机器人配置1
- 格式:doc
- 大小:140.01 KB
- 文档页数:9
ABB机器人外部启动配置说明一、外部IO板的配置ABB标准I/O板DSQC652是最为常用的模块,下面以创建数字输入信号DI,数字输出信号DO,组输入信号GI,组输出信号GO为例做一个详细的讲解。
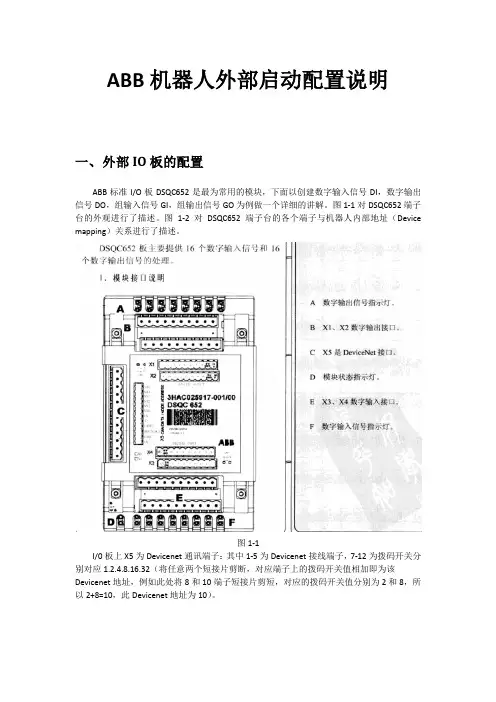
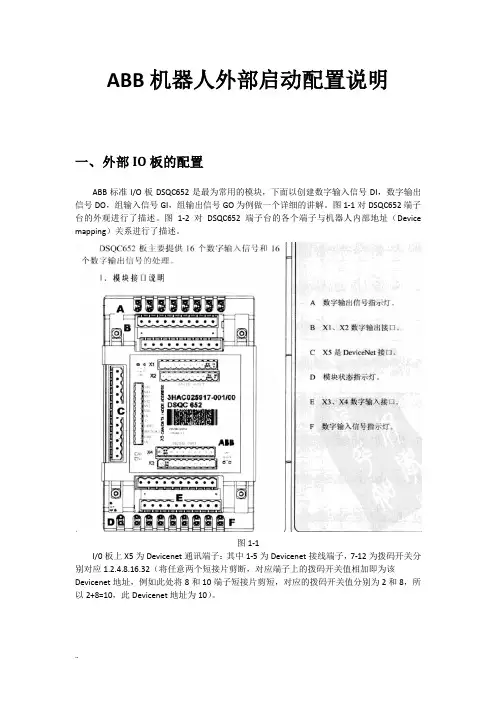
图1-1对DSQC652端子台的外观进行了描述。
图1-2对DSQC652端子台的各个端子与机器人内部地址(Device mapping)关系进行了描述。
图1-1I/0板上X5为Devicenet通讯端子:其中1-5为Devicenet接线端子,7-12为拨码开关分别对应1.2.4.8.16.32(将任意两个短接片剪断,对应端子上的拨码开关值相加即为该Devicenet地址,例如此处将8和10端子短接片剪短,对应的拨码开关值分别为2和8,所以2+8=10,此Devicenet地址为10)。
图1-21、定义DSQC652板的总线连接ABB标准I/O板都是下挂在DeviceNet现场总线下的设备,通过X5端口与DeviceNet现场总线进行通讯。
定义DSQC652板的总线连接相关参数说明见表1-1-1单击【ABB菜单】→【控制面板】→【配置】→【DeviceNet Device】→【添加】显示图1-1-1所示的界面图1-1-1单击“使用来自模板的值”行的下拉菜单,选择“DSQC 652 24 VDC I/O Device”,如图1-1-2所示图1-1-2点击【向下】按钮,找到参数名称Address,将值改成10。
单击【确定】,完成DSQC652板的总线连接。
提示“重启”选择【是】。
如图1-1-3所示图1-1-32、创建数字输入信号DI1单击【ABB菜单】→【控制面板】→【配置】→【Signal】→【添加】显示图1-2-1所示的界面,数字输入信号DI1相关参数说明见表1-2-1表1-2-1图1-2-1按照表1-2-1设定,设定完毕后如图1-2-2所示,单击【确定】,提示“重启”选择【是】,完成数字输入信号DI1的创建。
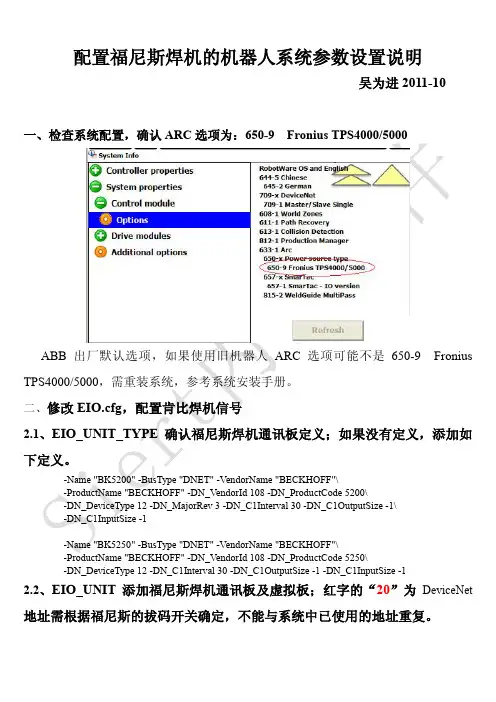
配置福尼斯焊机的机器人系统参数设置说明吴为进2011-10 一、检查系统配置,确认ARC选项为:650-9 Fronius TPS4000/5000ABB出厂默认选项,如果使用旧机器人ARC选项可能不是650-9 Fronius TPS4000/5000,需重装系统,参考系统安装手册。
二、修改EIO.cfg,配置肯比焊机信号2.1、EIO_UNIT_TYPE确认福尼斯焊机通讯板定义;如果没有定义,添加如下定义。
-Name "BK5200" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5200\-DN_DeviceType 12 -DN_MajorRev 3 -DN_C1Interval 30 -DN_C1OutputSize -1\-DN_C1InputSize -1-Name "BK5250" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5250\-DN_DeviceType 12 -DN_C1Interval 30 -DN_C1OutputSize -1 -DN_C1InputSize -12.2、EIO_UNIT添加福尼斯焊机通讯板及虚拟板;红字的“20”为DeviceNet 地址需根据福尼斯的拔码开关确定,不能与系统中已使用的地址重复。
-Name "ioFronius1" -UnitType "BK5250" -Bus "DeviceNet1" -DN_Address 20-Name "ioFroniusSim1" -UnitType "Virtual" -Bus "Virtual1"\-UnitLabel "RWArc Simulated welder"2.3、EIO_SIGNAL添加如下信号,所有信号不能修改;-Name "doFr1ArcOn" -SignalType "DO" -Unit "ioFronius1" -UnitMap "0"-Name "doFr1RobotReady" -SignalType "DO" -Unit "ioFronius1" -UnitMap "1"-Name "doFr1GasTest" -SignalType "DO" -Unit "ioFronius1" -UnitMap "8"-Name "doFr1FeedForward" -SignalType "DO" -Unit "ioFronius1" -UnitMap "9"-Name "doFr1FeedRetract" -SignalType "DO" -Unit "ioFronius1" -UnitMap "10"-Name "doFr1ErrorReset" -SignalType "DO" -Unit "ioFronius1" -UnitMap "11"-Name "doFr1TouchSense" -SignalType "DO" -Unit "ioFronius1" -UnitMap "12"-Name "doFr1TrchBlowOut" -SignalType "DO" -Unit "ioFronius1" -UnitMap "13"-Name "doFr1WeldingSim" -SignalType "DO" -Unit "ioFronius1" -UnitMap "31"-Name "diFr1ArcStable" -SignalType "DI" -Unit "ioFronius1" -UnitMap "0"\-FiltPas 50-Name "diFr1ProcessActv" -SignalType "DI" -Unit "ioFronius1" -UnitMap "2"-Name "diFr1MainCurrent" -SignalType "DI" -Unit "ioFronius1" -UnitMap "3"-Name "diFr1TorchColisn" -SignalType "DI" -Unit "ioFronius1" -UnitMap "4"-Name "diFr1WelderReady" -SignalType "DI" -Unit "ioFronius1" -UnitMap "5"-Name "diFr1CommunicRdy" -SignalType "DI" -Unit "ioFronius1" -UnitMap "6"-Name "aoFr1Power" -SignalType "AO" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aoFr1ArcLength" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 30 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535 -MinLog -30-Name "aoFr1Dynamic" -SignalType "AO" -Unit "ioFronius1" -UnitMap "64-71"\-EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10 -MaxPhysLimit 10 -MaxBitVal 255\ -MinLog -5-Name "aoFr1BurnBackCor" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "72-79" -EncType "UNSIGNED" -MaxLog 200 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255 -MinLog -200-Name "aiFr1V olt_M" -SignalType "AI" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aiFr1Current_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 1000 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "aiFr1MotorCurr_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "64-71" -EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255-Name "aiFr1WireFeed_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "80-95" -EncType "UNSIGNED" -MaxLog 366.67 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "goFr1Mode" -SignalType "GO" -Unit "ioFronius1" -UnitMap "2-4"-Name "goFr1JobNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "16-23"-Name "goFr1PrgNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "24-30"-Name "giFr1Error" -SignalType "GI" -Unit "ioFronius1" -UnitMap "8-15"-Name "siFr1WelderOK" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "0"-Name "soFr1WelderOK" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "0"-Name "siFr1StopProc" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "1"-Name "soFr1StopProc" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "1"\-Access "ALL"-Name "siFr1WireStick" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1WireStick" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1UpdateSched" -SignalType "DO" -Unit "ioFroniusSim1"\-UnitMap "3"-Name "diFr1PartDetect" -SignalType "DI" -Unit "ioFroniusSim1"\-UnitMap "4"-Name "doFr1SensorRef" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "4"-Name "soFr1ArcOn" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "5"2.4、添加电弧反馈虚拟信号,解决跟踪路径不保存问题。

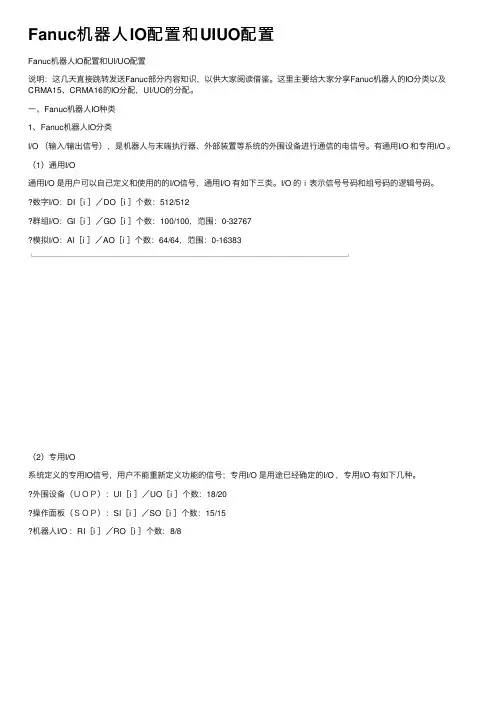
Fanuc机器人IO配置和UI/UO配置说明:这几天直接跳转发送Fanuc部分内容知识,以供大家阅读借鉴。
这里主要给大家分享Fanuc机器人的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
一、Fanuc机器人IO种类1、Fanuc机器人IO分类I/O (输入/输出信号),是机器人与末端执行器、外部装置等系统的外围设备进行通信的电信号。
有通用 I/O 和专用 I/O 。
(1)通用 I/O通用I/O 是用户可以自己定义和使用的的 I/O信号,通用 I/O 有如下三类。
I/O 的i表示信号号码和组号码的逻辑号码。
•数字 I/O:DI[ i ]/DO[ i ]个数:512/512•群组 I/O:GI[ i ]/GO[ i ]个数:100/100,范围:0-32767•模拟 I/O:AI[ i ]/AO[ i ]个数:64/64,范围:0-16383(2)专用 I/O系统定义的专用IO信号,用户不能重新定义功能的信号;专用 I/O 是用途已经确定的 I/O ,专用 I/O 有如下几种。
•外围设备(UOP):UI[ i ]/UO[ i ]个数:18/20•操作面板(SOP):SI[ i ]/SO[ i ]个数:15/15•机器人 I/O :RI[ i ]/RO[ i ]个数:8/83、Fanuc机器人图片(图片来自百度网络)二、Fanuc机器人通讯IO模块1、Fanuc机器人硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
•0 =处理 I/O 印刷电路板•1~16=I/O 单元 MODELA/B•32 =I/O LINK 从动装置•48 =外围设备控制接口(CRMA15、CRMA16)2、Fanuc机器人CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
•使用处理 I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
•使用 I/O 单元 MODEL A/B的情况下,则为用来识别所连接模块的号码。
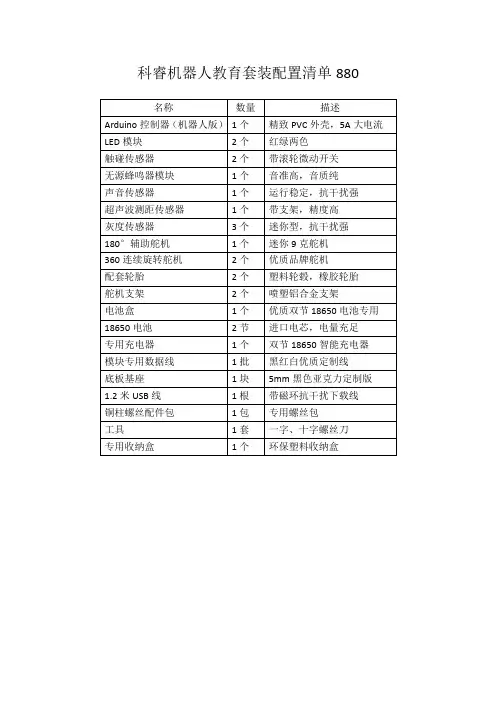
