WalkLt开发说明
- 格式:doc
- 大小:251.00 KB
- 文档页数:36
标题:深入探索Golang中的Walk编译方法在Golang中,Walk编译方法是一种高效的编译方式,它能够快速有效地遍历目录和文件,并进行相关操作。
本文将深入探讨Golang中的Walk编译方法,以帮助读者更好地理解和应用此技术。
一、Golang中的Walk编译简介Golang中的Walk编译是一种用于遍历目录和文件的方法,它可以帮助开发者高效地处理文件系统中的数据。
在使用Golang进行文件操作时,Walk编译方法能够帮助我们快速遍历目录和文件,实现文件的搜索、筛选和处理等操作。
1. 使用Walk编译方法的基本语法在Golang中,使用Walk编译方法可以通过标准库的filepath包来实现。
基本的Walk编译方法语法如下:```func Walk(root string, walkFn filepath.WalkFunc) error {// 遍历文件操作}```在这里,root代表要遍历的根目录,walkFn是一个函数,用于处理遍历过程中的每一个文件或目录。
2. Walk编译方法的应用场景Walk编译方法在Golang中有着广泛的应用场景,例如文件搜索、批量处理、文件备份等。
通过Walk编译方法,我们可以快速有效地处理文件系统中的数据,实现各种复杂的文件操作需求。
二、深入理解Walk编译方法除了基本的使用语法外,我们还需要深入理解Walk编译方法的实现原理和内部机制,以便更好地应用此技术。
1. Walk编译方法的实现原理在Golang中,Walk编译方法通过递归遍历文件系统中的每一个目录和文件,并对其进行相应的操作。
通过递归调用Walk编译方法,我们可以实现对整个目录结构的遍历,从而实现对文件系统的全面处理。
2. Walk编译方法的性能优化在实际应用中,我们需要注意Walk编译方法的性能优化问题。
遍历大型文件系统时,我们可以采用并发的方式进行遍历,以提高遍历效率。
还可以通过缓存机制等手段来优化Walk编译方法的性能。
walkthrough method方法简化解释
Walkthrough method是软件开发中常用的一种技术,用于检测
和调试代码中的错误。
该方法通过模拟用户的操作来检查程序的功能,以确保程序的正确性和可靠性。
下面是walkthrough method方法的
简化解释:
1. 步骤性检查:使用walkthrough method方法时,程序员会一步一步地检查代码,确保代码中没有任何潜在的错误。
这意味着代码中的每一行都会被仔细检查,以确保其正确性。
2. 预测问题:walkthrough method方法还可以用于预测程序中可能出现的问题。
程序员可以模拟用户在使用程序时可能遇到的情况,以便识别和解决任何潜在的问题。
3. 评估代码:walkthrough method方法还可以用于评估代码质量。
程序员可以通过使用该方法来评估代码的可读性、可维护性和可扩展性等方面,以便更好地优化代码。
总之,walkthrough method方法是一种重要的技术,可以帮助程序
员检测和修复代码中的错误,并提高程序的质量和可靠性。

怎样用swift制作一个滑出的导航控制面板向右滑出一个导航控制面板。
这个教程会展示给你如何制作一个侧滑导航面板,就像是facebook或者IOS apps的侧滑页面。
滑出式导航页面的设计模式准许开发者添加永久性导航到应用程序上,而无需占用宝贵的屏幕空间。
用户可以选择在任何时间显示导航栏,同时还可以看到当前的内容。
在这个教程中,你会发现,制作一个侧滑导航面板没有你想象的那么复杂。
准备开始这次要做的项目是关于一个小猫小狗照片的侧滑导航栏,准备开始,你需要先下载一些“开始文件--starter project for this tutorial”,这是一个zip的文件,将它保存到一个方便的地方,这样方便找到你的项目。
打开Xcode, 你会发现Resources文件包含了所有的小猫和小狗的照片,这些照片是用来显示到app里的。
你还会发现,总共有3个主视图控制器。
当你想把这个教程运用到你的项目里,有以下几点是你需要牢记的:1. ContainerViewController: 这就是奇迹发生的地方!它包含了左视图,中心视图和右视图控制器,然后用动画和滑动来操控。
在这个项目里,它在application(_:did-FinishLaunchingWithOptions:)创建并添加了一个窗口在AppDelegate.swift2.CenterViewController: 中心面板,这个可以被你自己的视图控制器代替(确保你copy了所有的按钮actions).3.SidePanelViewController: 使用左面板和右边面板,这样可以用你自己的视图控制器来代替。
所有的视图控制器都在Main.storyboard里定义过,所以你可以快速的看一遍storyboard, 然后知道这个app大概是什么样子的。
