模糊推理T-S解析
- 格式:ppt
- 大小:409.00 KB
- 文档页数:12


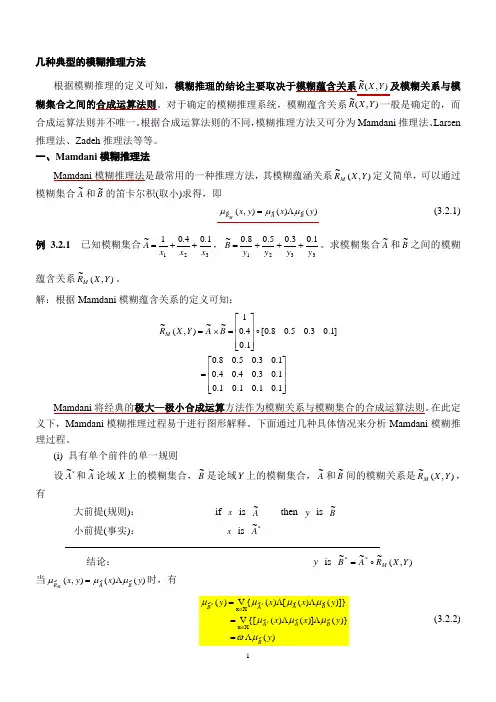
几种典型的模糊推理方法根据模糊推理的定义可知,模糊推理的结论主要取决于模糊蕴含关系),(~Y X R 及模糊关系与模糊集合之间的合成运算法则。
对于确定的模糊推理系统,模糊蕴含关系),(~Y X R 一般是确定的,而合成运算法则并不唯一。
根据合成运算法则的不同,模糊推理方法又可分为Mamdani 推理法、Larsen 推理法、Zadeh 推理法等等。
一、Mamdani 模糊推理法Mamdani 模糊推理法是最常用的一种推理方法,其模糊蕴涵关系),(~Y X R M 定义简单,可以通过模糊集合A ~和B ~的笛卡尔积(取小)求得,即)()(),(~~~y x y x B A RMμμμΛ= (3.2.1) 例 3.2.1 已知模糊集合3211.04.01~x x x A ++=,33211.03.05.08.0~y y y y B +++=。
求模糊集合A ~和B ~之间的模糊蕴含关系),(~Y X R M 。
解:根据Mamdani 模糊蕴含关系的定义可知:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⨯=1.01.01.01.01.03.04.04.01.03.05.08.0]1.03.05.08.0[1.04.01~~),(~B A Y X R MMamdani 将经典的极大—极小合成运算方法作为模糊关系与模糊集合的合成运算法则。
在此定义下,Mamdani 模糊推理过程易于进行图形解释。
下面通过几种具体情况来分析Mamdani 模糊推理过程。
(i) 具有单个前件的单一规则设*~A 和A ~论域X 上的模糊集合,B ~是论域Y 上的模糊集合,A ~和B ~间的模糊关系是),(~Y X R M ,有大前提(规则): if x is A ~ then y is B ~小前提(事实): x is *~A结论: y is ),(~~~**Y X R A B M =当)()(),(~~~y x y x B A RMμμμΛ=时,有 )()}()]()({[V )]}()([)({V )(~~~~Xx ~~~Xx ~***y y x x y x x y BB A AB A AB μωμμμμμμμΛ=ΛΛ=ΛΛ=∈∈ (3.2.2)其中)]()([V ~~Xx *x x AA μμωΛ=∈,称为A ~和*~A 的适配度。

几种典型的模糊推理方法根据模糊推理的定义可知,模糊推理的结论主要取决于模糊蕴含关系),(~Y X R 及模糊关系与模糊集合之间的合成运算法则。
对于确定的模糊推理系统,模糊蕴含关系),(~Y X R 一般是确定的,而合成运算法则并不唯一。
根据合成运算法则的不同,模糊推理方法又可分为Mamdani 推理法、Larsen 推理法、Zadeh 推理法等等。
一、Mamdani 模糊推理法Mamdani 模糊推理法是最常用的一种推理方法,其模糊蕴涵关系),(~Y X R M 定义简单,可以通过模糊集合A ~和B ~的笛卡尔积(取小)求得,即)()(),(~~~y x y x B A RMμμμΛ= (3.2.1)例 3.2.1 已知模糊集合3211.04.01~x x x A ++=,33211.03.05.08.0~y y y y B +++=。
求模糊集合A ~和B ~之间的模糊蕴含关系),(~Y X R M 。
解:根据Mamdani 模糊蕴含关系的定义可知:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⨯=1.01.01.01.01.03.04.04.01.03.05.08.0]1.03.05.08.0[1.04.01~~),(~ B A Y X R MMamdani 将经典的极大—极小合成运算方法作为模糊关系与模糊集合的合成运算法则。
在此定义下,Mamdani 模糊推理过程易于进行图形解释。
下面通过几种具体情况来分析Mamdani 模糊推理过程。
