工业机器人应用案例码垛详解
- 格式:docx
- 大小:11.33 KB
- 文档页数:4
工业机器人搬运码垛毕业设计引言工业机器人在现代制造业中扮演着重要的角色,其高效的搬运能力对于提高生产效率起着不可替代的作用。
码垛是工业机器人常见的任务之一,通过将货物从一处搬运到另一处,实现物料的堆叠和封装。
本文将探讨工业机器人搬运码垛的相关技术和其在毕业设计中的应用。
1.1 概述工业机器人搬运码垛是利用机器人系统完成货物的搬运任务。
相比传统的人工搬运,工业机器人搬运码垛具有高效、快速和精确的特点。
通过合理设置机器人的路径和动作,可以实现大规模、连续、高速的搬运作业,提高生产效率和质量。
1.2 目的本毕业设计的目的是设计并实现一套具有自主路径规划、机器人操作控制和人机交互功能的工业机器人搬运码垛系统。
通过研究和应用相关技术,提高搬运效率,减少人力成本,提高生产自动化水平。
正文2.1 自主路径规划在工业机器人搬运码垛过程中,路径规划是一个重要的环节。
通过合理的路径规划,可以保证机器人在有限的空间内有效地搬运货物。
目前,常见的路径规划方法有基于运动学的方法、基于力学的方法和基于视觉的方法等。
其中,基于视觉的路径规划方法在码垛任务中具有较好的应用效果。
通过视觉系统获取环境信息,并利用算法分析图像数据,可以实现机器人路径的自主规划。
2.2 机器人操作控制机器人操作控制是实现工业机器人搬运码垛的核心技术之一。
通过合理配置机器人的控制系统,可以实现机器人的精确搬运和操作。
对于工业机器人搬运码垛任务,通常需要考虑机器人的速度、加速度、力量和稳定性等方面的因素。
通过调整机器人的控制参数,并结合传感器的反馈信息,可以实现机器人的优化控制,提高搬运效率和质量。
结论3.1 总结工业机器人搬运码垛是一项重要的技术任务,其高效、快速和精确的搬运能力对于现代制造业的发展起着至关重要的作用。
通过合理应用自主路径规划和机器人操作控制技术,可以实现工业机器人在搬运码垛过程中的高效、稳定和准确的操作。
3.2 展望随着科技的发展和制造业的进步,工业机器人搬运码垛技术将不断完善和发展。
工业机器人应用案例码垛详解
1.食品行业:在食品行业中,大量的产品需要进行包装和码垛。
机器
人可以代替人工完成包装和码垛工作,保证产品的密封性和整齐度,并且
可以按照规定的模式进行码垛。
机器人的操作速度快,效率高,能够满足
高速生产线的需求。
2.电子行业:在电子行业中,产品的码垛要求较高,需要精确、快速
进行操作。
机器人可以根据产品的特征进行识别和摆放,保证码垛的准确
度和一致性。
此外,机器人还可以根据产品的体积和重量进行分组和码垛,提高物流效率。
3.化工行业:在化工行业中,往往需要对不同规格的包装进行码垛。
机器人可以根据产品的尺寸和重量,自动调整夹具的大小和力度,确保产
品在码垛过程中不受损坏。
此外,机器人还可以根据生产计划和优化算法,进行智能化的码垛排列,最大程度地利用空间和提高存储效率。
4.物流行业:在物流仓储中心,机器人可以根据订单信息和库存情况,自动进行码垛和仓储管理。
机器人可以通过扫描和识别系统,快速找到指
定的货物,并进行按序码垛。
机器人还可以根据产品的特点和要求,进行
贴标、分拣和封箱等工作,提高物流仓储的效率和准确度。
以上是几个典型的工业机器人应用案例,机器人在码垛中的应用可以
提高生产效率和质量,并减少人工成本和劳动强度。
随着科技的不断进步
和机器人技术的不断发展,相信机器人在码垛领域的应用会越来越广泛,
为工业生产带来更多的价值和便利。
