实验9 时延估计实验
- 格式:doc
- 大小:237.00 KB
- 文档页数:4

![声源定位中的时延估计方法研究[1]](https://img.taocdn.com/s1/m/05e95fc489eb172ded63b7c2.png)

国防科学技术大学电子科学与工程学院《随机信号分析与处理》课程论文这里做了 100 次仿真估计估计均值为 44.9731,随着次数增加估计值更加接近 45。
相关函数估计的实现采用相同的信号,进行估计,对信号进行匹配滤波处理仿真结果如下可见信号经过皮匹配滤波后瞬时信噪比得以提高,便于提高时延国防科学技术大学电子科学与工程学院《随机信号分析与处理》课程论文的检测。
不同信噪比将影响信号的估计精度,信噪比越大时延估计越精确我们通过匹配滤波可以提高信号的瞬时信噪比进而提高信号的检测精度,在信噪比在-9db 下的估计误差为 7.1615e-004,提高信噪比,在信噪比为 5db国防科学技术大学电子科学与工程学院《随机信号分析与处理》课程论文下的估计误差为 2.6042e-004,可见仿真可以实现较高精度的检测。
参考文献 1、唐娟等。
不同环境下的时延估计算法及其仿真研究,计量学报,2001 2、江南,黄建国等。
基于互相关函数的频域实现时延估计器,计量学报,25 卷第四期,2004 3、陆军、钱裕美。
自适应多目标时延估计器。
数据采集与处理,第四期 4、侯子江,麦克风阵列时延估计算法的研究(研究生论文)附录程序代码: clearfs=1024; DD=pi/6; f=20; t=0:1/fs:1023/fs; for i=1:100x=1.*sin(2*pi*f*t+(5.*rand(1024,1'; y=1.*sin(2*pi*f*t+DD+(5.*rand(1024,1';X=fft(x,1024; Y=fft(y,1024; psd=csd(x,y;d=sum(f*atan(imag(max(psd/real(max(psd/sum(f; d=d*180/pi;subplot(2,2,1,plot(x;title('x1(t'; subplot(2,2,3,plot(abs(X,'r';title('x1(tµÄƵÆ×'; subplot(2,2,2,plot(y;title('x2(t'; subplot(2,2,4,plot(abs(Y,'g';title('x2(tµÄƵÆ×'; ys(i=d; yt(i=30; %text(1,d+1,'{Ïàλ²î}=60'国防科学技术大学电子科学与工程学院《随机信号分析与处理》课程论文 end figure plot(ys,'*'; hold on plot(yt,'r'; rr=mean(ys; figure for i=1:100 R=xcorr(x,y; plot(R; [t,j(i]=max(R; end D=abs((mean(j-fs/fs; Dl=DD/(2*pi*f; abs(D-Dlh1=5.*sin(2*pi*f*(1023/fs-t; h2=5.*sin(2*pi*f*(1023/fs-t+DD; Fh1=fft(h1; Fh2=fft(h2; x0=ifft(X.*Fh1; y0=ifft(Y.*Fh2; x00=conv(x,h1; y00=conv(y,h2; for i=1:100R0=xcorr(x00,y00; [n,p(i]=max(R0; end D0=abs((mean(p-fs/fs; Dl0=DD/(2*pi*f;abs(D0-Dl0 hold on plot(R0,'r';title('ÐźŵÄÏà¹Øº¯Êý ÐÅÔë±ÈΪ-9db';。

时延的确定方法
时延是指信息传输过程中所花费的时间,是网络性能的重要指标之一。
在网络工程和通信领域中,时延的确定方法一直是研究的重点之一。
目前,时延的确定方法主要有以下几种:
1. 采用Ping命令测量时延:Ping是一种常用的网络诊断工具,可以用来测试网络的连通性和响应时间。
通过向目标主机发送特定格式的数据包,并测量返回的响应时间,可以计算出数据包的往返时延。
