信号与系统分析第8章 数字滤波器
- 格式:ppt
- 大小:1.10 MB
- 文档页数:59
数字滤波器原理
数字滤波器是一种利用数字信号处理技术对数字信号进行滤波处理的电子设备或算法。
它的原理是基于信号的时域或频域特性进行滤波操作,通过改变信号的频谱特征,实现对信号中的某些频率成分的增强或抑制。
数字滤波器主要由滤波器系数和滤波器结构两部分组成。
滤波器系数决定了滤波器的频率响应,而滤波器结构则决定了滤波器的实现方式。
常见的数字滤波器结构有有限冲激响应(FIR)滤波器和无限冲激响应(IIR)滤波器。
FIR滤波器是一种线性相位滤波器,它的特点是稳定性好、易
于设计和实现。
FIR滤波器通过滤波器系数的加权和来计算输
出信号,这些系数可以通过窗函数或频率采样等方法进行设计。
FIR滤波器具有零相位特性,不会引入额外的相位延迟。
IIR滤波器是一种非线性相位滤波器,它的特点是具有更窄的
过渡带和更陡峭的滚降特性。
IIR滤波器通过反馈回路来实现,它的输出信号是当前输入信号和过去输出信号的加权和。
IIR
滤波器的设计较为复杂,需要考虑稳定性和振荡等问题。
数字滤波器的设计可以通过滤波器设计软件或者手动计算滤波器系数来完成。
一般的设计流程包括确定滤波器的类型和性能要求、选择滤波器结构、计算滤波器系数、进行模拟和数字滤波器的验证。
数字滤波器在信号处理领域有着广泛的应用。
它可以用于音频
处理、图像处理、无线通信、生物信号处理等各个领域。
通过选择不同类型的数字滤波器和调整滤波器参数,可以实现对信号的去噪、频率选择、频率响应均衡等功能,提高信号质量和提取需要的信息。
基于Matlab的信号分析与数字滤波器设计作者:赵子曦来源:《电脑知识与技术》2021年第29期摘要:对于信号的时域分析只能获取部分信息,因此在频域作出信号频谱以辅助分析显得十分重要。
在进行频谱分析后,会发现信号包含复杂噪声,因此使用软件设计滤波器去噪。
在Matlab的基础上,本文首先采用经典的傅里叶变换对各类信号进行频谱分析,然后用窗函数法设计FIR数字滤波器。
在声音信号上的实验证明,本文设计的FIR数字滤波器可以有效压制噪声,提取良好声音信号。
关键词:信号频谱分析; Matlab;滤波器;信号去噪中图分类号:TP311 文献标识码:A文章编号:1009-3044(2021)29-0114-02进入21世纪以来,计算机技术飞速发展,大数据、物联网、人工智能(AI:Artificial Intelligence)成为学界、工业界的研究热点,随之对信号分析技术提出了更高的要求,也带来了新的机遇。
在摩尔定律的基础上,计算机有限的算力在复杂数据的处理上显得吃力,而现代数据处理又十分追求更高的效率、更快的速度和更准确的结果。
Matlab是工程领域应用广泛的一款成熟软件,它拥有强大的矩阵运算能力和科学数据处理能力,可以处理十分微小的电路信号,因此使用Matlab进行信号分析与处理、数字滤波器设计等对于电路分析、小信号分析、波形重整具有十分重要的意义。
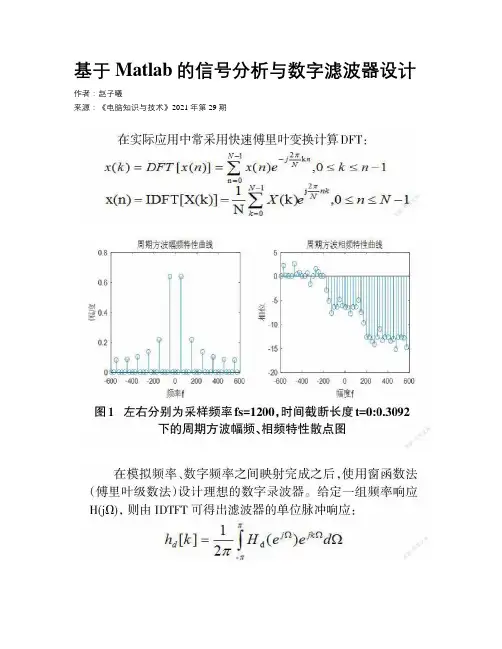
1信号频域分析1.1离散傅里叶变换与窗函数实际上,计算机存储的所有数据都是离散的,它们需要运用时域和频域都是离散的离散傅里叶变换(Discrete Fourier Transform,DFT)进行处理。
TD(Time-Domain)连续信号经采样后,通过快速傅里叶变换成为FD(Frequency-Domain)采样。
通过数学表达式绘图,不难看出输入DFT进行变换的时域信号和变换后输出的频域信号均为有限长序列,即主值序列。
在实际应用中常采用快速傅里叶变换计算DFT:连续周期、连续非周期、离散周期、离散非周期信号的频谱与 DFT之间的关系:时域上的信号是非周期的,则频域上的信号是连续的;时域上的信号是周期的,则频域上的信号是离散的;反之亦然。
