风力摆控制系统论文
- 格式:doc
- 大小:346.50 KB
- 文档页数:9
2021.05科学技术创新风力摆控制系统分析覃仕明1玉函2(1、广西壮族自治区特种设备检验研究院,广西南宁5302002、通力电梯有限公司南宁分公司,广西南宁530200)风力摆控制系统用来控制电机做单摆形式的运动,其简谐运动规律可涉及到物理领域的各个方面,如分子运动、电磁振荡等[1]。
风力摆控制系统是物理研究理论与现代控制理论的结合,如何通过现代控制理论实现物理运动规律,对目前解决实际工业上遇到的问题有很大的研究意义,在经典控制理论和现代控制理论上非常值得探究。
1控制系统分析风力摆控制系统是一个伺服随动控制系统[2],伺服随动控制系统实现的要求是具备快速跟踪和精确定位,快速跟踪与伺服带宽有关系,带宽越大,快速性就会越好,而带宽主要会受到硬件的惯性限制,惯性越来越大,带宽越来越窄,所以风力摆控制系统的摆杆质量大小可影响其快速跟踪的性能。
系统精确定位的实现则需要机械结构与硬件搭建合理,同时在软件上使用控制算法提高系统的整体抗干扰性。
1.1风力摆简谐运动分析风力摆控制系统是单摆运动的衍生,单摆运动属于简谐运动[3],所以本系统的运动本质为简谐运动,其数学方程为:(1)风力摆控制系统的所有运动轨迹都将以简谐运动作为实现依据。
除此之外,单摆运动周期方程为:(2)式中的g 为重力加速度,L 为风力摆的摆杆长度。
假设取L=0.3m ,g 取10m/s 2。
因此有:(3)式中的摆杆长度的选取是相对较短的,假设最长的情况下,当选取为2m (4)所以由式(3)和式(4)得出结论,单摆周期的范围大概在1.09s~2.81s 之间,其主要还是取决于摆杆的长度。
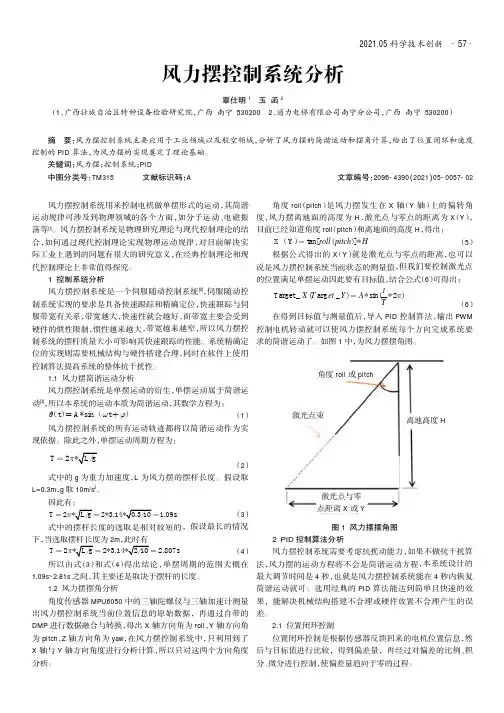
1.2风力摆摆角分析角度传感器MPU6050中的三轴陀螺仪与三轴加速计测量出风力摆控制系统当前位置信息的原始数据,再通过自带的DMP 进行数据融合与转换,得出X 轴方向角为roll ,Y 轴方向角为pitch ,Z 轴方向角为yaw ,在风力摆控制系统中,只利用到了X 轴与Y 轴方向角度进行分析计算,所以只对这两个方向角度分析。
一种风力摆控制系统秦玉伟【摘要】A wind pendulum controlling system based on MSP430 MCU is designed. The attitude information is collected by the gyroscope MPU6050. The rotate speeds of DC motor are then changed by the PID algorithm to control the motion trail. The experimental result shows that it has the functions of the selected length line motion,the circular motion and the quickly braking. It has the advantages of low power consumption,stable function and accurate swing trajectory.%设计了一种基于MSP430系列单片机的风力摆控制系统,利用陀螺仪MPU6050实时采集摆杆的姿态信息,再通过PID算法处理数据,改变直流电机的转速,控制风力摆的运动轨迹.实验结果表明,风力摆能实现定长直线运动轨迹、圆周运动轨迹及快速制动,具有低功耗、性能稳定、摆动轨迹准确的特点.【期刊名称】《河南科学》【年(卷),期】2016(034)011【总页数】4页(P1889-1892)【关键词】风力摆;直流电机;陀螺仪;PID算法【作者】秦玉伟【作者单位】渭南师范学院数理学院,陕西渭南 714099;陕西省X射线检测与应用研究开发中心,陕西渭南 714099【正文语种】中文【中图分类】TH741风力摆控制系统是利用风力实现物体运动状态控制的测控系统,风力摆通过风机转动使空气流动形成风力,实现对风力摆的运动轨迹控制[1-5].针对风力摆控制系统的关键问题,设计了一种自定义轨迹运动的风力摆控制系统,对风力摆的运动轨迹进行智能化精确控制,能够实现自定义轨迹扫描,如快速启动、定长度的直线运动轨迹、画圆圈、规定角度摆动、快速停止等运动控制功能,并且能够在风力作用下快速恢复原始状态.风力摆由摆杆、电源、单片机MSP430F149最小系统、按键、陀螺仪MPU6050、液晶显示屏LCD12864、电机驱动芯片L298N、空心杯电机及其他机械部件组成,系统结构如图1所示.MPU6050陀螺仪采集风力摆姿态数据,存储至其内部寄存器.系统以单片机MSP430F149为控制核心,通过I2C协议读取陀螺仪内部寄存器的姿态数据,根据PID算法计算姿态误差,并通过改变PWM波的占空比,利用电机驱动芯片L298N对空心杯电机进行独立转速控制,实现风力摆的姿态调整,设定的变量值和风力摆的姿态角数据等信息通过LCD12864液晶屏显示.2.1 单片机控制系统MSP430F149内部配置了16位超低功耗处理器,编程逻辑和内部功能丰富,自带丰富的寄存器和快速的处理器,编写的指令集(RISC)非常简单,同时集成了通用I/O控制模块、I2C通信协议模块、A/D转换模块、5 V转化3.3 V电源模块、串口通信模块、GSM模块等其他协议模块[6-8].2.2 陀螺仪风力摆通过陀螺仪MPU6050采集角度和角加速度等姿态信息,其内部整合了3轴陀螺仪和3轴加速器,能够检测运动的姿态角,对三轴角速度和三轴角加速度进行检测,并自带一个I2C端口,通过单片机I2C通信协议读取数据[9-13].陀螺仪MPU6050的SDA引脚和SCL引脚分别与单片机MSP430F149的P3.6和P3.7引脚相连;将陀螺仪角度数据放到其内部寄存器,通过访问固定地址读出角度数据,实现对陀螺仪角度数据的读取.2.3 驱动电机和驱动控制系统利用四个两两平行且转轴对称放置的空心杯电动机作为驱动,空心杯电机属于伺服电机,内部采用直流永磁,且无铁芯转子.其质量小、转速高、功耗低,且易控制、稳定性好,能够实现快速制动[14-16].