机械结构有限元法与计算机辅助分析课后习题参考答案
- 格式:pdf
- 大小:3.29 MB
- 文档页数:17
机械有限元习题答案——哈⼯⼤第⼆章习题2.1 解释如下的概念:应⼒、应变,⼏何⽅程、物理⽅程、虚位移原理。
解○1应⼒是某截⾯上的应⼒在该处的集度。
○2 应变是指单元体在某⼀个⽅向上有⼀个ΔU 的伸长量,其相对变化量就是应变。
X U Xx ??=ε表⽰在x 轴的⽅向上的正应变,其包括正应变和剪应变。
○3⼏何⽅程是表⽰弹性体内节点的应变分量与位移分量之间的关系,其完整表⽰如下:Txz yz xy z y x x w z u zv y w y u x v z w y vx u x w z u z v y w y u x v z w y v x u ??+++=+????+????+?=??????=γγγεεεε○4物理⽅程:表⽰应⼒和应变关系的⽅程某⼀点应⼒分量与应变分量之间的关系如下:=???????????????????=666564636261565554535251464545434241363534333231262524232221161514131211αααααααααααααααααααααααααααααααααααατττσσσσxz yz xy z y xxz yz xy zz yy xx γγγεεε○5虚位移原理:在弹性有⼀虚位移情况下,由于作⽤在每个质点上的⼒系,在相应的虚位移上虚功总和为零,即为:若弹性体在已知的⾯⼒和体⼒的作⽤下处于平衡状态,那么使弹性体产⽣虚位移,所有作⽤在弹性体上的体⼒在虚位移上所做的⼯就等于弹性体所具有的虚位能。
2.2说明弹性体⼒学中的⼏个基本假设。
○1 连续性假设:就是假定整个物体的体积都被组成该物体的介质所填满,不存在任何间隙。
○2 完全弹性假设:就是假定物体服从虎克定律。
○3 各向同性假设:就是假定整个物体是由同意材料组成的。
○4 ⼩变形和⼩位移假设:就是指物体各点的位移都远远⼩于物体原来的尺⼨,并且其应变和转⾓都⼩于1。
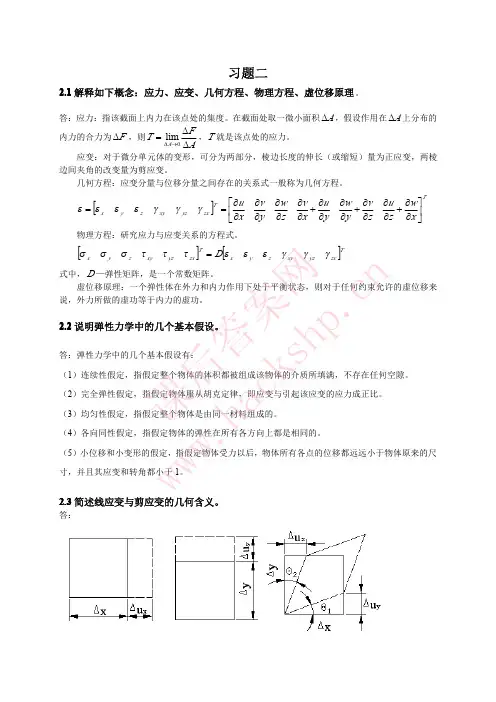
2.3简述线应变与剪应变的⼏何含义。
2 弹性力学问题的有限单元法思考题2.1 有限元法离散结构时为什么要在应力变化复杂的地方采用较密网格,而在其他地方采用较稀疏网格?答:在应力变化复杂的地方每一结点与相邻结点的应力都变化较大,若网格划分较稀疏,则在应力突变处没有设置结点,而使得所求解的误差很大,若网格划分较密时,则应力变化复杂的地方可以设置更多的结点,从而使得所求解的精度更高一些。
2.2 因为应力边界条件就是边界上的平衡方程,所以引用虚功原理必然满足应力边界条件,对吗?答:对。
2.3 为什么有限元只能求解位移边值问题和混合边值问题?弹性力学中受内压和外压作用的圆环能用有限元方法求解吗?为什么?答:有限元法是一种位移解法,故只能求解位移边值问题和混合边值问题。
而应力边值问题没有确定的位移约束,不能用位移法求解,所以也不能用有限元法求解。
2.4 矩形单元旋转一个角度后还能够保持在单元边界上的位移协调吗?答:能。
矩形单元的插值函数满足单元内部和单元边界上的连续性要求,是一个协调元。
矩形的插值函数只与坐标差有关,旋转一个角度后各个结点的坐标差保持不变,所以插值函数保持不变。
因此矩形单元旋转一个角度后还能够保持在单元边界上的位移协调。
2.5 总体刚度矩阵呈带状分布,与哪些因素有关?如何计算半带宽? 答:因素:总体刚度矩阵呈带状分布与单元内最大结点号与最小结点号的差有关。
