第二节步进电机及驱动控制解析
- 格式:pptx
- 大小:328.12 KB
- 文档页数:28
步进电机的驱动原理
步进电机的驱动原理可以通过以下几点来解释:
1. 电磁驱动:步进电机内部通常包含多个线圈,每个线圈都有一对电极。
通过交替通电来激励这些线圈,可以产生磁场。
这个磁场与固定磁铁或其他线圈的磁场相互作用,从而使电机转动。
2. 步进角度:步进电机的转动一般是围绕其轴心以一定的步进角度进行的。
这个步进角度是由电机的结构和驱动信号决定的。
常见的步进角度有1.8度、0.9度、0.72度等。
通过适当的电
流驱动和控制信号,可以实现电机按照这些角度进行准确的转动。
3. 控制信号:步进电机一般需要外部的电流驱动器或控制器来提供适当的电流和控制信号。
这些控制信号通常是脉冲信号,通过改变脉冲的频率、宽度和方向,可以控制电机的转动速度和方向。
4. 开环控制:步进电机的控制通常是开环控制,即没有反馈回路来监测电机的实际位置和速度。
控制信号是基于预先设定的脉冲数目和频率来驱动电机的。
因此,步进电机在运行过程中可能存在累积误差,特别是在高速运动或长时间运行的情况下。
总而言之,步进电机的驱动原理是通过控制电流、改变磁场以及控制信号的脉冲,实现电机按照设定的步进角度进行准确转动的过程。


步进电机与驱动器工作原理
步进电机是一种可以将电脉冲信号转换为角位移的电动机。
其工作原理基于电磁感应的原理,包括了转子、定子和电磁线圈。
步进电机的转子通常是圆形,并包含有多个永磁体,被称为极。
定子通常由电磁线圈构成,线圈被排列成一定的几何形状,可以是单相(两个线圈)或多相(多个线圈)。
当从电源中提供适当的电流到定子线圈时,线圈会产生磁场。
步进电机的工作通过改变线圈中的电流来实现。
当电流通过一个定子线圈时,产生的磁场将吸引转子靠近该线圈的磁极。
然后,电流在另一个定子线圈上开启,而前一个线圈则关闭。
这种轮流切换的过程会导致转子在一个方向上旋转一定的角度。
为了更精确地控制步进电机的角位移,通常使用驱动器来提供适当的电流和脉冲信号。
驱动器通过控制电流的大小和方向,以及相应的脉冲信号来实现步进电机的精确运动。
总的来说,步进电机的工作原理是基于电磁感应,通过改变电流和磁场的组合来实现转子的角位移。
驱动器则负责控制电流和提供脉冲信号,以实现步进电机的精确控制。
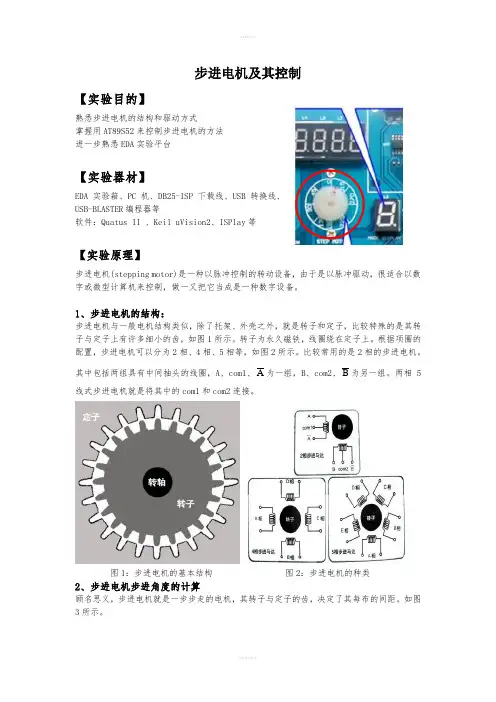
步进电机及其控制【实验目的】熟悉步进电机的结构和驱动方式掌握用AT89S52来控制步进电机的方法进一步熟悉EDA实验平台【实验器材】EDA实验箱、PC机、DB25-ISP下载线、USB转换线、USB-BLASTER编程器等软件:Quatus II 、Keil uVision2、ISPlay等【实验原理】步进电机(stepping motor)是一种以脉冲控制的转动设备,由于是以脉冲驱动,很适合以数字或微型计算机来控制,做一又把它当成是一种数字设备。
1、步进电机的结构:步进电机与一般电机结构类似,除了托架、外壳之外,就是转子和定子,比较特殊的是其转子与定子上有许多细小的齿,如图1所示。
转子为永久磁铁,线圈绕在定子上。
根据项圈的配置,步进电机可以分为2相、4相、5相等,如图2所示。
比较常用的是2相的步进电机。
其中包括两组具有中间抽头的线圈,A、com1、A为一组,B、com2、B为另一组。
两相5线式步进电机就是将其中的com1和com2连接。
图1:步进电机的基本结构图2:步进电机的种类2、步进电机步进角度的计算顾名思义,步进电机就是一步步走的电机,其转子与定子的齿,决定了其每布的间距。
