SD-2H4A128型两相步进电机驱动器使用手册
- 格式:pdf
- 大小:665.16 KB
- 文档页数:8
Q2HB44MC二相混合式步进电机驱动器使用说明1.引言:2.驱动器连接:将电机的四个电源线(两个相位)连接到驱动器的输出端子上。
请注意线缆的正确极性连接,以免损坏驱动器或电机。
另外,在连接线缆之前,请确保驱动器和电机的电源已关闭。
3.电源设置:驱动器需要一个外部电源供电。
请根据电机的额定电压选择合适的电源,并将其连接到驱动器的电源输入端子上。
在接通电源之前,先检查一下电源的稳定性和电压是否匹配。
4.步进模式设置:Q2HB44MC(D)驱动器支持全步进和微步进模式。
通过设置驱动器的配置开关,可以选择不同的步进模式。
全步进模式适合一些不需要太高精度控制的应用,而微步进模式则可以提供更高的分辨率和平滑度。
请根据具体需求选择合适的步进模式。
5.步进角度和细分设置:步进电机的角度取决于其旋转电磁铁极对数和步进模式。
通过设置驱动器的细分开关,可以将一次步进划分为更小的步进角度,从而提供更高的精度。
请根据实际需求选择合适的细分设置。
6.保护和故障检测:Q2HB44MC(D)驱动器具有过流和过热保护功能。
当电机过流或过热时,驱动器会自动关闭输出信号,以保护驱动器和电机。
此外,驱动器还支持故障检测功能,可以检测到电机的缺相、断线等故障情况。
如果发生故障,请及时处理并排除故障。
7.反向运动控制:8.外部信号输入和输出:驱动器具有多个外部信号输入和输出端口,可以与控制器或其他外部设备进行通信。
通过这些外部信号,可以实现各种控制功能,如启动/停止信号、速度控制信号等。
请参考驱动器的技术手册,了解每个信号端口的具体功能和使用方法。
总结:Q2HB44MC(D)二相混合式步进电机驱动器是一款功能强大的驱动器,适用于各种步进电机控制应用。
通过合理设置驱动器的参数和模式,可以实现高精度的步进电机运动控制。
请仔细阅读驱动器的技术手册,并根据具体需求进行相应的设置和调整,以获得最佳的控制效果。
两相步进电机驱动器产品手册1.产品介绍:1.1 产品概述:本章节介绍该两相步进电机驱动器产品的概览信息,包括产品的主要特点和应用领域。
1.2 产品规格:本章节详细介绍该步进电机驱动器的技术规格,包括输入电压、输出电流、步进角度等参数。
1.3 产品外观及接口:本章节描述该产品的外观特征以及接口定义,包括连接器类型、接口定义等。
2.安装与配置:2.1 安装步骤:本章节详细介绍该步进电机驱动器的安装步骤,包括硬件安装、接线和电源接入等。
2.2 配置参数:本章节介绍如何进行步进电机驱动器的参数配置,包括步数设置、步进角度调整等。
3.使用指南:3.1 驱动方式:本章节介绍两种常见的驱动方式,分别是全步进驱动和微步进驱动。
3.2 控制信号:本章节详细介绍控制信号的定义和使用方法,包括脉冲信号、方向信号等。
3.3 控制软件:本章节介绍常用的控制软件及其使用方法,包括设置步数、调整速度等。
3.4 常见问题解答:本章节了一些常见问题,并提供了相应的解决方案。
4.维护与保养:4.1 维护周期:本章节介绍了定期维护步进电机驱动器的时间周期,包括清洁、检查连接器等。
4.2 故障排除:本章节介绍了一些常见的故障现象并提供了相应的排除方法。
5.附件:本文档附带以下附件:●产品外观图●连接示意图●控制信号接口定义表6.法律名词及注释:在本文档中涉及的法律名词及其相关注释:●步进电机:一种电动机,它通过每次给定一个固定的角度脉冲就能转动一定角度的电动机。
●电流:通过导体中的电子流动而产生的一种物理现象。
●步进角度:步进电机每次转动的角度,通常为固定值(如1.8度)或可调节的微步角度。
1.1产品简介交流伺服技术自八十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷包装机械、纺织机械、自动化生产线等自动化领域。
SDXXX系列交流伺服是本公司自主研发的新一代交流伺服驱动器,主要采用最新的IRMCK201作为核心运算单元,并采用了复杂可编程器件EPLD及三菱智能功率模块,具有集成度高,体积小,响应速度快,保护完善,可靠性高等一系列优点。
适用于高精度的数控机床、自动化生产线、机械制造业等工业控制自动化领域。
与以往驱动系统相比,SDXXX交流伺服系统具有以下优点:★伺服电机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
★调速比为1:5000,从低速到高速都具有稳定的转矩特性。
★伺服电机最高转速可达5000rpm,回转定位精度1/10000r(注:不同型号电机最高转速不同)。
★通过修改参数可对伺服系统的工作方式、运行特性作出适当的设置,以适应不同的要求。
★改进的空间矢量控制算法,比普通的SPWM产生的力矩更大,噪音更小。
★高达3 倍的过载能力,带负载能力强。
★完善的保护功能:过流,过压,欠压和编码器故障等保护。
★监视功能允许显示18个参数状态,包括位置误差,电机转速、反馈脉冲、指令脉冲、电机电流、报警记录等。
★高适应性,能够适应高速高精度电机,可以配套2~8磁极,400-6000线编码器的各型号电机。
1.2型号意义1.伺服驱动器型号S D30 MT功能代码(M:数字量与模拟量兼容)IPM模块的额定电流(15/20/30/50/75A)(SVPWM)的交流伺服驱动器【注意】☆产品的储存和安装必须满足环境条件要求。
