾角会引起车速速度变化 (10)图2- 3 三层控制之间相互配合 (11)图2- 4 保持木棒直立的反馈控制 (12)图2- 5 通过车轮运动保持车模直立 (12)图2- 6 车模简化成倒立的单摆 (13)图2- 7 普通单摆受力分析 (13)图2- 8 不同阻尼力下的单摆运动 (14)图2- 9 在车轮上的参照系中车模受力分析 (14)图2- 10 车模控制两个系数作用 (16)图2- 11 车模运动方程 (16)图2- 12 加入比例微分反馈后的系统框图 (17)图2- 13 电机在不同电压下的速度变化曲线 (18)图2- 14 加速度传感器原理 (19)图2- 15 MMA7260三轴加速度传感器 (20)图2- 16 车模运动引起加速度信号波动 (21)图2- 17 实际测量MMA7260Z轴信号 (21)图2- 18 车模运动引起加速度Z轴信号变化 (22)图2- 19角速度传感器及参考放大电路 (22)图2- 20 角速度积分得到角度 (23)图2- 21 角速度积分漂移现象 (23)图2- 22 通过重力加速度来矫正陀螺仪的角度漂移 (24)图2- 23 双加速度传感器获得车模角加速度 (25)图2- 24 角度控制框图 (25)图2- 25 电机速度检测 (26)图2- 26 车模倾角给定 (27)图2- 27 车模倾角控制速度中的正反馈 (28)图2- 28 车模倾角控制分析 (29)图2- 29 车模运动速度控制简化模型 (29)图2- 30 增加微分控制后的系统 (30)图2- 31 改进的微分控制 (30)图2- 32 车模角度和速度控制框图 (31)图2- 33 速度角度控制方案的改进 (32)图2- 34 改进后的速度和角度控制方案 (32)图2- 35 检测道路中心电磁线方式 (33)图2- 36 通过电机驱动电压的差动控制控制车模方向 (34)图2- 37 检测车模转动速度的陀螺仪 (34)图2- 38 电感线圈的偏角影响感应电动势 (35)图2- 39 车模方向控制算法 (35)图2- 40 车模运动控制总框图 (36)第三章图3- 1 直立车模控制电路整体框图 (39)图3- 2 56F8013内部资源示意图 (40)图3- 3 F8013最小系统电路 (41)图3- 4 F8013最小系统电路实物 (42)图3- 5 陀螺仪、加速度传感器电路 (43)图3- 6 车模倾角传感器电路实物图 (43)图3- 7 双电机驱动电路 (44)图3- 8单极性PWM、双极性PWM (45)图3- 9 两片33886组成的电机驱动电路 (45)图3- 10 速度传感器电路 (46)图3- 11 基于三极管的电磁信号放大检波电路 (47)图3- 12 基于三极管的电磁放大检波电路实物图 (48)图3- 13 使用R-R运放进行电磁信号放大检波 (49)图3- 14 LMV358放大检波输出波形 (49)图3- 15 基于LMV358放大检波电路实物图 (50)图3- 16 双加速度测量角速度电路 (51)图3- 17 双加速度计测量角度波形图 (51)图3- 18 简化角速度电路 (52)图3- 19 实测车模角速度信号波形 (52)图3- 20 角度信号处理电路 (53)图3- 21 不同角速度比例情况下输出波形 (53)图3- 22 角度计算环节的传递函数 (54)图3- 23 一个运算放大器实现角度计算 (54)图3- 24 不同P1阻值对应的输出波形 (55)图3- 25 简化的角度和角速度处理电路 (55)图3- 26 车模控制电路全图 (56)第四章图4- 1 完整的C型车模底盘 (57)图4- 2 简化后的C型车模底盘 (57)图4- 3 使用热熔胶固定电机支架与车模底盘 (58)图4- 4 去掉后轮之后的车模底盘 (58)图4- 5 电机引线转接板 (59)图4- 6 使用复合胶水固定光电编码盘 (59)图4- 7 固定好的光电码盘和光电检测管 (60)图4- 8 电磁传感器支架 (61)图4- 