Internal Combustion Engine & Parts•147 •ABB工业机器人码垛教学编程案例分析吴应桦(河南工程学院工程训练中心,郑州451191)摘要:工业机器人,是通过计算机编程控制来进行行动完成各种工作的自动化的设备,在当今社会的大环境趋势下,工业机器人 的应用越来越广泛,增长迅速。
当前局势下,越来越多的院校为了顺应潮流,先后开设了工业机器人的课程。
随着经济和社会的进一步 发展,我国的人口红利则会逐步的消失,在大量的劳动密集型产业中,采用工业机器人来替代人工操作,则可以持续性的保持工业的 生产效率和竞争力。
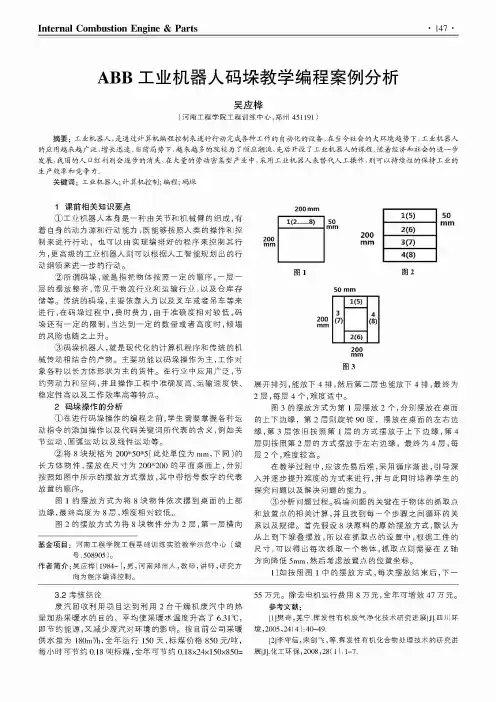
关键词:工业机器人;计算机控制;编程;码垛1课前相关知识要点①工业机器人本身是一种由关节和机械臂的组成,有着自身的动力源和行动能力,既能够按照人类的操作和控制来进行行动,也可以由实现编排好的程序来控制其行为,更高级的工业机器人则可以根据人工智能规划出的行动纲领来进一步的行动。
②所谓码垛,就是指把物体按照一定的顺序,一层一 层的摆放整齐,常见于物流行业和运输行业,以及仓库存储等。
传统的码垛,主要依靠人力以及叉车或者吊车等来进行,在码垛过程中,费时费力,由于准确度相对较低,码垛还有一定的限制,当达到一定的数量或者高度时,倾塌的风险也随之上升。
③ 码垛机器人,就是现代化的计算机程序和传统的机 械传动相结合的产物。
主要功能以码垛操作为主,工作对象各种以长方体形状为主的货件。
在行业中应用广泛,节约劳动力和空间,并且操作工程中准确度高、运输速度快、稳定性高以及工作效率高等特点。
2码垛操作的分析① 在进行码垛操作的编程之前,学生需要掌握各种运 动指令的添加操作以及代码关键词所代表的含义,例如关节运动、圆弧运动以及线性运动等。
②将8块规格为200*50*5(此处单位为mm,下同)的长方体物件,摆放在尺寸为200*200的平面桌面上,分别按照如图中所示的摆放方式摆放,其中带括号数字的代表放置的顺序。
FANUC机器人是世界上领先的工业机器人制造商之一,其产品广泛应用于汽车制造、电子设备组装、金属加工等领域。
在各种生产线中,FANUC机器人常常被用于码垛操作,将成品或半成品整齐堆放在指定位置。
码垛编程是FANUC机器人应用中的重要部分,本文将介绍基于FANUC机器人的码垛编程实例。
1. 了解码垛编程的基本原理在进行FANUC机器人码垛编程之前,首先需要了解码垛编程的基本原理。
码垛编程是指根据产品尺寸、叠放方式以及堆放位置等要求,编写机器人的运动路径和动作指令,使机器人能够准确地将产品码垛到指定位置。
在编程过程中,需要考虑到产品的尺寸、重量、堆叠方式、堆叠层数等因素,并结合机器人的动作能力和工作空间进行合理规划。
2. 准备码垛编程所需的工具和材料在进行FANUC机器人码垛编程之前,需要准备相应的工具和材料。
首先需要一台FANUC机器人以及其配套的控制系统和编程软件。
还需要准备相关的产品尺寸和堆叠方式等参数信息,以便在编程过程中进行参考和设置。
3. 进行码垛编程的基本步骤进行FANUC机器人码垛编程的基本步骤如下:3.1 确定产品堆叠方式和堆叠位置首先需要根据产品的堆叠方式(如垂直叠放、交错叠放等)和堆叠位置(如评台、货架等)确定机器人需要进行的工作任务。
在确定堆叠方式和位置之后,可以根据实际情况设置机器人的工作空间和运动路径。
3.2 设置机器人的工作空间和运动路径根据产品的尺寸、重量和堆叠方式等要求,设置机器人的工作空间和运动路径。
在设置过程中,需要考虑到机器人的动作范围和姿态能力,确保机器人能够准确地进行码垛操作。