(i) 具有单个前件的单一规则设*~A 和A ~论域X 上的模糊集合,B ~是论域Y 上的模糊集合,A ~和B ~间的模糊关系是),(~Y X R M ,有大前提(规则): if x is A ~then y is B ~小前提(事实): x is *~A结论: y is ),(~~~**Y X R A B M =当)()(),(~~~y x y x B A RMμμμΛ=时,有)()}()]()({[V )]}()([)({V )(~~~~Xx ~~~Xx ~***y y x x y x x y BB A AB A AB μωμμμμμμμΛ=ΛΛ=ΛΛ=∈∈ (3.2.2)其中)]()([V ~~Xx *x x AA μμωΛ=∈,称为A ~和*~A 的适配度。
毕业设计基于T-S模型的模糊控制系统设计姓名:黄大雕学号:01010203班级:07 自动化1专业:自动化所在系:自动化工程系指导老贾穆尔师:基于T-S模型的模糊控制系统设计摘要模糊控制系统的稳定性分析和设计方法是模糊理论的重要研究课题。
模糊系统本质上是非线性的,其稳定性分析比较困难。
到目前为止虽然已经存在许多关于模糊系统稳定性的理论,但仍未形成完善的理论体系,还有许多理论问题有待进一步深入研究。
在模糊控制文献中,大多数方法是基于Lyapunov 的稳定性理论,Lyapunov 系统稳定形式是以观测系统中的能量平衡为基础的。
根据Lyapunov 原理,连续能量损耗的系统最终将进入平衡状态。
因此利用某个系统能量函数能够评价系统的稳定性,这个函数通常称为Lyapunov 函数或Lyapunov 候选函数。
最常用的Lyapunov 函数形式是广义二次型,由于把Lyapunov定义为广义二次型,因此系统稳定性的问题就转换为寻找一个恰当的矩阵的问题。
基于以上分析,本文针对T-S模型利用Matlab实现模糊控制系统的设计,并用一个非线性的弹簧阻尼机械系统进行仿真保证系统的稳定性关键词:Lyapunov函数法;T-S模型;模糊控制系统Model Based on the T-S Fuzzy Control System DesignABSTRACTThe stability an alysis and desig n of fuzzy con trol systems have bee n the most importa nt problems in fuzzy theory. The research of fuzzy con trol theory in cludes a series of mai n problems, such as the stability an alysis, the system desig n approaches and the improveme nt of system performa nee.In the fuzzy con trol literature, most methods are based on Lyap unov stability theory, Lyap unov system is stable form is the observ ing systems in the en ergy bala nee based. Accordi ng to Lyap unov theory, the con ti nu ous en ergy loss of the system will eve ntually en ter theory.Therefore, the use of the energy function of a system able to evaluate the stability of the system, This fun cti on is ofte n referred to as the Lyap unov fun cti on or Lyap unov can didate fun cti on. The most com monly used form of Lyap unov function is a gen eralized quadratic. Since the Lyap unov is defi ned as the gen eralized quadraticSystem stability problem is conv erted to the problem of finding an appropriate matrix.Based on the above an alysis, for the TS model using Matlab fuzzy con trol system desig n, and a non li near spri ng-damper