中鸣教育机器人简介中鸣智能教育机器人一中鸣智能教育机器人配置清单E2-RCUUSB下载版 1个灰度测量模块3个触碰测量模块2个3色LED灯 2个高性能编码马达 2个传感器马达连接线 9条USB下载 1条软件光盘 1张彩色小册子 1本积木件轮胎齿轮等120多件二中鸣智能教育机器人配置说明1机械结构基于积木思想设计可拼装和可重复使用提供了120多件积木件2编程软件兼有图形化编程和C语言代码编程界面中文操作界面易学易用方便用户从零开始循序渐进学习编程思想和代码编程界面华丽人性化设计易学易用编程方式灵活支持流程图标代码或混合方式编程且图标与代码可同步及对照显示方便代码学习及调试个性化设置桌面线条颜色及提示信息项目均可由用户自行设定完善的在线帮助和提示系统让用户不需记忆及查找手册即可轻松编写程序支持用户自建图标或模块满足DIY玩家的更高要求3主控制器32位高性能ARM处理器Cortex-M3内核主频高达72MHZ内置512K程序存储器64K数据缓冲器200个16位数据保存器可直接修改EEPROM里的参数变量程序调试更方便更快捷并可存储多个测试程序进入RCU随时随地变更程序运行减少来回调试的时间12路六芯RJ11接口其中8路数字模拟复用端口4路带编码盘马达端口内置超大屏幕24" LCD 分辨率达320240 65万色带触摸屏24G无线通讯功能支持无线下载电源检测MIC蜂鸣器可发出频率为20Hz20kHz的声音和6节电池盒带有USBUSB20全高速下载接口支持U 盘模式电源DC55×20插座输入电压范围 DC6V---9V有2个功能按键支持自定义按键功能1个开关键等端口及按键支持各种模拟数字传感器支持编码盘马达的使用有丰富的软件支持4标配传感器 3个灰度检测传感器可选择自身发射2个触碰检测传感器5其他标准配置2个三色灯模块2个带编码盘的直流减速马达1条下载线三中鸣只能教育机器人简要使用说明1核心控制器具备MIC音量检测数据显示嗡鸣器发音时间控制无线通讯功能核心控制器外观2外部设备实物功能对照表类型模块名称实物图片程序控制图标程序说明E 2 核心控制器内置模块内置MIC模块能够时间检测声音的强弱液晶1位显示在显示屏的指定位置将显示1个字符的数据能够设置显示屏幕的背景颜色3位数字显示在显示屏的指定位置显示3位数内任意有效数字能够设置显示屏的背景颜色占3个有效位置5位数字显示在显示屏的指定位置显示5位数内任意有效数字能够设置显示屏的背景颜色占5个有效位置8位数字显示在显示屏的指定位置显示8位数内任意有效数字能够设置显示屏的背景颜色占8个有效位置单词显示在显示屏的指定位置显示单词能够设置显示屏的背景颜色占8个有效位置嗡鸣器可控的发音时间控制模块系统提供4个单位级别的时间控制模块数据存储模块提供提供200个数据存储空间能够方便的进行数据的写入和读取提高了程序设计的灵活性电压监测模块提供实时监测控制器供电电压功能更有效的更具实际用电情况进行程序设计无线传输模块提供两个机器人之间的通讯和数据传输功能增强了机器人与机器人之间的交互性E 2 教育核心控制外置模块马达模块 E2机器人的动作执行模块具有3中执行状态执行速度程序可控与控制器M1-M4任意输出端口链接行程记录模块内置在马达模块内能够监控马达的旋转角度及旋转速度实现获取马达行程的功能与控制器M1-M4任意输出端口链接灰度测量模块能实现机器人识别不同颜色的功能颜色有效值范围0-4095数据越大颜色越亮发射检测光源程序可控任意与控制器P1-P8端口连接触碰测量模块能实现机器人识别碰撞的功能有效值范围01任意与控制器P1-P8端口连接三色发光模块实现三色LED发光可控在程序设计中用于指导程序断点位置和程序执行情况告知功能四认识机器人程序给机器人编程的是中鸣数码编程软件软件安装好后在桌面会有一个快捷方式的图标第一步双击运行中鸣数码编程软件出现欢迎界面程序打开后出现的编程界面在第一次打开软件的时候我们先要将软件设置的类型与控制器的类型一致并且在下一次软件启动才生效设置完成并重新启动软件我们就可以放心使用了第二步打开软件后我们可以通过新建一个程序开始编程了新建程序选择的选项项目类型图形化编程 -----图标式的编程界面模板主程序 -----能直接下载到机器人控制器的程序能够调用子程序而不被任何子程序所调用位置程序存储的地址名称程序的命名说明程序的注释说明选择图形化编程主程序位置设置好存储地址可默认名称输入程序名称说明输入程序说明选择确定进入程序编程界面第三步编写程序链接图标在图标库找到所需要的图标这里以内置模块的3位数字显示为例找到3位数字显示图标用鼠标按住图标拖拉到编辑区域内开始图标后面放开鼠标完成图标拖拽动作鼠标移动到前一图标的右上角位置出现连线工具单击确认连线鼠标变成连线状态并牵引链接线将鼠标移动到链接图标的左上角单击确认完成连线依此类推完成其他图标的连线只有与开始图标链接的图标才能生效有效图标为彩色否则视为无效图标无效图标为灰色但没有连线的图标是允许放在编辑区域内的正确连线错误连线第四步链接传输线编译下载程序将USB程序传输线一端与电脑的USB链接系统自动寻找驱动直至系统提示该下载线已经可以使用编译F9保存程序检测程序是否完整语句格式是否正确等在软件左下角输出栏提示编译成功表示程序无错误问题下载F10传输线已经与电脑正确链接方可将程序从电脑下载到机器人核心控制器出现等待链接窗口将传输线另外一端与控制器链接好后按下控制器电源开关程序自动下载到机器人控制器下载提示窗口自动关闭表示下载完毕按下电源按钮关闭电源拔出与控制衔接端的下载线再次按下电源按钮即为运行已下载的程序四机器人实际课例例子一机器人往返竞速赛教学目标知识目标了解机器人主控器E2RCU的功能了解马达的运转带动齿轮及机器