驱动控制电路采用耐高电压、能驱动大电流电机的L298N芯片[17-18],控制引脚分别连接到单片机配置好的四个引脚上,通过单片机输出不同占空比的4路PWM波控制电机转速.风力摆的动力来源于悬挂的两组空心杯电机,受风机风力的限制,风力摆无法直接达到设定高度,因此在摆杆摆动过程中利用空心杯电机施加风力.风力摆的单摆周期可以表示为[19]:其中:L为摆杆的长度;g为重力加速度.系统启动后,根据周期T改变风机转向,当摆幅变大后,陀螺仪测量的角加速度变化很快,通过测量角加速度控制风机切换转向的时间点,并通过单片机计算姿态角,输出相应的PWM波控制风机转速,对风力进行调节.风力摆处于静止状态时,受到重力G的作用,系统状态处于竖直状态.当施加外力时,系统不再保持原有状态,如图2所示.空心杯电机旋转产生的风力使风力摆摆动,当摆杆与竖直方向呈角度θ时,电机产生相反的风力,使摆杆恢复到初始稳定状态.在风力摆万向节点B位置处,电机旋转产生如图2所示的风力F,因此必须由另一个与其相对应的电机提供一个相反的力,才能使摆杆做定长单摆运动,产生直线运动轨迹.通过设定的半径,利用PID算法计算出不同电机驱动信号的占空比,使电机产生一个做圆周运动的力,则风力摆做圆周运动.根据风力摆的摆杆长度或角速度,可以设置风力摆运动轨迹的半径值;或根据风力摆运动轨迹的半径计算出摆杆角度,利用PID算法调节进入单片机的角度值,通过改变PWM波调节电机转速,能够得到不同角度或不同大小的圆形运动轨迹,风力摆的角度分析如图3所示.设摆杆长度为L,设定圆的半径是R,则θ表示为:本系统的程序采用IAR编程软件,C语言编写而成,采用模块化结构设计,软件设计流程如图4所示.系统采用PID算法控制空心杯电机的转速,通过调节系统的比例参数来控制响应幅度,调节系统的积分参数来弥补响应的不足,调节系统的微分参数来提前预知系统的运动趋势,以减小系统误差,使系统形成一个闭环控制系统.通过陀螺仪实时采集当前风力摆姿态角状态,并与前一次的数据做差,计算出误差,利用电机制动使风力摆的运动状态发生改变,快速到达稳定状态.采用嵌入式编程思想,以优化操作界面显示,利于变量控制.在程序里开启了两个定时器,分别是TimeA和TimeB,TimeA负责数据的采集和显示,按键扫描;TimeB负责PWM波的输出,从而控制空心杯电机,若风力摆没有达到预先设定的轨迹,通过计算误差,反馈给电机,形成一个闭环控制系统.在数据采集时,直接采集十次数据放在数组里,通过冒泡排序法取出数据里面的最大值和最小值,再将剩下的数据求平均值,以减小采集数据误差[20].在实验室条件下对风力摆进行状态控制实验,结果表明风力摆能实现定长直线运动轨迹、圆周运动轨迹及快速制动,但由于系统受摆杆机械结构误差的影响,导致陀螺仪对摆杆的姿态数据采集部分存在较小误差;同时由于电机初始转速低,风力小,致使风力摆的摆动幅度小,因此难以实现对小角度的运动轨迹控制.设计的风力摆控制系统以MSP430F149单片机作为控制核心,实现了风力摆的运动轨迹控制,并且运动轨迹受外力作用影响发生改变时,风力摆系统可以通过单片机对直流电机的转速控制,实现自身调节快速恢复到原来的运动轨迹.【相关文献】[1]李慧君,张宇鑫,姚旭.基于单片机的风摆控制系统研究与设计[J].电力学报,2015,30(5):426-430.[2]孙蓉,李冰,权申明,等.基于风力摆的综合实训平台[J].实验技术与管理,2016,33(9):75-78.[3]王桔,洪梅.风力摆控制系统的设计[J].长春大学学报,2015,25(12):12-15.[4]苏宁远,张晨亮.基于MK60FN1MOVLQ15的风力摆控制系统设计[J].仪表技术,2016(8):23-25.[5]孙湉,张刚,邓彬伟,等.风力摆自动控制系统的设计及测试[J].湖北理工学院学报,2016,32(3):5-9.[6]杨平,王威.MSP430系列超低功耗单片机及应用[J].国外电子测量技术,2008,27(12):48-50.[7]沈建华,杨艳琴.MSP430系列16位超低功耗单片机原理与实践[M].北京:北京航空航天大学出版社,2008.[8]张军,陈慧丽.基于MSP430单片机和DS18B20的数字温度计[J].电子设计工程,2010,18(11):106-109.[9]张承岫,李铁鹰,王耀力.基于MPU6050和互补滤波的四旋翼飞控系统设计[J].传感技术学报,2016,29(7):1012-1015.[10]林宇,方方,林泽萍.基于MPU6050三轴倾角测控设计[J].数字技术与应用,2016(1):181.[11]谷丽华,崔畅,高松巍,等.基于MPU-6050的步态信号采集系统[J].沈阳工业大学学报,2015,37(2):176-182.[12]叶龙.基于MPU6050传感器的方位角倾角算法研究[D].长春:吉林大学,2015. [13]陶志成,张海.MPU6050和STM32L152的微功耗三维无线鼠标设计[J].单片机与嵌入式系统应用,2015(12):1-4.[14]冯大力.空心杯直流电机的特点及其应用[J].电工技术,1985,30(8):15-17.[15]钱儿.空心杯永磁同步电机控制系统研究[D].上海:上海大学,2009.[16]张青,阮健,李胜,等.空心杯直流伺服电-机械转换器控制器设计[J].轻工机械,2013,31(3):36-40.[17]孙绪才.L298N在直流电机PWM调速系统中的应用[J].潍坊学院学报,2009,9(4):24-26.[18]李付军.一种基于80C196KC和L298N的直流电机PWM控制技术[J].自动化技术与应用,2012,31(3):78-81.[19]孙会娟,张宁.大角度单摆运动的周期研究[J].北京联合大学学报:自然科学版,2006,20(4):73-75.[20]瞿朝成,达文姣,岳秋菊,等.基于链表的冒泡排序算法研究[J].甘肃高师学报,2011,16(5):33-34.。
论文题目:风力摆控制系统设计学生:庞刚学号:201206070422院(系):电气与信息工程学院专业:自动化124指导教师:郑恩让2016年 1 月 4 日风力摆控制系统庞刚(陕西科技大学电气与信息工程学院,陕西西安 710021)摘要:本组选择的是2015年大学生电子竞赛B题——风力摆控制系统。