计算:设半带宽为B ,每个结点的自由度为n ,各单元中结点整体码的最大差值为D ,则B=n(D+1),在平面问题中n=2。
2.6 为什么单元尺寸不要相差太大,如果这样,会导致什么结果? 答:由于实际工程是一个二维或三维的连续体,将其分为具有简单而规则的几何单元,这样便于网格计算,还可以通过增加结点数提高单元精度。
在几何形状上等于或近似与原来形状,减小由于形状差异过大带来的误差。
若形状相差过大,使结构应力分析困难加大,误差同时也加大。
2.7 剖分网格时,在边界出现突变和有集中力作用的地方要设置结点或单元边界,试说明理由。
《计算机辅助工程分析》试题答案一填空题1 弹性力学是研究可变形固体在温度变化和边界约束等作用下的弹性变形与应力状态的科学。
2 在弹性力学课程中一般做四个基本假定为连续性假定,均匀性假定,各向同性假定,小变形假定。
3 在弹性力学中四个最基本方程为平衡方程,几何方程,本构方程,变形协调方程。
4 CAE的技术种类包括有限元法,边界元法,有限差分法。
5 ANSYS有限元典型分析大致分为三个步骤为建立有限元模型,加载和求解,结果后处理和结果查看。
6 ANSYS将载荷分为六类,分别为自由度约束,集中力载荷,面载荷,体载荷,惯性载荷,耦合场载荷。
7 ANSYS提供的坐标系有总体坐标系,局部坐标系,节点坐标系,单元坐标系,显示坐标系,结果坐标系六种坐标系统。
8 网格划分方法有自由网格划分,映射网格划分两种。
9 ANSYS后处理器包括两个模块通用后处理器,时间历程后处理器。
10 常用的分析类型选项有Static(静态),Harmonic(谐态),Transient(瞬态)。
二选择题1以下哪个为主菜单命令( a )a)Element Type; b)File; c)Select; d)list2映射网格划分面对象时,所用单元必须全部是哪些单元( a b )a)三角形单元;b)四边形单元;c)五边形单元;d)六边形单元3ANSYS有哪两种模型( c d )a)点;b)线;c)实体模型;d)有限元模型4 ANSYS实体建模有哪两种( b c )a)自左向右;b)自底而上;c)自顶而下;d)自右向左5 用自底向上的方法构造模型时,首先定义的是( a )对象:a)关键点;b)线;c)面;d)体6 一般的交运算有哪些类型交运算( a b c )a)线与线的交;b)面与面的交;c)体与体的交;d)点与点的交7 常用的单元属性包括哪些内容( a b c d )a)单元类型;b)单元实常数;c)材料属性;d)单元坐标系8 ANSYS将智能网格划分水平分为10级,默认水平级别是( d )a)1; b)10; c)8; d)69 交迭运算有哪些类型( a b c )a)体与体之间的交迭运算;b) 面与面之间的交迭运算;c) 线与线之间的交迭运算;d) 点与点之间的交迭运算10 退出ANSYS的方法有( a b c d )a)在工具栏中单击Quit;b)在实用菜单中退出File Exit;c)在命令输入窗口输入Exit;d)直接单击主界面右上角的×按钮三简答题1 CAE和有限单元法的定义是什么?答:计算机辅助工程分析技术(CAE)是利用计算机对工程设计中所涉及的各种学科问题进行数值仿真分析的一种现代技术,是运用有限单元法对产品的结构或其他机械系统的力学性能进行分析的技术。
第一章概述1. CAD、CAPP、CAM 技术各具有哪些功能?为什么要进行CAD/CAM 技术的集成?2. 分析应用CAD/CAM 系统进行产品开发设计的作业过程及其特征。
3. 简述CAD/CAM 系统硬件的组成,并分析各自在系统中的作用。