现在,你已经对这个项目的结构非常熟悉了吧,我们准备开始咯!找到你的中心视图管理器在这个部分,你需要找到CenterViewController,在ContainerViewController里面,就像是一个子控制器。
WalkToolBox说明
WalkToolBox分为四级:
1.WalkToolBox——根节点。
不可删除。
2.ToolBox——工具箱
3.ToolSet——工具集
4.Tool——工具
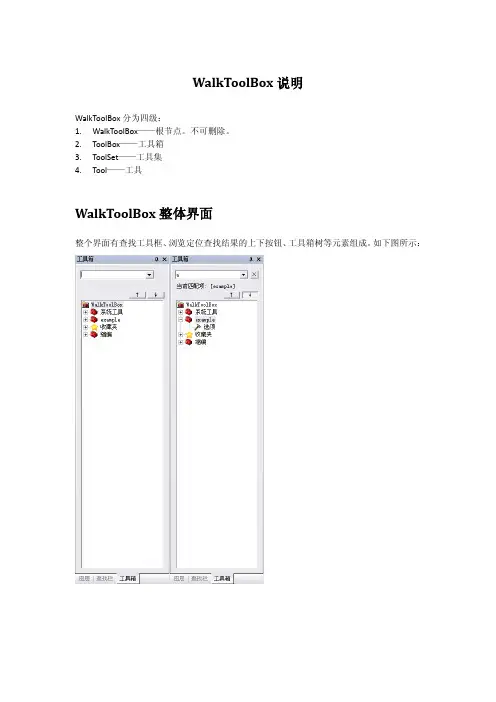
WalkToolBox整体界面
整个界面有查找工具框、浏览定位查找结果的上下按钮、工具箱树等元素组成。
如下图所示:
WalkToolBox
WalkToolBox为工具树的根节点,不可删除。
可以新增工具箱,加载已有的Walk工具箱配置文件(xml格式),同样可以另存为一份配置文件。
右键菜单如下图所示
ToolBox
ToolBox中可以添加工具集,也可以直接添加工具,目前可以添加的工具类型有脚本与菜单命令。
右键菜单如下图所示
ToolSet
ToolSet为工具集。
工具集中可以添加工具(脚本、菜单命令),也可以再添加工具集。
右键菜单如下图所示
Tool
Tool为工具节点。
执行工具(脚本、菜单命令)。
右键菜单如下图所示
添加工具-脚本
弹出选择脚本对话框,勾选脚本,添加到当前节点上。
添加工具-命令
弹出设置命令对话框,可以选择提供的菜单及命令。
WalkToolBox结构
WalkToolBox结构存储在WalkToolBox.xml文件中。
WalkToolBox结构如下图所示:。
健康计步器使用Flutter和Dart语言开发的小程序健康已经成为现代人生活不可或缺的一部分。
为了帮助人们更好地管理自己的健康,计步器应运而生。
计步器是一种能够记录和统计人们行走步数的小工具。
随着科技的发展,计步器也逐渐发展成为了小程序的形式。
本文将介绍如何使用Flutter和Dart语言开发一个健康计步器的小程序。
一、引言健康计步器是一种非常实用的工具,它可以帮助人们了解自己每天的运动状况,激励人们积极参与运动。
而基于小程序的健康计步器则更加便携和易于使用。
Flutter和Dart语言是一组强大的开发工具,可以帮助开发者快速开发出功能强大、界面美观的小程序。
二、技术概述Flutter是一种开源的移动UI框架,由Google推出。
它使用Dart语言作为开发语言,可以快速构建高性能、高质量的移动应用程序。
Dart 是一种可快速编译为本地代码的面向对象语言,具有优雅、高效和可扩展的特点。
三、项目准备首先,我们需要准备好开发环境。
安装Flutter SDK,并配置好开发环境。
然后,在命令行中运行以下命令,创建一个新的Flutter项目:```flutter create health_pedometer```四、界面设计接下来,我们需要设计健康计步器的界面。
根据需求,我们需要一个简洁美观的界面,能够显示当前步数和其他相关信息。
使用Flutter的Widget库,我们可以很容易地创建出各种复杂的界面元素。
例如,我们可以使用Container来创建一个状态栏,使用Text来显示步数等。
五、计步算法健康计步器的核心功能是识别用户的步行动作并计数。
在Flutter中,我们可以使用加速度传感器来检测用户的步行动作。
首先,我们需要在pubspec.yaml文件中添加sensor库的依赖:```dependencies:sensors: ^0.5.8```然后,在代码中引入sensor库并使用加速度传感器监听器来检测步行动作:```dartimport 'package:sensors/sensors.dart';var stepCount = 0;var isWalking = false;accelerometerEvents.listen((AccelerometerEvent event) {if (event.y > 15 && !isWalking) {stepCount++;isWalking = true;} else if (event.y < 10 && isWalking) {isWalking = false;}});```通过监听加速度传感器的数据,我们可以根据用户的动作状态来判断是否进行步数计数。

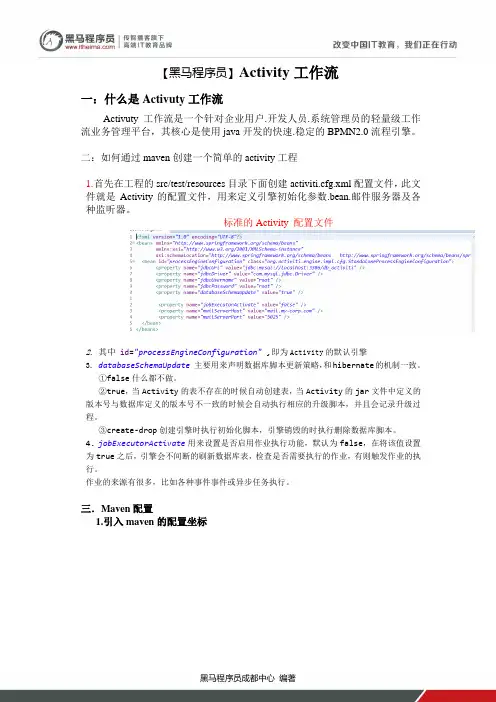
【黑马程序员】Activity工作流一:什么是Activuty工作流Activuty工作流是一个针对企业用户.开发人员.系统管理员的轻量级工作流业务管理平台,其核心是使用java开发的快速.稳定的BPMN2.0流程引擎。
二:如何通过maven创建一个简单的activity工程1.首先在工程的src/test/resources目录下面创建activiti.cfg.xml配置文件,此文件就是Activity的配置文件,用来定义引擎初始化参数.bean.邮件服务器及各种监听器。