2. 使用网络性能分析工具测量时延:网络性能分析工具可以通
过抓取网络数据包,分析网络流量,来测量网络性能指标,包括时延、带宽、丢包率等。
常用的网络性能分析工具有Wireshark、NetFlow 等。
3. 基于模拟仿真的方法确定时延:模拟仿真是一种常用的网络
性能分析方法,可以通过建立网络模型,模拟网络的运行过程,来评估网络性能指标。
在网络模型中,可以加入时延的模拟,来确定网络的时延。
4. 基于实验测量的方法确定时延:实验测量是一种直接测量网
络性能指标的方法,可以通过搭建实验环境,对网络进行实际测试,来确定网络的时延。
常用的实验测量方法有基于网络测试仪器的测量、基于用户体验的测量等。
综上所述,时延的确定方法有多种,可以选择适合自己的方法进行测量。
在实际工程中,需要综合考虑不同方法的优劣,选择合适的方法进行网络性能分析和优化。
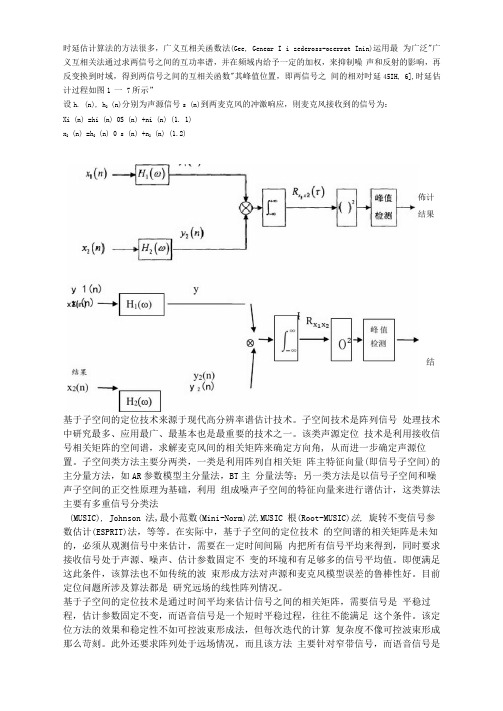
时延估计算法的方法很多,广义互相关函数法(Gee, Genear I i zedeross-ocerrat Inin)运用最 为广泛"广义互相关法通过求两信号之间的互功率谱,并在频域内给予一定的加权,来抑制噪 声和反射的影响,再反变换到时域,得到两信号之间的互相关函数"其峰值位置,即两信号之 间的相对吋延45IH, 6],时延估计过程如图1 一 7所示”设h. (n), h 2 (n)分别为声源信号s (n)到两麦克风的冲激响应,則麦克风接收到的信号为:Xi (n) =hi (n) 0S (n) +ni (n) (1. 1)x 2 (n) =h 2 (n) 0 s (n) +n 2 (n) (1.2)基于子空间的定位技术来源于现代高分辨率谱估计技术。
子空间技术是阵列信号 处理技术中研究最多、应用最广、最基本也是最重要的技术之一。
该类声源定位 技术是利用接收信号相关矩阵的空间谱,求解麦克风间的相关矩阵来确定方向角, 从而进一步确定声源位置。
子空间类方法主要分两类,一类是利用阵列自相关矩 阵主特征向量(即信号子空间)的主分量方法,如AR 参数模型主分量法,BT 主 分量法等;另一类方法是以信号子空间和噪声子空间的正交性原理为基础,利用 组成噪声子空间的特征向量来进行谱估计,这类算法主要有多重信号分类法(MUSIC), Johnson 法,最小范数(Mini-Norm)法,MUSIC 根(Root-MUSIC)法, 旋转不变信号参数估计(ESPRIT)法,等等。
在实际中,基于子空间的定位技术 的空间谱的相关矩阵是未知的,必须从观测信号中来估计,需要在一定时间间隔 内把所有信号平均来得到,同时要求接收信号处于声源、噪声、估计参数固定不 变的环境和有足够多的信号平均值。
即便满足这此条件,该算法也不如传统的波 束形成方法对声源和麦克风模型误差的鲁棒性好。
目前定位问题所涉及算法都是 研究远场的线性阵列情况。
实验一一、实验名称:传输时延与传播时延的比较二、实验目的1.深入理解传输时延与传播时延的概念以及区别2.掌握传输时延与传播时延的计算方法三、实验环境1.运行Windows Server 2003 /XP操作系统的PC机一台。
2.java虚拟机,分组交换Java程序length rate packet size result 10km 1mbps 100bytes 0.840ms 10km 512kbps 500bytes 7.849ms 10km 1mbps 1kbytes 15.669ms 10km 10mbps 1bytes 0.840ms 10km 100mbps 1bytes 0.120ms 100km 1mbps 100bytes 0.440ms 1000km 1mbps 100bytes 3.660ms 10km 10mbps 1kbytes 1.160ms 100km 100mbps 1kbytes 0.440ms 100km 100mbps 100bytes 0.370ms 1000km 100mbps 500bytes 3.620ms 100km 100mbps 