大工17春《自动控制原理》在线作业2 00
- 格式:doc
- 大小:23.50 KB
- 文档页数:3

西工大17春《操纵工程基础》在线作业一、单项选择题(共 32 道试题,共 80 分。
)1. 实轴上根轨迹区段()侧的开环实数零、极点数之和应为奇数。
A. 前B. 后C. 左D. 右2. 系统的稳固性只与闭环()点位置有关。
A. 原点B. 极点C. 零点D. 始点3. 放大环节的频率特性与ω无关,其幅相频率特性图是实轴上的一个点,对数幅频特性图是()横坐标轴的等分贝线。
A. 垂直于B. 平行于C. 相交于D. 不确信4. 关于理想继电特性,在正弦信号输入时,其输出是一个与输入正弦函数同频率的()。
A. 周期正弦波B. 周期余弦波C. 周期方波D. 不确信5. 非线性系统方程为,那么系统的平稳点是()。
A. 1,2B. 1,4C. 0,2D. 0,46. 单位阶跃函数的拉氏变换式等于()。
A. 1/sB. sC. s2D. 1/s27. 加大系统的带宽能够使系统反映速度(),但减弱了系统抗干扰的能力。
A. 减慢B. 加速C. 维持不变D. 不确信8. 若是根轨迹与虚轴相交,表示系统闭环特点方程式中含有纯虚根,系统处于()状态。
A. 相对稳固B. 临界稳固C. 衰减周期D. 增强周期9. 稳固环节相角的绝对值()不稳固环节相角的绝对值。
A. 大于B. 小于C. 等于D. 不确信10. 增加系统前向通路中积分环节的数量,能够使系统类型(),能够排除不同给定输入信号作用下的稳态误差。
A. 维持B. 降低C. 提高D. 不确信11. 描述函数是对非线性特性在()信号作用下的输出进行谐波线性化处置所取得的近似描述。
A. 正切B. 余切C. 正弦D. 余弦12. 串联迟后校正的作用要紧在于(),从而改善系统的稳态性能。
A. 提高系统的开环放大系数B. 使系统的带宽变窄C. 输入信号的快速性降低D. 提高系统的截止频率13. 零点减小系统的阻尼,使峰值时刻(),超调量增大。
A. 提早B. 推后C. 维持不变D. 不确信14. 单位脉冲函数的拉氏变换式等于()。
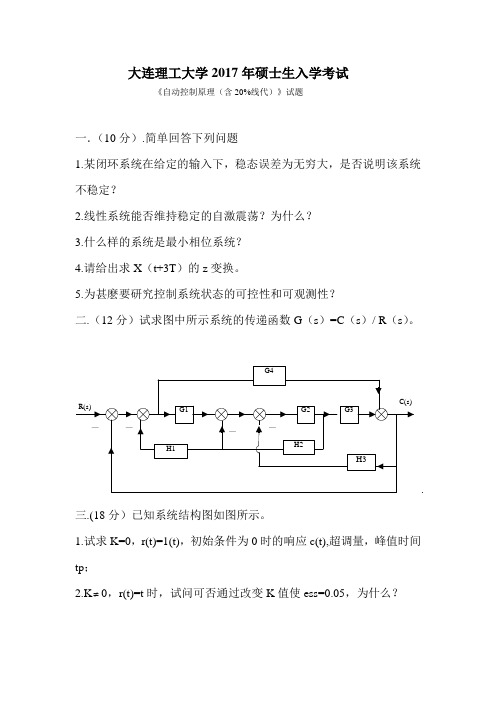
大连理工大学2017年硕士生入学考试《自动控制原理(含20%线代)》试题一.(10分).简单回答下列问题1.某闭环系统在给定的输入下,稳态误差为无穷大,是否说明该系统不稳定?2.线性系统能否维持稳定的自激震荡?为什么?3.什么样的系统是最小相位系统?4.请给出求X (t+3T )的z 变换。
5.为甚麽要研究控制系统状态的可控性和可观测性?二.(12分)试求图中所示系统的传递函数G (s )=C (s )/ R (s )。
G1G2G3R(s)C(s)G4H1H2H3H3————.三.(18分)已知系统结构图如图所示。
1.试求K=0,r(t)=1(t),初始条件为0时的响应c(t),超调量,峰值时间tp ;2.K 0,r(t)=t 时,试问可否通过改变K 值使ess=0.05,为什么?k sCR222++s s s 四.(20分)某负反馈系统的开环传递函数G(s)H(s)=)3)(2)(1(+++s s s K;1.试绘制以K 为参量的根轨迹,并确定系统处于过阻尼状态时K 的范围?2.试判断-1+j 是否在根轨迹上?五.(15)某负反馈系统的开环传递函数为G(s)H(s)=)1()1(10+-s s s 。
试绘制系统的对数坐标曲线,并求相角裕度。
六.(15分)某负反馈系统的开环传递函数为)1()10()()(2++=s s s s H s G 。
1.试绘制完整的开环频率特性的幅相特性曲线以及相应的S 平面上的封闭曲线。
2.使用奈奎斯特判据判断系统的稳定性。
七.给定系统的微分方程为02=-++x x x x ,试确定奇点的位置和类型,并绘制相平面草图。
八.(15分)离散系统如图3所示。
图中Gh(S)为零阶保持器,采样周期T=1秒,当输入r(t)=1(t)时,要求输入C(t)=1(t-T),试确定D (z ),并求稳态误差(e=r-c )。