数字滤波器工作原理数字滤波器是数字信号处理中常用的一种工具,用于对数字信号进行滤波处理,去除噪声、调整信号频率等。
数字滤波器的工作原理可以简单理解为对输入信号进行加权求和的过程,通过设计不同的滤波器结构和参数,实现不同的信号处理效果。
1. 数字滤波器分类数字滤波器主要分为两类:有限冲激响应(FIR)滤波器和无限脉冲响应(IIR)滤波器。
FIR滤波器的输出仅依赖于输入信号的有限历史数据,具有稳定性和线性相位特性;而IIR滤波器的输出不仅取决于输入信号,还受到输出以前的反馈数据的影响,其性能灵活但需要对滤波器的稳定性进行仔细设计。
2. FIR数字滤波器FIR滤波器是一种线性时不变系统,其核心是线性组合和延迟操作。
以一维离散信号为例,FIR滤波器对输入信号进行加权求和,利用滤波器的系数和输入信号的延迟版本进行计算,从而得到输出信号。
FIR滤波器常用于需要精确控制频率响应和相位特性的应用。
3. IIR数字滤波器IIR滤波器采用递归结构,其中输出不仅与当前输入有关,还依赖于过去的输出。
IIR 滤波器的反馈机制可以实现比FIR滤波器更高阶的滤波效果,但也容易引入不稳定性和非线性相位特性。
设计IIR滤波器需要谨慎考虑系统的稳定性和滤波效果的均衡。
4. 数字滤波器设计数字滤波器的设计通常包括滤波器类型选择、频率响应设计和系数计算等步骤。
通过在频域和时域之间进行转换,可以实现对信号的频率选择性滤波。
常见的设计方法包括窗函数法、频率采样法、最小均方误差法等,在设计过程中需要考虑滤波器的性能指标和工程应用需求。
5. 数字滤波器应用数字滤波器在信号处理领域有着广泛的应用,如音频处理、图像处理、通信系统等。
通过合理选择滤波器类型和参数,可以实现信号去噪、信号增强、频率选择等功能。
在实际工程中,工程师们经常根据具体的应用要求设计并优化数字滤波器,以提高系统性能和准确度。
结语数字滤波器作为数字信号处理的重要工具,具有广泛的应用前景和研究价值。

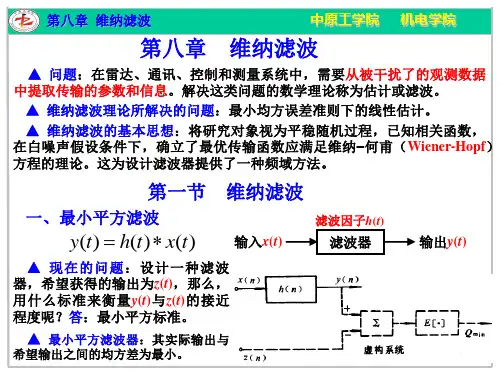
机械测试信号分析与处理THE ANALYSIS AND PROCESS OF MECHANIC TEST SIGNAL 第八章模拟滤波器设计讲授:谷立臣当输入滤波器的噪声和有用信号具有不同频带时,使噪声衰减或消除,并对信号中某些需要的成分传输而得到输出的滤波器为频率选择滤波器。
当噪声与有用信号的频带重叠时,使用频率选择滤波器不可能实现抑制噪声,得到需要的有用信号的目的,这时需要采用另一类广义滤波器,如维纳滤波、卡尔曼滤波等。
这一类滤波技术是从统计的概念出发,对所提取的有用信号从时域进行估计,在统计指标最优的意义下,估计出最优逼进的有用信号,噪声也在统计指标最优意义下得以衰减或消除。
模拟滤波器处理的输入、输出信号均为模拟信号,是一线性时不变模拟系统,它分成两类:由放大器、电阻R和电容C构成的有源滤波器及由R、C或和电感L构成的无源滤波器。
滤波器的工作原理:图1 低通滤波器的工作原理图中,输入电压ui(t)是一含高频信号噪声的信号,通过RC低通滤波器后,高频分量受到抑制得不到输出,只输出有用的且比较光滑的低频信号,滤波器这种选择特性是由它的频率响应特性所决定的低通滤波器的幅频和相频特性:由图可知,当时,取得相对较大的幅值,表明允许低频信号通过;而当时,值相对减小,高频信号衰减大,RC 网络不允许高频信号通过,被过滤掉。
由相频特性可知,通过的低频信号相对原输入信号有一定相移。
c Ω<Ω)(Ωj H c Ω>Ω)(Ωj H模拟滤波器系统框图:一般模拟滤波器系统如上图所示,是一线性非时变系统。