4. 简述CAD/CAM 系统软件的组成,并分析各自在系统中的作用。
5. 概述CAD/CAM 技术的发展过程及其应用领域。
6. 分析CAD/CAM 技术的未来发展趋势。
第二章CAD/CAM 支撑技术1. 阐述数据结构的概念。
何谓数据的逻辑结构?何谓存储结构?2. 阐述栈与队列数据结构的概念及其特点。
3. 简述数据的文件管理与数据库管理的区别。
4. 何谓层次模型、网状模型和关系模型数据库?为什么当前所使用的数据库系统大多为关系型数据库?5. 什么是工程数据库?与一般商用数据库比较,工程数据库有哪些特点?6. 什么是产品数据管理(PDM)?它有哪些功能作用?并说明PDM 的实施对CAD/CAM 系统集成的意义和作用。
7. 简述计算机局域网的组成和常用的拓扑结构。
8. 阐述常用的网络CAD/CAM 系统结构模式和作业原理。
9. 描述可视化技术的含义及其基本流程。
10. 常用的知识表示方法有哪些?分别阐述产生式表示法和框架表示法是如何进行知识表示的。
11. 什么是正向推理?什么是反向推理?各自有何特点?12. 专家系统的基本组成有哪几部分?各部分的功能作用如何?简要描述专家系统的工作原理。
第三章数据处理技术1. 在CAD/CAM 作业中如何对数表和线图进行计算机处理?2. 分析函数插值与函数拟合的不同点和共同点。
第四章图形处理技术1. 何为窗口?何为视区?如何将窗口内的图形在视区内显示?2. 闸述Cohen-Sutherland 直线段的剪裁方法与处理步骤。
3. 描述多边形剪裁的基本思想。
4. 有一任意平面直线段,试求将之变换到与X 轴重合的复合变换矩阵。
5. 分析计算机辅助绘图的各种方式特点以及应用场合。
有限元课后习题答案1.1有限元法的基本思想和基本步骤是什么首先,将表示结构的连续离散为若干个子域,单元之间通过其边界上的节点连接成组合体。
其次,用每个单元内所假设的近似函数分片地表示求解域内待求的未知厂变量。
步骤:结构的离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移。
1.2有限元法有哪些优点和缺点优点:有限元法可以模拟各种几何形状复杂的结构,得出其近似解;通过计算机程序,可以广泛地应用于各种场合;可以从其他CAD软件中导入建好的模型;数学处理比较方便,对复杂形状的结构也能适用;有限元法和优化设计方法相结合,以便发挥各自的优点。
缺点:有限元计算,尤其是复杂问题的分析计算,所耗费的计算时间、内存和磁盘空间等计算资源是相当惊人的。
对无限求解域问题没有较好的处理办法。
1.3有限元法在机械工程中有哪些具体的应用静力学分析模态分析动力学分析热应力分析其他分析2.1杆件结构划分单元的原则是什么?1)杆件的交点一定要取为节点2)阶梯形杆截面变化处一定要取为节点3)支撑点和自由端要取为节点4)集中载荷作用处要取为节点5)欲求位移的点要取为节点6)单元长度不要相差太多2.2简述单元刚度矩阵的性质。
单元刚度矩阵是描述单元节点力与节点位移之间关系的矩阵。
2.3有限元法基本方程中每一项的意义是什么?{Q}---整个结构的节点载荷列阵(包括外载荷、约束力);{}---整个结构的节点位移列阵;[K]---结构的整体刚度矩阵,又称总刚度矩阵。
2.4简述整体刚度矩阵的性质和特点。
对称性奇异性稀疏性主对角上的元素恒为正2.5位移边界条件和载荷边界条件的意义是什么由于刚度矩阵的线性相关性不能得到解,从而引入边界条件。
2.6写出平面刚架问题中单元刚度矩阵的坐标变换式2.7推导平面刚架局部坐标系下的单元刚度矩阵。