)(z D R(t)T—Gh(s)11+s TC (t )九.(12分)系统微分方程为:u u y y y+=++ 23, 1. 试建立系统状态空间的约当标准型; 2. 试绘制系统的状态变量图。

自动控制原理大作业,D O C(总8页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除恒温箱自动控制系统的分析与实现(北京通大学机械与电子控制工程学院,北京 100044)摘要:本文的主要内容是对恒温箱自动控制系统结构图进行分析,画出结构框图,算出传递函数。
在对恒温箱自动控制系统仿真的基础上,在控制器选择,执行机构选型,对象的建模与时域和频域分析等方面进行全面、综合的分析,并对其进行频域校正,针对系统存在的问题找到合适的解决办法,构建校正网络电路,从而使得系统能够满足要求的性能指标。
关键词:增益系统传递函数频域分析频域校正Constant temperature box automatic control system analysis andImplementationZhang Xinjie,Jia Chengcheng,Xian Zhuo,Zhou Jing,Shi Zhen (School of Mechanical, Electronic and Control engineering, Beijing Jiaotong University, Beijing 100044,China)Abstract:The system is mainly to solve the problem of constant temperature box automatic control system structure diagram analysis, draw the structure diagram, calculate the transfer function. In the constant temperature box automatic control system based on the simulation, in the controller, actuator selection, object modeling and analysis of time domain and frequency domain and other aspects of a comprehensive, integrated analysis, and carries on the frequency domain correction system, aiming at the existing problems to find a suitable solution, constructing a calibration network circuit, thereby enabling the system to to meet the requirements of performance index.Key words: gain transfer function of the system frequency domain analysis frequency domain correction1 工作原理及性能要求恒温箱自动控制系统的工作原理图如图1所示。

17春北交《自动控制理论》在线作业二北交《自动控制理论》在线作业二一、单选题(共5题,总分10分)1.通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为()。
a.比较元件b.给定元件c.反馈元件d.放大元件正确答案:2.单位脉冲函数的拉普拉斯变换等于()。
a、 1b。
2c。
3d。
四正确答案:3.闭环控制系统也称为()。
a、反馈系统B.前馈系统C.串联系统D.并联系统正确答案:4.把系统的开环频率特性画在()上可以求得闭环频率特性。