针对于题目基础部分与发挥部分要求,设计了一个以飞思卡尔公司单片机MK60为控制单元、2对垂直放置的轴流风机组为执行器单元、陀螺仪传感器和加速度传感器以信息融合方式实现的(角度)传感器单元形成了一个三维空间的闭环控制系统(风力摆控制系统)。
在此基础上首先利用空间矢量法将被控量投影到X和Y 两个独立坐标上,分别利用相互独立的PID、FUZZY等控制方法实现风力摆系统系列动作。
实验表明:本竞赛小组设计制作的风力摆系统能够以较高的精度完成各种任务。
关键词:风力摆,MK60,轴流风机,角度传感器,空间矢量法,PIDWind pendulum control systemP ANG Gang(Shaanxi University of Science & Technology, Academy of electronic information and electricalengineering ,ShanXi Xi’an 710021)Abstract: The Undergraduate Electronic Competition in this group chose B question - Wind pendulum control system. For the base portion and play in the title part of the requirements, we designed a Freescale microcontroller MK60 control unit, two pairs of vertically disposed axial air units for the actuator unit, a gyro sensor and an acceleration sensor information fusion way to achieve (angle) sensor units form a closed loop control system of a three-dimensional space (wind pendulum control system). Firstly, on the basis of space vector will be charged the amount projected onto X and Y coordinates of two separate, independent of one another, respectively PID, FUZZY and other control methods to achieve a wind pendulum series of actions. Experimental results show that: The race team designed a wind pendulum system with high accuracy can complete various tasks.Keywords: Wind swing, MK60, axial fans, angle sensors, space vector, PID1 方案论证首先我们对该系统的结构及风力摆运动控制方案的比较论证。
风力摆论文报告WEIHUA system office room 【WEIHUA 16H-WEIHUA WEIHUA8Q8-风力摆控制系统(B题)摘要本风力摆控制系统主要包括单片机控制模块,液晶显示模块,直流电机,驱动模块以及姿态检测模块构成闭环系统。
其中控制模块采用STM32F103为控制芯片,直流电机为执行机构,电子调速器为电机驱动。
MPU6050采集风力摆姿态角,MCU处理姿态角数据后通过PID算法调节直流风机以控制风力摆快速画直线、摆角度,恢复静止的功能,并能按照要求画圆,在受风力影响后能够快速恢复画圆状态。
另外本系统采用OLED显示屏实现了友善方便的人机交互界面。
关键词:STM32F103 MPU6050 PID算法电子调速器?1系统论证与比较系统基本方案本系统主要由主控制模块、姿态检测模块、液晶显示模块,电机驱动模块和悬挂模块四部分组成,实现了风力摆控制系统。
系统框图如图1所示。
图1 风力摆控制系统总体框图姿态检测方案的论证与选择方案一:倾角传感器。
倾角传感器运用牛顿第二定律,根据定律,当倾角传感器静止的时候,由于物体的侧面还有垂直方向是受到其他力的作用,只有重力的作用,也就是说作用在它身上的就只有重力加速度了,所以由此产生的重力垂直轴与加速度传感器灵敏轴之间的夹角,可以用来测量相对于水平面的倾角变化量,就是我们所说的倾斜角。
但是倾角传感器侧重于静态测量,不适合检测运动物体的角度变化。
方案二:MPU6050。
MPU6050六轴传感器集成3轴MEMS陀螺仪和三轴MEMS 加速度计,每个轴对应有一个16位AD转换器。
正常工作时,陀螺仪和加速度计分别采集X轴,Y轴,Z轴的电压值,然后通过AD转换,转换成数字信号,最后通过I2C总线传送到控制芯片,但此时得到的值不是实际的角度和角速度值,还必须经过一定的比例关系进行转换,才能得到实际的角度和角速度值。
该传感器整合了6轴运动处理组件,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的封装空间。
风力摆控制系统方案简介风力摆控制系统是用来控制风力摆的运动的一种系统。
风力摆通常用于测量风力的强度和方向,以便在风能利用方面进行相应的调整和优化。
本文将介绍一个设计用于控制风力摆运动的系统方案。
目标本系统的目标是实现对风力摆的精确控制,使其可以随需要而停止、开始或改变方向。
通过控制风力摆的运动,可以提高其测量精度,并确保风能的高效利用。
系统组成本系统主要由下面几个组成部分构成:1. 风力摆风力摆是本系统的核心部件,它用于测量风向和风速。
风力摆通常由一个垂直铰接杆和一个悬挂在杆上的摆锤组成。
当风吹过摆锤时,摆锤会向相反方向摆动,从而使测量者能够通过观察摆动的幅度和方向来判断风的强度和方向。
2. 传感器为了实现对风力摆的控制,需要安装相应的传感器来检测风力摆的姿态和运动。
常用的传感器包括倾斜传感器和加速度传感器。
倾斜传感器用于检测风力摆的倾斜角度,而加速度传感器用于检测风力摆的加速度。
这些传感器可以提供给控制系统必要的数据,以便进行相应的控制。
