粒子滤波原理及其应用(胡士强,敬忠良著)思维导图
- 格式:xmin
- 大小:4.35 KB
- 文档页数:1
一种改进的EKPF算法在固定单站无源定位中的应用申正义;王晴晴;王洪林;郭锐【摘要】本文针对EKPF算法在固定单站无源定位目标跟踪的应用中运算量大、实时性差的问题,通过对部分粒子进行EKF采样,将EKPF算法进行改进,改进的EKPF算法不仅有效降低了运算量,同时增加了粒子的多样性,使粒子集更能体现概率密度函数的真实分布.Matlab仿真表明,与传统的EKPF算法相比,改进算法在保证滤波性能基本不变的前提下,算法运算量大幅下降.【期刊名称】《火控雷达技术》【年(卷),期】2014(043)001【总页数】5页(P9-13)【关键词】粒子滤波;扩展卡尔曼滤波;固定单站无源定位;部分采样【作者】申正义;王晴晴;王洪林;郭锐【作者单位】空军预警学院武汉430019;空军预警学院武汉430019;空军预警学院武汉430019;空军预警学院武汉430019【正文语种】中文【中图分类】TN970 引言有源雷达在现代战争中面临着电子干扰、反辐射攻击、低空超低空突防和隐身技术等一系列新的威胁。
无源定位系统本身并不向外辐射电磁波,具有受环境影响小、隐蔽性强和作用距离远等优点。
仅利用单个固定观测站接收目标辐射源辐射的信号来估计目标位置和运动状态的过程称为固定单站无源定位与跟踪。
相对于多站系统,固定单站无源定位系统只需一个无源信号接收站,且不需要数据通信传输,具有更强的隐蔽性,且设备简单、系统相对独立,作为目标探测发展的重要方向和对有源雷达系统的完善和补充,将在现代电子战中发挥越来越重要的作用[1-3]。
利用角度、相位差变化率、频率和多普勒频率变化率信息实现固定单站无源定位,是一种快速高精度的定位方法。
但参数测量都带有误差,为实现快速高精度的固定单站无源定位,除了要有高精度的参数测量技术外,还需要研究高性能的跟踪滤波算法,以便最大限度地利用观测量提供的目标运动信息,同时也可减轻对参数测量技术的压力。
固定单站无源定位目标跟踪是典型的非线性滤波过程,经典的滤波算法是扩展卡尔曼滤波(Extended Kalman Filter,EKF),但EKF算法存在线性化误差大,严重依赖于初始状态的选择,协方差矩阵易出现病态等问题。
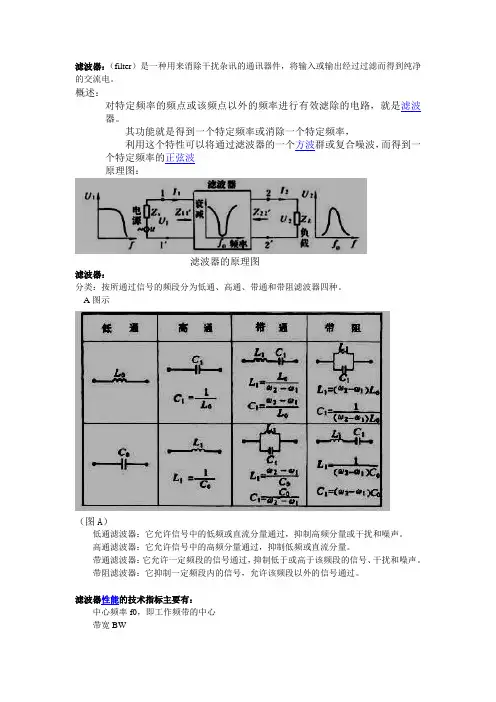
滤波器:(filter)是一种用来消除干扰杂讯的通讯器件,将输入或输出经过过滤而得到纯净的交流电。
概述:对特定频率的频点或该频点以外的频率进行有效滤除的电路,就是滤波器。
其功能就是得到一个特定频率或消除一个特定频率,利用这个特性可以将通过滤波器的一个方波群或复合噪波,而得到一个特定频率的正弦波原理图:滤波器的原理图滤波器:分类:按所通过信号的频段分为低通、高通、带通和带阻滤波器四种。
---A图示(图A)低通滤波器:它允许信号中的低频或直流分量通过,抑制高频分量或干扰和噪声。
高通滤波器:它允许信号中的高频分量通过,抑制低频或直流分量。
带通滤波器:它允许一定频段的信号通过,抑制低于或高于该频段的信号、干扰和噪声。
带阻滤波器:它抑制一定频段内的信号,允许该频段以外的信号通过。
滤波器性能的技术指标主要有:中心频率f0,即工作频带的中心带宽BW通带衰减,即通带内的最大衰减阻带衰减对于实际滤波器而言,考虑到实际的组成元件的品质因数的取值是一有限值(因为受限于材料与工艺的水平),所以所有工程上的实用滤波器都是有损滤波器,因此对于这些滤波器还应考虑通带内的最小插入衰减。
现代滤波器设计,多是采用滤波器变换的方法加以实现。
主要是通过对低通原型滤波器进行频率变换与阻抗变换,来得到新的目标滤波器。
理解带通滤波器的波形与调试方法:整个滤波器的仿真响应,可以理解为由n(n 为滤波器腔数)个相关联的单腔谐振,通过一定的组合构成。
除两个抽头腔外的每个谐振腔,形成一个在通带内的谐振峰,谐振峰之间通过不同大小的窗口耦合,排列在通带内的不同位置,形成通带。
左下图为滤波器的回波草图。
对于带通滤波器,有几个谐振腔(包括两个抽头腔)就会在通带内形成几个传输极点(即对应的图中红色圆圈内的波谷)。
回波与驻波相对应,回波曲线中的波谷,对应在驻波曲线中,也是一个波谷。
基站的基本结构带通滤波器的工作原理原始信号滤波器响应滤波后的信号带通滤波器的主要电气参数1. 带外抑制:带外抑制指,滤波器在工作频段以外的频点处对信号的衰减。
用思维导图学习高中物理电磁学
思维导图(Mind Map)是一种用图形方式展示信息和知识的工具,通过图形的连线和