9 车模组装全图 (64)第五章图5- 1 主程序框架 (65)图5- 2 中断服务程序 (66)图5- 3 任务中断时间波形 (67)图5- 4 算法框图中与控制相关的软件函数 (70)图5- 5 控制函数调用与参数传递关系 (71)图5- 6 程序中变量命名规范 (72)图5- 7 电机死区补偿 (78)第六章图6- 1 调试车模参数复杂而关键 (82)图6- 2 需要调整的参数和相关的单位 (84)图6- 3 车模运动坐标定义 (85)图6- 4 电源检查 (86)图6- 5 单片机串口通信 (86)图6- 6 PWM信号输出 (87)图6- 7 采集电机光电码盘信号 (87)图6- 8 陀螺仪、加速度传感器AD采集信号 (88)图6- 9 车模静态参数调整桌面 (88)图6- 10车模动态参数调试场地 (89)图6- 11 监控软件界面 (89)图6- 12 无线遥控开关 (90)图6- 13 无线通信模块进行参数监控 (90)图6- 14 F8013内部FLASH应用划分 (91)图6- 15 需要整定的传感器参数 (91)图6- 16 车模保持垂直静止 (92)图6- 17 测量加速度传感器的极值 (92)图6- 18测量陀螺传感器比例因子,角度补偿回路断开 (93)图6- 19 几种不同陀螺仪比例因子角度输出 (94)图6- 20 车模控制参数 (95)图6- 21 角度参数调整过程 (96)图6- 22 速度参数调整过程 (97)图6- 23 方向参数调整过程 (98)图6- 24 角度补偿时间常数调整 (99)图6- 25 Z轴附加信号分析 (100)图6- 26 死区常数调整 (100)附录图7- 1 参考设计方案视频截图 (103)图7- 2 参数整定与调试指南 (104)图7- 3 软件控制算法全图 (106)图7- 4 参考方案电路全图 (107)第一章、前言为了提高全国大学生智能汽车竞赛创新性和趣味性,激发高校学生参与比赛的兴趣,提高学生的动手能力、创新能力和接受挑战能力,智能汽车竞赛组委会将电磁组比赛规定为车模直立行走,如图1- 1所示。
第七届全国大学生“飞思卡尔”杯智能汽车竞赛技术报告学 校: 兰州交通大学队伍名称: 神舟1号参赛队员: 齐威 许明龙 韦鹏带队教师: 姜香菊 路小娟关于技术报告和研究论文使用授权的说明本人完全了解第七届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
摘要本文介绍了在准备第七届“飞思卡尔”杯全国大学生智能汽车竞赛过程中“神舟1号”的队员们的设计工作。
硬件平台采用K60系列微控制器作为系统控制处理器,以大赛组委会统一规定的A型车模为系统车模,主要的控制对象为转向舵机和驱动电机,软件的调试平台采用Keil MDK进行软件开发,并用Visual C++6.0开发了智能车上位机进行辅助调试。
文中介绍了智能小车控制系统的软硬件结构和开发流程。
整个系统涉及车模机械结构调整、单片机控制电路的设计、摄像头图像信号的处理、车模控制算法和控制策略优化等多个方面。
为了提高智能车的行驶速度和稳定性,借助蓝牙串口技术进行上下位机通信,经过大量的底层调试和上层仿真,最终确定了现有的系统结构和各项控制参数。
关键词:智能车;摄像头;图像处理AbstractThis article describes the results of the Shenzhou1 players’ work in the process of preparing the seventh Freescale smart car Competition.The system uses the K60 series microcontroller to control the motor and steering servos to uniform provisions of the Competition Organizing Committee for