2.8简述整体坐标的概念。
单元刚度矩阵的坐标变换式把平面刚架的所有单元在局部坐标系X’O’Y’下的单元刚度矩阵变换到一个统一的坐标系xOy下,这个统一的坐标系xOy称为整体坐标系。
1、单项CAD、CAPP、CAM技术各具有哪些功能?为什么要进行CAD/CAM技术的集成?集成的CAD/CAM系统会带来哪些优越性?CAD系统具有几何建模、工程分析、模拟仿真、工程绘图等主要功能;CAPP系统的功能包括毛坯设计、加工方法选择、工序设计、工艺路线制定和工时定额计算等;广义CAM,是指利用计算机辅助完成从毛坯到产品制造过程中的直接和间接的各种活动;狭义CAM,是指数控程序的编制;这些各自独立的系统相互割裂,不能实现系统之间信息的自动传递和转换,大量的信息资源得不到充分地利用和共享。
只有当CAD系统一次性输入的信息能为后续的生产制造环节(如CAD/CAPP/CAM等)直接应用才能取得最大的经济效益。
集成化的CAD/CAM系统借助于工程数据库技术、网络通信技术以及标准格式的产品数据交换接口技术,把分散于机型各异的各个CAD、CAPP和CAM各功能模块高效快捷地集成起来,实现软、硬件资源的共享,保证整个系统内的信息流畅通无阻。
2、分析应用CAD/CAM系统进行产品开发设计的作业过程及其特征。
作业过程----(1)创意与构思;(2)计算机辅助设计与分析;(3)快速原型制造;(4)计算机辅助工艺规划;(5)计算机辅助编程;(6)虚拟制造。
特征----------(1)产品开发设计数字化;(2)设计环境的网络化;(3)设计过程的并行化;(4)新型开发工具和手段的应用。
4、叙述CAD/CAM系统软件组成结构中的系统软件、支撑软件以及应用软件各自的功能作用以及相互间的联系与区别。
①系统软件主要用于计算机的运行、管理、维护和控制,以及对各类计算机语言程序的编译和执行②支撑软件分为单一功能型支撑软件和综合集成支撑软件③应用软件是在系统软件和支撑软件基础上,针对某一具体应用开发的软件,如机床设计、夹具设计、汽车车身设计等CAD或CAE软件系统。
6、试分析CAD/CAM技术的发展趋势。
答:CAD/CAM技术经历五十多年的发展历程,现已成为一种应用广泛的高新技术,并产生了巨大的生产力,有力地推动着制造业的技术进步和产业发展。
第一章1.通过计算机辅助工程设计和分析,可以缩短机械产品的设计周期,节省设计费用。
()答案:对2.一维杆单元的变形特征类似于弹簧,其弹簧刚度k是()。
答案:EA/L3.CAE的技术种类有:()。
答案:边界元法();有限元法();有限差分法4.广义来讲,CAE就是有关产品设计、制造、工程分析、仿真、实验及信息分析处理,以及相应数据库和数据库管理系统在内的计算机辅助设计和生产的综合系统。
()答案:对5.有限元是近似求解一般连续域问题的数值方法。
()答案:对第二章1.ANSYS主要用于结构的静力学分析,不能进行多物理场分析。
()答案:错2.CAE仿真分析最重要的是建模和网格划分。
()答案:错3.采用单位制mm-t-s建模时,密度为7850kg/m3在分析中应输入密度的数值为()答案:7.85e-94.采用单位制m-kg-s建模时,材料弹性模量为2e5MPa在分析中应输入弹性模量的数值为()答案:2e115.单元是由节点构成的,一个单元可以包含1个或多个节点。
()答案:对第三章1.ANSYS中创建圆弧倒角线,可通过下述哪一种操作路径实现?()答案:Preprocessor>Modelling>Create>Line>Line fillet2.删除面时,只删除指定的面,保留这个面所包含的低阶图元,应采取的操作路径是()。