☆产品的安装需要防火材料,不得安装在易燃物上面或附近,防止火灾。
☆伺服驱动器须安装在电气控制柜内,防止尘埃、腐蚀性气体、导电物体、液体及易燃物侵入。
☆伺服驱动器和伺服电机应避免振动,禁止承受冲击。
☆严禁拖拽伺服电机电线、电机轴和编码器。
两相步进电机驱动器安全操作及保养规程1. 引言两相步进电机驱动器是一种常用的控制器,用于控制步进电机的转动和速度。
由于其具有较高的功率和高速转动的特点,因此在操作和维护过程中需要遵循一定的安全操作和保养规程,以确保人员和设备的安全。
本文将介绍两相步进电机驱动器的安全操作和保养规程,包括安全操作措施、日常保养和定期检查等方面的内容。
2. 安全操作措施为了确保工作场所的安全和人员的安全,以下是使用两相步进电机驱动器时需要遵循的安全操作措施:2.1 穿戴个人防护设备在操作步进电机驱动器之前,必须穿戴个人防护设备,包括安全帽、安全眼镜、防护手套和防滑鞋等。
这些设备可以有效地保护人员免受可能发生的意外伤害。
2.2 确保工作场所的清洁和整齐在操作步进电机驱动器时,工作场所必须保持清洁和整齐。
清理工作场所可以减少杂物堆积和绊倒的风险。
此外,必须确保有足够的照明,并清除任何可能导致滑倒的液体或物品。
2.3 避免电击风险在操作步进电机驱动器之前,务必确保断开电源。
在进行任何维修或调整时,必须将电源拔出,并采取适当的措施确保安全。
2.4 遵循正确的操作步骤操作步进电机驱动器时,必须遵循正确的操作步骤。
不要进行不必要的操作,并始终参考相关操作手册或指南。
如果您对操作步骤不确定,请寻求专业人员的帮助。
2.5 注意机器运转在操作步进电机驱动器时,必须始终注意机器的运转情况。
如果发现任何异常或故障,应立即停止使用并通知相关维修人员。
3. 日常保养为了确保两相步进电机驱动器的正常运行和延长其寿命,以下是一些日常保养措施:3.1 清洁驱动器表面定期清洁驱动器的表面可以防止灰尘和污垢的积累。
使用干净的布或软刷清洁驱动器表面,并避免使用带有酸性或腐蚀性物质的清洁剂。
3.2 定期检查连接器和电缆定期检查连接器和电缆的状态,确保其紧固并无损坏。
如果发现松动或损坏,应及时修复或更换。
3.3 保持通风良好两相步进电机驱动器应放置在通风良好的位置。
步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
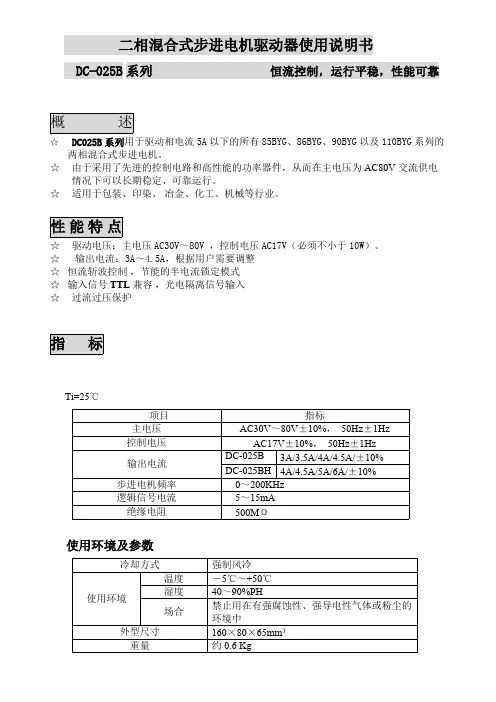
二相混合式步进电机驱动器使用说明书DC-025B 系列 恒流控制,运行平稳,性能可靠☆ DC025B 系列用于驱动相电流5A 以下的所有85BYG 、86BYG 、90BYG 以及110BYG 系列的两相混合式步进电机。
☆由于采用了先进的控制电路和高性能的功率器件,从而在主电压为AC80V 交流供电情况下可以长期稳定、可靠运行。
☆适用于包装、印染、 冶金、化工、机械等行业。
☆驱动电压:主电压AC30V ~80V ,控制电压AC17V (必须不小于10W )。
☆ 输出电流:3A ~4.5A ,根据用户需要调整 ☆ 恒流斩波控制 ,节能的半电流锁定模式 ☆ 输入信号TTL 兼容 ,光电隔离信号输入 ☆过流过压保护Ti=25℃项目指标主电压AC30V ~80V ±10%, 50Hz ±1Hz 控制电压AC17V ±10%, 50Hz ±1Hz DC-025B 3A/3.5A/4A/4.5A/±10%输出电流DC-025BH 4A/4.5A/5A/6A/±10%步进电机频率 0~200KHz 逻辑信号电流 5~15mA 绝缘电阻500M Ω使用环境及参数冷却方式强制风冷温度-5℃~+50℃湿度40~90%PH使用环境场合禁止用在有强腐蚀性、强导电性气体或粉尘的环境中外型尺寸160×80×65mm 3重量约 0.6 KgP 1危念,牢固展稳定实践中五个必须”等重要律和政治规矩,带头牢责任。
三、主要措施 支部为单位开展一次主、谈,对照入党誓词找标准温入愿和入党誓词,交流思想组中心组形期组织集中学习,每次组每月底组织一员集中学习。
支部每季度政治方向”、“坚持宗旨,敢于担当作为”、个专题集中学习讨论不于1天。
(三)开展“讲党课”要求,开展班子成员到联系区县X X 局部党员讲党课,邀请党师、专家学者给党员干规、学系列 讲话,做党员”学习教育实施方列讲话,做合格党员习教育(以下简称“两开展“学党章党规、列讲话,做合格党于印发〈关于在全市中开展“学党办〔2016〕28号),局实际,一做”学习教育,基话,全面贯彻落实党大和“三严三实”专题结合、创先争优,进改,进一步坚持问头、以上率下,局和“决胜明可由用户自己随意选择。
步进电机驱动器的使用说明
二、步进电机驱动器的使用说明
本驱动器为M415B细分驱动器,适合驱动中小型的任何1。
5A相电流以下的两相或四相混合式步进电机.PUL为脉冲信号,通过控制脉冲的频率来控制步进电机的运行速度,DIR为方向控制。
通过细分设定来确定步进电机旋转一圈的脉冲数.
1.引脚信号定义
2.引脚信号功能的详解
3。
电气特性
4。
细分和电流设定
细分设定
改变驱动器的细分倍数,可改变电机旋转一圈所需的脉冲数
电流设定
对于同一电机,电流设定值越大时,电机的输出力矩越大,但电流大的同时电机和驱动器的发热也比较严重,所以一般情况是把电流设成供电机长期工作时出现温热但不过热的数值。
注意:电流设定后请运转电机15~30分钟,如电机温升太高,应降低电流设定值。