3. 控制器控制器是系统中的核心部件,负责接收传感器的数据并根据设定的控制算法对风力摆进行控制。
控制器通常由微处理器或可编程逻辑控制器(PLC)组成,它可以根据需求改变风力摆的运动方向、幅度或停止风力摆的运动。
4. 电源与通信模块为了保证系统的正常运行,需要为系统提供稳定的电源。
另外,为了方便对系统进行监控和控制,还需要配备相应的通信模块,使得系统可以与外部设备进行数据传输和命令交互。
系统工作原理本系统工作的基本原理是通过控制器对风力摆进行精确控制。
控制器通过接收传感器提供的数据来判断当前风力摆的状态,并根据设定的控制算法采取相应的控制策略。
控制信号经过放大和处理后,通过执行机构控制风力摆的运动。
系统的工作流程如下:1.传感器采集风力摆的姿态和运动数据,并将数据传输给控制器。
2.控制器根据接收到的数据判断风力摆的状态,如姿态角度、加速度等。
3.控制器根据设定的控制算法,计算出相应的控制信号。
![电子设计大赛风力摆控制系统论文[B]](https://uimg.taocdn.com/994cd32b87c24028915fc3de.webp)
2015年全国大学生电子设计竞赛风力摆控制系统(B题)参赛队号:20152015年8月15日风力摆控制系统(B题)【本科组】摘要针对题目各项要求,采用软硬件结合方法设计风力摆控制系统。
以STM32单片机为主控制芯片、MPU6050传感器检测摆杆姿态角、利用PID算法调节电机驱动芯片输出合适的PWM波形驱动风机,通过OLED显示屏显示相关参数,按键输入数据等;机械结构满足设计要求,风力摆能够实现画直线、任意角度悬停、画圆等动作,在受外界干扰后能够自动恢复预定姿态。
具有良好的人机交互界面,各参数可动态调整,基本实现风力摆系统的自动控制。
关键词:风力摆、单片机、姿态角、PID算法目录一、系统方案 (1)1、系统控制方案的论证与选择 (1)2、控制芯片的论证与选择 (1)3、电源方案的论证与选择 (2)4、控制算法的选择 (2)二、系统理论分析与计算 (3)1、PID算法的分析 (3)2、风力摆的角度、加速度计算 (4)3、电机转速与风力摆控制分析 (4)三、电路与程序设计 (4)1、电路的设计 (4)(1)系统总体框图 (4)(2)电机驱动电路图 (4)(3)电源 (5)2、程序的设计 (5)(1)程序功能描述与设计思路 (5)(2)程序流程图 (6)四、测试方案与测试结果 (6)1、测试方案 (6)(1)硬件测试 (6)(2)硬件软件联和调试 (6)2、测试条件与仪器 (7)3、测试结果及分析 (7)(1)画直固定直线测试 (7)(2) 画不同长度直线测试,如表2所示。
(7)(3)画圆测试 (7)(4)测试分析与结论 (7)五、结论与心得 (8)六、参考文献 (8)附录1:电路原理图 (9)附录2:源程序 (10)一、系统方案本系统主要有STM32F103最小系统、电机驱动模块、陀螺仪加速度计传感器MPU6050、轴流风机、显示屏、机械结构、电源模块构成。
通过传感器实时的检测角度,通过PID算法根据角度是单片机输出合适的PWM波形,驱动电机驱动芯片带动轴流风机实现轴流风机转速的变化;轴流风机的注定在摆动轴的底部,有多个风机实现、风力摆的画直线、任意角度控制、围绕中心轴画圆等,在OLED显示屏屏上实现数据参数的实时显示,参数的实时调整。

电赛控制类风力摆论文 The latest revision on November 22, 20202015年全国大学生电子设计竞赛风力摆控制系统(B题)【本科组】2015年8月15日摘要本设计由MC9S12XS128MAL单片机控制模块、角度检测模块、人机交互系统以及风力摆机械结构组成的闭环控制系统。
由BTN7971驱动12V、1.2A的直流风机作为风力摆的动力源,MMA7361采集风力状态角,单片机处理状态角数据后通过PID调节直流风机控制风力摆,实现在直流风机作为动力控制下快速起摆、画线、恢复静止,画圆的功能。
为了使测控系统控制更为精确,在采集数据的过程中采用了非线性误差校正以及卡尔曼滤波等数据处理方法。
同时设计中考虑到可能存在的各种干扰因素,采用软硬件结合的抗干扰方法提高系统控制的稳定性。
经过反复的测验,该方案完全能够实现题目要求!关键字:单片机闭环风力摆控制系统卡尔曼滤波目录方案论证与比较系统主控芯片选择方案一:采用AT89C51系列单片机作为控制的核心。
51单片机价格便宜,应用广泛,I/O口的设置和使用操作简单。
但是51单片机的运行速度过慢,抗静电抗干扰能力弱,内部资源和存储器功能较少,而且无ADC,还需要用外接电路实现AD转换,使硬件电路变得复杂。
另外,51单片机完成系统功能较为困难。
方案二:采用MC9S12XS128MAL作为控制核心MC9S12XS128MAL是Freescale公司生产的16位单片机,储存功能强大,具有丰富的输入/输出端口资源,具有多种寄存器功能,而且端口引脚大多为复用口,具有多功能,所有端口都具有通用I/O口功能。
内部本身自带PWM、A/D 转换功能,可以直接用,省去了单独做PWM模块和A/D转换模块,节省大量时间。
完全能够实现本系统的所有功能。
综合考虑,本系统选择方案二风力摆动力系统方案选择根据题目要求,用2~4只直流风机,共有一下三种方案选择!方案一:采用两只风机作为系统动力系统。
风力摆控制系统方案1. 方案背景和目标随着可持续能源的需求日益增加,风力发电作为一种清洁、可再生的能源形式受到了广泛关注。
然而,由于风能的不稳定性和不可控性,风力发电系统的稳定性和可靠性成为限制其发展的一个关键因素。
为了解决这个问题,风力发电系统必须配备一个可靠的风力摆控制系统。
本文将介绍一种风力摆控制系统的方案,以帮助优化风力发电系统的性能。
2. 系统原理和组成部分风力摆控制系统的主要原理是通过控制摆角,调节风轮的旋转速率,以实现稳定的输出功率。
该系统由以下几个主要组成部分构成:2.1. 风轮风轮是风力发电系统的核心部件,它由多个叶片组成。
当风吹过叶片时,风轮开始旋转,并转化风能为机械能。
2.2. 摆角传感器摆角传感器用于监测风轮的偏移角度,并将这些数据反馈给控制器。
基于传感器的反馈,控制器可以调整风轮的旋转速度,从而在风能不稳定的情况下维持系统的稳定性。