答案:Main Menu>Preprocessor>Modeling>Delete>AreasOnly3.实体建模中的基本图元有()。
答案:线;关键点;体;面4.建立实体模型时,关键点是最小的图元对象。
()答案:对5.在ANSYS中,选择“线”的GUI操作是:Utility Menu |Select |Entities命令,弹出实体选择对话框,在选择对象下拉列表中选择Lines选项即可。
()答案:对第四章1.在后处理中,第一步是将数据结果读入数据库当中,执行的菜单路径是()。
答案:Utility Menu>File>Resume Jobname.db2.时间后处理Post26可用于检查什么?()。
平面机构的自由度和速度分析一、复习思考题1、什么是运动副?运动副的作用是什么?什么是高副?什么是低副?2、平面机构中的低副和高副各引入几个约束?3、机构自由度数和原动件数之间具有什么关系?4、用机构运动简图表示你家中的缝纫机的踏板机构。
5、计算平面机构自由度时,应注意什么问题?二、填空题1、运动副是指能使两构件之间既保持接触。
而又能产生一定形式相对运动的。
2、由于组成运动副中两构件之间的形式不同,运动副分为高副和低副。
3、运动副的两构件之间,接触形式有接触,接触和接触三种。
4、两构件之间作接触的运动副,叫低副。
5、两构件之间作或接触的运动副,叫高副。
6、回转副的两构件之间,在接触处只允许孔的轴心线作相对转动。
7、移动副的两构件之间,在接触处只允许按方向作相对移动。
8、带动其他构件的构件,叫原动件。
9、在原动件的带动下,作运动的构件,叫从动件。
10、低副的优点:制造和维修,单位面积压力,承载能力。
11、低副的缺点:由于是摩擦,摩擦损失比大,效率。
12、暖水瓶螺旋瓶盖的旋紧或旋开,是低副中的副在接触处的复合运动。
13、房门的开关运动,是副在接触处所允许的相对转动。
14、抽屉的拉出或推进运动,是副在接触处所允许的相对移动。
15、火车车轮在铁轨上的滚动,属于副。
三、判断题1、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()2、凡两构件直接接触,而又相互联接的都叫运动副。
()3、运动副是联接,联接也是运动副。
()4、运动副的作用,是用来限制或约束构件的自由运动的。
()5、螺栓联接是螺旋副。
()6、两构件通过内表面和外表面直接接触而组成的低副,都是回转副。
()7、组成移动副的两构件之间的接触形式,只有平面接触。
()8、两构件通过内,外表面接触,可以组成回转副,也可以组成移动副。
()9、运动副中,两构件联接形式有点、线和面三种。
()10、由于两构件间的联接形式不同,运动副分为低副和高副。
2 弹性力学问题的有限单元法思考题2.1 有限元法离散结构时为什么要在应力变化复杂的地方采用较密网格,而在其他地方采用较稀疏网格?答:在应力变化复杂的地方每一结点与相邻结点的应力都变化较大,若网格划分较稀疏,则在应力突变处没有设置结点,而使得所求解的误差很大,若网格划分较密时,则应力变化复杂的地方可以设置更多的结点,从而使得所求解的精度更高一些。
2.2 因为应力边界条件就是边界上的平衡方程,所以引用虚功原理必然满足应力边界条件,对吗?答:对。
2.3 为什么有限元只能求解位移边值问题和混合边值问题?弹性力学中受内压和外压作用的圆环能用有限元方法求解吗?为什么?答:有限元法是一种位移解法,故只能求解位移边值问题和混合边值问题。
