上海大学自动控制原理总复习一
- 格式:pdf
- 大小:208.12 KB
- 文档页数:8
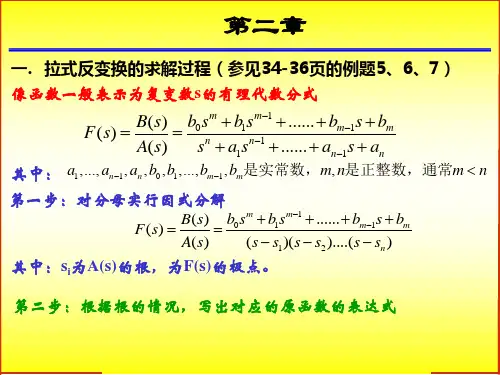

上海大学过控(1)复习要点和习题答案.课程掌握要点第一章绪论1.过程控制定义?掌握术语DCS,FCS,DDZ,QDZ2.常规仪表过程控制系统的组成?3.过程控制系统的性能指标。
尤其是单项指标。
4.自动化仪表的分类,信号体制:掌握气动仪表之间的联络信号是什么?电动模拟仪表的联络信号是什么?5.掌握单元组合仪表中设置活零点有什么好处?6.安全火花防爆系统第二章检测仪表1.传感器,变送器的作用。
检测变送的功能:转化为标准型号:24V DC 电源供电,4~20 mA 电流信号,1~5V DC 电压信号. 气动执行器 20~100 KPa2.掌握仪表的性能指标(误差,精度,特性曲线,零点,量程),掌握精度计算。
3.了解变送器与控制室仪表之间的信号四线制、三线制、二线制传输接线方式?4.掌握工业常用热电阻类型,热电阻的测温范围,注意事项及热电阻的接线方式。
5.掌握热电偶测温原理,范围,注意事项及冷端补偿和补偿导线。
6.掌握D D Z-I I I热电偶的特点。
7.了解热电偶变送器的作用,组成结构、各部分功能,实现原理。
8.掌握压力测量的弹性元件有哪几种?各种压力之间的关系。
9.掌握流量测量方法有那些,分类?节流式流量计测量流量原理,节流元件起什么作用?10.了解靶式流量计和其他流量计的工作原理。
11.掌握转子流量计的工作原理。
与差压流量计比较异同!涡街流量计测量原理。
12.了解液位测量仪表有哪几种?它们如何实现测量的原理?13.掌握利用压力或差压变送器来测量液位的原理?零点迁移。
课后作业答案:第一章 P151.(10)错(11)对2. (1)(用下图代替吧,手头无画图工具)其中控制器为LC,执行器为LV,检测变送可写为LT,对象为水槽,被控变量为液位(2)DDZ-III采用的电模拟信号体制:采用24V DC电源供电,4~20mA DC 电流信号作为工业现场和控制室之间各仪表之间的联络信号,1~5V DC电压信号作为控制室内各仪表之间的联络信号。
《自动控制原理》复习提纲自动控制原理复习提纲第一章:自动控制系统基础1.1自动控制的基本概念1.2自动控制系统的组成1.3自动控制系统的性能指标1.4自动控制系统的数学建模第二章:系统传递函数与频率响应2.1一阶惯性系统传递函数及特性2.2二阶惯性系统传递函数及特性2.3高阶惯性系统传递函数及特性2.4惯性环节与纯时延环节的传递函数2.5开环传递函数与闭环传递函数2.6频率响应曲线及其特性第三章:传递函数的绘制和分析3.1 Bode图的绘制3.2 Bode图的分析方法3.3 Nyquist图的绘制和分析3.4极坐标图的应用3.5稳定性分析方法第四章:闭环控制系统及稳定性分析4.1闭环控制系统4.2稳定性的概念和判据4.3 Nyquist稳定性判据4.4 