一般线性非移变离散系统的数学模型:8.3 滤波器设计基本理论8.3.1 信号通过线性系统无失真传输的条件信号无失真传输是指信号通过系统后,输出信号的幅度是输入信号的比例放大,出现的时间允许有一定的滞后,但没有波形上的畸变,如图8-5所示。
输入信号x(t)与输出信号y(t)之间的关系为(8-9))()(D t t Kx t y -=要使信号通过滤波器这样的线性系统传输不失真,就要求信号在全部频带上,系统的幅频特性|H(Ω)|为一常数,而相频特性φ(Ω)与频率成正比。
傅里叶数字滤波
傅里叶数字滤波是一种基于傅里叶变换的信号处理技术,用于去除信号中的噪声和干扰,提高信号的质量。
它是数字滤波中常用的方法之一,具有广泛的应用领域。
首先,傅里叶数字滤波的原理是基于傅里叶变换的频域分析。
通过将信号转换到频域,可以将噪声和信号分离开来。
然后,在频域中对信号进行滤波处理,去除噪声和干扰。
最后,再将滤波后的信号通过傅里叶逆变换转换回时域,得到经过滤波处理后的信号。
傅里叶数字滤波的优点在于它具有较高的滤波效果和较好的保留信号特征的能力。
通过选择合适的滤波器类型和参数,可以实现对信号的不同频率成分进行精确控制,滤波效果更加灵活可调。
在实际应用中,傅里叶数字滤波被广泛应用于音频和图像处理领域。
例如,在音频处理中,可以利用傅里叶数字滤波技术去除音频信号中的杂音和回声,提高音频的清晰度和音质。
在图像处理中,
可以利用傅里叶数字滤波技术去除图像中的噪点和伪像,增强图像的清晰度和细节。
总之,傅里叶数字滤波是一种强大的信号处理技术,可以有效地去除信号中的噪声和干扰,提高信号的质量。
它具有广泛的应用领域,并且可以根据需要进行灵活调整,满足不同场景下的信号处理需求。
通过合理应用傅里叶数字滤波技术,可以改善信号的质量,提高系统的性能和可靠性。
第8章读写器的体系结构物联网射频识别(RFID)技术与应用第8章读写器的体系结构点击此处结束放映物联网射频识别(RFID)技术与应用各种读写器虽然在工作频率、耦合方式、通信流程和数据传输方式等方面有很大的不同,但在组成和功能方面是十分类似的。
读写器的主要功能是将数据加密后发送给电子标签,并将电子标签返回的数据解密,然后传送给计算机网络。
点击此处结束放映8.38.28.48.1读写器的组成与设计要求高频读写器低频读写器微波读写器物联网射频识别(RFID)技术与应用点击此处结束放映8.1读写器的组成与设计要求物联网射频识别(RFID)技术与应用点击此处结束放映物联网射频识别(RFID)技术与应用8.1.1读写器的组成1.读写器的软件读写器的所有行为均由软件来控制完成。
软件向读写器发出读写命令,作为响应,读写器与电子标签之间就会建立起特定的通信。
点击此处结束放映物联网射频识别(RFID)技术与应用2.读写器的硬件读写器的硬件一般由天线、射频模块、控制模块和接口组成。
图8.1读写器的结构框图点击此处结束放映物联网射频识别(RFID)技术与应用(1)控制模块控制模块由ASIC组件和微处理器组成。
(2)射频模块射频模块主要由发送电路和接收电路构成。
(3)读写器的接口接口主要有RS-232、RS-485、RJ-45或WLAN。
(4)天线点击此处结束放映物联网射频识别(RFID)技术与应用8.1.2读写器的设计要求读写器在设计时需要考虑许多因素,包括基本功能、应用环境、电器性能和电路设计等。
点击此处结束放映物联网射频识别(RFID)技术与应用1.读写器的基本功能和应用环境(1)读写器是便携式还是固定式。
(2)支持一种还是多种类型电子标签的读写。
(3)读写器的读取距离和写入距离。
(4)读写器周边的电磁环境、温度、湿度和安全等环境。
点击此处结束放映物联网射频识别(RFID)技术与应用2.读写器的电气性能(1)空中接口的方式。