标准的Activity 配置文件2.其中id="processEngineConfiguration" ,即为Activity的默认引擎3.databaseSchemaUpdate主要用来声明数据库脚本更新策略,和hibernate的机制一致。
①false什么都不做。
②true,当Activity的表不存在的时候自动创建表,当Activity的jar文件中定义的版本号与数据库定义的版本号不一致的时候会自动执行相应的升级脚本,并且会记录升级过程。
③create-drop创建引擎时执行初始化脚本,引擎销毁的时执行删除数据库脚本。
4.jobExecutorActivate用来设置是否启用作业执行功能,默认为false,在将该值设置为true之后,引擎会不间断的刷新数据库表,检查是否需要执行的作业,有则触发作业的执行。
作业的来源有很多,比如各种事件事件或异步任务执行。
三.Maven配置1.引入maven的配置坐标四.编写测试类①:在src/test/resources创建bpmn文件和png文件Bpmn文件:1.生成Activity所需要的25张数据库表2.生成流程实例3.查询定义的流程4.删除流程5.查看流程定义的图标。
跑步计步器(Android应用使用Java开发)Android应用的鼎盛发展给人们的生活带来了诸多便利和娱乐方式,如今,越来越多的人开始注重健身和跑步。
跑步计步器作为一种常见的运动辅助工具,可以帮助用户记录跑步的时间、距离和步数等信息,同时还可以提供个性化的训练计划和健身建议。
本文将介绍如何使用Java语言开发一款Android跑步计步器应用。
一、准备工作在开始开发之前,我们需要安装Android Studio开发环境并配置好Java开发环境。
然后,新建一个Android项目,选择合适的包名和项目名称,并选择最低支持的Android版本。
二、界面设计跑步计步器的用户界面通常包含以下几个主要元素:1. 计步显示区:用来显示当前跑步的步数和跑步的时间。
2. 距离显示区:用来显示当前跑步的距离。
3. 开始/停止按钮:用户点击开始按钮后,计步器开始记录用户的步数和时间;点击停止按钮后,计步器停止记录并显示最终的统计结果。
4. 训练计划按钮:用户可以点击该按钮查看个性化的训练计划和健身建议。
5. 设置按钮:用户可以点击该按钮进行一些基本设置,如单位设置、目标步数设置等。
针对以上的需求,我们可以设计一个简洁美观的界面。
可以尝试使用LinearLayout和RelativeLayout等布局管理器来实现页面的布局和组件的排列。
三、计步功能实现1. 获取传感器权限:在AndroidManifest.xml文件中添加获取传感器权限的声明,以便应用能够通过传感器获取步数信息。
2. 获取传感器对象:在Java代码中使用SensorManager类的getDefaultSensor()方法获取传感器对象,并注册一个传感器事件监听器。
3. 传感器事件监听器的实现:定义一个实现SensorEventListener接口的类,重写onSensorChanged()方法,在该方法中实现对步数的监听和更新。
4. 步数统计和显示:根据传感器返回的数值进行步数的统计,并将结果实时显示在界面的计步显示区。
兄弟连区块链培训教程图形用户界面1:初识Walk很多人喜欢Go语言,其实是因为Go语言有其独特的语言属性在支撑着其在编程语言界的发展,今天兄弟连Go语言+区块链培训老师给大家介绍一下关于Go语言图形用户界面1:初识Walk,下面我们一起来看一下吧。
Go与GUI——GO语言的图形界面WalkGO没有原生的界面库,所以不能直接用来写GUI界面。
但最近互联网上已经涌现出不少成熟、好用的第三方界面库。
使用它们,就同样可以写出同C#、C++的界面。
而且效率还更胜一筹。
关于Walk界面库(官方介绍):Walk是一个写给Golang的Window应用程序库套件,它主要用于桌面GUI的开发,但也有更多的东西。
安装Walk在浏览这部分前,请确定已经配置安装完毕go语言的环境。
如果没有,可以参考go 官网的Install帮助。
另外,注意:这个Walk库只能运行在Go 1.1.x及以上。
要安装Walk很简单,只要运行命令:go get /lxn/walk等待命令执行完毕,这时候检查GOPATH的src与pkg下,是否有符合自己计算机环境的walk目录。
(我的电脑的CPU架构为AMD64,则会在%GOPATH%\windows_amd64\\lxn下出现一个walk文件夹与编译完成的a文件,另外在%GOPATH%\src\\lxn下也会出现walk的源代码)我们还要安装一个工具rsrc,以完成后期的打包工作,执行命令:go get /akavel/rsrc等待命令执行完成,然后检查,步骤与上文相仿,不再多说。