附:详情请参照M415B。
pdf。
驱动器使用方法步骤1.使用步驟①通过拨码开关设置细分数、电动机相电流、脉冲方式等。
在脉冲允许情况下,尽量用大的细分数:相电流设定为和电动机额定相电流相等的值,如果能拖动负载,可设定为小于电动机额定相电流的值。
②连接信号输入线、电动机线、电源线,确定连接紧固后上电,观察指示灯和电动机运行情况。
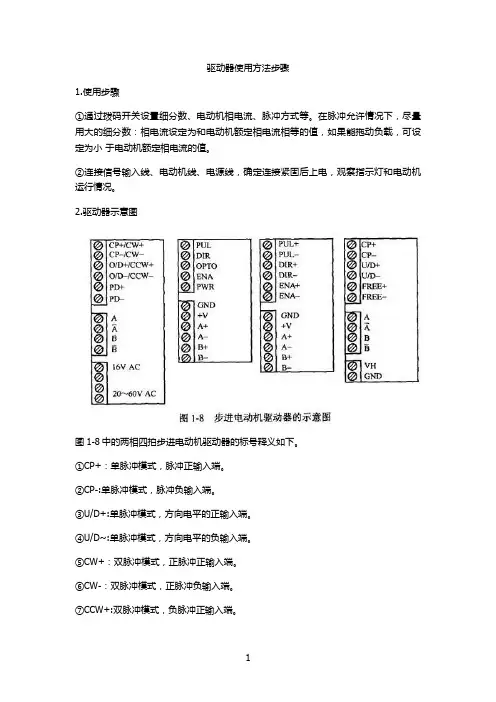
2.驱动器示意图图1-8中的两相四拍步进电动机驱动器的标号释义如下。
①CP+:单脉冲模式,脉冲正输入端。
②CP-:单脉冲模式,脉冲负输入端。
③U/D+:单脉冲模式,方向电平的正输入端。
④U/D~:单脉冲模式,方向电平的负输入端。
⑤CW+:双脉冲模式,正脉冲正输入端。
⑥CW-:双脉冲模式,正脉冲负输入端。
⑦CCW+:双脉冲模式,负脉冲正输入端。
⑧CCW-:双脉冲模式,负脉冲负输入端。
⑨PD+:脱机信号正输入端。
⑩PD-:脱机信号负输入端。
⑪FREE+:电动机脱机控制正端。
⑫FREE-.电动机脱机控制负端。
DIR:方向电平。
⑭OPTO:公共阳端,一般接直流+5V电压。
⑮ENA:电动机使能端,一般可以不接线。
⑯PWR:电源信号灯,灯亮则为正常工作。
⑰GND:公共地,连接直流电源负。
⑱V+/VH:电动机工作电压,连接直流电源正。
⑲A+、A-:与电动机A相正负分别相连。
B+、B-:与电动机B相正负分别相连。
3、电动机与驱动器的接线图,如1-9所示:4.输入信号及内部接口电路如图1-10所示,驱动器内部的脉冲信号、方向信号以及使能信号内部接口电路均采用光耦器件对输入信号进行隔离。
5.脉冲输入信号脉宽和电平方式.脉冲输入信号是最为重要的一路,驱动器每接受一个脉冲信号,就驱动步进电动机旋转一步距角,此信号频率和步进电动机的转速成正比,脉冲个数决定了步进电动机旋转的角度,控制系统通过脉冲信号CP就可以达到电动机调速和定位的目的。
正脉冲方式输入的脉冲宽度一般要求不小于2µs,如图1-11所示。
电平方式是设计控制系统时必须考虑的,对共阳接法的驱动器要求为负脉冲方式:脉冲状态为低电平,无脉冲时为高电平。
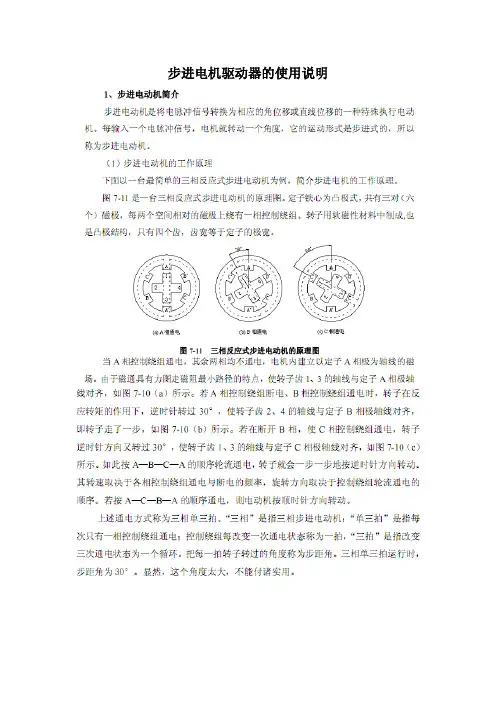
步进电机原理及使用说明(2)2008年06月29日星期日下午 12:40三、驱动控制系统组成使用、控制步进电机必须由环形脉冲,功率放大等组成的控制系统,其方框图如下:1、脉冲信号的产生。
脉冲信号一般由单片机或CPU产生,一般脉冲信号的占空比为0.3-0.4左右,电机转速越高,占空比则越大。
2、信号分配我厂生产的感应子式步进电机以二、四相电机为主,二相电机工作方式有二相四拍和二相八拍二种,具体分配如下:二相四拍为,步距角为1.8度;二相八拍为,步距角为0.9度。
四相电机工作方式也有二种,四相四拍为AB-BC-CD-DA-AB,步距角为1.8度;四相八拍为AB-B-BC-C-CD-D-AB,(步距角为0.9度)。
3、功率放大功率放大是驱动系统最为重要的部分。
步进电机在一定转速下的转矩取决于它的动态平均电流而非静态电流(而样本上的电流均为静态电流)。
平均电流越大电机力矩越大,要达到平均电流大这就需要驱动系统尽量克服电机的反电势。
因而不同的场合采取不同的的驱动方式,到目前为止,驱动方式一般有以下几种:恒压、恒压串电阻、高低压驱动、恒流、细分数等。
为尽量提高电机的动态性能,将信号分配、功率放大组成步进电机的驱动电源。
我厂生产的SH系列二相恒流斩波驱动电源与单片机及电机接线图如下:说明:CP 接CPU脉冲信号(负信号,低电平有效)OPTO 接CPU+5VFREE 脱机,与CPU地线相接,驱动电源不工作DIR 方向控制,与CPU地线相接,电机反转VCC 直流电源正端GND 直流电源负端A 接电机引出线红线接电机引出线绿线B 接电机引出线黄线接电机引出线蓝线步进电机一经定型,其性能取决于电机的驱动电源。
步进电机转速越高,力距越大则要求电机的电流越大,驱动电源的电压越高。
电压对力矩影响如下:4、细分驱动器在步进电机步距角不能满足使用的条件下,可采用细分驱动器来驱动步进电机,细分驱动器的原理是通过改变相邻(A,B)电流的大小,以改变合成磁场的夹角来控制步进电机运转的。
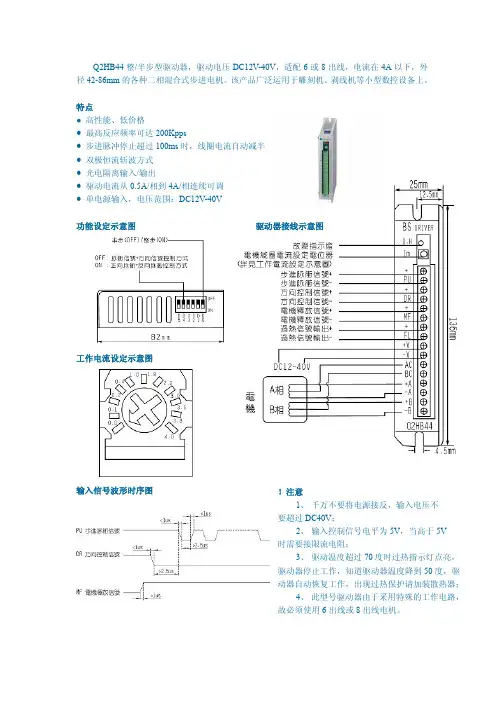
ZHH-MC两相混合式步进电机驱动器使用说明书一、概述ZHH-MC细分型两相混合式步进电机驱动器,采用直流18~50V供电,适合驱动电压24V~50V,电流小于4.2A外径42~86毫米的两相混合式步进电机。
此驱动器采用交流伺服驱动器的电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。
高速时力矩也大大高于其它二相驱动器,定位精度高。
广泛适用于雕刻机、数控机床、包装机械等分辩率要求较高的设备上。