数字信号处理复习总结如果系统函数的分母中除a0外,还有其它的ak不为零,则相应的h(n)将是无限长序列,称这种系统为无限长单位脉冲响应(IIR,InfiniteImpulseResponse)系统。
(2)低通、高通、带通、带阻滤波器注意:数字滤波器(DF)与模拟滤波器(AF)的区别数字滤波器的频率响应都是以2π为周期的,滤波器的低通频带处于2π的整数倍处,而高频频带处于π的奇数倍附近。
2.设计指标描述滤波器的指标通常在频域给出。
数字滤波器的频率响应一般为复函数,通常表示为其中,称为幅频响应,称为相频响应。
对IIR数字滤波器,通常用幅频响应来描述设计指标,而对于线性相位特性的滤波器,一般用FIR滤波器设计实现。
IIR低通滤波器指标描述:——通带截止频率,——阻带截止频率,——通带最大衰减,——阻带最小衰减,——3dB通带截止频率3.设计方法(重点)三步:(1)按照实际需要确定滤波器的性能要求。
(2)用一个因果稳定的系统函数去逼近这个性能要求。
(3)用一个有限精度的算法去实现这个系统函数。
IIR滤波器常借助模拟滤波器理论来设计数字滤波器,(重点)设计步骤为:先根据所给的滤波器性能指标设计出相应的模拟滤波器传递函数Ha(s)( butterworth滤波器设计法等,有封闭公式利用),然后由Ha(s)经变换(脉冲响应不变法或者双线性变换法等)得到所需的数字滤波器的系统函数H(z)。
在变换中,一般要求所得到的数字滤波器频率响应应保留原模拟滤波器频率响应的主要特性。
为此要求:(重点)(1)因果稳定的模拟滤波器必须变成因果稳定的数字滤波器;(2)数字滤波器的频响应模仿模拟滤波器的频响。
6.2 脉冲响应不变法、双线性不变法设计IIR数字低通滤波器设计数字滤波器可以按照技术要求先设计一个模拟低通滤波器,得到模拟低通滤波器的传输函数,再按一定的转换关系将转换成数字低通滤波器的系统函数。
其设计流程如图所示6.1所示。
数字信号处理 实验八 调制解调系统的实现一、实验目的:(1) 深刻理解滤波器的设计指标及根据指标进行数字滤波器设计的过程 (2) 了解滤波器在通信系统中的应用 二、实验步骤:1.通过SYSTEMVIEW 软件设计与仿真工具,设计一个FIR 数字带通滤波器,预先给定截止频率和在截止频率上的幅度值, 通过软件设计完后,确认滤波器的阶数和系统函数,画出该滤波器的频率响应曲线,进行技术指标的验证。
建立一个两载波幅度调制与解调的通信系统,将该滤波器作为两个载波分别解调的关键部件,验证其带通的频率特性的有效性。
系统框图如下:规划整个系统,确定系统的采样频率、观测时间、细化并设计整个系统,仿真调整并不断改进达到正确调制、正确滤波、正确解调的目的。
(参考文件zhan3.svu )(1) 检查滤波器的波特图,看是否达到预定要求;(2) 检查幅度调制的波形以及相加后的信号的波形与频谱是否正常; (3) 检查解调后的的基带信号是否正常,分析波形变形的原因和解决措施; (4) 实验中必须体现带通滤波器的物理意义和在实际中的应用价值。
2.熟悉matlab 中的仿真系统;sin ω2基带信号13.将1.中设计的SYSTEMVIEW(如zhan3.svu)系统移植到matlab中的仿真环境中,使其达到相同的效果;4.或者不用仿真环境,编写程序实现该系统,并验证调制解调前后的信号是否一致。