Bode稳定性判据4.5系统的稳态误差分析第五章:比例、积分和微分控制器5.1比例控制器的原理和特性5.2积分控制器的原理和特性5.3微分控制器的原理和特性5.4比例积分(P)控制系统5.5比例积分微分(PID)控制系统第六章:根轨迹法6.1根轨迹的概念和基本性质6.2根轨迹的绘制方法6.3根轨迹法的稳定性判据6.4根轨迹设计法则6.5根轨迹法的应用案例第七章:频域设计方法7.1频域设计基本思想7.2平衡点反馈控制法7.3频域设计法的应用案例7.4系统频率响应的优化设计7.5频域方法的灵敏度设计第八章:状态空间分析和设计8.1状态空间模型的建立8.2状态空间的矩阵表示8.3状态空间系统的特性8.4状态空间系统的稳定性分析8.5状态空间设计方法和案例第九章:模糊控制系统9.1模糊控制的基本概念9.2模糊控制系统的结构9.3模糊控制器设计方法9.4模糊控制系统的应用案例第十章:遗传算法与控制系统优化10.1遗传算法的基本原理10.2遗传算法在控制系统优化中的应用10.3遗传算法设计方法和案例第十一章:神经网络及其应用11.1神经网络的基本概念和结构11.2神经网络训练算法11.3神经网络在控制系统中的应用11.4神经网络控制系统设计和优化方法第十二章:自适应控制系统12.1自适应控制的基本概念12.2自适应控制系统的结构12.3自适应控制器设计方法12.4自适应控制系统的应用案例第十三章:系统辨识与模型预测控制13.1系统辨识的基本概念13.2建模方法及其应用13.3模型预测控制的原理13.4模型预测控制系统设计和优化方法第十四章:多变量控制系统14.1多变量控制系统的基本概念14.2多变量系统建模方法14.3多变量系统稳定性分析14.4多变量系统控制器设计14.5多变量系统优化控制方法以上是《自动控制原理》的复习提纲,内容覆盖了自动控制系统的基本概念、传递函数与频率响应、传递函数的绘制和分析、闭环控制系统及稳定性分析、比例、积分和微分控制器、根轨迹法、频域设计方法、状态空间分析和设计、模糊控制系统、遗传算法与控制系统优化、神经网络及其应用、自适应控制系统、系统辨识与模型预测控制、多变量控制系统等知识点。
《自动控制原理》总复习第一章自动控制的基本概念一、学习要点1.自动控制基本术语:自动控制、系统、自动控制系统、被控量、输入量、干扰量、受控对象、控制器、反馈、负反馈控制原理等。
2.控制系统的基本方式:①开环控制系统;②闭环控制系统;③复合控制系统。
3.自动控制系统的组成:由受控对象和控制器组成。
4.自动控制系统的类型:从不同的角度可以有不同的分法,常有:恒值系统与随动系统;线性系统与非线性系统;连续系统与离散系统;定常系统与时变系统等。
5.对自动控制系统的基本要求:稳、快、准。
6.典型输入信号:脉冲、阶跃、斜坡、抛物线、正弦。
二、基本要求1.对反馈控制系统的基本控制和方法有一个全面的、整体的了解。
2.掌握自动控制系统的基本概念、术语,了解自动控制系统的组成、分类,理解对自动控制系统稳、准、快三方面的基本要求。
3.了解控制系统的典型输入信号。
4.掌握由系统工作原理图画方框图的方法。