组织结构,将各个概念和知识点之间的关系清晰明了地展示出来。
以下是一个用思维导图
学习高中物理电磁学的例子:
电磁学是物理学的一个重要分支,主要研究电荷、电场、磁场以及它们之间的相互作
用等内容。
为了更好地学习电磁学,我们可以将电磁学的内容进行分类和整理,形成一个
有机的知识结构。
我们可以创建一个中心节点,标题为“高中物理电磁学”,然后分成三个分支:电荷
与电场、磁场与电磁感应、电磁波。
每个分支都可以再分成更细的概念和知识点。
在电荷与电场分支下,可以进一步展开电荷、电场、库仑定律、电势、电位差等概念。
我们可以通过连线将它们相连接,并用关键词或简短的句子描述它们之间的关系和作用。
除了以上的基础概念和知识点外,我们还可以在思维导图中添加一些例题和习题,帮
助加深对概念和知识点的理解和应用。
通过思维导图的方式,我们可以清晰地看到各个概念和知识点之间的关系和作用,更
好地理解电磁学的知识,同时也可以帮助我们进行复习和巩固。
在学习过程中,还可以不
断完善和修改思维导图,使其更加完整和清晰。
粒子滤波原理及应用嘿,朋友!你知道啥是粒子滤波不?这玩意儿可神奇啦!咱先来说说粒子滤波的原理。
它就像是一群小精灵在帮忙找宝藏。
想象一下,你在一个大大的迷宫里找一颗珍贵的宝石,但是你不知道它具体在哪儿。
这时候,你派出了一群小精灵,每个小精灵都在迷宫里到处乱逛,猜测宝石可能在的位置。
随着时间的推移,那些猜测位置比较准的小精灵会被留下来,不准的就被淘汰。
最后,留下来的小精灵聚集的地方,很可能就是宝石所在的位置。
粒子滤波就是这么个道理,通过大量的“粒子”去猜测目标的状态,然后根据实际观测不断调整,最后找到最接近真实的答案。
那粒子滤波能用来干啥呢?这可多了去啦!比如说在追踪目标的时候。
就像警察追踪罪犯,罪犯到处乱跑,行踪不定。
粒子滤波就能像聪明的侦探一样,根据罪犯留下的蛛丝马迹,推测出他可能去的地方,然后准确地锁定目标。
再比如说在预测天气方面。
天气那可是变化无常,一会儿晴一会儿雨的。
粒子滤波就能根据各种气象数据,像是温度、湿度、风向等等,来预测未来的天气情况。
这难道不神奇吗?还有在金融领域,粒子滤波可以帮助分析股票价格的走势。
想象一下,股票价格就像个调皮的孩子,上蹿下跳的。
粒子滤波就能在这混乱中找到一些规律,帮助投资者做出更明智的决策。
在机器人领域,粒子滤波也大显身手。
机器人在陌生的环境中探索,不知道前方有啥障碍。
粒子滤波就能让机器人更聪明地规划路线,避免碰撞。
你说,粒子滤波是不是像个万能的魔法棒,在好多领域都能发挥作用?总之,粒子滤波是个超级厉害的工具,它就像黑暗中的明灯,为我们在不确定的世界中指引方向。
让我们能够更准确地预测、追踪和理解各种复杂的现象。
朋友,你是不是也对粒子滤波刮目相看啦?。
基于分层空间的Rao-Blackwellised化粒子滤波算法季云峰;马上;周航【摘要】Concerning the problem of low and single particles utilisation rate of the particles filter in target tracking,we propose aRao-Blackwellised particle filter algorithm which is based on layered space.The proposed algorithm marginalises the linear variable throughRao-Blackwell theorem so as to reduce the state space dimensionality and to improve the estimation precision.It can greatly reduce thenumbersof particles required while meeting the same accuracy,thus the computational load is reduced greatly as well.The layered theory candivide the particle spaces into multidimensionality.It allocates the particles reasonably by using the weight and can improve the accuracy ofthe relatedestimation.Experimental results show that the root mean square error of the proposed algorithm reduces by 50% than thetraditionalalgorithm,and the accuracy was improved in each simulation time.%针对于粒子滤波在目标跟踪里面粒子使用率低且单一等问题,提出一种基于分层空间的Rao-Blackwellised化粒子滤波算法。