3.3 编写机器人的动作指令根据产品的堆叠方式和位置等要求,编写机器人的动作指令。
在编写过程中,需要考虑到产品的尺寸、重量和堆垛层数等因素,并根据机器人的动作能力和工作空间进行合理规划。
3.4 调试和优化机器人的运动路径和动作指令在编写完机器人的动作指令之后,需要对其进行调试和优化。
安川机器人码垛编程实例解释
安川机器人是一种工业机器人,用于自动化生产线上的各种操作,包括码垛(将货物堆叠成一定的形状)。
编程实例通常指的是
针对特定任务的编程示例,用于演示如何使用安川机器人进行码垛
操作。
在一个编程实例中,通常会包括以下内容:
1. 任务描述,说明需要完成的具体码垛任务,包括货物的种类、尺寸、堆叠方式等。
2. 机器人动作规划,描述安川机器人在执行码垛任务时需要进
行的具体动作,包括移动、抓取货物、放置货物等。
3. 编程代码,展示如何使用安川机器人的编程语言(通常是类
似于 C++ 或 Python 的语言)来实现上述动作规划,包括控制机器
人的运动、抓取和放置货物等操作。
4. 演示结果,展示编程实例的运行结果,通常是一个视频或者
模拟演示,以便理解安川机器人如何完成码垛任务。
通过这样的编程实例,工程师和操作人员可以学习如何利用安川机器人进行码垛操作,并且可以根据具体任务进行修改和定制,从而实现自动化生产线上的货物堆垛操作。
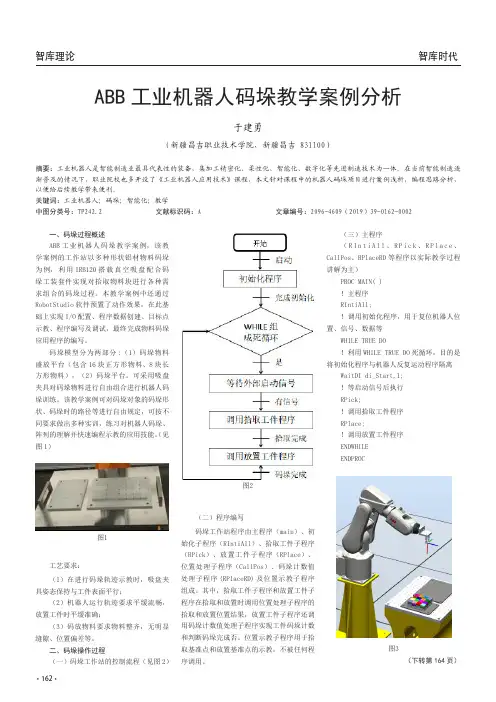
·162·一、码垛过程概述ABB 工业机器人码垛教学案例,该教学案例的工作站以多种形状铝材物料码垛为例,利用IRB120搭载真空吸盘配合码垛工装套件实现对拾取物料块进行各种需求组合的码垛过程。
本教学案例中还通过RobotStudio 软件预置了动作效果,在此基础上实现I/O 配置、程序数据创建、目标点示教、程序编写及调试,最终完成物料码垛应用程序的编写。
码垛模型分为两部分:(1)码垛物料盛放平台(包含16块正方形物料、8块长方形物料),(2)码垛平台。
可采用吸盘夹具对码垛物料进行自由组合进行机器人码垛训练。
该教学案例可对码垛对象的码垛形状、码垛时的路径等进行自由规定,可按不同要求做出多种实训,练习对机器人码垛、阵列的理解并快速编程示教的应用技能。
(见图1)图1工艺要求:(1)在进行码垛轨迹示教时,吸盘夹具姿态保持与工件表面平行;(2)机器人运行轨迹要求平缓流畅,放置工件时平缓准确;(3)码放物料要求物料整齐,无明显缝隙、位置偏差等。
二、码垛操作过程(一)码垛工作站的控制流程(见图2)图2(二)程序编写码垛工作站程序由主程序(main)、初始化子程序(RIntiAll)、拾取工件子程序(RPick)、放置工件子程序(RPlace)、位置处理子程序(CallPos)、码垛计数值处理子程序(RPlaceRD)及位置示教子程序组成。
其中,拾取工件子程序和放置工件子程序在拾取和放置时调用位置处理子程序的拾取和放置位置结果,放置工件子程序还调用码垛计数值处理子程序实现工件码垛计数和判断码垛完成否。
位置示教子程序用于拾取基准点和放置基准点的示教,不被任何程序调用。
(三)主程序(R I n t i A l l 、R P i c k 、R P l a c e 、CallPos、RPlaceRD 等程序以实际教学过程讲解为主)PROC MAIN( )!主程序RIntiAll;!调用初始化程序,用于复位机器人位置、信号、数据等WHILE TRUE DO!利用WHILE TRUE DO 死循环,目的是将初始化程序与机器人反复运动程序隔离WaitDI di_Start,1;!等启动信号后执行RPick;!调用拾取工件程序RPlace;!调用放置工件程序ENDWHILEENDPROC图3(下转第164页)ABB 工业机器人码垛教学案例分析于建勇(新疆昌吉职业技术学院,新疆昌吉 831100)摘要:工业机器人是智能制造业最具代表性的装备,集加工精密化、柔性化、智能化、数字化等先进制造技术为一体。