程序与运行结果如下:n=1;f1=100;f2=300;fs=2000;%采样频率t=0:1/fs:n;fre=10;y1=square(2*fre*pi*t)/2+1.1;dt=1/fs;%定义时间步长n1=length(t);%样点个数f_end=1/dt;%频率轴的显示范围f=(0:n1-1)*f_end/n1-f_end/2;%频率自变量Xf1=dt*fftshift(fft(y1));%频谱figure(1);subplot(211);plot(t,y1);xlabel('t');title('方波时域图');subplot(212);plot(f,abs(Xf1));xlabel('f');title('方波幅度频谱');y2=square(2*fre*pi*t)/2+1.1;Xf2=dt*fftshift(fft(y2));z1=10*sin(2*pi*f1*t);z2=10*sin(2*pi*f2*t);figure(2);subplot(221);plot(t,z1);xlabel('t');title('100Hz正弦波时域图');subplot(222);plot(f,abs(dt*fftshift(fft(z1))));xlabel('f');title('100Hz正弦波幅度频谱');subplot(223);plot(t,z2);xlabel('t');title('300Hz正弦波时域图');subplot(224);plot(f,abs(dt*fftshift(fft(z2))));xlabel('f');title('300Hz正弦波幅度频谱');yy1=y1.*z1;%信号相乘yy2=y2.*z2;yy3=yy1+yy2;Xf3=dt*fftshift(fft(yy1));figure(3);subplot(211);plot(t,yy1);xlabel('t');title('调制信号1时域');subplot(212);plot(f,abs(Xf3));xlabel('f');title('调制信号1频谱');Xf4=dt*fftshift(fft(yy2));figure(4);subplot(211);plot(t,yy2);xlabel('t');title('调制信号2时域');subplot(212);plot(f,abs(Xf4));xlabel('f');title('调制信号2频谱');Xf5=dt*fftshift(fft(yy3));figure(5);subplot(211);plot(t,yy3);xlabel('t');title('调制信号1+2时域'); subplot(212);plot(f,abs(Xf5));xlabel('f');title('调制信号1+2频谱');fp1=100;fp2=200;%FIR滤波器100-200Hzfs1=50;fs2=250;As=15;Ws1=(fp1+fs1)/fs;Ws2=(fp2+fs2)/fs;w=(fp1-fs1)/fs;M=ceil((As-7.95)/(14.36*w));hamming=Hamming(M+1);b=fir1(M,[Ws1,Ws2],hamming);figure(6);freqz(b,1,fs,fs);title('FIR滤波器100-200Hz');t=0:1/fs:n;yyy1=filter(b,2,yy3);%信号1+2经过滤波器1zz1=filter(b,2,z1);%100Hz正弦波经过滤波器1Xf10=dt*fftshift(fft(yyy1));Xf11=dt*fftshift(fft(zz1));figure(7);subplot(211);plot(t,yyy1);xlabel('t');title('信号1+2滤波器1后时域图');subplot(212);plot(f,abs(Xf10));xlabel('f');title('信号1+2滤波器1后频谱');figure(8);subplot(211);plot(t,zz1);xlabel('t');title('100Hz正弦波滤波器1后时域图');subplot(212