2.3. 控制器控制器是风力摆控制系统的大脑,它接收来自摆角传感器的数据,并根据事先设定的控制算法进行计算。
通过对风轮的速度和角度进行调节,控制器确保系统能够自动适应不同风速和风向的变化。
2.4. 储能装置储能装置用于存储风能,以便在风力不足时提供稳定的电能输出。
常见的储能装置包括电池组、超级电容器等。
2.5. 电力输出风力摆控制系统最终的目标是通过电力输出将风能转化为可用的电能。
电力输出模块将经过控制器调节过的风轮旋转速度转化为电能,并将其连接到电网或其他电力设备。
3. 工作流程和控制算法风力摆控制系统的工作流程如下:1.摆角传感器检测风轮的摆角,并将数据发送给控制器。
2.控制器根据传感器数据和预设的控制算法进行计算。
3.控制器通过调节风轮的旋转速度,使风轮保持在适当的角度。
4.如果风速增加,控制器将增加风轮的旋转速度以提高系统的输出功率;如果风速减小,控制器将降低风轮的旋转速度以避免过载。
5.当风力不足时,储能装置将提供额外的电能,以维持系统的稳定性。
2015年全国大学生电子设计竞赛风力摆控制系统(B题)2015年8月15日摘要风力摆控制系统是一电机驱动测控系统,本系统以STC89C52单片机为控制核心,由轴流风机进行驱动,MPU6050三维角度传感器进行检测,应用PID控制算法,轴流风机调速使摆臂在一定角度范围内做自由摆及圆周运动,同时可以通过显示模块显示风力摆所处状态的各种参数。
本系统结构简洁分明,达到了赛题所要求的基本功能。
关键词:风力摆;STC89C52;轴流风机;PID;目录一、系统方案论证与选择 (1)1。
系统方案 (1)2。
方案比较与论证 (1)(1)控制模块的选择与论证 (1)(2)电机驱动模块的论证与选择 (1)(3)角度检测模块的论证与选择 (1)(4)显示方案的论证与选择 (2)二、系统理论分析与计算 (2)1。
机械结构的设计 (2)2.风力摆状态的检测与计算 (2)3.风力摆运动状态的分析 (3)4。
驱动与控制算法 (3)(1)电机驱动 (3)(2)控制算法 (3)三、电路及程序设计 (4)1.电路设计 (4)(1)风机驱动电路设计 (4)(2)显示模块 (5)2.程序设计 (5)四、测试结果与分析 (6)1.测试仪器 (6)2。
测试方案与结果 (6)(1)风力摆做自由摆动的测试 (6)(2)风力摆做幅度可控摆动的测试 (7)(3)静止状态恢复测试 (7)3.测试结果分析 (7)五、总结 (7)参考文献 (9)附录A 主要元器件清单 (10)附录B 电路原理图 (11)附录C 源程序 (12)一、系统方案论证与选择1。
系统方案本系统主要由单片机控制模块、电机驱动模块、角度检测模块、电源模块组成,键盘模块,显示模块组成。
2。
方案比较与论证(1)控制模块的选择与论证方案一:采用MSP430单片机MSP430系列单片机采用精简指令集结构,具有丰富的寻址方式,以及强大的处理能力并且具有超低的功耗。
在运算速度方面,能在8MHz 晶体的驱动下,实现125ns 的指令周期。
风力摆控制系统摘要:风力摆控制系统由五大部分组成,即控制单元、动力单元、检测单元、总线单元、电源和人机交互部分。
风力摆控制系统的控制核心STM32F103ZET6根据检测部分JY-901九轴角度传感器测得物体的位置信息和运动趋势,对直流轴流风机进行模糊PID控制,保证了系统的快准稳控制,采用串行总线传输信号,最终实现了风力摆的轨迹控制。
关键词:直流轴流风机、JY-901九轴角度传感器、STM32F103ZET6、模糊PID、串行总线。
引言:风力即是风的机械力,我们想用风力作为我们的唯一动力控制物体运动。
作为我们控制领域的一道难题。
2015年大学生电子设计大赛出了一道风力摆系统的题目,使研究锋利为动力的控制系统在大学生的控制领域展开,风力摆系统作为空气动力学我们需要系统的紧密配合才能做到对系统的控制。
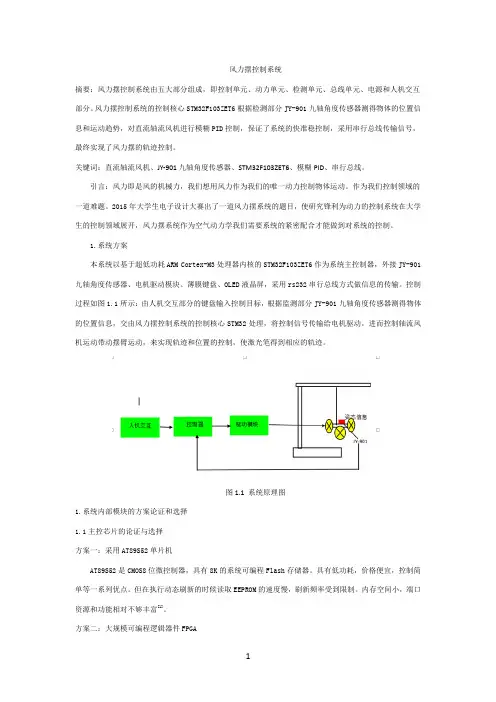
1.系统方案本系统以基于超低功耗ARM Cortex-M3处理器内核的STM32F103ZET6作为系统主控制器,外接JY-901九轴角度传感器、电机驱动模块、薄膜键盘、OLED液晶屏,采用rs232串行总线方式做信息的传输。
控制过程如图1.1所示:由人机交互部分的键盘输入控制目标,根据监测部分JY-901九轴角度传感器测得物体的位置信息,交由风力摆控制系统的控制核心STM32处理,将控制信号传输给电机驱动。
进而控制轴流风机运动带动摆臂运动,来实现轨迹和位置的控制,使激光笔得到相应的轨迹。
图1.1 系统原理图1.系统内部模块的方案论证和选择1.1主控芯片的论证与选择方案一:采用AT89S52单片机AT89S52是CMOS8位微控制器,具有8K的系统可编程Flash存储器。
具有低功耗,价格便宜,控制简单等一系列优点。
但在执行动态刷新的时候读取EEPROM的速度慢,刷新频率受到限制。
内存空间小,端口资源和功能相对不够丰富[1]。
方案二:大规模可编程逻辑器件FPGA目前,大规模可编程逻辑器件容量不断增大,速度不断提高,I/O口均在数百以上,也可以在不改变硬件电路的情况下改变功能。
风力摆控制系统摘要:本系统以MSP430F149单片机作为主控芯片,通过陀螺仪传感器MPU-6050检测风力摆的姿态信息,采用PID控制算法和互补滤波,实现了系统的最优控制,角度和X-Y轴等姿态信息的实时显示,使系统按照预期的轨迹运动。
本设计结构简单、可靠性高、操作方便、性能优良。
关键词:风力摆;MSP430F149; PID调节;互补滤波目录一、系统方案 (1)1、检测模块的论证与选择 (1)2、动力模块的论证与选择 (1)3、显示模块的论证与选择 (1)4、控制模块的论证与选择 (2)二、系统理论分析 (2)1、运动情况分析 (2)(1)水平直线运动 (2)(2)自动“归零”运动 (2)(3)圆周运动 (3)2、水平直线运动计算 (3)3、圆周运动计算 (3)4、PID调节和互补滤波 (4)三、电路与程序 (4)1、电路的设计 (4)(1)系统总体框图 (4)(2)供电子系统 (4)(3)检测模块 (5)(4)显示模块 (5)2、程序的设计 (5)(1)程序功能描述与设计思路 (5)(2)程序流程图 (6)四、测试方案与测试结果 (6)1、测试方案 (6)2、测试条件与仪器 (6)3、测试结果及分析 (6)(1)测试结果 (6)(2)测试分析与结论 (8)五、结论与心得 (8)六、参考文献 (8)风力摆控制系统(B题)【本科组】一、系统方案本系统主要由检测模块、显示模块、动力模块和控制模块组成,下面分别论证这几个模块的选择。