粒子滤波的基本原理粒子滤波算法广泛应用在视觉跟踪领域、通信与信号处理领域、机器人、图像处理、金融经济、以及目标定位、导航、跟踪领域,其本质是利用当前和过去的观测量来估计未知量的当前值。
在粒子滤波算法中使用了大量随机样本,采用蒙特卡洛仿真来完成递推贝叶斯滤波过程,其核心是使用一组具有相应权值的随机样本(粒子)来表示状态的后验分布。
该方法的基本思路是选取一个重要性概率密度函数并从中进行随机抽样,得到一些带有相应权值的随机样本后,在状态观测的基础上调节权值的大小和粒子的位置,再使用这些样本来逼近状态后验分布,最后通过这组样本的加权求和作为状态的估计值。
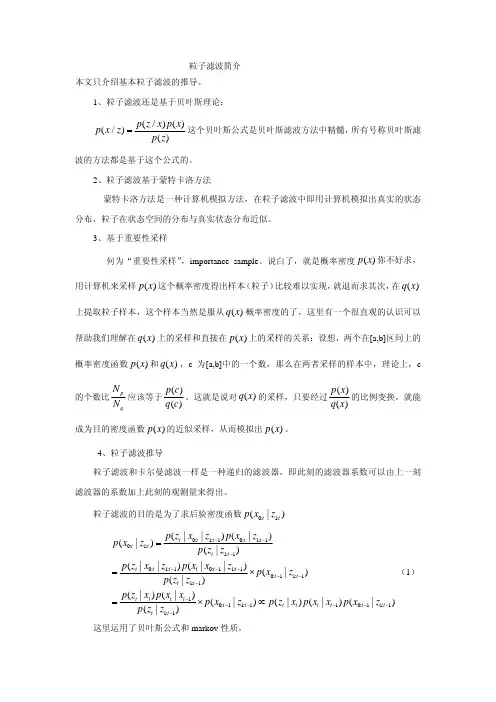
粒子滤波不受系统模型的线性和高斯假设约束,采用样本形式而不是函数形式对状态概率密度进行描述,使其不需要对状态变量的概率分布作过多的约束,适用于任意非线性非高斯动态系统,是目前最适合于非线 性、非高斯系统状态的滤波方法【Arulampalam M S, Maskell S, Gordon N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2):174-188.】1 动态系统的状态空间模型状态空间模型包括系统状态方程和观测方程,其通用的表示方法分别为【梁军. 粒子滤波算法及其应用研究[D]. 哈尔滨工业大学, 2009.】【黄小平, 王岩, 廖鹏程. 粒子滤波原理及应用——MATLAB 仿真[M].电子工业出版社. 2017】()1,k k k f -=X X W (1) (),k k k h =Z X V (2)其中()f ∙和()h ∙为已知函数,k W 和k V 是概率密度已知的随机变量,k X 代表k 时刻的状态量,k Z 代表k 时刻的观测量,k W 和k V 是相互独立的。

粒子滤波——后验概率密度的采样递推1 引言我们对如下的线性动态模型已经不感到陌生,其中i x 是i 时刻的状态矢量,,1i i −A 是状态转移矩阵,i n 为零均值Gaussian 噪声,11i i i i i −−=+x A x n (1)而观测矢量i y 则满足如下观测方程,其中,1i i −C 为观测矩阵,i v 为与i n 独立的Gaussian 噪声i i i i =+y C x v (2)在给定观测值012,,,,n y y y y 之后,我们要对系统状态i x ,例如n x 进行某种最佳估计。
不难设想,如果我们能通过某种方式获得后验概率密度01(,,,)n n P X |y y y ,那么求出这一估计将不困难。
显然,在上述线性动态模型假设下,01(,,,)n n P X |y y y 是Gaussian 的,因而估计n x 便可使用Kalman 滤波这种有效的递推算法来实现。
事实上,Kalman 滤波是线性Gaussian 模型下的最优状态估计算法。
然而,我们遇到的模型往往没有那么简单,有很多种情况使得01(,,,)n n P X |y y y 变得复杂。
例如如下的非线性动态模型,亦即,11()i i i i i −−=+x f x n (3)其中,1i i −f 是某非线性函数,而i n 则服从均值为0,协方差阵为i Σ的Gaussian 分布。
在这种情况下,01(,,,)n n P X |y y y 显然不再是Gaussian 的。
又例如,观测模型()n n P Y |X 也不再服从Gaussian 分布。
这两种情况都使得后验概率01(,,,)n n P X |y y y 的形状很不规则,估计n x 也变得非常困难。
处理非线性状态转移的权宜之计以所谓扩展Kalman 滤波为代表,其主要思想是进行局部的线性近似,其效果在很多时候并不能令人满意。
事实上,只要解决好01(,,,)n n P X |y y y 的表示问题,完成估计n x 等很多任务都会变得大大简化。