如图3所示。
图3:步进电机的齿间距若转子上有N 个齿,则其齿间距θ为:N360︒==转子齿间距θ而步进角度δ为:P22θδ=⨯=相数转子齿间距以常用的2相式50齿步进电机为例,θ=360°/50=7.2°δ=7.2°/(2×2)=1.8°3、步进电机的驱动:步进电机的驱动是靠定子线圈激磁后,将邻近转子上相异磁极吸引过来实现的。
因此,线圈排列的顺序,以及激磁信号的顺序就很重要。
以2相式步进电机为例,其驱动信号有1相驱动、2相驱动和1-2相驱动三种。
图4:步进电机的驱动方式:1相驱动、2相驱动和1-2相驱动。
(1)、1相驱动:任何一个时间,只有一组线圈被激磁,其他线圈在休息,因此产生的力矩较小,但这种激磁方式最简单,信号依次为:1000-0100-0010-0001-1000……(正转)0001-0010-0100-1000-0001……(反转)有四种不同的信号呈现周期性的变化。
《步进电机驱动控制技术及其应用设计研究》篇一一、引言步进电机是一种通过输入脉冲序列来驱动转动的电机,其运动方式为离散化的步进动作。
步进电机广泛应用于精密定位、速度控制以及数字化系统等场景。
本文将针对步进电机驱动控制技术及其应用设计进行研究,深入探讨其原理、特点以及在各个领域的应用。
二、步进电机驱动控制技术原理步进电机主要由定子、转子和驱动器三部分组成。
定子上有多个磁极,转子则由多个磁性材料制成的齿组成。
驱动器根据输入的脉冲序列,控制定子上的电流变化,从而产生旋转磁场,使转子按照一定的方向和角度进行转动。
步进电机驱动控制技术主要包括以下几种:1. 恒流驱动技术:通过恒流源对步进电机进行驱动,保证电机在不同负载和转速下均能保持稳定的运行状态。
2. 微步技术:通过精细控制驱动器的脉冲序列,使步进电机在每个方向上实现微小角度的转动,从而提高电机的定位精度和运行平稳性。
3. 环形分布电流技术:通过对定子上的磁极进行环形分布电流的控制,实现对步进电机的持续运动控制,使得步进电机的转动更为流畅和准确。
三、步进电机驱动控制技术的应用设计步进电机驱动控制技术在各个领域有着广泛的应用,主要包括以下几个方面:1. 精密定位系统:步进电机的高精度定位能力使得其在精密定位系统中得到广泛应用,如数控机床、精密测量仪器等。
通过微步技术和环形分布电流技术的应用,可以实现高精度的定位和运动控制。
2. 速度控制系统:步进电机在速度控制系统中也有着重要的应用,如打印机、电动阀等。
通过调整脉冲序列的频率和占空比,可以实现对电机转速的精确控制。
3. 数字化系统:步进电机在数字化系统中也有着广泛的应用,如数字标牌、机器人等。
通过将步进电机的运动与数字信号进行映射,可以实现数字化的运动控制和显示功能。
四、应用设计实例分析以数控机床为例,分析步进电机驱动控制技术的应用设计。
数控机床是一种高精度的加工设备,其运动控制系统对加工精度和效率具有重要影响。

步进电机控制步进电动机一、步进电动机的组成和种类二、步进电动机的工作原理2.1.1B'B'C'C'这种工作方式下这种工作方式下,,三个绕组依次通电一次为一个循环周期个循环周期,,一个循环周期包括三个工作脉冲一个循环周期包括三个工作脉冲,,所以称为三相单三拍工作方式以称为三相单三拍工作方式。
按A →B →C →A →……的顺序给三相绕组轮流通电轮流通电,,转子便一步一步转动起来转子便一步一步转动起来。
每一拍转过30°(步距角步距角)),每个通电循环周期每个通电循环周期(3(3(3拍拍)转过90°(一个齿距角一个齿距角))。