工业机器人典型应用案例精析码垛一、引言随着制造业的快速发展和自动化水平的提高,工业机器人已经成为制造业中不可或缺的重要装备。
而在工业机器人应用领域中,码垛是其中一个典型应用案例。
本文将从码垛的定义、码垛机器人的分类、码垛机器人的特点和码垛典型应用案例四个方面进行详细介绍。
二、码垛的定义码垛是指在生产过程中,将相同规格、相同品种或相似品种的产品按照一定规律堆放起来,形成一个整齐美观、易于管理和运输的物流单元。
通俗来说就是把货物按照一定规则摆放整齐。
三、码垛机器人的分类根据其工作原理和结构特点,可以将码垛机器人分为以下几类:1. 传统式堆叠式机器人:这种机器人主要由基座、臂架和手臂组成。
它们通常用于托盘堆叠和箱子堆叠等任务。
2. 滑动式堆叠式机器人:这种机器人通过滑动手臂来完成堆叠任务,具有较高的速度和精度。
3. 矩阵式堆叠式机器人:这种机器人利用多个手臂来完成堆叠任务,可以同时处理多个产品,具有较高的效率和生产能力。
4. 三维视觉堆叠式机器人:这种机器人通过三维视觉系统来完成堆叠任务,可以实现更高的准确性和稳定性。
四、码垛机器人的特点1. 高效性:码垛机器人可以在较短的时间内完成大量产品的堆叠任务,提高了生产效率。
2. 精确性:码垛机器人可以在不同位置、角度和高度上准确地堆放产品,保证了产品质量和稳定性。
3. 灵活性:码垛机器人可以根据不同的生产需求进行编程调整,适应不同规格、品种或数量的产品堆放要求。
4. 安全性:码垛机器人可以避免工作中出现危险情况和意外事故,保证了生产场所的安全环境。
五、码垛典型应用案例1. 食品行业中的码垛应用案例食品行业是一个需要大量进行物流运输和仓储管理的行业,码垛机器人在其中的应用得到了广泛推广。
以糖果生产为例,传统的糖果生产需要大量手工堆叠,效率低下且易出错。
而利用码垛机器人进行自动化堆叠,则可以大幅提高生产效率和产品质量。
同时,采用码垛机器人还可以避免人工操作中出现的卫生问题。

fanuc机器人码垛编程实例
(最新版)
目录
1.FANUC 机器人码垛编程概述
2.码垛编程的实例分析
3.码垛编程的优点与应用范围
正文
一、FANUC 机器人码垛编程概述
FANUC 机器人作为全球知名的工业机器人品牌,其码垛编程是机器人在搬运过程中实现自动化的重要手段。
码垛编程是针对机器人搬运货物时需要堆叠摆放的一种编程方式,通过合理设置码垛的形状、大小和摆放顺序,从而实现货物的高效搬运。
二、码垛编程的实例分析
假设有一个场景,需要用 FANUC 机器人将不同尺寸的货物进行码垛摆放。
首先,需要确定码垛的形状,例如,可以将货物摆放成 3x3 的正方形码垛。
接下来,通过编程设定机器人的运动轨迹和顺序,以完成码垛的搭建。
具体编程步骤如下:
1.设定机器人的初始位置和姿态;
2.设定机器人的运动轨迹,以完成货物的抓取;
3.设定机器人将货物摆放到码垛上的位置和姿态;
4.循环重复以上步骤,直至码垛搭建完成。
三、码垛编程的优点与应用范围
码垛编程具有以下优点:
1.提高搬运效率:通过合理设置码垛的形状和大小,可以减少机器人在搬运过程中的运动时间,从而提高整体效率。
2.节省空间:码垛摆放方式可以有效利用仓库空间,减少货物摆放所需的面积。