Model A car. Keil MDK software platform is used to debug software and monitoring software platform developed by VC 6.0 to debug the system.The hardware and software architecture and development process of the intelligent car control system are introduced in the paper. The whole system includes car model mechanical structural adjustment, microprocessor control circuit design, the camera image signal processing, control algorithms and optimal strategies and other aspects. In order to improve the speed and stability of the intelligent car, the upper and lower computer communication is completed with the Bluetooth serial port technology. Ultimately the system structure and the control parameters are determined after a large number debugging and simulation.Key words: smart car, Camera, Image Processing目录摘要 (I)Abstract (II)目录 (I)第一章引言 (1)第二章硬件设计 (2)2.1 系统硬件结构 (2)2.2 机械结构 (2)2.2.1 摄像头定位 (3)2.2.2 前轮机械 (4)2.2.3 舵机的安装 (4)2.2.4 重心调整 (5)2.3 电路设计 (6)2.3.1 单片机稳压电路 (7)2.3.2 摄像头稳压电路 (7)2.3.3 舵机稳压电路 (8)2.4 电机驱动设计 (8)2.5 其他辅助电路 (9)2.5.1 摄像头接口电路 (9)2.5.2 驱动隔离电路 (9)第三章软件设计 (10)3.1 系统软件结构 (10)3.1.1 系统软件结构 (10)3.1.2 主程序程图 (10)3.2 最佳路线识别算法 (11)3.2.1 算法的主要步骤 (12)3.2.2 最佳路径的确定 (13)3.2.3 基于特征点的最佳路径多分辨率融合 (14)3.3 图像去噪 (15)3.4 赛道识别 (15)3.5 电机控制 (19)3.6 舵机控制 (20)第四章调试与性能分析 (22)4.1 开发平台 (22)4.2 调试分析 (22)4.3 上位机图像仿真 (23)第五章赛车主要技术参数 (25)第六章总结 (26)第七章致谢 (27)参考文献 (28)附录A 总体电路的PCB板设计图 (I)附录B 程序代码 (II)第一章引言本文详细介绍了为第七届“飞思卡尔”杯全国大学生智能汽车竞赛而准备的智能车系统方案。
第七届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分(省)赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定,参加全国总决赛的队伍同时必须提交车膜技术报告。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过感应由赛道中心电线产生的交变磁场进行路经检测的属于电磁组;车模通过采集赛道图像(一维、二维)或者连续扫描赛道反射点的方式进行进行路经检测的属于摄像头组;车模通过采集赛道上少数孤立点反射亮度进行路经检测的属于光电组。