2.1 2.1 步进电动机步进电动机步进电动机结构与工作原理结构与工作原理2.1.2 三相六拍按A →AB →B →BC →C →CA 的顺序给三相绕组轮流通电序给三相绕组轮流通电。
这种方式可以获得更精确的控制特性获得更精确的控制特性。
4123齿与A、A' 对齐对齐。
对齐,,又转324齿与B、B´对齐三相反应式步进电动机的一个通电循环周期如下期如下::A →AB →B →BC →C →CA ,每个循环周期分为六拍环周期分为六拍。
每拍转子转过15°(步距角步距角),),),一一个通电循环周期环周期((6拍)转子转过90°(齿距角齿距角))。
与单三拍相比与单三拍相比,,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中更适用于需要精确定位的控制系统中。
2.1.3 三相双三拍按AB→BC→CA的顺序给三相绕组轮流通每拍有两相绕组同时通电。
电。
每拍有两相绕组同时通电。
B'C'B'C'B'C'360°电机转动的电机转动的工作原理演示工作原理演示总结总结::错齿是步进电动机旋转的根本原因齿距角是齿距角是99°;定子仍是6个磁极个磁极,,但每个磁极表面加工有五个和转子一样的齿面加工有五个和转子一样的齿。
步进电机的原理及控制方法步进电机是一种常见的电机类型,具有精准定位、简单控制等优点,在许多应用领域得到广泛应用。
本文将介绍步进电机的工作原理以及常见的控制方法。
1. 工作原理步进电机是一种将电脉冲信号转换为机械位移的电机。
其工作原理基于磁场相互作用,根据电磁学原理可分为单相和双相两种类型。
1.1 单相步进电机单相步进电机由定子和转子两部分组成,定子上绕有线圈,通电时产生磁场。
转子上装有磁性材料,根据两者之间磁场相互作用来实现旋转。
1.2 双相步进电机双相步进电机比单相步进电机更常见,其定子上有两组线圈,通电时可以产生不同方向的磁场,从而实现精确的步进运动。
2. 控制方法步进电机的控制方法主要包括开环控制和闭环控制两种。
2.1 开环控制开环控制是指通过给步进电机提供一定频率和脉冲数的信号来实现旋转运动,但无法保证绝对的位置精准度。
这种方法简单易实现,适用于一些对位置要求不高的应用场景。
2.2 闭环控制闭环控制通过在步进电机系统中加入位置反馈传感器,实时监测电机位置并与设定位置进行比较,从而调整控制信号以实现精确的位置控制。
闭环控制能够提高系统的稳定性和精度,适用于对位置要求较高的应用。
3. 应用领域步进电机在许多领域得到广泛应用,如打印设备、数控机床、医疗设备等。
其精准性和简单控制特点使其成为自动化设备中重要的驱动元件。
结语步进电机作为一种重要的电机类型,具有独特的工作原理和控制方法,为许多自动化设备的驱动提供了可靠保障。
通过深入了解步进电机的原理和控制方法,可以更好地应用于实际场景中,发挥其优势,实现精准的位置控制和运动控制。
步进电机驱动器及细分控制原理(最全)word资料步进电机驱动器及细分控制原理步进电机驱动器原理:步进电机必须有驱动器和控制器才能正常工作。
驱动器的作用是对控制脉冲进行环形分配、功率放大,使步进电机绕组按一定顺序通电。
以两相步进电机为例,当给驱动器一个脉冲信号和一个正方向信号时,驱动器经过环形分配器和功率放大后,给电机绕组通电的顺序为AABB A A B B,其四个状态周而复始进行变化,电机顺时针转动;若方向信号变为负时,通电时序就变为AA B BA A BB,电机就逆时针转动。
随着电子技术的发展,功率放大电路由单电压电路、高低压电路发展到现在的斩波电路。