三、内容结构图四、知识结构图第二章 控制系统的数学模型一、学习要点1.数学模型的数学表达式形式(1)物理系统的微分方程描述;(2)数学工具—拉氏变换及反变换; (3)传递函数及典型环节的传递函数;(4)脉冲响应函数及应用。
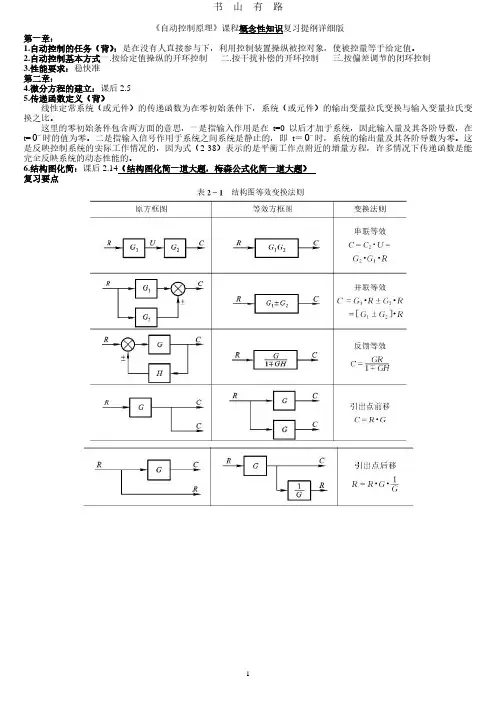
2.数学模型的图形表示(1)结构图及其等效变换,梅逊公式的应用;(2)信号流图及梅逊公式的应用。
二、基本要求1、正确理解数学模型的特点,对系统的相似性、简化性、动态模型、静态模型、输入变量、输出变量、中间变量等概念,要准确掌握。
2、了解动态微分方程建立的一般方法及小偏差线性化的方法。
3、掌握运用拉氏变换解微分方程的方法,并对解的结构、运动模态与特征根的关系、零输入响应、零状态响应等概念有清楚的理解。
4、正确理解传递函数的定义、性质和意义。
熟练掌握由传递函数派生出来的系统开环传递函数、闭环传递函数、误差传递函数、典型环节传递函数等概念。
(#)5、掌握系统结构图和信号流图两种数学模型的定义和绘制方法,熟练掌握控制系统的结构图及结构图的简化,并能用梅逊公式求系统传递函数。

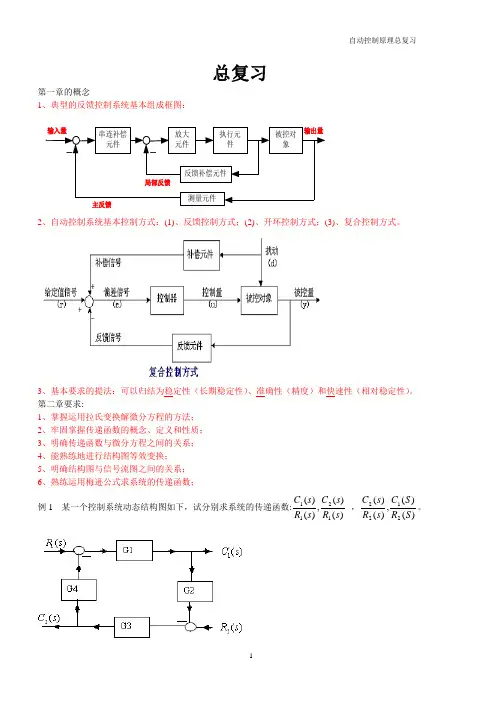
总复习第一章的概念1、典型的反馈控制系统基本组成框图:2、自动控制系统基本控制方式:(1)、反馈控制方式;(2)、开环控制方式;(3)、复合控制方式。
3、基本要求的提法:可以归结为稳定性(长期稳定性)、准确性(精度)和快速性(相对稳定性)。
第二章要求:1、掌握运用拉氏变换解微分方程的方法;2、牢固掌握传递函数的概念、定义和性质;3、明确传递函数与微分方程之间的关系;4、能熟练地进行结构图等效变换;5、明确结构图与信号流图之间的关系;6、熟练运用梅逊公式求系统的传递函数;例1 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(1211s R s C s R s C ,)()(,)()(2122S R S C s R s C 。
43213211243211111)()(,1)()()(G G G G G G G s R s C G G G G s G s R s C --=-=例2 某一个控制系统动态结构图如下,试分别求系统的传递函数:)()(,)()(,)()(,)()(s N S E s R s E s N s C s R s C 。
例例4、一个控制系统动态结构图如下,试求系统的传递函数。
X r5214323211)()(W W W W W W S X S X r c ++=例5 如图RLC 电路,试列写网络传递函数 U c (s)/U r (s).解: 零初始条件下取拉氏变换:例6某一个控制系统的单位阶跃响应为:t te et C --+-=221)(,试求系统的传递函数、微分方程和脉冲响应。
解:传递函数: )1)(2(23)(+++=s s s s G ,微分方程:)(2)(3)(2)(3)(22t r dt t dr t c dt t dc dtt c d +=++ 脉冲响应:t te et c 24)(--+-=例7一个控制系统的单位脉冲响应为t te et C ---=24)(,试求系统的传递函数、微分方程、单位阶跃响应。