文档来自于网络搜索竞赛秘书处制定如下比赛规则适用于各分(省)赛区预赛以及全国总决赛,在实际可操作性基础上力求公正与公平。
文档来自于网络搜索一、器材限制规定1. 须采用统一指定的车模。
本届比赛指定采用三种车模,分别用于三个赛题组:编号车模外观和规格赛题组供应厂商A型车模车模:G768电机:RS380-ST/3545,舵机:FUTABA3010摄像头组东莞市博思电子数码科技有限公司B 型车模型号电机:540,伺服器:S-D6光电北京科宇车模组通博科技有限公司C型车模车模型号:N286电机:RN260-CN 38-18130伺服器:FUTABA3010电磁组东莞市博思电子数码科技有限公司各赛题组车模运行规则:a)光电组,摄像头组:车模正常运行。
车模使用A型车模(摄像头组)、B型车模(光电组)。
车模运行方向为,转向轮在前,动力轮在后。
如图1所示:文档来自于网络搜索图1 光电组车模运行方向说b)电磁组:车模直立行走。
使用C型车模。
车模运行时只允许动力轮着地,车模直立行走。
第七届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体公司的8位、16位、32位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发等,完成智能车工程制作及调试,于指定日期与地点参加各分(省)赛区的场地比赛,在获得决赛资格后,参加全国决赛区的场地比赛。
参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定,参加全国总决赛的队伍同时必须提交车膜技术报告。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过感应由赛道中心电线产生的交变磁场进行路经检测的属于电磁组;车模通过采集赛道图像(一维、二维)或者连续扫描赛道反射点的方式进行进行路经检测的属于摄像头组;车模通过采集赛道上少数孤立点反射亮度进行路经检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分(省)赛区预赛以及全国总决赛,在实际可操作性基础上力求公正与公平。
一、器材限制规定1.各赛题组车模运行规则:a) 光电组,摄像头组:车模正常运行。
车模使用A 型车模(摄像头组)、B 型车模(光电组)。
车模运行方向为,转向轮在前,动力轮在后。
如图1所示:图1 光电组车模运行方向说b) 电磁组:车模直立行走。
使用C 型车模。
车模运行时只允许动力轮着地,车模直立行走。
如图2所示:图2 电磁组车模运行状态注:原车模的前轮(转向轮)、舵机实际上没有用了,可以去掉。
前轮的轮胎可以用作后轮的备用车胎。
●细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的8位、16位、32位处理器作为唯一的微控制器。
●有关细节及其它电子器件使用的限制见附件二;3. 三个赛题组使用传感器限制:●参加电磁赛题组不允许使用光学传感器获得道路的光学信息,但是可以使用光电码盘测量车速;●参加光电赛题组不允许使用图像传感器获取道路图像信息进行路径检测;●参加摄像头赛题组可以使用光电管作为辅助检测手段;●非电磁组的赛道不保证有电磁信号;4. 其他事项●如果车模中禁止改动的部件发生损坏,需要使用相同型号的部件替换;●摄像头组车模改装完毕后,车模尺寸不能超过:250mm 宽和400mm长。
光电组车模改装完毕后,车模尺寸不能超过350mm宽和400mm长。
电磁组车模改装完毕后,车模尺寸宽度不超过250mm,长度没有限制。
二、有关赛场的规定1. 赛道基本参数(不包括拐弯点数、位置以及整体布局)见附件三;2. 比赛赛道实际布局将在比赛当日揭示,在赛场内将安排采用与制作实际赛道相同的材料所做的测试赛道供参赛队进行现场调试;三、裁判及技术评判竞赛分为分赛区(省赛区)和全国总决赛两个阶段。