3.便于管理:码垛编程使得货物摆放更加规范,便于仓库管理和查找。
码垛编程在以下场景中有广泛应用:
1.仓库货物搬运;
2.生产线上的物料配送;
3.物流中心的货物分拣等。
工业机器人码垛功能的设计与实现随着制造业的快速发展,工业机器人在现代生产中的应用越来越普遍,成为工业自动化的重要组成部分。
在生产线上,机器人码垛是机器人应用的常见场景之一,它可以实现对产品进行快速而准确的分拣、码垛等操作,提高了生产效率和质量。
本文将介绍工业机器人码垛功能的设计和实现。
一、机器人码垛的基本原理机器人码垛主要是指将相同或不同的产品按照一定规则堆叠在一起,形成一个整齐的堆叠结构。
其基本原理包括三个方面:识别、规划和执行。
机器人需要通过视觉或其他感知设备识别待处理的产品,确定其位置、数量和状态等信息。
其次,机器人需要进行路径规划,确定码垛位置和顺序,保证堆叠的稳定性和均衡性。
最后,机器人通过执行器实现对产品的抓取、移动和放置等操作,完成码垛任务。
二、机器人码垛的设计要点机器人码垛的设计要点包括:操作空间、抓取方式、码垛规则、控制系统等。
操作空间是指机器人进行码垛操作的工作区域,其大小和形状应根据生产线的实际情况进行设计,以确保机器人操作的灵活性和安全性。
抓取方式是指机器人进行产品抓取的方式,常见的抓取方式包括机械手爪、吸盘和磁力等。
码垛规则是指产品堆叠的方式和顺序,应根据产品的形状、重量和稳定性等因素进行规划。
控制系统是机器人进行码垛操作的关键,包括机器人控制器、传感器和执行器等,应保证系统的稳定性和可靠性。
三、机器人码垛的实现方法机器人码垛的实现方法包括基于模板的码垛和基于视觉的码垛两种方式。
基于模板的码垛是指通过预设的模板来确定产品的码垛位置和顺序,机器人根据模板进行操作。
这种方式实现简单,但对产品的形状和大小有一定的限制。
基于视觉的码垛是指通过视觉识别技术来确定产品的位置和状态,机器人根据识别结果进行操作。
这种方式可以适应各种形状和大小的产品,但需要较高的计算能力和算法支持。
四、机器人码垛的应用场景机器人码垛广泛应用于各种生产行业,如食品加工、医药制造、物流配送等领域。
在食品加工行业中,机器人码垛可以实现对不同形状的食品快速进行分拣和码垛,提高生产效率和卫生标准;在医药制造领域,机器人码垛可以提高生产效率和生产质量,减少人为误差;在物流配送领域,机器人码垛可以实现对货物的快速分拣和码垛,提高物流效率和准确性。
ABB机器人码垛案例分析
案例:机器人从传送带P10处使用吸盘工具取料进行码垛,物料到位传感器的信号为数字输入信号变为1,码垛堆如图所示,物料为边长50mm的立方体,吸盘工作信号为数字输出DO1置为1.作为安全位HOME,请利用偏移、循环,赋值等功能编写工作程序。
思路解析:
Main()
Reset do1. 复位
机器人回到HOME点
nx := 0
While nx < 2, do
Ny :=0
While Ny < 6 do
机器人移动P10上方(偏移值100)
等待DI1 信号
机器人移动P10,
抓取吸气(设置do1)
等待时间0.5秒
机器人机器人移动P10上方(偏移值100)
机器人机器人移动P20上方(偏移值100)
机器人机器人移动P20
放下物料(重置do1)
等待时间0.5秒
机器人机器人移动P20上方(偏移值100)
Movel offs(p20 ,nx*50,Ny*50 , 0 )
增量函数
Ny = Ny + 1
End whlie
nx = nx+1。
FANUC 工业机器人码垛编程详解!1. 码垛功能的定义对几个具有代表性的点进行示教,即可以从下层到上层按照顺序堆叠工件。