主要特点1平均电流控制,两相正弦电流驱动输出2直流24~50V供电3光电隔离信号输入/输出4有过压、欠压、过流、相间短路保护功能5十六档细分和自动半流功能6八档输出相电流设置7具有脱机命令输人端子8电机的扭矩与它的转速有关,而与电机每转的步数无关9高启动转速10高速力矩大一、电气参数输入电压直流24~50V输入输入电流小于4安培输出电流 1.0A~4.2A功耗功耗:80W;内部保险:6A温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量200克注:拨码开关请在未上电时调好,严禁带电操作,切记!二、控制信号接口图1是驱动器的接线原理图1、控制信号定义PLS+:步进脉冲信号输入正端或正向步进脉冲信号输入正端PLS-:步进脉冲信号输入负端或正向步进脉冲信号输入负端DIR+:步进方向信号输入正端或反向步进脉冲信号输入正端DIR-:步进方向信号输入负端或反向步进脉冲信号输入负端ENA+:脱机使能复位信号输入正端ENA-:脱机使能复位信号输入负端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2、控制信号连接上位机的控制信号可以高电平有效,也可以低电平有效。
当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端。
现在以集电极开路和PNP输出为例,接口电路示意图如下:图2.输入接口电路(共阴极接法)控制器PNP输出注意:VCC值为5V时,R短接;VCC值为12V时,R为1K,大于1/8W电阻;VCC值为24V时,R为2K,大于1/8W电阻;R必须接在控制器信号端。
Driver●□3 UDK2109A , UDK2112A , UDK2120A Mass: 0.47 kg (1 lb.)B087●Mounting Bracket A (2 pieces, included)●Mounting Bracket B (2 pieces, included)Connection and Operation■Names and Functions of Driver Parts●□1□4□2□3Motor TerminalsPower Input TerminalsDescription of input/output signals ➜ Page C-130IntroductionAS ASC5-Phase Microstep RK 2-Phase Full/Half UMK 5-Phase Microstep CRK 2-Phase Microstep RBK 2-Phase Microstep CMK 2-Phase PK/PV 2-Phase PK EMP400SG8030JAccessories InstallationAC Input DC InputAC InputDC InputWithout Encoder With EncoderControllersConnection Diagram●DriverGround (Use wire of AWG18 or thicker.)ControllerInput Signal Connection◇Signals can be connected directly when 5 VDC is supplied. If the signals are used at a voltage exceeding 5 VDC, be sure to provide an external resistor to prevent the current exceeding 20 mA from flowing. Internal components will be damaged if a voltage exceeding 5 VDC is supplied directly without using an external resistor.Example: If the voltage is 24 VDC, connect a resistor (R 1) of 1.5 to 2.2 k Ω and 0.5 W or more.Output Signal Connection◇Use output signals at 24 VDC or less and 10 mA or less.If these specifications are exceeded, the internal components may be damaged.Check the specification of the connected equipment.When the current is above 10 mA, connect an external resistor R 2.Power Supply◇Use a power supply that can supply sufficient input current. When power supply capacity is insufficient, a decrease in motor output can cause the following malfunctions:Motor does not operate properly at high-speed. ●Slow motor startup and stopping●Notes on Wiring◇Use twisted-pair wires of AWG24 or thicker and keep wiring as short as possible [within 2 m ●(6.6 ft.)].Note that as the length of the pulse signal line increases, the