实例导入依赖import (//引入walk包"/lxn/walk"//declarative包下包含大量控件,加一个点:使用包内的成员时可以省略包名."/lxn/walk/declarative""strings")官方的入门Demofunc main() {//声明两个文本域控件var inTE, outTE *walk.TextEdit//配置主窗口,并运行起来MainWindow{//窗口标题Title: "尖叫的Demo",//可拉伸的最小尺寸MinSize: Size{600, 400},//主布局:垂直布局Layout: VBox{},//窗口中的所有控件Children: []Widget{//水平分割器(水平小布局)HSplitter{//局部水平排列的控件们Children: []Widget{//文本输入框TextEdit{//绑定到inTE变量AssignTo: &inTE},//文本输出框TextEdit{AssignTo: &outTE,//只读的文本框ReadOnly: true},},},//普通按钮PushButton{//按钮文本Text: "动动我试试",//响应函数OnClicked: func() {inputStr := inTE.Text()outputStr := strings.ToUpper(inputStr)outTE.SetText(outputStr)},},},}.Run()}。

GoWalk 教程-第⼀个GoWalk 程序⼀、第⼀个 Go Walk 程序编译:go build -ldflags="-H windowsgui"MainWindows 常⽤属性:TiTle 标题,Size 尺⼨Layout 排列⽅式VBox(垂直排列)、HBox(⽔平排列)ContextMenuItems ,上下⽂菜单 ,[]MenuItem 类型Children 控件列表,[]Widget 类型MenuItems 主菜单列表 ,[]MenuItem 类型ToolBarItems ⼯具栏列表 ,[]MenuItem 类型⼆、变量:变量声明Go 语⾔引⼊了关键字 var ,⽽类型信息放在变量名之后,⽰例如下: var 关键字可以将若⼲个需要声明的变量放置在⼀起,避免重复,如下所⽰:变量初始化第三种i3⾃动识别为int 类型12345678910111213141516171819package main import ( . "/lxn/walk/declarative")func main() { mainWindow.Run()}var LableHello=Label{ Text: "Hello world!",}var widget=[]Widget{ LableHello,}var mainWindow=MainWindow{ Title:"MainWindow", MinSize:Size{400, 200}, Layout:VBox{}, Children:widget,}12var i int var str string1234var ( i int str string )123var i int = 10var str = "Hello"i3 := 10注:当定义全局变量时不能⽤第三种⽅法有相同类型的多个变量同样可以在⼀⾏内完成声明:var x, y int让 x 和 y 都是 int类型变量。

快步系统开发,开发find小练153微6064电3173软件,快步APP开发软件源码介绍Sometimes your plans don’t work out because God has better ones.Being single is better than being in an unfaithful relationship.If you find a path with no obstacles,it probably doesn’t lead anywhere.The future is scary but you can’t just run to the past cause it’s familiar.I love it when I catch you looking at me then you smile and look away.快步系统简介:新人实名注册送一双新手跑鞋,有效期45天,可收获13个跑豆,通过完成任务获得更多的跑豆兑换更高级的跑鞋。
用户兑换高级跑鞋、创建俱乐部、组队运动、推广好友获得体力值用户通过提升贡献值来提升会员等级,实名认证后即为一级。
升级到2级需要贡献值≥100点;升级到3级需要贡献值≥200点;升级到4级需要贡献值≥2000点;升级到5级需要贡献值≥5000点。
交易规则介绍:会员等级1级手续费50%,会员等级2级手续费35%,会员等级3级手续费30%,会员等级4级手续费25%,会员等级5级手续费23%,星级达人升级介绍一级跑将:直推20人,团队总体力值500点,赠送1级跑鞋一双,参加交易5%。
二级跑将:直推20人,团队总体力值2000点,大区除外,小区体力要达到400点,送B级跑鞋。
参加交易20%!三级跑将:直推20人,团队总体力值8000点,小区体力值达到2000,送C级和D级跑鞋。