);plot(f,abs(zz1));xlabel('f');title('100Hz正弦波滤波器1后频谱');fp1=330;fp2=430;%FIR滤波器330-430Hzfs1=200;fs2=490;As=15;Ws1=(fp1+fs1)/fs;Ws2=(fp2+fs2)/fs;w=(fp1-fs1)/fs;M=ceil((As-7.95)/(14.36*w));hamming=Hamming(M+1);b=fir1(M,[Ws1,Ws2],hamming);figure(9);freqz(b,1,fs,fs);title('FIR滤波器330-430Hz');t=0:1/fs:n;yyy2=filter(b,2,yy3);zz2=filter(b,2,z2);Xf12=dt*fftshift(fft(yyy2));Xf13=dt*fftshift(fft(zz2));figure(10);subplot(211);plot(t,yyy2);xlabel('t');title('信号1+2滤波器2后时域图');subplot(212);plot(f,abs(Xf12));xlabel('f');title('信号1+2滤波器2后频谱');figure(11);subplot(211);plot(t,zz2);xlabel('t');title('300Hz正弦波滤波器2后时域图');subplot(212);plot(f,abs(zz2));xlabel('f');title('300Hz正弦波滤波器2后频谱');k1=yyy1.*zz1;%解调k2=yyy2.*zz2;figure(12);subplot(211);plot(t,k1);xlabel('t');title('解调信号1时域图');subplot(212);plot(f,abs(dt*fftshift(fft(k1))));xlabel('f');title('解调信号1频谱');figure(13);subplot(211);plot(t,k2);xlabel('t');title('解调信号2时域图');subplot(212);plot(f,abs(dt*fftshift(fft(k2))));xlabel('f');title('解调信号2频谱');N=8;%8阶巴特沃斯低通滤波器上限频率100HzWn=100/(fs/2);[b,a]=butter(N,Wn,'low');kk1=filter(b,a,k1);figure(14);[H,W]=freqz(b,a);%返回频率响应subplot(211);plot(W*fs/(2*pi),abs(H));xlabel('频率Hz');ylabel('幅值');grid on; subplot(212);plot(W*fs/(2*pi),20*log10(abs(H)));xlabel('频率Hz');ylabel('幅值dB');grid on;kk2=filter(b,a,k2);Xf6=dt*fftshift(fft(kk1));figure(15);subplot(211);plot(t,kk1);xlabel('t');title('解调信号1经滤波时域'); subplot(212);plot(f,abs(Xf6));xlabel('f');title('解调信号1经滤波频谱');Xf7=dt*fftshift(fft(kk2));figure(16);subplot(211);plot(t,kk2);xlabel('t');title('解调信号2经滤波时域'); subplot(212);plot(f,abs(Xf7));xlabel('f');title('解调信号2经滤波频谱');。