500bytes 0.400ms 1000km 512mbps 500bytes 11.389ms 1000km 1mbps 500bytes 7.579ms 1000km 10mbps 500bytes 3.980ms 1000km 1mbps 100bytes 4.379ms1000km 1mbps 1kbytes 11.597ms1000km 512mbps 1kbytes 19.199ms1000km 10mbps 1kbytes 4.379ms1000km 100mbps 1kbytes 3.660ms10km 512mbps 1kbytes 15.669ms10km 512mbps 100bytes 1.600ms10km 1mbps 500bytes 4.040ms10km 10mbps 500bytes 0.440ms10km 100mbps 500bytes 0.080ms1000km 512kps 100bytes 5.139ms100km 512kps 100bytes 1.920ms100km 1mbps 100bytes 1.160ms100km 1mbps 500bytes 4.359ms100km 10mbps 500bytes 0.760ms100km 100mbps 500bytes 0.400ms100km 10mbps 100bytes 0.440ms100km 10mbps 1kbytes 1.160ms100km 100mbps 1kbytes 0.440ms100km 512kps 1kbytes 15.989ms100km 512kps 500bytes 8.169ms五、实验结果分析1、当Rate和Packet一定时,length越长,时延越长。
一、实验目的1. 了解回声消除(AEC)的基本原理和实现方法;2. 掌握自适应滤波器和神经网络在回声消除中的应用;3. 通过实验验证所提出的方法在回声消除中的有效性。
二、实验原理回声消除是指消除或减弱声音信号中的回声成分,提高通话质量。
在通话过程中,声音信号从扬声器发出,经反射、折射等途径到达麦克风,产生回声。
回声消除的基本原理如下:1. 时延估计:通过分析输入信号和参考信号,估计两者之间的时间差,实现信号的时延对齐。
2. 线性回声消除:利用自适应滤波器对参考信号进行滤波,模拟回声,再从输入信号中减去模拟的回声,达到消除回声的目的。
3. 双讲检测:当检测到双讲时,固定滤波器参数,避免滤波器系数发散。
4. 非线性回声消除:利用神经网络对残余回声、晚期混响和环境噪音进行抑制。
三、实验环境1. 硬件环境:计算机、麦克风、扬声器、音频采集卡等;2. 软件环境:Python、PyTorch、NumPy等。
四、实验步骤1. 数据采集:采集一段包含回声的语音信号作为实验数据。
2. 时延估计:利用互相关算法估计输入信号和参考信号之间的时延。
3. 线性回声消除:设计自适应滤波器,对参考信号进行滤波,模拟回声,再从输入信号中减去模拟的回声。
4. 双讲检测:设计双讲检测算法,检测通话过程中是否存在双讲现象。
5. 非线性回声消除:设计神经网络,对残余回声、晚期混响和环境噪音进行抑制。
6. 实验结果分析:对比不同方法的回声消除效果,分析方法的优缺点。
五、实验结果与分析1. 时延估计:通过互相关算法,成功估计出输入信号和参考信号之间的时延,为后续的线性回声消除提供了依据。
2. 线性回声消除:设计自适应滤波器,对参考信号进行滤波,成功模拟出回声,并从输入信号中减去模拟的回声,实现了线性回声消除。
3. 双讲检测:设计双讲检测算法,成功检测出通话过程中的双讲现象,避免了滤波器系数的发散。
4. 非线性回声消除:设计神经网络,对残余回声、晚期混响和环境噪音进行抑制,提高了回声消除的效果。
外辐射源雷达系统中时延估计算法及仿真时延估计是雷达系统中的一个重要问题,尤其是在外辐射源雷达系
统中更是如此。
本文将介绍外辐射源雷达系统中时延估计算法及仿真。
一、时延估计算法
时延估计算法是指通过雷达系统中的信号处理,估计出目标信号的时延。