的运转知道机器人的运作原理2能力目标通过实践培养学生的观察能力动手能力创造能力具体要达到①学会使用主控器如何将马达的连接到主控器上②初步练习用电脑编程控制机器人启动机器人③观察机器人的运作原理思考是否能改进使它运作得更好一些3情感目标培养学生对待知识的科学态度和辩证唯物主义观点培养学生探索机器人的兴趣和科学精神培养良好的生活习惯与人的沟通与合作对他人的尊重面对困难的毅志力与自信心的树立及时间的合理分配和利用教学重点难点重点正确完成对马达的连接编辑简单程序控制马达难点正确完成对马达的连接用电脑控制启动机器人改进机器人结构使它速度变得更快一些教学方法以2-4人为一小组通过小组竞技以学生直接体验为主并辅以教师启发引导教学准备机器人快车学习版套装教学过程1引入今天我们要给自己亲手做的机器人装上大脑到时我们亲手制作的机器人在我们的控制下运行起来进一步激发学生兴趣新课今天是将机器人由静态进入动态由机械结构状态变成系统程序控制下的机器人同学们先看桌子上的器械这是我们自己上节课搭建的主控器马达若干积木螺丝钉等下面我们来看一下该如何接线用投影展示拼装过程让学生进一步学会看图知道这堂课要掌握如何把马达连接到主控器上使学生的学习更有效抽样检查然后运用编程软件进行编程介绍指导实验指导学生分组实验到各小组巡视根据学生的能力引导学生去发现不同的问题如马达已经连接正确马达却不转是什么原因该如何排除故障马达转动了转动却方向不对什么原因该如何解决等等并启发学生分析问题解决问题让每个学生都能参与小组讨论都能有所收获4课堂体验让他们从具体的马达带动齿轮小齿轮带动大齿轮的体验中感受力学知识从开关控制马达的转动中体验电学知识从电脑控制机器人运作体验信息技术知识并在动手做的过程中观察体验思考我学会了什么我怎样才能做得更好这与我们的生活有什么联系5每组派一名代表到竟速机器人场地进行机器人竟速比赛通过组与组之间的比较不断改进取得更好成绩6评价激励成果分享对实验成功的学生给予表扬并鼓励改进实验的方法对实验失败的学生要帮助分析原因重树他们的自信心不论成功还是失败每个小组都会发现一些问题以及对这些问题的分析和议论或是对实验有创意的想法和设计让每个小组发表见解大家参与评价分享程序范例示意图例子二巡黑线行走机器人教学目标知识目标了解机器人主控器E2RCU的功能了解光电传感器-灰度检测模块的使用通过灰度检测模块控制马达状态2能力目标通过实践培养学生的观察能力动手能力创造能力具体要达到①学会使用主控器如何将灰度检测模块连接到主控器上②练习用电脑编程控制机器人按照黑色轨迹线行进③观察机器人的运作原理思考是否能改进使它运作得更好一些3情感目标培养学生对待知识的科学态度和辩证唯物主义观点培养学生探索机器人的兴趣和科学精神培养良好的生活习惯与人的沟通与合作对他人的尊重面对困难的毅志力与自信心的树立及时间的合理分配和利用教学重点难点重点理解变量的意义灰度检测模块的使用难点理解灰度检测模块检测到的值和比范围值之间的关系通过条件判断语句进行选择执行动作教学方法以2-4人为一小组通过小组竞技以学生直接体验为主并辅以教师启发引导教学准备机器人快车学习版套装一套教学过程1引入今天我们要给自己亲手做的机器人能够按照一定的轨迹线进行行走而不脱离轨迹线新课我们来了解一下机器人是通过什么来识别轨迹线的机器人的眼睛就是通过灰度检测模块来检测颜色的变化它和人类的眼睛一样能识别不同颜色回忆上节课的如何接线的内容运用编程软件进行编程介绍我们怎么知道灰度检测模块所看到的值是多少怎么运用这个值去做判断呢指导实验指导学生分组实验到各小组巡视根据学生的能力引导学生去发现不同的问题如灰度检测模块已经连接正确却没有读数是什么原因该如何排除故障有读数了读数没有随颜色的变化而变化什么原因该如何解决等等并启发学生分析问题解决问题让每个学生都能参与小组讨论都能有所收获4课堂体验先从一个灰度检测模块如何使用开始讲解根据学生的接受能力和让学生思考如何能走得更快更准引入两个灰度检测模块甚至三个灰度检测模块如何更准确的走轨迹线并在动手做的过程中观察体验思考我学会了什么我怎样才能做得更好这与我们的生活有什么联系5评价激励成果分享对实验成功的学生给予表扬并鼓励改进实验的方法对实验失败的学生要帮助分析原因重树他们的自信心不论成功还是失败每个小组都会发现一些问题以及对这些问题的分析和议论或是对实验有创意的想法和设计让每个小组发表见解大家参与评价分享程序范例一个灰度模块走黑线例子程序程序说明程序开始进入一个大循环不断检测接P1端口上灰度测量模块的数据灰度测量模块安装在机器人的左侧并一直处于黑线的左侧通过分支判断得到两种情况情况一L2000 满足此条件表示机器人已经碰到黑线灰度测量在黑线左侧所以机器人的M1左马达停止M2右马达前进速度50机器人的调整状态就是缓慢的向左偏离情况二L2000满足此条件表示机器人已经到达不是黑线的位置灰度测量检测不到黑线前提又是灰度测量在黑线的左侧就需要将机器人向右调整即机器人M1左马达前进速度50M2右马达停止机器人的调整状态就是缓慢的向右偏离直到再次出现情况一将两种情况进行循环就得到了一个灰度测量模块走黑线的例子程序两个灰度模块走黑线例子程序两个灰度测量模块走黑线程序与一个灰度测量模块走黑线的程序类似只是多了第二个灰度测量的分支判断这个判断是一个进阶的分支判断首先检测的是左边的灰度测量是否检测到黑线左边无检测就判断右边的灰度测量时候有检测到黑线右边检测到黑线则机器人向右调整左右都没有检测到黑线M1 M2 马达直走速度50。