mecha ni cal system simulatio n to en sure stability of the systemKey Words: Lyapunov Function; Fuzzy Control System; T-S Model目录第一章绪论 (1)1.1模糊控制系统的产生与发展 (1)1.1.1模糊控制理论的产生 (1)1.1.2模糊控制理论的发展概况 (2)1.1.3模糊控制的研究成果 (3)1.1.4有待解决的问题 (4)1.2本文的研究课题 (4)1.2.1选题意义 (4)1.2.2论文内容安排 (5)1.3 本章小结 (5)第二章模糊控制理论基础. (7)2.1模糊数学基础 (7)2.1.1模糊集合 (7)2.1.2模糊运算 (8)2.2模糊逻辑与近似推理 (10)2.3模糊逻辑系统 (11)2.4T-S 模糊系统 (15)2.4.1T-S 模糊模型描述 (15)2.4.2T-S 模糊系统特点 (16)2.5本章小结 (16)第三章运用Matlab 实现T-S 模型模糊系统的设计 (18)3.1Matlab 介绍 (18)3.1.1Matlab 的优点 (18)3.1.2Matlab 的缺点 (19)3.2模糊控制系统的设计 (19)3.2.1FIS 编辑器 (19)3.2.2隶属度函数 (22)3.2.3根据模糊规则表编辑规则 (25)3.2.4形成系统系统模型 (26)第四章仿真实例 (28)第五章结论和展望 (32)5.1主要结论 (32)5.2展望 (32)参考文献 (33)致谢错误!未定义书签第一章绪论1.1模糊控制系统的产生与发展1.1.1模糊控制理论的产生美国数学家维纳在四十年代创立控制论以来,自动控制理论已经历经经典控制理论、现代控制理论两个发展阶段,现在已进入智能控制理论发展时期。
两类T-S 模糊模型的建模方法T-S 模糊模型的辨识有两种方法:通过运动方程建立T-S 模糊模型和通过输入输出 数据利用模糊C 均值聚类算法、最小二乘法、遗传算法等拟合算法辨识模型参数。
1. 通过运动方程建立T-S 模糊模型。
这种方法首先要对系统进行运动分析,然后得到运动状态的状态空间形式(非线性),再利用T-S 模糊模型分段近似,得到系统的T-S 模糊模型。
实例:一级倒立摆系统的模型建立[模糊控制系统的设计及稳定性分析P45]现在利用一般的线性化方法构造局部模型。
假设系统的真值模型为:()()x f x g x u =+ (1) 其中x 是系统的状态变量,u 是系统的输入,(),()f x g x 均是关于x 的非线性函数。
为了方便,记(,)()()F x u x f x g x u ==+ (2) 将(,)F x u 在工作点00(,)x u 用泰勒级数展开法可得:00000,000(,)()|()|()...x x x x u u u u F Fx F x u F x u x x u u x u ====∂∂==+-+-+∂∂ (3) 上式中00000(,)()()F x u f x g x u =+,记00|x x u u F A x ==∂=∂,00|x x u u FB u ==∂=∂,并忽略式(3)中的高次项得:0000((,))x Ax Bu F x u Ax Bu =++-- (4)1.1若00(,)(0,0)x u =且是系统的平衡点,则00(,)(0,0)0F x u F ==,此时可得平衡点00(,)(0,0)x u =处的一个局部线性化模型x Ax Bu =+ (5) 其中0000|x x u u F A x ====∂=∂,0000|x x u u FB u ====∂=∂。
1.2若00(,)x u 既不是平衡点,又不满足00(,)(0,0)x u =,我们采用下面的线性化方法。
takagi-sugeno模糊推理法
Takagi-Sugeno模糊推理法是一种常见的模糊控制方法,也被称
为T-S方法。
该方法基于对输入变量和输出变量进行分段线性建模,
从而实现控制系统的设计。
具体来说,Takagi-Sugeno模糊推理法分为两个步骤。
首先,将
输入域划分为若干个模糊子集,针对每个模糊子集建立一个线性模型,这些线性模型可以表示为条件语句的形式。
然后,将这些条件语句进
行加权求和,得到输出变量的模糊输出值。
Takagi-Sugeno模糊推理法不仅可以用于模糊控制系统的设计,
还可以用于数据挖掘、模式识别等领域。
它的优点是对于复杂的非线
性系统有较好的适应性和泛化能力。