maximum transmission ●frequency decreases. Technical reference ➜ Page F-54Use wires of AWG20 or thicker for motor line (when extended) and power supply lines, and ●use wire of AWG18 or thicker for protective earth line.To ground the driver and controller, lead the ground conductor form the protective earth ●terminal and connect the ground conductor to provide a common ground point.Provide a minimum distance of 10 cm (3.9 in.) between the signal lines and power lines (AC ●lines, motor lines and other large-current circuits).Do not run the signal lines in the same duct as power lines or bundle them with power lines.Recommended Crimp Terminals ◇Unit = mm (in.).().Crimp terminals are not provided with the products. They must be purchased separately.●Description of Input/Output Signals●Pulse (CW) and Rotation Direction (CCW) Input SignalAll Windings Off (C.OFF) Input SignalInput Circuit and Sample Connection◇P ulse (CW) and Rotation Direction (CCW) Input Signal ◇Pulse Waveform Characteristics 1-Pulse Input Mode●ON ON PulseRotation Direction22-Pulse Input Mode●CW Pulse CCW PulsePulse duty: 50% and below1 ✽T he shaded area indicates that the photocoupler diode is ON. The motor moves when the photocoupler state changes from ON to OFF.2 ✽T he minimum interval time when changing rotation direction is 50 μs. This value varies greatly depending on the motor type and load inertia.Pulse Signal Characteristics◇Keep the ●"Pulse " signal at the "photocoupler OFF " state when no pulses are being input.In 1-pulse input mode, leave the pulse signal at rest ("photocoupler ●OFF") when changing rotation directions.In 2-pulse input mode, do not input a CW pulse and CCW pulse ●simultaneously.All Windings Off (C.OFF) Input Signal◇I nputting this signal puts the motor in a non-excitation (free) state. ●This signal is used when moving the motor by external force or ●manual home position is desired. The photocoupler must be "OFF" when operating the motor.ON OFFAll Windings Off Signal Motor CurrentMotor Holding TorqueThe shaded area indicates that the motor provides holding torque in proportion to standstill current set by STOP switch.Switching the ●"All Windings Off " (C.OFF) signal from "photocoupler ON " to "photocoupler OFF " does not alter the excitation sequence.When the motor shaft is manually