在外辐射源雷达系统中,时延估计算法的主要目的是估计出目标
信号与干扰信号之间的时延差。
常用的时延估计算法有交叉相关法、
最小二乘法、最大似然法等。
交叉相关法是一种常用的时延估计算法,其基本思想是通过计算目标
信号与干扰信号的互相关函数,得到它们之间的时延差。
最小二乘法
是一种通过最小化误差平方和来估计时延的方法,其优点是计算简单,但对噪声敏感。
最大似然法是一种通过最大化似然函数来估计时延的
方法,其优点是对噪声不敏感,但计算复杂。
二、仿真实验
为了验证时延估计算法的有效性,我们进行了仿真实验。
实验中,我
们使用MATLAB软件模拟了外辐射源雷达系统,并采用了交叉相关法、最小二乘法、最大似然法三种时延估计算法进行了比较。
实验结果表明,三种算法均能够有效地估计出目标信号与干扰信号之
间的时延差。
其中,最大似然法的估计精度最高,但计算复杂度也最高;最小二乘法的计算简单,但对噪声敏感;交叉相关法的计算简单,对噪声不敏感,但估计精度相对较低。
三、总结
本文介绍了外辐射源雷达系统中时延估计算法及仿真实验。
时延估计
算法是雷达系统中的一个重要问题,其精度和计算复杂度直接影响到
雷达系统的性能。
在实际应用中,应根据具体情况选择合适的时延估
计算法,以达到最佳的性能表现。
实验一一、实验名称:传输时延与传播时延的比较二、实验目的1.深入理解传输时延与传播时延的概念以及区别2.掌握传输时延与传播时延的计算方法三、实验环境1.运行Windows Server 2003 /XP操作系统的PC机一台。
2.java虚拟机,分组交换Java程序四、实验记录实验开始日期:2011-10-20 14:00 实验结束时间:2011-10-2017:00实验地点:3603实验人:liu实验条件PⅣ微机(主频2GHz,内存512MB),Windows 2003 Server, Oracle 8i实验主要步骤1、熟悉实验环境实验之前先要设定好链路长度、链路传输速率和分组长度。
链路长度可以分为1000km、100km、10km,速率可分为1Mb/s、10Mb/s、100Mb/s,分组长度可选择100B、500B、1Kb。
2、设置参数Length, Rate, Packet size 设定好各个参数之后按“Start”键,分组即开始传输实验现象见下表:length rate packet size result10km 1mbps 100bytes 0.840ms10km 512kbps 500bytes 7.849ms10km 1mbps 1kbytes 15.669ms10km 10mbps 1bytes 0.840ms10km 100mbps 1bytes 0.120ms100km 1mbps 100bytes 0.440ms1000km 1mbps 100bytes 3.660ms10km 10mbps 1kbytes 1.160ms100km 100mbps 1kbytes 0.440ms100km 100mbps 100bytes 0.370ms1000km 100mbps 500bytes 3.620ms100km 100mbps 500bytes 0.400ms1000km 512mbps 500bytes 11.389ms1000km 1mbps 500bytes 7.579ms1000km 10mbps 500bytes 3.980ms1000km 1mbps 100bytes 4.379ms1000km 1mbps 1kbytes 11.597ms1000km 512mbps 1kbytes 19.199ms1000km 10mbps 1kbytes 4.379ms1000km 100mbps 1kbytes 3.660ms10km 512mbps 1kbytes 15.669ms10km 512mbps 100bytes 1.600ms10km 1mbps 500bytes 4.040ms10km 10mbps 500bytes 0.440ms10km 100mbps 500bytes 0.080ms1000km 512kps 