而应力边值问题没有确定的位移约束,不能用位移法求解,所以也不能用有限元法求解。
2.4 矩形单元旋转一个角度后还能够保持在单元边界上的位移协调吗?答:能。
矩形单元的插值函数满足单元内部和单元边界上的连续性要求,是一个协调元。
矩形的插值函数只与坐标差有关,旋转一个角度后各个结点的坐标差保持不变,所以插值函数保持不变。
因此矩形单元旋转一个角度后还能够保持在单元边界上的位移协调。
2.5 总体刚度矩阵呈带状分布,与哪些因素有关?如何计算半带宽? 答:因素:总体刚度矩阵呈带状分布与单元内最大结点号与最小结点号的差有关。
计算:设半带宽为B ,每个结点的自由度为n ,各单元中结点整体码的最大差值为D ,则B=n(D+1),在平面问题中n=2。
2.6 为什么单元尺寸不要相差太大,如果这样,会导致什么结果? 答:由于实际工程是一个二维或三维的连续体,将其分为具有简单而规则的几何单元,这样便于网格计算,还可以通过增加结点数提高单元精度。
在几何形状上等于或近似与原来形状,减小由于形状差异过大带来的误差。
若形状相差过大,使结构应力分析困难加大,误差同时也加大。
2.7 剖分网格时,在边界出现突变和有集中力作用的地方要设置结点或单元边界,试说明理由。
2023《有限元技术》习题一参考答案1、用欧拉方程求泛函()1022[()]'2(0)0,(1)0J y x y y xy dx y y ⎧=--⎪⎨⎪==⎩⎰的极值曲线。
解:22'2F y y xy =--,代入欧拉方程'0y y dF F dx-=, 得:''++0y y x =,解微分方程得通解:12sin cos y C x C x x =+-,代入边界条件(0)0,(1)0y y ==,解得sin sin1xy x =-。
2、如图所示,一长度为L 质量为M 的项链悬挂在跨度为2a 的A 和B 两点,项链在重力场中自然下垂,试求该链悬在稳定状态时的曲线方程。
(重力加速度为g )解: (方法一)将原坐标系(),x y 向下平移1C 个单位(),x y ,拟采用1cosh y C t =代换求解 在新坐标系中,悬链在稳定状态时能量处于最小值。
悬链线质量密度MLλ=, 长度为dl 的势能为:()Mgy dW dmgy dl gy dl L λ====,悬链总势能泛函:(a a a a Mg W dW dx dx L --===⎰⎰⎰,约束条件为:悬链线长度aL -=⎰,泛函的被积函数:(),F y y '=,势能泛函取极小值时的欧拉方程为:'1'y F y F C -=, 即:21C -=,化简得:y C =于是:dx =x =,令1cosh y C t =(在新坐标系下才能作此代换),得:1sinh sinh dy C tdt t =⎧=,代入x =,得112x C dt C t C ==+⎰所以,21x C t C -=,21cosh cosh x C t C ⎛⎫-= ⎪⎝⎭回代1cosh y C t =得:211cosh x C y C C ⎛⎫-= ⎪⎝⎭,曲线关于y 轴对称得20C =,1C由悬链线长度112sinhaaL C C -==⎰给出, 故新坐标系下所求曲线方程为11cosh x y C C ⎛⎫=⎪⎝⎭, 1C 由11sinh 2L aC C =确定。
《有限元法及其应用》课后习题目录第1章绪论 (3)第2章有限单元法理论基础 (4)第3章杆系结构单元 (5)第4章平面三角形单元 (7)第5章平面四边形等参数单元 (9)第6章常用有限元软件及其在岩土工程中的应用 (10)第1章绪论1-1试说明有限元法解题的基本思路。
1-2试说明用有限元法解题的主要步骤。