其中,全国总决赛阶段是在全国竞赛组委会秘书处指导下,与决赛承办学校共同成立竞赛执行委员会,下辖技术组、裁判组和仲裁委员会,统一处理竞赛过程中遇到的各类问题。
全国和分赛区(省赛区)竞赛组织委员会工作人员,包括技术评判组及现场裁判组人员均不得在现场比赛期间参与任何针对个别参赛队的指导或辅导工作,不得泄露任何有失公允竞赛的信息。
在现场比赛的时候,组委会可以聘请参赛队伍带队教师作为车模检查监督人员。
在分赛区(省赛区)阶段中,裁判以及技术评判由各分赛区(省赛区)组委会参照上述决赛阶段组织原则实施。
四、分赛区、总决赛比赛规则分赛区和总决赛的比赛规则相同,都具有电磁组、光电组和摄像头组三各赛题组比赛。
三个赛题组比赛原则上在同一个场馆同时进行,所遵循的比赛规则也基本相同的。
三个赛题组分别独立进行成绩排名。
分赛区和总决赛的现场比赛均包括初赛与决赛两个阶段。
下面列出的现场预赛、决赛阶段的比赛规则适用于各分赛区及总决赛的三个赛题组。
1.初赛与决赛规则1) 初赛阶段规则i.比赛场中有三条赛道。
ii.参赛队根据比赛题目分为三个组,并以抽签形式决定组内比赛次序。
iii.比赛分为两轮,三个赛题组同时在三个赛道上进行比赛,每支参赛队伍可以在每轮比赛之前有10分钟的现场调整时间。
在此期间,参赛队伍只允许对赛车的硬件(不包括微控制器芯片)进行调整。
第二轮比赛在同一赛道沿逆向进行。
iv.在每轮比赛中,选手首先将赛车放置在起跑区域内赛道上,赛车至少静止两秒钟后自动启动。
对于电磁组不要求赛车静止两秒钟启动。
v.每辆赛车在赛道上跑一圈,以计时起始线为计时点,跑完一圈后赛车需要自动停止在起始线之后三米之内的赛道内,如果没有停止在规定的区域内,比赛计时成绩增加1秒。
对于电磁组比赛不要求车模停止在起跑线之后三米之内的赛道上。
vi.每辆赛车以在两个单轮成绩中较好的一个作为赛车最终初赛成绩;计时由电子计时器完成并实时显示。
vii.根据参赛队伍数量,由比赛组委会根据成绩选取一定比例的队伍晋级决赛。
viii.晋级决赛的赛车在决赛前有10分钟的调整时间。
在此期间,参赛队伍只允许对赛车的硬件(不包括微控制器芯片)进行调整。
技术评判组将对全部晋级的赛车进行现场技术检查,如有违反器材限制规定的(指本规则之第一条)立即取消决赛资格,由后备首名晋级代替。
ix.由裁判组申报组织委员会批准公布决赛名单。
x.全部车模在整个比赛期间都统一放置在车模的展示区内。
2)决赛阶段规则i.参加决赛队伍按照预赛成绩进行排序,比赛顺序按照预赛成绩的倒序进行。
ii.决赛的比赛场地使用一个赛道。
决赛赛道与预赛赛道形状不同,占地面积会增大,赛道长度会增加。
电磁组可能另外单独铺设跑道。
iii.每支决赛队伍只有一次比赛机会,在跑道上跑一圈,比赛过程与要求同预赛阶段。
iv.计时由电子计时器完成并实时显示。
v.预赛成绩不记入决赛成绩,只决定决赛比赛顺序。
没有参加决赛阶段比赛的队伍,预赛成绩为最终成绩,参加该赛题组的排名。
2.比赛过程规则按照比赛顺序,裁判员指挥参赛队伍顺序进入场地比赛。
同一时刻,一个场地上只有一支队伍进行比赛。
在裁判员点名后,每队指定一名队员持赛车进入比赛场地。
参赛选手有30秒的现场准备时间。
准备好后,裁判员宣布比赛开始,选手将赛车放置在起跑区内,即赛车的任何一部分都不能超过计时起始线。
赛车应在起跑区静止两秒钟以上,然后自动出发(电磁组直立行走车模不要求静止两秒钟)。
赛车应该在30秒之内离开出发区,沿着赛道跑完一圈。
由计时起始线传感器进行自动计时。
赛车跑完一圈且自动停止后(电磁组直立行走车模不要求自动停止),选手拿起赛车离开场地,将赛车放置回指定区域。
如果比赛完成,由计算机评分系统自动给出比赛成绩。
3.比赛犯规与失败规则比赛过程中,由比赛现场裁判根据统一的规则对于赛车是否冲出跑道进行裁定。
赛车前两次冲出跑道时,由裁判员取出赛车交给比赛队员,立即在起跑区重新开始比赛。