1、检测模块的论证与选择方案一:采用MMA7455加速度传感器检测平台倾角。
其核心为飞思卡尔公司的MMA7455L数字三轴加速度传感器,它通过数字输出,工作可靠。
但其8位模式限制了其测量精度,在测量微小的角度变化上误差较大,且7455不含陀螺仪,由此产生陀螺仪与加速器之间时间差的问题。
方案二:采用电位器检测摆杆倾角。
用电阻分压方式可以实现电位器对角度变化的感应。
但是必须经过模数转换才能将信号传给处理器处理,其灵敏度和模数转换器的精度都会对测量结果产生直接影响,误差很大。
目录一、任务与要求: ................................................................ - 1 -1.任务...................................................................................... - 1 -2.要求:.................................................................................. - 1 -二、系统框图及方案论证: ................................................ - 3 -1.系统框图: ...................................................................... - 3 -2.机械结构论证: ................................................................. - 3 -3.传感器选取: ..................................................................... - 5 -4.处理器选择: ..................................................................... - 5 -5.风机驱动选择: ................................................................. - 6 -三、单元模块设计: ............................................................ - 7 -1.硬件电路设计: ................................................................. - 7 -2.软件流程设计: ................................................................. - 8 -3.PID算法介绍...................................................................... - 8 -四、测试结果与分析: ........................................................ - 9 -1.测试仪器.............................................................................. - 9 -2.测试结果.............................................................................. - 9 -3.调试分析 ...................................................................... - 10 -五、设计总结: .................................................................. - 10 -六、参考文献: .................................................................. - 11 -1一、任务与要求:1.任务:一长约60cm~70cm的细管上端用万向节固定在支架上,下方悬挂一组(2~4只)直流风机,构成一风力摆,如图1-1所示。
2015 年全国大学生电子设计竞赛论文B 题:风力摆控制系统的设计2015年8 月15 日摘要该系统以高速单片机STC89C52R为控制核心,主要由物理框架、数据采集系统、主控系统、执行系统四大部分组成。
主控系统以高速单片机STC11F52X助核心,实现对执行系统对直流电机的控制,从而实现基于自由摆的摆动控制系统。
此方案可行性高,且精确度较高。
关键词:单片机( STC11F52X)E ,直流电机,风力摆摆动控制目录1、系统方案论证与选择 (1)1.1 控制系统的论证与选择 (1)1.2 供电系统的论证与选择 (2)1.3 风力摆角度调整系统的论证与选择 (2)2、系统理论分析与计算 (3)2.1 建模与控制方法 (3)2.1.1 基本部分的第一项控制方法 (3)2.1.2 基本部分的第二项控制方法 (3)3 、硬件电路设计与分析 (3)3.1 系统电路总体框图 (3)3.2 主要模块电路的设计 (4)3.2.1 继电器模块电路 (4)3.2.2 单片机模块电路 (4)4、测试方案与测试结果 (5)4.1 测试仪器 (5)4.2 测试方案以及结果...4.2.1 测试基本部分(1)4.2.2 测试基本部分(2).5、总结....................5.1硬件小结 ............5.2软件小结 ............5.3 心得体会 ........... 附录1电路原理图和PCB版图附录2主要元器件清单 (5) (5)...514 14 15 15 16 18风力摆控制系统(B题)【本科组】1系统方案论证与选择本任务要求设计制作一个基于风力摆测控系统,控制驱动各风机使风力摆按照一定规律运动,激光笔在地面上画出要求的轨迹。