Fanuc机器⼈IO配置和UIUO配置Fanuc机器⼈IO配置和UI/UO配置说明:这⼏天直接跳转发送Fanuc部分内容知识,以供⼤家阅读借鉴。
这⾥主要给⼤家分享Fanuc机器⼈的IO分类以及CRMA15、CRMA16的IO分配,UI/UO的分配。
⼀、Fanuc机器⼈IO种类1、Fanuc机器⼈IO分类I/O (输⼊/输出信号),是机器⼈与末端执⾏器、外部装置等系统的外围设备进⾏通信的电信号。
有通⽤I/O 和专⽤I/O 。
(1)通⽤I/O通⽤I/O 是⽤户可以⾃⼰定义和使⽤的的I/O信号,通⽤I/O 有如下三类。
I/O 的i表⽰信号号码和组号码的逻辑号码。
数字I/O:DI[i ]/DO[i ]个数:512/512群组I/O:GI[i ]/GO[i ]个数:100/100,范围:0-32767模拟I/O:AI[i ]/AO[i ]个数:64/64,范围:0-16383(2)专⽤I/O系统定义的专⽤IO信号,⽤户不能重新定义功能的信号;专⽤I/O 是⽤途已经确定的I/O ,专⽤I/O 有如下⼏种。
外围设备(UOP):UI[i ]/UO[i ]个数:18/20操作⾯板(SOP):SI[i ]/SO[i ]个数:15/15机器⼈I/O :RI[i ]/RO[i ]个数:8/83、Fanuc机器⼈图⽚(图⽚来⾃百度⽹络)⼆、Fanuc机器⼈通讯IO模块1、Fanuc机器⼈硬件种类和机架号机架系指构成I/O 模块的硬件的种类。
?0 =处理I/O 印刷电路板1~16=I/O 单元MODELA/B32 =I/O LINK 从动装置48 =外围设备控制接⼝(CRMA15、CRMA16)2、Fanuc机器⼈CRMA15、CRMA16插槽插槽系指构成机架的I/O 模块部件的号码。
使⽤处理I/O 印刷电路板的情况下,按所连接的印刷电路板顺序分别为插槽1、2...。
使⽤I/O 单元MODEL A/B的情况下,则为⽤来识别所连接模块的号码。
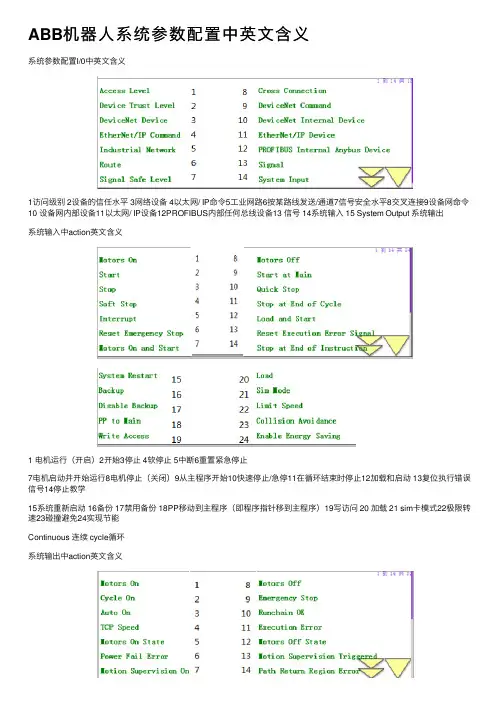
ABB机器⼈系统参数配置中英⽂含义系统参数配置I/0中英⽂含义1访问级别 2设备的信任⽔平 3⽹络设备 4以太⽹/ IP命令5⼯业⽹路6按某路线发送/通道7信号安全⽔平8交叉连接9设备⽹命令10 设备⽹内部设备11以太⽹/ IP设备12PROFIBUS内部任何总线设备13 信号 14系统输⼊ 15 System Output 系统输出系统输⼊中action英⽂含义1 电机运⾏(开启)2开始3停⽌ 4软停⽌ 5中断6重置紧急停⽌7电机启动并开始运⾏8电机停⽌(关闭)9从主程序开始10快速停⽌/急停11在循环结束时停⽌12加载和启动 13复位执⾏错误信号14停⽌教学15系统重新启动 16备份 17禁⽤备份 18PP移动到主程序(即程序指针移到主程序)19写访问 20 加载 21 sim卡模式22极限转速23碰撞避免24实现节能Continuous 连续 cycle循环系统输出中action英⽂含义1电机运⾏(开启) 2循环开启 3⾃动开启 4TCP速度 5电机接通状态 6电源故障错误 7运动监督 8电机停⽌(关闭)9紧急停⽌10解除已ok 11执⾏错误12电机关闭状态13运动监督触发14路径返回区误差 16 TCP速度参考值17机械装置活动18机械装置不动作19备份进⾏中20 sim卡模式 21碰撞避免23模拟输⼊输出24任务执⾏25⽣产执⾏错误26备份错误27极限转速28写⼊存取30节能模式31温度报警32SMB电池电量低34CPU 风扇不运⾏35绝对精度活跃36系统输⼊忙系统参数配置man-machine communication(⼈机通信)中英⽂含义automtically switch jog unit:⾃动切换点动(慢速)装置most common I/O signal 最常见的I/O信号most common instruction-list 2最常见的说明-列表2Production Permissiom ⽣产许可Backup Settings备份设置most common instruction-list 1最常见的说明-列表1most common instruction-list 3最常见的说明-列表3W arning at Start警告在开始。
川崎机器人配置外部自动
一、板卡介绍
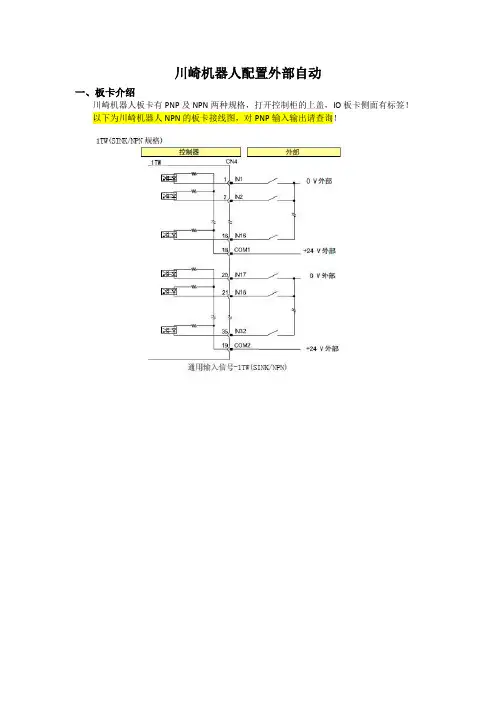
川崎机器人板卡有PNP及NPN两种规格,打开控制柜的上盖,IO板卡侧面有标签!