adjusted with the "All Windings Off " signal input, the shaft will shift up to ±3.6˚ from the position set after the "All Windings Off " signal is released.Excitation Timing (TIMING) Output Signal Overheat (O.HEAT) Output SignalOutput Circuit and Sample Connection◇E xcitation Timing (TIMING) Output Signal◇The ●"Excitation Timing " signal is output when the motor excitation is in the initial stage (step "0").The ●"Excitation Timing " signal is output simultaneously with a pulse input each time the excitation sequence returns to step"0." The excitation sequence will complete one cycle for every 7.2˚ rotation of the motor output shaft.Full step: Signal is output once every 4 pulses. Half step: Signal is output once every 8 pulses.The TIMING LED lights on the front panel when the "Excitation Timing " signal is output.Timing chart at 1.8˚/step (full step)When connected as shown in the sample connection, the signal will be "photocoupler ON" at ✽step "0."Pulse Input Signal Rotation Direction Input Signal Excitation Timing Output Signal ✽12345678910(Step) 01230123012321011121314Note:When power is turned on, the excitation sequence is reset to step "0" and the "Excitation ●Timing" signal will be output.IntroductionAS ASC5-Phase Microstep RK 2-Phase Full/Half UMK 5-Phase Microstep CRK2-Phase Microstep RBK 2-Phase Microstep CMK2-Phase PK/PV 2-Phase PK EMP400SG8030J AccessoriesInstallationAC Input DC InputAC InputDC InputWithout Encoder With EncoderControllersOverheat (O.HEAT) Output Signal◇The ●"Overheat " signal is output to protect the driver from heat damage if the internal temperature of the driver heat sink rises above 90˚C (194˚F). The O.H. LED lights on the front panel when the "Overheat " signal is output.When used as shown in the sample connection with the●overheat output logic switch set to "N.O.", the signal becomes "photocoupler ON." (Switch to "N.C." to set to the "photocoupler OFF .")You can select whether to stop the motor or continue the ●operation when an "Overheat " signal is output.If the automatic current off function switch is set to ACO position, ●output current is cut off to stop the motor when the "Overheat " signal is output.ON Pulse InputO.H.LEDOverheat OutputIf the automatic current off function switch is set to ●"OFF " position, the motor continues operation when the "Overheat " signal is output.ON Pulse InputO.H.LED Overheat Output To clear the ●"Overheat " signal, first resolve the cause and check for safety, then turn power on again.List of Motor and Driver Combinations■Model names for motor and driver combinations are shown below.