据题目要求分析,我们得到基本思路,如图 1. i所示:图1. i 系统总体方案i.i控制系统的论证与选择方案1:用继电器来产生直流机的控制信号。
它是利用电磁效应实现电路开、关控制作用的原件,广泛应用在电子设备、仪器仪表及自动化设备中。
2015年全国大学生电子设计竞赛风力摆控制系统(B题)2015年8月15日摘要系统为由STC 12单片机控制模块、姿态采集模块、风力摆模块、液晶显示模块、人机交互系统以及风力摆机械结构组成的闭环控制系统。
MPU6050采集风力摆的姿态角,单片机处理姿态角数据后通过PID精确算法调节直流风机以控制风力摆。
本系统实现了风力摆在仅受直流风机为动力控制下快速起摆、画线、恢复静止的功能,并能准确画圆,且受风力影响后能够快速的恢复画圆状态,具有很好的鲁棒性,另外,本系统具有良好的人机交互界面,各参数及测试模式可有按键并通过液晶显示,性能好,反应速度快。
关键词:PID算法 MPU6050 STC 12单片机人机交互目录一、系统方案........................................ 错误!未指定书签。
1.1主控制器件的论证与选择...................... 错误!未定义书签。
1.2 姿势采集的论证与选择...................... 错误!未指定书签。
二、系统理论分析与计算.............................. 错误!未指定书签。
2.1 风力摆控制系统的分析...................... 错误!未指定书签。
2.2、基础部分功能实现的分析与计算.............. 错误!未指定书签。
2.2.1 基础一功能实现的分析与计算........... 错误!未指定书签。
2.3、发挥部分功能实现的分析与计算.............. 错误!未指定书签。
三、电路与程序设计.................................. 错误!未指定书签。
3.1电路的设计.................................. 错误!未指定书签。
3.2 基础部分系统框图与电路原理图............... 错误!未指定书签。
一种风力摆系统的设计唐晨光【摘要】文章介绍了风力摆控制系统的设计与制作。
系统以STM32为主控芯片,通过角度传感器MPU6050将三维数据传给单片机,单片机输出相应的PWM方波,通过电机驱动模块BTN7961控制轴流风机的风力大小,从而实现对风力摆控制系统的控制。
根据风力摆的数学模型分析,确定了万向节和摆杆之间的PID控制算法,并在实验中优化控制参数。
经反复试验,证明该系统实现了设计的要求。
%This paper describes the wind swing control system design and production system with STM32 mainly control chip. Through the angle sensor, this is the 3D data transfer to the microcontroller, microcontroller output corresponding PWM square wave, through the motor drive wind lfow fan module BTN7961 control shaft, in order to realize the control of wind pendulum control system. According to the mathematical model of the wind swing, the PID control algorithm between the universal joint and the swing rod is determined, and the control parameters are optimized in the experiment. Through repeated experiments, it is proved that the system has achieved.【期刊名称】《无线互联科技》【年(卷),期】2016(000)003【总页数】3页(P71-72,85)【关键词】STM32F103RCT6;角度传感器;电机驱动模块BTN7961;轴流风机【作者】唐晨光【作者单位】武昌工学院,湖北武汉 430065【正文语种】中文1.1 系统总体设计本系统硬件包括主控芯片STM32、角度传感器MPU6050、电机驱动模块BTN7961、摆杆、万向节及支架。
风力摆控制系统
摘要:本系统采用STM32F103ZET6单片机作为控制核心,通过对置于风力摆上的MPU9150陀螺仪采集的角度进行处理得到角度与风力摆位置的关系,再通过驱动输出PWM波控制轴流风机,使风力摆到达指定的位置,做规定的圆周运动。
本系统通过PID调试,测试表明,各项功能已达到或超过本题目要求。
关键词:MPU9150;PID;轴流风机
1.系统方案
本系统主要由主控制器,陀螺仪,电机驱动模块,轴流风机,激光笔组成,下面分别对这几个模块进行选择与论证。
1.1陀螺仪的选择
方案一:MPU6050。
9轴运动处理传感器,它集成了3轴MEMS陀螺仪,3轴MEMS 加速度计,以及一个可扩展的数字数字运动处理器DMP,可用I2C接口连接一个第三方的数字传感器,比如磁力计。
MPU-6050对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。
一个片上1024字节的FIFO,有助于降低系统功耗。
但零飘较严重。
方案二:角度传感器。
当连结到RCX上时,轴每转过1/16圈,角度传感器就会计数一次。
往一个方向转动时,计数增加,转动方向改变时,计数减少。
计数与角度传感器的初始位置有关。
当初始化角度传感器时,它的计数值被设置为0。
角度传感器一般测静态的角度,倾角用加速度计。
明显在本系统中角度传感器不如陀螺仪方便使用。