以下为川崎机器人NPN的板卡接线图,对PNP输入输出请查询!
二、接线注意事项
1、需要外供24V电源!
2、输入信号18针脚为外供24V,1-16为外供输入0V,19针脚为外供24V,20-35针脚为外供0V(18为1-16的公共端,19为20-35的公共端)
3、同样输出信号按照接线图接输出信号即可!
4、多次确认无误再开机,进行IO测试!
三、川崎机器人最高权限为R9894
最高权限可以打开部分隐藏的功能。
四、选择辅助—输入/输出—专用输入信号
1、对外部马达电源ON、外部故障复位、外部循环启动、外部停止(EXT_IT)分别定
义信号;
2、定义信号后,A+左右按键,使其专用打钩确认;
3、外部停止(EXT_IT)为常闭信号,相当于暂停旋钮,当无此信号机器人处于暂停状
态;
五、运行程序
1、程序选择主程序,光标选中主程序第一行;
2、示教器及控制柜的钥匙打成自动;
3、确定好外部自动的速度,选择步骤连续,周期连续!
4、先给外部马达电源ON(脉冲)
5、外部故障复位(脉冲)
6、外部循环启动(脉冲)
7、机器人即运动起来!。
abb机器人单周和连续运行模式切换的配置方法嘿,朋友们!今天咱就来聊聊 ABB 机器人单周和连续运行模式切换的配置方法。
这可真是个有意思的事儿呢!你想想看,这机器人就像个聪明的小伙伴,能在不同的模式下大显身手。
单周模式呢,就好像是它在按部就班地完成一项特定的任务,一步一个脚印,稳稳当当的。
而连续运行模式呢,那就是它火力全开,不停地奔跑向前,一刻也不停歇呀!那怎么来给它切换模式呢?这可得有点小窍门哦!首先,咱得找到那个关键的设置地方,就像找到打开宝藏的钥匙孔一样。
然后呢,根据具体的要求和情况,来调整那些参数呀,设置呀,让机器人明白咱是要它单周跑呢,还是连续跑呢。
这就好比咱给机器人穿上不同的鞋子,单周模式的鞋子让它走得稳稳当当,连续模式的鞋子让它跑得飞快。
要是弄错了鞋子,那可就麻烦啦,机器人可能就不知所措啦!在配置的时候,可得细心再细心,别马虎大意哦!就像给花浇水,多了少了都不行,得恰到好处。
要是不小心弄错了一点,那机器人可能就不按咱的想法来啦,说不定还会闹点小脾气呢!而且呀,这配置方法可不是一成不变的,得根据实际的应用场景来灵活调整。
比如说,在这个场合下,单周模式更合适,那咱就赶紧给它换上单周的“鞋子”。
到了另一个地方,连续运行模式更能发挥作用,那就麻溜地给它换上连续模式的“鞋子”。
这就好像咱人一样,在不同的场合要穿不同的衣服,合适最重要呀!可不能不管不顾,随便给机器人套个模式就完事儿了。
总之呢,ABB 机器人单周和连续运行模式切换的配置方法,就是要咱用心去对待,像照顾小朋友一样,给它最合适的安排。
这样它才能更好地为我们服务,帮我们完成各种任务呀!所以呀,大家可得好好掌握这个方法,让我们的机器人小伙伴发挥出最大的作用!别小看这小小的切换,这里面可藏着大学问呢!。
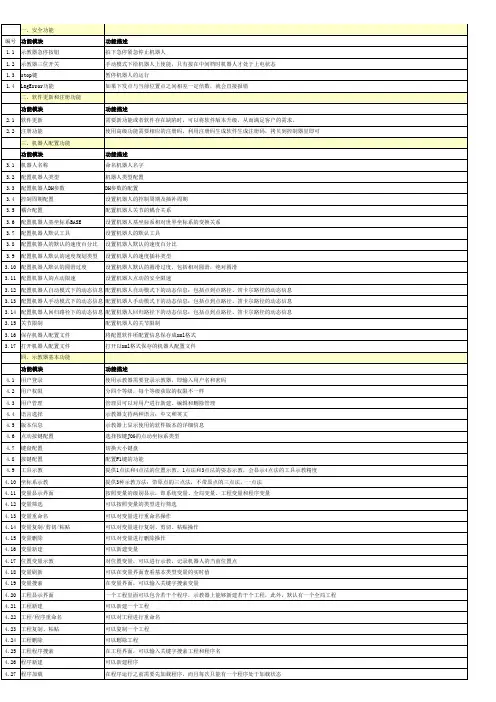
目录一、接线 (2)1.1电源接线 (2)1.2安全回路接线 (2)1.3通信板卡 (3)1.4碰撞传感器接口短接 (3)二、系统文件 (4)2.1拷贝PLC文件到示教器 (4)2.2 运行拷贝的PLC文件 (5)2.3 机器人与博途的变量对应 (6)三、其他设置 (11)3.1原点位置设置 (11)3.2 示教模式时无法输出变量 (12)3.3再生模式下外部自动需要的信号 (12)3.4 操作权限变更 (13)3.5 通信设置 (13)3.6切换为再生模式 (14)3.7外部自动只运行示教器选中的程序 (15)3.8 内部自动运行示教器程序 (16)3.9 示教器监视器的使用 (17)3.10 运行速度问题 (18)一、接线1.1电源接线OTC机器人自带变压器(380V AC-200V AC),故OTC机器人前端的断路器需要用D型。