a.等m圆图b.系统图c.伯德图d.结构图正确答案:5.超前校正是由于正相移,使截止频率附近的()显著上升,因此具有较大的稳定裕度。
a、相位B.角度C.振幅D.获得正确答案:北交《自动控制理论》在线作业二二、多项选择题(共5题,共15分)1.消除系统结构不稳定的措施有()。
a.改变积分性质b、引入比例微分控制C.改变微分方程的性质d.引入比例-积分控制正确答案:2.根据提供的相位角,串联校正可分为()种。
a、超前校正B.滞后校正c.超前-滞后校正d.滞后-超前校正正确答案:3.动态结构图由以下符号组成。
(a)信号线B.分支点C.添加点D.方框正确答案:4.以下环节哪些()为控制系统的典型环境。
a.比例环节b.积分环节c.微分环节d.惯性环节正确答案:5.根据系统中的连接方式,校正元件可分为:。
(a)系列校正B.反馈校正C.预校正D.干扰补偿正确答案:北交《自动控制理论》在线作业二三、判断题(共25题,总分75分)1.串联滞后校正用于改善系统的稳态性能,而且还可以基本保持系统原来的暂态性能。
()a.错误b.正确正确答案:2.在开环对数频率特性的频带内,低频段决定了系统的稳定性和快速性。
(a) B.正确答案:3.利用根轨迹法,能方便地确定高阶系统中某个参数变化闭环极点分布的规律,形象地看出参数对系统动态过程的影响。
()a.错误b.正确正确答案:4.图解法特别适用于解析法无法求解的二阶非线性系统。

大工14春《自动控制原理》在线作业2
单选题判断题
一、单选题(共10 道试题,共60 分。
)
1. 实轴上属于根轨迹的部分,其右边开环零、极点的个数之和为()。
A. 奇数
B. 偶数
C. 零
D. 正数
-----------------选择:A
2. 一阶滞后环节指的是()。
A. 比例环节
B. 惯性环节
C. 积分环节
D. 振荡环节
-----------------选择:B
3. ()与传递函数一样,都表征了系统的内在规律。
A. 幅频特性
B. 相频特性
C. 根轨迹
D. 频率特性
-----------------选择:D
4. ()是绘制根轨迹的依据。
A. 辐角条件
B. 幅值条件
C. 开环增益
D. 开环零点
-----------------选择:A
5. 根轨迹的分支数等于特征方程的阶次,即()。
A. 开环零点数m
B. 开环极点数n
C. 开环零点数m和开环极点数n中的较大者
D. 开环零点数m和开环极点数n中的较小者
-----------------选择:C
6. 比例环节的相频特性为()。
A. 0°
B. 60°
C. 90°
D. 180°
-----------------选择:A
7. 根轨迹是指当系统开环传递函数中某一参数()时,闭环特征方程式的根在s平面上运动。
一、单项选择题(共 10 道试题,共 50 分。
) V 1. 齿轮传动间隙的调整方式包括()。
A. 偏心调整法B. 轴向垫片调整法C. 双片薄齿轮错齿调整法D. 以上选项都对2. 转动导轨结构()。
A. 简单B. 复杂C. 以上选项都对D. 以上选项都不对3. 常见的导轨截面形状,包括()。
A. 三角形B. 矩形C. 燕尾形D. 以上选项都对4. 蜗形凸轮传动机构装配()。
A. 方便B. 复杂C. 以上选项都对D. 以上选项都不对5. ()能够提高导轨副耐磨性。
A. 镶装导轨B. 提高导轨的精度与改善表面粗糙C. 减小导轨单位面积上的压力(即比压)D. 以上选项都对6. 滚珠丝杠副支承方式中,()的轴向刚度最低。
A. 单推-单推式B. 双推-双推式C. 双推-简支式D. 双推-自由式7. 为了避免爬行现象的显现,能够采取()方法。
A. 采纳转动导轨B. 在一般滑动导轨上利用含有极性添加剂的导轨油C. 减小结合面D. 以上选项都对8. 滚珠丝杠副轴向间隙的调整预紧方式中,双螺母螺纹预紧调整式()精准定量地进行调整。
B. 不能C. 以上选项都对D. 以上选项都不对9. 谐波齿轮传动精度()。
A. 低B. 高C. 以上选项都对D. 以上选项都不对10. 内循环方式的滚珠循环流畅性()。