方案三:MPU9150。
MPU-9150 是采用系统级封装 (SiP),集合了两个芯片:MPU-6050 和 3 轴数字罗盘 AK8975,其中 MPU-6050 包含 3 轴陀螺仪、3 轴加速计以及能够处理复杂 9 轴 MotionFusion 算法的板载Digital Motion Processor™ (DMP™) 。
这款元件集成 9 轴 MotionFusion 算法,能够访问所有内部传感器,以收集全套传感器数据。
MPU9150测转角的速度的,可以积分得到转的角度,动态性能好,静态差,零飘基本无,很适合本系统。
综合考虑后决定采用方案三。
1.2轴流风机的选择
方案一:四线可测速、包含温控PWM调速轴流风机。
此种轴流风机一般重量较大,启动时间长,虽然风量大但明显不适合本系统的实时检测调整的思路。
方案二:三线可测速轴流风机。
此种轴流风机重量较轻,启动时间短,直接接驱动即可对其进行控速,风量也很大,比较符合题目各项要求的时间限制。
综合考虑后决定采用方案二。
1.3轴流风机个数与方位选择
方案一:两个轴流风机。
两个轴流风机的摆放有两种方式,背对摆放和呈直角摆放。
第一种方式只有两个方向的摆角,而垂直摆放则只有180°的摆角。
方案二:三个轴流风机。
三个轴流风机呈等边三角形摆放,虽360°都可以达到,但是每两个轴流风机的夹角是钝角,合成后的力大大减小。
方案三:四个轴流风机。
四个轴流风机两两垂直摆放,合力方向遍布360°,且合力的方向方便计算,合力的大小方便控制。
综合考虑后选择方案三。
1.4电机驱动的选择
方案一:ULN2003电机驱动模块。
高耐压、大电流复合晶体管IC—ULN2003,ULN2003 是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成。
ULN2003 工作电压高,工作电流大,灌电流可达500mA,并且能够在关态时承受50V 的电压,输出还可以在高负载电流并行运行。
ULN2003电机驱动模块电路简单,既可控制直流电机又可控制步进电机。
由于电流的限制,只能驱动小型电机。
方案二:可实现电机正反转及调速,启动性能好,启动转矩大,工作电压可达到36V,可持续工作电流2A,此题中可同时驱动两台直流电机。
TLP521-4光隔,L298N 有过电流保护功能,当出现电机卡死时,可以保护电路和电机等。
内含两个H 桥的高电压大电流全桥式驱动器,板载5V线性电源输出,纹波小,对单片机毫无干扰。
综合考虑轴流风机的工作电流,决定采用方案二。
2.系统理论分析与计算
2.1PID的原理与运用
PID即比例、积分和微分,比例单元(P)、积分单元(I)和微分单元(D)组成。
其输入e (t)与输出u (t)的关系为:
u(t)=kp[e(t)+1/TI∫e(t)dt+TD*de(t)/dt] 积分的上下限分别是0和t 因此它的传递函数为:
G(s)=U(s)/E(s)=kp[1+1/(TI*s)+TD*s]
其中kp为比例系数; TI为积分时间常数; TD为微分时间常数。
本系统中只用到了P和D,即比例和微分。
陀螺仪的读出的角度传递给PID 公式,PID公式计算后算出PWM值对电机进行调节。
Pitch的返回值对3、4号电机进行调节,roll的返回值对1、2号电机进行调节,这样就可以实现风力摆的360°的摆动。
2.2风力摆系统与其空间模型
风力摆的实际模型如图一所示,其建立的空间模型竖直截面如图二所示,横向截面如图三所示,风力摆空间模型如图四所示。
图一图二
如图二所示,根据直角公式可以得出h、θ与r之间的关系:θ
=h
r,
*
sin
又结构一定时,已知h的值,由角度传感器可以得出θ的值,所以r的值即可求出。
如图一与图三所示,本系统在摆杆的下方放置一十字形的木板平台,在其四
个相互垂直的方向放置四个相同型
号的轴流风机,四个轴流风机面向
外放置,当其一的轴流风机转动时,
摆杆则向其相反的方向摆。
例如,
仅仅轴流风机1转动时,摆杆则向
180°的方向摆动。
又相邻两个轴流
风机可以通过控制其PWM而得到不
图三同合力F,所以360°的方向都可以得到,在此理论基础上,风力摆在横截面上可以做圆周运动。
理论计算:设轴流风机的风力分别为F1、F2、F3和F4,对V1和V3的合力F 进行分析,F 的大小:2
321
F F
F +=
F 的方向: )arcsin(3
1F F =θ
空间方程建立: 图中θ是陀螺仪与摆杆(z 轴)的夹角,陀螺仪测出的Roll 与Pitch 分别是陀螺仪在xoz 平面的投影,以及陀螺仪在yoz 平面上的夹角;根
据几何推导,我们可以列出方程: 确定θ的值,将陀螺仪测出的Roll 和Pitch 分别代入PID 公式,整定参数,测得电机需要的PWM ,即可做圆周运动;α是电机(或陀螺仪)与Y 轴(0度测试线)的夹角,根据几何推导,我
们
图四 可以列出以下方程确定以上的α,可以得出Roll 和Pitch 的关系,代入PID 公式,整定参数,测得电机需要的PWM 值,即可按不同角度画直线。
2.3陀螺仪的原理
在3D 图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点,计算公式采用3D 笛卡尔坐标系,定义绕Z 轴、Y 轴、X 轴的旋转角度分别为Yaw 、Pitch 、Roll ,如图五所示, 通过旋转轴和绕该轴旋转的角度可以构造一个四元
数
:
)2cos(α=w ;)
cos()2sin(βαx
x =;
)cos()2sin(βαy
y =;)cos()2sin(βαz
z =。
其中α是绕旋转轴旋转的角度,
)cos(βx
,)cos(βy
,)cos(βz
为旋转轴在x,y,z 方向的分量(由此确定了旋转轴)。
本系统中根据陀螺仪得到的Pitch 、Roll 来的到风力摆的角度,返回给PID 。
3.总体设计
3.1系统构架与功能
本系统主要由激光笔,轴流风机,L298N电机驱动,矩阵键盘等组成。
STM32F103ZET6接收到陀螺仪收到的欧拉角,再进行PID调节得到PWM,将PWM返回到轴流风机,轴流风机控制转速使风力摆达到不同的角度,陀螺仪实时检测。
如图六所示。
图六
3.2硬件电路图
图七为驱动L298N的电路图,图八为MPU9150的电路图。
图五。