选手也可以在赛车冲出跑道后放弃比赛。
比赛过程中出现下面的情况,算作模型车冲出跑道一次。
●裁判点名后,30秒之内,参赛队没有能够进入比赛场地并做好比赛准备;●比赛开始后,赛车在30秒之内没有离开出发区;●赛车在离开出发区之后60秒之内没有跑完一圈;比赛过程中如果出现有如下一种情况,判为比赛失败:●赛车冲出跑道的次数超过两次;●比赛开始后未经裁判允许,选手接触赛车;●决赛后,赛车没有通过现场技术检验。
如果比赛失败,则不计成绩。
比赛禁止事项:●不允许在赛车之外安装辅助照明设备及其它辅助传感器等;●选手进入比赛场地后,除了可以更换电池之外,不允许进行任何硬件和软件的修改。
但是可以手工改动电路板上的拨码开关或者电位器等;●比赛场地内,除了裁判与1名队员之外,不允许任何其他人员进入场地;●不允许其它干扰赛车运动的行为;●不允许赛车的任何传感器或者部件损毁跑道;●不允许车模设计方案抄袭,各个参赛队伍所设计的硬软件需要相互之间有明显的不同。
4.比赛组织说明:1)现场正式比赛前,每个参赛队伍都有现场环境适应性调试阶段。
调试跑道与比赛跑道形状不一定一样。
2)比赛开赛之前,所有车模都由比赛组委会收集并存放在同一保管区域,直到比赛结束。
3)在比赛期间,大赛组委会技术组将根据情况对参赛车模进行技术检查。
如果违反了比赛规则的禁止事项,大赛组委会有权取消参赛队伍的成绩。
五. 其他1. 比赛过程中有其他作弊行为的,取消比赛成绩;2. 参加预赛并晋级决赛的队伍人员不允许改变;3. 本规则解释权归比赛组织委员会和竞赛秘书处所有。
第七届全国大学生“飞思卡尔”杯智能汽车竞赛组织委员会全国大学生智能汽车竞赛秘书处2011年11月1日附件一:智能竞赛车模的规定1)禁止改动车底盘结构、轮距、轮径及轮胎;2)禁止采用其它型号的驱动电机,禁止改动驱动电机的传动比;3)禁止改造车模运动传动结构;4)禁止改动舵机,但可以更改舵机输出轴上连接件;5)禁止改动驱动电机以及电池,车模前进动力必须来源于车模本身直流电机及电池;6)禁止增加车模地面支撑装置。
在车模静止、动态运行过程中,只允许车模原有四个车轮对车模起到支撑作用。
对于电磁组,车模直立行走,在比赛过程中,只允许原有车模两个后轮对车模起到支撑作用。
7)为了安装电路、传感器等,允许在底盘上打孔或安装辅助支架等。
附件二:电路器件及电路制作限制1)车模控制电路须采用飞思卡尔半导体公司的8位、16位、32位MCU作为唯一的微控制器。
同一学校同一组别不同队伍之间需要采用飞思卡尔不同系列的微控制器。
飞思卡尔不同系列的微控制器包括,32位Kinetis 系列;32位ColdFire系列;32位MPC56xx系列;8位微控制器系列(可使用2片);16位DSC系列;16位微控制器9S12XS系列;16位微控制器9S12G系列。
核心控制模块可以采用组委会推荐的K10、9S12XS128、MPC5604B,也可以选用以上所述飞思卡尔公司微控制器自制控制电路板。
每台模型车的电路板中只允许使用一种型号微控制器。
8位微控制器最多可以使用2片,16、32位微控制器限制使用1片;不得同时使用8位、16位和32位微控制器。
2)除了上述规定的微控制器之外不得使用辅助处理器以及其它可编程器件;3)伺服电机数量不超过3个。
除了原车模配置的转向舵机之外,新增加的舵机的型号必须是由广东博思公司提供的舵机FUTABA3010。
4)传感器数量不超过16个:光电传感器接受单元计为1个传感器,发射单元不计算;CCD传感器计为1个传感器;磁场传感器在同一位置可以有不同方向传感器,计为一个传感器。
对于车模的车速和姿态进行检测的传感器也计算在内。
5)在电磁组中,如果选用加速度器,则必须选择飞思卡尔公司的MMA7260,MMA7660,MMA7360,MMA8450,MMA8451等系列的加速度器。
如果选用陀螺仪,则必须选择村田公司的ENC-03系列的陀螺仪。
注:关于加速度传感器和陀螺仪选型的规定有可能会由于市场货源问题放宽,请关注竞赛网站上的更新信息。