参加交易5%!四级跑将:直推20人,团队总体力值10W,小区达到25000,送E级跑鞋三双和F级跑鞋一双。
【转】Velocity入门教程EasyJWeb-Velocity脚本简明教程“简易、实用才是硬道理”、“让J2EE应用开发变得更加轻松、简单”很多人下载了EasyJWeb的开源应用示例,但是对动态页面模板文件中的标签使用不是很熟悉,这里简单介绍一下。
EasyJWeb特定把视图限定为Velocity,因为我们觉得在Velocity在表现上从可维护性、简洁性乃灵活性上,比JSP及其它视力技术表现强得多。
虽然我们可以非常简单把EasyJWeb扩展成支持多种视力技术,但当前我们不打算这样做!使用EasyJWeb的目的,是在于把页面-程序完成分开,就也就是一个项目中,程序员使用专业Java开发工具(如Eclipse、JBuilder等)来编写、调试、测试程序,页面制作人员使用专业的网页制作工具(如Macromedia Dreamweaver)来设计制作网页,而两者之间的协调通过一个规范的接口协议来解决。
需要在页面里面加如一些标签,来生成动态内容,这一工作可以交由网页制作人员来完成。
因为使用Velocity 作为视图,由于他的语法、功能及使用方法都比较简单,因此一般情况下,一天以内就能让页面制作人员熟练掌握其用法。
Velocity是一个基于java的模板引擎(template engine),它允许任何人仅仅简单的使用模板语言(template language)来引用由java代码定义的对象。
作为一个比较完善的模板引擎,Velocity的功能是比较强大的,但强大的同时也增加了应用复杂性。
一、基本语法1、"#"用来标识Velocity的脚本语句,包括#set、#if 、#else、#end、#foreach、#end、#iinclude、#parse、#macro等;如:#if($info.imgs)#else#end2、"$"用来标识一个对象(或理解为变量);如如:$i、$msg、$TagUtil.options(...)等。
moveit用法-回复《moveit用法:简单、高效、精确的机器人运动规划库》引言:在现代工业和服务机器人的应用中,机器人运动规划是一个至关重要的任务。
机器人需要通过精确的路径规划和轨迹生成来实现各种操作,例如将物体从一个位置移动到另一个位置,避开障碍物完成复杂任务等。
Moveit作为一个功能强大的开源库,为机器人运动规划提供了丰富的工具和功能,可帮助开发人员轻松、高效地实现机器人运动控制。
本文将详细介绍Moveit的用法,并通过实例展示其强大的功能。
第一部分:Moveit概述Moveit是基于ROS(机器人操作系统)的一个开源软件包,为机器人运动规划提供了一系列的功能和工具。
它不仅提供了运动规划算法,还包括了运动学、碰撞检测、3D场景可视化等功能。
Moveit支持各种类型的机器人,包括包括移动机器人、工业机器人和服务机器人等。
与其他运动规划库相比,Moveit具有易用性、精确性和高效性。
第二部分:准备工作在开始使用Moveit之前,需要进行一些准备工作。
首先,需要确保机器人的运动学模型和描述文件已经创建好,并且可以通过ROS进行控制。
其次,确保机器人的硬件连接和驱动正常工作,并在ROS中完成相关的配置。
最后,安装Moveit软件包,并将其与ROS系统集成。
第三部分:Moveit功能介绍1. 运动规划器(Motion Planner):Moveit提供了几种不同的运动规划算法,如RRT(快速随机树)、RRT*(快速随机树增强版)、OMPL (开放运动规划库)等。
这些算法可以根据机器人的特性和任务需求选择,用于生成机器人的路径和轨迹。
2. 运动学计算器(Kinematics Solver):Moveit具有内置的运动学计算器,可用于解决机器人的逆运动学问题。
通过给定目标位置和姿态,运动学计算器可以计算出机器人的关节角度,从而实现精确的位置控制。
3. 碰撞检测器(Collision Checker):Moveit的碰撞检测器可以检测机器人是否与周围环境或其他机器人发生碰撞。
Autoit快速开发指南2012年9月6日Autoit开发指南启动程序启动exe类型文件,一般使用Run函数Run(“路径”)如:序运行的工作目录Run(“路径”,”工作目录”)如:启动lnk,txt等文件一般使用ShellExecute函数该函数除了可以指定工作目录外,还可以设置启动参数1.窗口操作窗口处理一般都是针对Windows GUI窗口的操作,常用的如下:的帮助文档。
下面是一个例子,一般在很多地方用到,特别是程序启动或者运行到某个步骤,等待其他窗口处理,一般采用以下脚本判断等待时间”),否则,如果该窗口处于非激活状态,会使脚本一直等待直到超时,按照非预设的流程解析运行下去,得不到预期结果。
1.菜单操作菜单点击使用WinMenuSelectItem函数Windows GUI),可以在工具栏查找该菜单的快捷启动按钮或者通过发送快捷键进行控制3.工具栏操作对于工具栏快速按钮,可以使用ControlCommand函数处理,菜单操作中很多快捷方式一般都放在工具栏中,这种情况可以多一个选择。