∑∆∆=i i i s s Q s H )()(1)(第一章:1 闭环系统(或反馈系统)的特征:采用负反馈,系统的被控变量对控制作用有直接影响,即被控变量对自己有控制作用 。
2 典型闭环系统的功能框图。
自动控制 在没有人直接参与的情况下,通过控制器使被控对象或过程按照预定的规律运行。
自动控制系统 由控制器和被控对象组成,能够实现自动控制任务的系统。
被控制量 在控制系统中.按规定的任务需要加以控制的物理量。
控制量 作为被控制量的控制指令而加给系统的输入星.也称控制输入。
扰动量 干扰或破坏系统按预定规律运行的输入量,也称扰动输入或干扰掐入。
反馈 通过测量变换装置将系统或元件的输出量反送到输入端,与输入信号相比较。
反送到输入端的信号称为反馈信号。
负反馈 反馈信号与输人信号相减,其差为偏差信号。
负反馈控制原理 检测偏差用以消除偏差。
将系统的输出信号引回插入端,与输入信号相减,形成偏差信号。
然后根据偏差信号产生相应的控制作用,力图消除或减少偏差的过程。
开环控制系统 系统的输入和输出之间不存在反馈回路,输出量对系统的控制作用没有影响,这样的系统称为开环控制系统。
开环控制又分为无扰动补偿和有扰动补偿两种。
闭环控制系统 凡是系统输出端与输入端存在反馈回路,即输出量对控制作用有直接影响的系统,叫作闭环控制系统。
自动控制原理课程中所讨论的主要是闭环负反馈控制系统。
复合控制系统 复合控制系统是一种将开环控制和闭环控制结合在一起的控制系统。
它在闭环控制的基础上,用开环方式提供一个控制输入信号或扰动输入信号的顺馈通道,用以提高系统的精度。
自动控制系统组成 闭环负反馈控制系统的典型结构如图1.2所示。
组成一个自动控制系统通常包括以下基本元件1.给定元件 给出与被控制量希望位相对应的控制输入信号(给定信号),这个控制输入信号的量纲要与主反馈信号的量纲相同。
给定元件通常不在闭环回路中。
2.测量元件 测量元件也叫传感器,用于测量被控制量,产生与被控制量有一定函数关系的信号。
《⾃动控制原理》复习提纲1第⼀篇基本原理和基本概念概要第⼀章绪论⼀、⾃动控制和⾃动控制系统基本概念1.⾃动控制:在没有⼈直接参与的情况下,利⽤控制设备或装置,使被控对象的被控量⾃动的按预定的规律变化。
2.⾃动控制系统:能⾃动对被控对象的被控量(或⼯作状态)进⾏控制的系统。
3.被控对象(⼜称受控对象):指⼯作状态需要加以控制的机械、装置或过程。
4.被控量:表征被控对象⼯作状态且需要加以控制的物理量,也是⾃动控制系统的输出量。
5.给定值(⼜称为参考输⼊):希望被控量趋近的数值。
⼜称为规定值。
6.扰动量(⼜分为内扰和外扰):引起被控量发⽣不期望的变化的各种内部或外部的变量。
7.控制器(⼜称调节器):组成控制系统的两⼤要素之⼀(另⼀⼤要素即为被控对象),是起控制-1-作⽤的设备或装置。