●Timing Chart●MotorPower Input2-Pulse Input Mode1-Pulse Input ModeRotation DirectionInput Signal Pulse Input SignalCW Pulse Input Signal CCW Pulse Input SignalAll Windings OffInput SignalON OFF ON OFF ON OFFONOFFON OFF ON OFFCW CCW1 ✽T he minimum switching time to change direction (1-pulse input mode), and switching time to change CW, CCW pulse (2-pulse input mode) 50 μs is shown as a response time of circuit. The motor may need more time than that.2 ✽ Depends on load inertia, load torque and starting frequency.3 ✽ Never input a pulse signal immediately after switching the "All Windings Off" signal to the "photocoupler OFF" state. The motor may not start.4 ✽ Wait at least five seconds before turning on the power again.。
两相混合式步进电机驱动器SD-2H044MA概述 DescriptionsSD系列步进电机及驱动器是由本公司最新推出的高科技产品。
随着电子技术的高速发展,电子产品的工艺和性能也不断更新和提高,本产品采用超大规模的硬件集成电路,具有高度的抗干扰性及快速的响应性,从根本上解决了传统步进电机低速爬行、存在共振区、噪音大、高速力矩小、启动频率低及驱动器可靠性差等缺点。
特点 Features●先进的双极性恒流斩波驱动技术。
●高速力矩输出提高40%,避免丢步(空载启动速度达300~420r/min)最高转速达3500 r/min。
●灵活的输出电流设定,适配不同型号电机,同时具备自动半电流功能,减少电机发热。
●最大128细分设定,满足各种机械传动,而且不影响其输出力矩。
●输入脉冲模式设定及高低电平设定,便于用户使用。
●保护功能全:输入电源过压、欠压、输出过流、相间短路、驱动器高温等报警保护功能。
●电机低速无爬行现象,噪音小,无共振区。
性能指标 Mechanical Dimensions电气性能(环境温度Tj=25ºC时)输入电源24~50V直流电源供电,容量:不小于200VA。
典型值:DC36V输出电流 1.13A~4.25A,8档可调,分辨率0.41A。
驱动方式双极恒流PWM驱动输出。
绝缘电阻常温常压下>500MΩ。
绝缘强度常温常压下500V/分钟。
重量约300克。
细分设定表SW5 SW6 SW7 SW8 每转脉冲步距角SW5 SW6 SW7 SW8 每转脉冲步距角OFF ON ON ON 400 0.900 ºOFF ON OFF ON 6400 0.05625 ºON OFF ON ON 800 0.450 ºON ON OFF OFF 8000 0.045ºON ON ON OFF 1000 0.360 ºOFF ON OFF OFF 10000 0.036 ºOFF OFF ON ON 1600 0.225 ºON OFF OFF ON 12800 0.028125 ºOFF ON ON OFF 2000 0.180 ºON OFF OFF OFF 20000 0.018 ºON ON OFF ON 3200 0.1125 ºOFF OFF OFF OFF 25000 0.0144 ºON OFF ON OFF 4000 0.090ºOFF OFF OFF ON 25600 0.014063 ºOFF OFF ON OFF 5000 0.072 º适配电机:39BYG / 42BYG / 57BYG / 60BYG安装尺寸图33.5mm9.5mm104mm 120mm5mm92mm25mm27mm112mmΦ3.5mm80mm。
步进电机原理及使用说明步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