控件。
控件ID需要通过Windows Info工具获取。
5.1文本框在文本框输入数据使用:ControlSetText(“标题”,"",”控件名或ID” ,”输入的字符串数据”)如果需要获取文本框的数据,则使用ControlGetText(“标题”,"",”控件名或ID”) ControlSetText和ControlGetText可以操作单行文本框,密码输入框,多行文本框等。
5.2选择控件选择控件使用ControlCommand函数操作,可以操作单选多选以及单行多行下拉选择(ComboBox和ListBox)等控件。
如选择下拉框的某个选项:合来操作选项,如下面是获取所有选项数据的例子:1.点击操作6.1控件点击控件点击一般使用:此外还可以在函数后面添加坐标,这对于占用屏幕区域比较大的时候,精确点击某个位置触发其他操作比较重要比如在一个表格中,需要右击某一行记录,弹出右键菜单的情况。
二步路开发文档一、介绍二步路是一种新型的导航系统,旨在提供更高效、更准确的导航体验。
它采用了先进的算法和技术,通过两步操作即可得到最佳的路线规划结果。
本文将详细介绍二步路的开发过程和相关技术。
二、功能二步路的主要功能包括以下几个方面:1. 地图展示用户可以在二步路上查看各种地图信息,包括街道、建筑物、交通情况等。
地图展示功能需要与地图数据提供商进行合作,获取地图数据,并在前端进行展示。
2. 路线规划二步路可以根据用户输入的起点和终点,通过算法计算出最佳的路线规划结果。
路线规划功能需要考虑诸多因素,如道路拥堵情况、交通信号灯等,以确保用户得到最优的导航方案。
3. 实时导航在用户进行导航过程中,二步路可以提供实时导航功能,即根据用户的当前位置和导航路线,提供导航指引,帮助用户准确到达目的地。
实时导航功能需要与定位服务进行集成,获取用户的实时位置信息。
4. 语音提示为了提高用户的导航体验,二步路还可以通过语音提示的方式,向用户提供导航指引。
语音提示功能需要与语音合成技术进行集成,将文字转换为语音,并输出给用户。
三、开发步骤二步路的开发可以分为以下几个步骤:1. 数据获取在地图展示和路线规划功能中,需要获取地图数据和交通信息。
可以与地图数据提供商合作,获取相应的数据接口,并通过API调用获取所需数据。
2. 前端开发前端开发主要负责地图展示和用户界面设计。
可以使用HTML、CSS和JavaScript等技术进行开发,通过地图API将地图数据展示在前端页面上,并与用户进行交互。
3. 后端开发后端开发主要负责路线规划和实时导航功能的实现。
可以使用Java、Python等编程语言,通过算法计算最佳路线,并将结果返回给前端。
同时,需要与定位服务进行集成,获取用户的实时位置信息。
4. 语音合成语音合成功能可以通过调用语音合成API实现。
将导航指引的文字转换为语音,并输出给用户。
可以选择合适的语音合成技术和API供应商进行集成。
题目:地图缩放和全图要求:1、实现全图命令(在可见区可全视所有可见层的地物和文字)2、通过鼠标滚轮缩放(以光标点为缩放中心,向外滚动为放大,向内缩小,滚距1.25倍)详见后面的说明。
WalkLt程序结构工作空间层地物式样自定义式样文字和影象标注选中集Walk数据库Walk几何外包盒地物几何的外包盒Box,是一个矩形:Point _min; //矩形的左下角坐标Point _max; //矩形的右上角坐标地物几何walkGeometry的主要函数构造函数:GM_Object();GM_Object(Point &); 构造一个点几何GM_Object(const GM_Object &); 从一个几何中构造GM_Object(BYTE* bin); 从数据库读取的地物几何来构造创建几何:Void Create(Point& pt1,Point& pt2,wkLineType linetype = wkLineTypeStraight);void Create(walkParts& wkParts,BOOL bRing=FALSE);void Create(CPointArray& pts,BOOL bIntoPoly = FALSE,wkLineType linetype = wkLineTypeStraight);void Create(Box* pBox,BOOL bRing=FALSE);释放几何内的数据:void DeleteContent();获取几何类型:wkbGeometryType GetType();几何中的元素类型(OR 值)// 1--有点// 2--有线// 4--有面int GetElementsType();是否包含有非折线线型的线条BOOL bWithCurve();几何的周长和面积double GetPerimeter();double GetArea();获得元素个数int GetPolygonCount();int