8.负反馈控制原理:将系统的输出信号反馈⾄输⼊端,与给定的输⼊信号相减,所产⽣的偏差信号通过控制器变成控制变量去调节被控对象,达到减⼩偏差或消除偏差的⽬的。
⼆、⾃动控制原理的组成和⽅框图典型的⾃动控制系统的基本组成可⽤图1.1-1的⽅框图来表⽰。
其中的基本环节有:1)受控对象:需要控制的装置、设备及过程。
2)测量变送元件:测量被控量的变化,并使之变换成控制器可处理的信号(⼀般是电信号)。
3)执⾏机构:将控制器发来的控制信号变换成操作调节机构的动作。
4)调节机构:可改变受控对象的被控量, 使之趋向给定值。
5)控制器:按照预定控制规律将偏差值变换成控制量。
⾃动控制装置三、⾃动控制系统的基本控制⽅式:⾃动控制系统的基本控制⽅式有开环控制、闭环控制和复合控制三种。
开环控制适⽤于控制任务要求不⾼的场合。
⼯程上绝⼤部分的⾃动控制系统为闭环控制。
对控制任务要求较⾼,且扰动量可测量的场合,常采⽤复合控制系统(⼜称前馈——反馈复合控制系统)。
四、⾃动控制系统的分类2.按元件的静态特性分类:线性控制系统、⾮线性控制系统。
3.按信号是连续的还是离散的分类:连续(时间)控制系统、离散(时间)控制系统。
自动控制原理总复习资料(完美)总复第一章的概念典型的反馈控制系统基本组成框图如下:输出量串连补偿放大执行元被控对元件元件件象--反馈补偿元件测量元件自动控制系统有三种基本控制方式:反馈控制方式、开环控制方式和复合控制方式。
基本要求可以归结为稳定性(长期稳定性)、准确性(精度)和快速性(相对稳定性)。
第二章要求:1.掌握运用拉普拉斯变换解微分方程的方法。
2.牢固掌握传递函数的概念、定义和性质。
3.明确传递函数与微分方程之间的关系。
4.能熟练地进行结构图等效变换。
5.明确结构图与信号流图之间的关系。
6.熟练运用梅森公式求系统的传递函数。
例1:某一个控制系统动态结构图如下,求系统的传递函数。
C1(s)C2(s)C(s)C1(s)G1(s)G2(s)G3(s)R1(s)R2(s)R1(s)R2(s)传递函数为:C(s) = G1(s)C1(s) / [1 -G1(s)G2(s)G3(s)R1(s)R2(s)]例2:某一个控制系统动态结构图如下,求系统的传递函数。
C(s)C(s)E(s)E(s)R(s)N(s)R(s)N(s)C(s)G1(s)G2(s)-G2(s)传递函数为:C(s) = G1(s)C(s) / [1 + G1(s)G2(s)H(s)N(s)]例3:i1(t)R1 i2(t)R2R(s)+u1(t) c1(t)C1 C2 r(t)I1(s)+U1(s)112+I2(s)将上图汇总得到:R1I1(s)U1(s)C1s r(t)-u(t) = i(t) R U1(s)u(t) = [i(t) - i(t)]dt Cu(t) - c(t) = i(t)Rc(t) = i(t)dtCI2(s)R2KaC(s)1C2s(b)C(s) R(s)+R1C1sR2C2s1Ui(s)1/R11/C1sIC(s)1/R21/C2s10rad/s,试求系统的传递函数、特征方程、极点位置以及阻尼比和固有频率的物理意义。