A. 差B. 好C. 以上选项都对D. 以上选项都不对二、判定题(共 10 道试题,共 50 分。
) V 1. 蜗形凸轮传动机构本钱很低。
A. 错误B. 正确2. 三角形导轨的导向精度较高。
A. 错误B. 正确3. 滚珠丝杠副轴向间隙的调整预紧方式中,双螺母垫片调整预紧式在利用中调整不方便。
A. 错误B. 正确4. 谐波齿轮传动的结构比较复杂。
A. 错误B. 正确5. 内循环方式的滚珠在循环进程中始终与丝杠表面维持接触。
A. 错误B. 正确6. 轴系的振动表现为强迫振动和自激振动两种形式。
A. 错误B. 正确7. 转动导轨的抗振性比较好。
自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EΘrUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
3 某RC 电路网络原理图如图所示,电压()i u t 为输入量,()o u t 为输出量,试画出其方块图,并求其传递函数。
大工17春《自动控制原理》在线作业2试卷总分:100 得分:100一、单选题(共10 道试题,共60 分)1. PID调节器中的D指的是()。
A. 比例B. 积分C. 微分D. 比例积分满分:6 分正确答案:C2. 在分析中常将同频率下输出信号相位与输入信号相位之差称为()。
A. 相位差B. 信号差C. 频率差D. 相差满分:6 分正确答案:A3. 一阶滞后环节的最大滞后相角为()。
A. 0°B. 60°C. 90°D. 180°满分:6 分正确答案:C4. ()是相位滞后环节,它的低通性能好。
A. 比例环节B. 微分环节C. 积分环节D. 振荡环节满分:6 分正确答案:C5. 用直接求解闭环特征根绘制根轨迹的办法,对于()是不适用的。
A. 一阶系统B. 二阶系统C. 三阶系统D. 高阶系统满分:6 分正确答案6. 当根轨迹分支在实轴上某点相遇又向复平面运动时,该交点称为根轨迹的()。
A. 会合点B. 分离点C. 相遇点D. 分离极点满分:6 分正确答案:B7. 如果开环零点数目m小于开环极点数目n,则有()条根轨迹终止于无穷远处。
A. nB. mC. n-mD. m-n满分:6 分正确答案:C8. ()是用来确定根轨迹上某点的相应增益值。
A. 辐角条件B. 幅值条件C. 开环增益D. 开环零点满分:6 分正确答案:B9. ()的对数相频特性恒为0°。
A. 比例环节B. 惯性环节C. 积分环节D. 振荡环节满分:6 分正确答案:A10. 为了减少校正装置的输出功率,以降低成本和功耗,()装置通常被安置在前向通道的前端。
A. 串联校正B. 反馈校正C. 并联校正D. 前馈校正满分:6 分正确答案:A二、判断题(共10 道试题,共40 分)1. 以开环根轨迹增益为可变参数绘制的根轨迹称做参变量根轨迹。
A. 错误B. 正确满分:4 分正确答案:A2. 利用超前网络进行串联校正的基本原理是利用其相角的超前特性。
大工17春《自动控制原理》在线作业2
一、单选题(共10 道试题,共60 分。
)
1. PID调节器中的D指的是()。
A. 比例
B. 积分
C. 微分
D. 比例积分
正确答案:C
2. 在分析中常将同频率下输出信号相位与输入信号相位之差称为()。
A. 相位差
B. 信号差
C. 频率差
D. 相差
正确答案:A
3. 一阶滞后环节的最大滞后相角为()。
A. 0°
B. 60°
C. 90°
D. 180°
正确答案:C
4. ()是相位滞后环节,它的低通性能好。
A. 比例环节
B. 微分环节
C. 积分环节
D. 振荡环节
正确答案:C
5. 用直接求解闭环特征根绘制根轨迹的办法,对于()是不适用的。
A. 一阶系统
B. 二阶系统
C. 三阶系统
D. 高阶系统
正确答案:D
6. 当根轨迹分支在实轴上某点相遇又向复平面运动时,该交点称为根轨迹的()。
A. 会合点
B. 分离点
C. 相遇点
D. 分离极点。