GetPartsCount();int GetPointCount();获得元素(指针)walkPolygon *GetOriginalPolygonAt(int nPolygonAt);walkParts* GetOriginalPartsAt(BOOL *bRing=NULL,int nIndex=0);walkPoint* GetPointAt(int nIndex);插入元素:BOOL InsertPolygon(walkPolygon &rPoly);BOOL InsertPartsAt(walkParts& parts, int nIndex=-1,BOOL bRing=FALSE);BOOL InsertPointAt(Point pt, int nIndex=-1);有向点:BOOL IsDirectPoint();// 获取有向点在this中指针位置,以及方向// 方向:以弧度为单位,以横轴起算,逆时针为正Point *GetOriginalDirectPoint(double &fDirectRad);// 更新this为有向点(点位和方向)// fDistRef用于计算方向参考点,默认为1个实际单位BOOL SetDirectPoint(Point pt,double fDirectRad,double fDistRef=1.0);顺向/反向:BOOL PutGMInOrder();BOOL PutGMInOtherOrder();外包盒:Box envelope();型心点Point centroid();九交关系:wk9iResult Get9iGMObject(GM_Object* pObj2, double eps);点在Walk中点为三维坐标点,定义为:struct Point{double x, y, z;};线线以及多边形的环均表达为walkParts,由首尾相接的线条(walkPoints)组成。
所以在Walk中可将运动场跑道表达为一个walkParts线。
对于环,walkParts必须闭合。
walkParts的主要函数:构造函数:walkParts(DWORD numPoints, walkPoints *ptss);释放空间:void DeleteContent();是否闭合:BOOL IsClosed();void MakeClose();是否顺时针:BOOL IsClockwise();void Reverse();子元素个数:int GetPointsCount();获取数据(指针):walkPoints* GetOriginalPointsAt(int pos=0);插入数据:BOOL InsertPointsAt(walkPoints& points, int pos=-1);折线化:int Discrete(double eps=EPS_ZERO);获取周长:double GetPerimeter();折线化:void GetDiscreteToPnts(CPointArray& pnts, double scale);线段数:int GetSegmentCount();获取线段:seg中的m_seg为指针位置,调用者不得删除之.BOOL GetSegment(int nSegAt, CsSegment &seg);线条线条由点按同线型连接而成,walkPoints的主要函数:构造函数:walkPoints();walkPoints(wkLineType lType,DWORD nPoints,const Point *pts);释放空间:void DeleteContent();获取线型:wkLineType GetLineType();void SetLineType(wkLineType lType);enum wkLineType {wkLineTypePoint =0, //点wkLineTypeStraight =1, //折线wkLineTypeBezier =2, //Bezier样条; 曲线不一定经过样点wkLineType3PArc =3, //3点圆弧; 3点: 起点, 中点, 终点wkLineTypeRArc =4, //半径圆弧;wkLineTypeRectArc =5, //矩形椭圆弧;wkLineType3PCircle =6, //3点圆; 圆上3点wkLineTypeRCircle =7, //半径圆;wkLineTypeRectCircle =8, //矩形椭圆;wkLineTypeBCurve =9, //B样条;wkLineTypeStrainCurve =10, //张力样条;};获取点数int GetPointCount();获取数据:walkPoint* GetOriginalPointAt(DWORD pos=0);插入点:BOOL InsertPointAt(const walkPoint& point, int pos=-1);折线化:static double GetGzZlytParameter();static void SetGzZlytParameter(double val);折线化:点的z值被设置成wkOneInsertPointMark。