1-3有限元法主要有哪些优点?第2章有限单元法理论基础2-1 何为虚功,虚功原理的具体思路是什么?2-2 虚功原理的适用条件有哪些?2-3 位移模式的概念是什么?2-4 如何构造位移模式?2-5 弹性力学问题的求解需要满足哪些条件?第3章 杆系结构单元3-1 推导横截面积为A 的一维桁架结构的单元刚度矩阵。
3-2 图示(见题图3-1)为一平面超静定桁架结构,在载荷P 作用下,求各杆件的轴力。
此结构可看成由14、24、34三个杆单元组成,每个杆单元的两端为杆单元的结点,各结点的水平、铅直位移分别用u 、v 表示。
题图3-1 平面超静定桁架结构a —平面结构;b —单元组成;c —各结点位移3-3 图示(见题图3-2)刚架中,两杆为尺寸相同的等截面杆件,横截面面积为20.5m A =,截面惯性矩为41m 24I =,弹性模量7310kPa E =⨯,求解此结构。
题图3-2 等截面刚架结构第4章平面三角形单元4-1 按位移求解的有限单元法中:(1)应用了哪些弹性力学的基本方程?(2)应力边界条件及位移边界条件是如何反映的?(3)力的平衡条件是如何满足的?(4)变形协调条件是如何满足的?4-2 在有限单元法中,如何应用虚功原理导出单元内的应力和结点力的关系式,并将外荷载静力等效地变换为结点荷载?4-3 为了保证有限单元法解答的收敛性,平面三角形单元位移模式应满足哪些条件?μ=,记杨氏弹性模4-4 题图4-1所示等腰直角三角形单元,设14量为E,厚度为t,求形函数矩阵[]N、应变矩阵[]B、应力矩阵[]S与单元刚度矩阵[]eK。
1.1 有限单元法中“离散”的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题的?位移有限元法的标准化程式是怎样的?(1)离散的含义即将结构离散化,即用假想的线或面将连续体分割成数目有限的单元,并在其上设定有限个节点;用这些单元组成的单元集合体代替原来的连续体,而场函数的节点值将成为问题的基本未知量。
(2)给每个单元选择合适的位移函数或称位移模式来近似地表示单元内位移分布规律,即通过插值以单元节点位移表示单元内任意点的位移。
因节点位移个数是有限的,故无限自由度问题被转变成了有限自由度问题。
(3)有限元法的标准化程式:结构或区域离散,单元分析,整体分析,数值求解。
1.3 单元刚度矩阵和整体刚度矩阵各有哪些性质?各自的物理意义是什么?两者有何区别?单元刚度矩阵的性质:对称性、奇异性(单元刚度矩阵的行列式为零)。
整体刚度矩阵的性质:对称性、奇异性、稀疏性。
单元 Kij 物理意义 Kij 即单元节点位移向量中第 j 个自由度发生单位位移而其他位移分量为零时,在第 j 个自由度方向引起的节点力。
整体刚度矩阵 K 中每一列元素的物理意义是:要迫使结构的某节点位移自由度发生单位位移,而其他节点位移都保持为零的变形状态,在所有个节点上需要施加的节点荷载。
2.2 什么叫应变能?什么叫外力势能?试叙述势能变分原理和最小势能原理,并回答下述问题:势能变分原理代表什么控制方程和边界条件?其中附加了哪些条件?(1)在外力作用下,物体内部将产生应力σ和应变ε,外力所做的功将以变形能的形式储存起来,这种能量称为应变能。
(2)外力势能就是外力功的负值。
(3)势能变分原理可叙述如下:在所有满足边界条件的协调位移中,那些满足静力平衡条件的位移使物体势能泛函取驻值,即势能的变分为零δ∏p=δ Uε+δV=0此即变分方程。
对于线性弹性体,势能取最小值,即δ2∏P=δ2Uε+δ2V≥0此时的势能变分原理就是著名的最小势能原理。