为此,51测试网在腾龙开发套件中首次引入了步进电机技术,方便用户应用掌握。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机的主要特性:1 步进电机必须加驱动才可以运转,驱动型号必须为脉冲信号,没有脉冲的时候,步进电机静止,如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。
转动的速度和脉冲的频率成正比。
2 腾龙版步进电机的步进角度为7.5 度,一圈360 度,需要48 个脉冲完成。
3 步进电机具有瞬间启动和急速停止的优越特性。
4 改变脉冲的顺序,可以方便的改变转动的方向。
因此,目前打印机,绘图仪,机器人,等等设备都以步进电机为动力核心。
步进电机原理(一)作者:来源:时间:2006-5-23 9:57:51 阅读次数:12969往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用2分类感应子式步进电机以相数可分为:二相电机三相电机四相电机五相电机等以机座号(电机外径)可分为:42BYG(BYG为感应子式步进电机代号)57BYG86BYG110BYG(国际标准),而像70BYG90BYG130BYG等均为国内标准3步进电机的静态指标术语相数:产生不同对极NS磁场的激磁线圈对数常用m表示拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A.步距角:对应一个脉冲信号,电机转子转过的角位移用表示=360度(转子齿数J*运行拍数),以常规二四相,转子齿为50齿电机为例四拍运行时步距角为=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为=360度/(50*8)=0.9度(俗称半步)定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的)静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关虽然静转矩与电磁激磁安匝数成正比,与定齿转子间的气隙有关,但过份采用减小气隙,增加激磁安匝来提高静力矩是不可取的,这样会造成电机的发热及机械噪音4步进电机动态指标及术语:1步距角精度:步进电机每转过一个步距角的实际值与理论值的误差用百分比表示:误差/步距角*100%不同运行拍数其值不同,四拍运行时应在5%之内,八拍运行时应在15%以内2失步:电机运转时运转的步数,不等于理论上的步数称之为失步3失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的4最大空载起动频率:电机在某种驱动形式电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率5最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率6运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩频特性,这是电机诸多动态曲线中最重要的,也是电机选择的根其它特性还有惯频特性起动频率特性等电机一旦选定,电机的静力矩确定,而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态电流),平均电流越大,电机输出力矩越大,即电机的频率特性越硬如下图所示其中,曲线3电流最大或电压最高;曲线1电流最小或电压最低,曲线与负载的交点为负载的最大速度点要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机一、前言步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
使用说明两相四线步进电机控制方式使用说明使用直流/步进两用驱动器可以驱动一台步进电机。
A,B端分别用短接帽接通5V电源点。
M1和M2四个接线端子分别接步进电机的两个绕组。
要实现步进电机的旋转,输入信号端IN1,IN2,IN3,IN4依次接入低电平。
(正转接入低电平的顺序是IN1→IN2→IN3→IN4,反转接入低电平的顺序是IN4→IN3→IN2→IN1)。
改变脉冲的速度即可改变电机的转动速度,脉冲越快电机的转速也就越快。
脉冲速度超过了电机的反应速度就容易造成电机失步。
(果接入信号正常,电机发生抖动现象,证明电机接线一相接反。
须调节电机接线顺序。
)四相六线步进电机控制方式使用说明使用直流/步进两用驱动器可以驱动一台四相六线步进电机和控制一台两相四线步进电机的程序是一样的。
(只是接线方式有一点不同,四相六线步进电机需要将其中的两个公共端接电源即可。
如上图接法。
)M1和M2四个接线端子分别接步进电机的两个绕组。
要实现步进电机的旋转,输入信号端IN1,IN2,IN3,IN4依次接入低电平。
(正转接入低电平的顺序是IN1→IN2→IN3→IN4,反转接入低电平的顺序是IN4→IN3→IN2→IN1)。
改变脉冲的速度即可改变电机的转动速度,脉冲越快电机的转速也就越快。
脉冲速度超过了电机的反应速度就容易造成电机失步。
(果接入信号正常,电机发生抖动现象,证明电机接线一相接反。
须调节电机接线顺序。
)下面是一个我们用C语言,使用AT89S52单片机编写的一个简单的使电机连续运行的程序及接线图:附录:步进电机控制原理步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定。