void AddDiscreteToPnts(CPointArray& pnts, double scale);规则化:int Normalizing();线段线段walkSegment是线条的组成部分,对于折线,两点构成一线段;对于圆弧,三点为一线段(3点弧);对于其他线型,两点构成一线段。
walkSegment是工具类。
面面walkPolygon由一个或多个环walkParts组成,若有多个环,则第一个环为外环,其他环为内环(洞)。
岛也是多边形。
构造函数:walkPolygon(WKBPolygon *pPoly=NULL);释放面的数据:void DeleteContent();环数int GetRingsCount();获取环(指针)walkParts *GetOriginalRingAt(int nIndex);向多边形插入一个环// bHole==TRUE, 将环插在环集的0位置;FALSE--将环加到环集的尾处void InsertRing(walkParts &rRing,BOOL bHole);面积double GetArea();周长double GetPerimeter();多边形的外包盒Box GetBox();多边形的型心点Point centroid();是否为外环顺时针,内环逆时针BOOL IsClockwise();整理多边形:1、bOutRingClockwise==TRUE: 外环顺时针,内环逆时针2、将环点流首点移动到指定角nRotateCornerAt -- 1--left-top 2--top 3--right-top4--left 5--centro 6--right7--left-bottom 8--bottom 9--right-bottom若nRotateCornerAt==0,不对环旋转void Clockwise(int nRotateCornerAt,BOOL bOutRingClockwise);集合多点、多线、多面或点线面组合构成几何集合。
通过walkGeometry的At函数可遍历、添加和删除点线面基本要素。
例子构造一个体育场跑道(含洞的面):Point outerPs[]={{0,40,0},{0,140,0},{40,180,0},{80,140,0},{80,40,0},{40,0,0},{0,40,0}};Point innerPs[]={{10,40,0},{10,140,0},{40,170,0},{70,140,0},{70,40,0},{40,10,0},{10,40,0}};walkGeometry runGrd;walkParts outerRing, innerRing;outerRing.InsertPointsAt(walkPoints(wkLineTypeStraight, 2, outerPs+0), 0);outerRing.InsertPointsAt(walkPoints(wkLineType3Parc, 3, outerPs+1), 1);outerRing.InsertPointsAt(walkPoints(wkLineTypeStraight, 2, outerPs+3), 2);outerRing.InsertPointsAt(walkPoints(wkLineType3Parc, 3, outerPs+4), 3);innnerRing.InsertPointsAt(walkPoints(wkLineTypeStraight, 2, innerPs+0), 0);innnerRing.InsertPointsAt(walkPoints(wkLineType3Parc, 3, innerPs+1), 1);innnerRing.InsertPointsAt(walkPoints(wkLineTypeStraight, 2, innerPs+3), 2);innnerRing.InsertPointsAt(walkPoints(wkLineType3Parc, 3, innerPs+4), 3);由外环和内环生成面,再生成地物面:walkPolygon runPoly;runPoly.InsertRing(outerRing, FALSE);runPoly.InsertRing(innnerRing, TRUE);runGrd.InsertPolygon(runPoly);也可以采用如下方法生成地物面:runGrd.InsertPartsAt(outerRing, 0, TRUE);runGrd.InsertPartsAt(innerRing, 1, TRUE);runGrd.PutGMInOrder();使用WalkLt创建一个应用使用VC6环境创建WalkLt应用的例子(要求操作系统含GDIPLUS.DLL,如WindowsXP操作系统)。