其基本原理是:在电机绕组回路中,串联一个电流检测回路,当绕组电流降低到某一下限值时,电流检测回路发出信号,控制高压开关管导通,让高压再次作用在绕组上,使绕组电流重新上升;当电流回升到上限值时,高压电源又自动断开。
重复上述过程,使绕组电流的平均值恒定,电流波形的波顶维持在预定数值上,解决了高低压电路在低频段工作时电流下凹的问题,使电机在低频段力矩增大。
步进电机一定时,供给驱动器的电压值对电机性能影响较大,电压越高,步进电机转速越高、加速度越大;在驱动器上一般设有相电流调节开关,相电流设的越大,步进电机转速越高、力距越大。
细分控制原理:在步进电机步距角不能满足使用要求时,可采用细分驱动器来驱动步进电机。
细分驱动器的原理是通过改变A,B相电流的大小,以改变合成磁场的夹角,从而可将一个步距角细分为多步。
定子A转子SNB B BSNA A(a(bAS NB B N S BS NA(c(d图3.2步进电机细分原理图仍以二相步进电机为例,当A、B相绕组同时通电时,转子将停在A、B相磁极中间,如图3.2。
若通电方向顺序按AA AABB BB BB AA AA AA BB BB BB AA,8个状态周而复始进行变化,电机顺时针转动;电机每转动一步,为45度,8个脉冲电机转一周。
步进电机基本原理讲解步进电机是一种特殊类型的电机,主要通过数字控制来完成精密转动和定位。
步进电机可以实现非常精确的运动控制,广泛应用于各种设备和机器人系统中。
本文将介绍步进电机的基本原理和工作方式。
1. 步进电机的构成步进电机基本上由两部分组成:转子和定子。
转子是电机旋转的部分,它由可旋转的磁极和磁性材料组成。
定子是电机静止的部分,它由电枢线圈和永磁体组成。
2. 步进电机的工作原理步进电机是通过不断改变电流方向来实现旋转的。
电流会产生磁场,当磁场和永磁体相互作用时,就会形成旋转力。
步进电机通过改变电流来控制磁场和旋转力。
步进电机的运行速度由提供的电压和电流控制。
步进电机驱动器会根据设定值改变电流方向和大小,控制电机旋转的速度和方向。
每次改变电流方向都会使电机旋转一个步距,所以步进电机转动的角度可以精确地控制,从而可以精确定位。
3. 步进电机的工作方式步进电机工作时,一般驱动器会按照指定的步进角度进行操作。
步进角度可以是1.8度、0.9度、0.45度或更小。
启动电机时,驱动器会向电机提供电压和电流,控制转子旋转。
控制电流方向和大小可确定电机的转角和速度。
这是一个相对精确的过程,因为每次改变电流方向都会使电机旋转一个步距,因此可以准确控制步进电机的位置和速度。
步进电机通常使用双极性或四极性驱动,也就是说,每次驱动电机时,都会使电机旋转两个或四个步数。
双极性驱动需要两个控制信号,而四极性驱动则需要四个。
四极性驱动具有更高的分辨率和精度,因为旋转步数更小,但也需要更复杂的控制。
4. 步进电机的应用步进电机常用在需要准确控制位置和速度的系统中。
例如精密仪器和设备、电子石英钟、纺织机、数控机床、打印机和绘图仪等。
步进电机还广泛用于机器人领域,包括自动化制造和堆垛机器人、医疗器械和照片扫描仪等。
在自动化制造行业中,步进电机可以帮助机器人、自动化设备和其他工业设备实现非常精确的位置和速度控制。
步进电机也可以在汽车发动机和机器人手臂等可更换关键零部件中使用,以便进行快速、准确的位置定位。
C N C 主要内容7.2 步进电机及其驱动控制系统主要内容:•步进电机的原理;•主要性能参数;•步进驱动的特点;•驱动控制:环形分配器,功放电路。
要求:在掌握原理基础上,注重围绕应用了解各型电机的特点、性能参数、功放电路。
主要内容定义:步进电机是一种脉冲控制的执行元件,将电脉冲转化为角位移。