1.2安全回路接线TBEX1:为输入端。
将1和2,3和4分别接到安全回路两个继电器的常开触点即可。
其他引脚不用管TBEX2:为输出端。
将1和2,3和4分别串联接入急停按钮的两个回路(注意正负)。
其他引脚不用管1.3通信板卡机器人控制箱内有3个通信板卡插槽,从左往右1-3编号,一般默认将通信板卡插入1号卡槽,PN通讯网线从通信板卡接到交换机中。
1.4碰撞传感器接口短接若示教器手动移动机器人后出现以下报警:解决办法:1.将机器人以下接口用线短接即可。
2.机器人控制箱内有个短接板卡,在短接板卡内短接即可(短接板卡是供应商发过来的,我没见过这个短接板卡长啥样)二、系统文件注:OTC机器人默认是弧焊版,购买时最好让供应商升级到激光版2.1拷贝PLC文件到示教器将装有PLC系统文件的U盘插入机器人控制柜,从U盘将对应的两个文件拷贝到示教器内部存储器---PLC文件夹中。
复制方法:先选择好文件复制的目标位置(文件要复制到哪个文件夹),再选择需要复制的文件,按复制即可,没有粘贴动作。
1、安装蓝牙驱动
2、查看蓝牙端口号,这里是COM10
3、打开虚拟终端
1、输入用户名:root[每次输入指令后都按回车键]
2、输入:cd/[cd和/之间有空格。
这里是选择cd目录]
3、输入:ls[此时列出cd目录]
4、输入:cd/jffs[cd和/之间有空格。
这里是选择cd目录下的子目录jffs]
5、输入:ls[此时列出jffs目录]
6、输入:./run2.sh[注意/前有.,这里是执行run2.sh文件]
Run1.sh、Run2.sh是塔米机器人的手动程序,Run1.sh不可以控制摄像头上的舵机,Run2.sh可以。
执行这两个文件时,手动控制按键为电脑上的键盘按键,其定义为:
小车控制:
W前进S后退A左转D右转
摄像头控制:
J左转L右转I向前K向后O摄像头复位
7、输入:r[退出程序]。
儿童教育机器人配备随着科技的发展和智能化的进步,儿童教育机器人作为一种创新的教育工具,越来越受到家长和教育机构的青睐。
机器人教育给儿童带来了全新的学习体验和更广阔的教育空间。
本文将探讨儿童教育机器人配备的重要性和机器人在儿童教育中的应用。
一、儿童教育机器人的重要性儿童教育机器人是通过人工智能技术和机器人技术相结合,为儿童提供有趣而又富有挑战性的学习环境。
它不仅可以帮助儿童提高计算能力、逻辑思维和创造力,还可以培养他们的合作精神和解决问题的能力。
儿童教育机器人能够根据不同年龄段儿童的特点和需求进行个性化教学,使教育更有效果,更具趣味性。
二、机器人在儿童教育中的应用1. 学习助手:儿童教育机器人可以作为学习助手,帮助儿童完成作业、解答问题和复习知识。
机器人可以根据儿童的学习进度和能力,提供精准的教学辅导,并在学习过程中给予鼓励和奖励,激发儿童的学习兴趣和自信心。
2. 编程教育:机器人编程已经成为现代教育的重要组成部分。
儿童教育机器人可搭配相应的编程软件,让儿童通过编程控制机器人的动作和行为,培养他们的逻辑思维、创造力和解决问题的能力。
通过编程教育,儿童能够了解到科技的应用和工程的原理,为他们的未来发展打下坚实的基础。
3. 社交互动:儿童教育机器人可以与儿童进行互动交流,模拟真实的社交场景。
机器人可以通过语音交流、情感识别和表情变化,引发儿童的情感共鸣,提高他们的社交能力和情商。
机器人还可以与多个儿童一起合作进行任务,培养他们的合作精神和团队意识。
4. STEM教育:儿童教育机器人结合科学、技术、工程和数学的教育,通过实践和探索的方式培养儿童的创新思维和解决问题的能力。
机器人可以帮助儿童进行实验和模型搭建,让他们在实际操作中理解科学原理,培养他们的实践能力和科学素养。
三、如何选择合适的儿童教育机器人在选择儿童教育机器人时,家长和教育机构需要考虑以下几个方面:1. 教育目标:明确教育目标,确定机器人所要具备的功能和特性。