2. 码垛的种类码垛B:包括码垛B(单路径模式)和码垛BX(多路径模式)适用于工件姿势恒定,堆叠时的底面形状为直线或四角形。
码垛E:包括码垛E(单路径模式)和码垛EX(多路径模式)适用于复杂的堆叠模式(工件姿势改变,堆叠时的底面形状不是四角形)。
3. 码垛指令(1)码垛指令格式:码垛指令基于码垛寄存器的值,根据堆叠模式计算当前的堆叠点位置,并根据路径模式计算当前的路径,改写码垛动作指令的位置数据。
(2)码垛动作指令:以使用具有趋近点、堆叠点、回退点的路径点作为位置数据的动作指令,是码垛专用的动作指令。
该位置数据通过码垛指令每次都被改写。
(3)码垛结束指令:计算下一个堆叠点,改写码垛寄存器的值。
(4)码垛寄存器:用于码垛的控制。
进行堆叠点的指定、比较、分支等。
4. 码垛示教(1)选择码垛程序(2)输入堆栈初始数据(3)示教堆上样式(4)示教路径模式5. 码垛作业课题演示如图4-1、4-2 所示动作循环,在输送带P3 出进行工件抓取,在托盘上进行码垛。
用示教器编写程序,程序如下:1:J PR[1] 100% FINE ;移动至待命位置P1 2:LBL[1] ;标签13:J PR[2] 100% FINE ;移动至待命位置P2 4:WAIT RI[12]=ON ;等待抓料位有料5:L PR[3] 100mm/sec FINE ;移动至抓料位P3 6:WAIT 1.00(sec) ;等待1S7:RO[11]=ON ;抓手闭合阀ON8:WAIT RI[11]=ON ;等待抓手闭合开关ON 9:RO[11]=OFF ;抓手闭合阀OFF10:PALLETIZING-B_111:J PAL_1[A_1] 80% FINE ;移动至趋近点12:L PAL_1[BTM] 100mm/sec FINE ;移动至堆叠点13:RO[10]=ON ;抓手张开阀ON14:WAIT RI[10]=ON ;等待抓手张开开关ON 15:RO[10]=OFF ;抓手张开阀OFF16:L PAL_1[R_1] 100mm/sec FINE ;移动至回退点17:PALLETIZING-END_118:JUMP LBL[1] ;跳转至标签16. 注意事项(1)要提高码垛的动作精度,需要正确进行TCP 的设定。
工业机器人应用案例码垛详解
随着科技的进步以及现代化进程的加快,人们对搬运速度的要求越来越高,传统的人工码垛只能应用在物料轻便、尺寸和形状变化大、吞吐量小的场合,这已经远远不能满足工业的需求,机器人码垛机应运而生。
机器人码垛机是工作人员的手足与大脑功能延伸和扩展,它可以代替人们在危险、有毒、低温、高热等恶劣环境中工作;帮助人们完成繁重、单调、重复的劳动,提高劳动生产率,保证产品质量。
一、码垛工业机器人应用优势
1.码垛机器人的码垛能力比传统码垛机,人工码垛都要高的多;
2.结构非常简单,故障率低,易于保养及维修;
3.主要构成零配件少,维持费用很低;
4.电源消耗低,电源消耗量大约机械式码垛机的五分之一。
5.码垛机械手臂可以设置在狭窄的空间,场地使用效率高,应用灵活。
6.全部操作可在控制柜屏幕上手触式完成,操作非常简单。
7.码垛机械手臂的应用非常灵活,一台机器手臂可以同时处理最多6 条生
产线的不同产品。
产品更新时,只须输入新数据,重新计算后即可进行运行,无须硬件、设备上的改造与设置。
8. 垛型及码垛层数可任意设置,垛型整齐,方便储存及运输。
简言之:工作能力强、适用范围大、占地空间小、灵活性高、成本低以及维护方便等多个方面的优势使其应用渐为广泛,并成为一种发展趋势。