每给步进电机输入一个脉冲,其转轴就转过一个角度,称为步距角。
✓脉冲数量----位移量;✓脉冲频率----电机转速;✓脉冲相序----方向。
组成:由步进电机驱动电源和步进电机组成,没有反馈环节,属于开环位置控制系统。
7.2.1 步进电机概述主要内容优点:结构简单,价格便宜,工作可靠;缺点:–容易失步(尤其在高速、大负载时),影响定位精度;–在低速时容易产生振动;–细分技术的应用,明显提高了定位精度,降低了低速振动。
应用:要求一般的开环伺服驱动系统,如经济型数控机床、和电加工机床、计算机的打印机、绘图仪等设备。
步进电动机的分类按运动方式分:旋转式、直线运动式、平面运动式和滚切运动式。
按工作原理分:反应式(磁阻式)、电磁式、永磁式、混合式。
按结构分:单段式(径向式)、多段式(轴向式),印刷绕组式。
按相数分:三相、四相、五相、六相和八相等。
按使用频率分:高频步进电动机和低频步进电动机。
(1) 反应式步进电动机极与极之间的夹角为60°,每个定子磁极上均匀分布了五个齿,齿槽距相等,齿距角为9°。
转子铁心上无绕组,只有均匀分布的40个齿,齿槽距相等,齿距角为360°/40=9°。
单段式的结构:三相反应式步进电动机。
定子铁心上有六个均匀分布的磁极,沿直径相对两个极上的线圈串联,构成一相励磁绕组。
特点:转子无绕组,定转子开小齿、步距小;应用最广。
7.2 步进电机及其驱动控制系统C N C(2) 永磁式步进电动机工作原理:转子或定子一方具有永久磁钢,另一方有软磁材料制成,由绕组轮流通电产生的磁场与永久磁钢相互作用,产生转矩是转子转动。
步进电机步进驱动器原理详细讲解剖析步进电机是一种可以按照指令精确旋转的电机,其精确性和可控性较高,广泛应用于各种自动化设备和机械设备中。
步进电机步进驱动器是控制步进电机旋转的主要组成部分,通过控制步进电机的电流、脉冲信号和驱动方式,实现电机的转动。
步进驱动器的作用步进驱动器的主要作用是将输入的脉冲信号转换成相应的电流,通过改变电流的方向和大小,控制步进电机的转动。
步进驱动器根据输入的脉冲信号来驱动步进电机旋转,脉冲信号的频率和脉冲数决定了步进电机的转速和旋转方向。
步进驱动器的工作原理步进驱动器的工作原理可以简单概括为:接收控制信号,根据信号的脉冲数和脉冲频率,输出相应的电流给步进电机,驱动步进电机的转动。
步进驱动器内部主要包含以下核心组件:1.逻辑控制模块:接收控制信号,根据信号的脉冲数和频率,产生相应的控制信号,用于驱动电流模块和方向模块。
2.电流模块:将逻辑控制模块输出的控制信号转换成相应的电流,通过电流控制步进电机的运行状态。
3.方向模块:根据逻辑控制模块的输出信号,控制步进电机的转动方向。
4.保护模块:用于检测电流和温度等参数,防止步进电机因过流或过热而损坏。
5.脉冲生成器:根据输入的脉冲信号,产生相应的脉冲,用于驱动步进电机。
步进驱动器的工作流程:1.接收输入的脉冲信号:步进驱动器通过接口接收输入的脉冲信号,这些信号经过编码器或控制器生成。
2.根据脉冲信号产生控制信号:逻辑控制模块根据输入的脉冲信号产生相应的控制信号,控制驱动电流和方向。
3.控制电流:电流模块将逻辑控制模块输出的控制信号转换成相应的电流,控制步进电机的运行状态。
4.控制方向:方向模块根据逻辑控制模块的输出信号控制步进电机的转动方向。
5.保护功能:保护模块可以监测电流和温度等参数,当电流过大或温度过高时,及时发出警报或停止电机运行,避免损坏电机。
步进驱动器的特点:1.精度高:步进驱动器可以精确控制步进电机的旋转角度,通常精度可达到0.9°或更低,适用于需要高精度控制的应用场合。