100bytes 5.139ms100km 512kps 100bytes 1.920ms100km 1mbps 100bytes 1.160ms100km 1mbps 500bytes 4.359ms100km 10mbps 500bytes 0.760ms100km 100mbps 500bytes 0.400ms100km 10mbps 100bytes 0.440ms100km 10mbps 1kbytes 1.160ms100km 100mbps 1kbytes 0.440ms100km 512kps 1kbytes 15.989ms100km 512kps 500bytes 8.169ms五、实验结果分析1、当Rate和Packet一定时,length越长,时延越长。
实验9:时延估计实验
一.实验目的
1、掌握互相关时延估计的原理和实现方法
2、了解互相关时延估计程序设计方法
二.实验设备
计算机(已安装Code Composer Studio 4软件),SDUST-EEC-C55X DSP 实验系统实验箱,相关连线。
三.实验原理
互相关时延估计方法原理
假设)(1t x 和)(2t x 是2个传感器接受发到的信号,传感器接收信号模型为:
)()()(11t n t s t x += (1)
)()()(22t n d t s t x +-= (2)
其中,)(t s 是目标声源信号,)(1t n 和)(2t n 加性噪声。
d 就是所要估计的信号到达两个传感器的相对延迟时间。
互相关函数估计时间延迟方法(适用于观测噪声)(1t n 和)(2t n 为零均值噪声,它们彼此独立,并且与)(t s 独立):
[])()()()()()()(21212112ττττττn n sn sn ss R R d R d R t x t x E R ++-+-=+= (3)
假设)(1t n 、 )(2t n 和)(t s 互不相关,可得:
)()(12d R R ss -=ττ (4)
式中)(τss R 表示为源信号)(t s 的自相关函数,由自相关函数的性质可知)0()(ss ss R d R ≤-τ,即当0=-d τ时,两个接受信号的相关性最大,选择相关函数峰值点位置作为时延估计值。
算法流程框图:
实验程序设计:
实验中,通过信号分析仪循环播放wave文件(wave文件为双声道冲击函数,两个声道信号之间存在时间延迟d),经虚拟信号分析仪AOUTR和AOUTL接入主板,采用互相关函数的方法估计时间延迟d,其中采样率由定时中断设定。
实验程序流程图:
N
四.实验步骤
1.实验准备
-⑴连接实验设备:
-启动Code Composer Studio 4软件
-连接试验箱
-计算机通过USB电缆连接仿真器和虚拟信号分析仪。
-
实验箱
+5V
电源插座与
SDUST-EEC-5509A主板连接。
-双击图标,启动信号分析仪
-打开D:\C55xEx\ex9_corr\pluse.wav文件,选择循环播放。
信号分析仪的使用请参见虚拟信号分析仪V er1.0使用指南
⑵准备音频输入
-用音频线将虚拟信号分析仪AOUTR、AOUTL分别与主板上JP5 RIN0、LIN0连接。
2.打开工程文件:
工程目录为:D:\C55xEx\ex9_corr,理解程序中采样率的设定过程。
3.编译、下载程序。
-单击图标编译程序。
-单击图标,启动调试器,系统会自动进入调试视图。
-单击图标,下载程序,选择路径:D:\C55xEx\ex9_corr\Debug,选择corr.out文件。
4.打开图形显示窗口,观察滤波效果显示:
图形显示窗口显示采集信号in_0和in_1;
-将T_D_E加入观察窗口,选中T_D_E右键单击选择Add Watch Expression菜单项;
-在程序/*break point*/处添加断点;
-全速运行程序,对比观察窗口中记录的冲击函数波形,计算冲击函数峰值对应横坐标的差值M;
-计算相对延迟时间T:M/采样率;
-继续运行程序,观察T_D_E数值变化;
-比较T 与T_D_E;
5.退出CCS。