自动控制理论课后作业题
- 格式:docx
- 大小:700.30 KB
- 文档页数:19
目录1自动控制系统的基本概念1.1内容提要1.2习题与解答2自动控制系统的数学模型2.1内容提要2.2习题与解答3自动控制系统的时域分析3.1内容提要3.2习颗与他答4根轨迹法4.1内容提要4.2习题与解答5频率法5.1内容提要5.2习题与解答6控制系统的校正及综合6.1内容提要6.2习题与解答7非线性系统分析7.1内容提要7.2习题与解答8线性离散系统的理论基础8.1内容提要8.2习题与解答9状态空间法9.1内容提要9.2习题与解答附录拉普拉斯变换参考文献1自动控制系统的基本概念1. 1内容提要基本术语:反馈量,扰动量,输人量,输出量,被控对象;基本结构:开环,闭环,复合;基本类型:线性和非线性,连续和离散,程序控制与随动;基本要求:暂态,稳态,稳定性。
本章要解决的问题,是在自动控制系统的基本概念基础上,能够针对一个实际的控制系统,找出其被控对象、输人量、输出量,并分析其结构、类型和工作原理。
1.2习题与解答题1-1图P1-1所示,为一直流发电机电压白动控制系统示意图。
图中,1为发电机;2为减速器;3为执行电机;4为比例放大器;5为可调电位器。
(1)该系统有哪些环节组成,各起什么作用” (2)绘出系统的框图,说明当 负载电流变化时,系统如何保持发 电机的电压恒定 (3)该系统是有差系统还是无 差系统。
(4)系统中有哪些可能的扰动, 答(1)该系统由给定环节、比较环节、中间环节、执行结构、检测环节、 发电机等环节组成。
给定环节:电压源0U 。
用来设定直流发电机电压的给定值。
比较环节:本系统所实现的被控量与给定量进行比较,是通过给定电 压与反馈电压反极性相接加到比例放大器上实现的中间环节:比例放大器。
它的作用是将偏差信号放大,使其足以带动 执行机构工作。
该环节又称为放大环节执行机构:该环节由执行电机、减速器和可调电位器构成。
该环节的 作用是通过改变发电机励磁回路的电阻值,改变发电机的磁场,调节发 电机的输出电压被控对象:发电机。

自动控制原理1一、单项选择题(每小题1分,共20分)9. 一阶微分环节Ts s G +=1)(,当频率T=ω时,则相频特性)(ωj G ∠为( ) A.45° B.-45° C.90° D.-90° 10.最小相位系统的开环增益越大,其( )A.振荡次数越多B.稳定裕量越大C.相位变化越小D.稳态误差越小11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。
12.某单位反馈系统的开环传递函数为:())5)(1(++=s s s ks G ,当k =( )时,闭环系统临界稳定。
A.10B.20C.30D.4013.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数有( ) A.0 B.1 C.2 D.3 14.单位反馈系统开环传递函数为()ss s s G ++=652,当输入为单位阶跃时,则其位置误差为( ) A.2 B.0.2 C.0.5 D.0.05 15.若已知某串联校正装置的传递函数为1101)(++=s s s G c ,则它是一种( )A.反馈校正B.相位超前校正C.相位滞后—超前校正D.相位滞后校正 16.稳态误差e ss 与误差信号E (s )的函数关系为( )A.)(lim 0s E e s ss →= B.)(lim 0s sE e s ss →=C.)(lim s E e s ss ∞→= D.)(lim s sE e s ss ∞→=17.在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( ) A.减小增益 B.超前校正 C.滞后校正 D.滞后-超前 18.相位超前校正装置的奈氏曲线为( )A.圆B.上半圆C.下半圆D.45°弧线 19.开环传递函数为G (s )H (s )=)3(3s s K,则实轴上的根轨迹为( )三、名词解释(每小题3分,共15分) 31.稳定性32.理想微分环节 33.调整时间 34.正穿越 35.根轨迹四、简答题(每小题5分,共25分)36.为什么说物理性质不同的系统,其传递函数可能相同 ? 举例说明。
绪论单元测试1【判断题】(100 分)自动控制理论经历了经典控制理论、现代控制理论和近代控制理论三个发展阶段。
A.错B.对第一章测试1【单选题】(10 分)下列系统中属于开环控制的为()。
A.家用空调器B.普通车床C.无人驾驶车D.自动跟踪雷达2【单选题】(10 分)下列系统属于闭环控制系统的为()。
A.家用电冰箱B.传统交通红绿灯控制C.自动流水线D.普通车床3【单选题】(10 分)下列系统属于定值控制系统的为()。
A.自动跟踪雷达B.自动化流水线C.家用空调D.家用微波炉4【单选题】(10 分)下列系统属于随动控制系统的为()。
A.火炮自动跟踪系统B.家用空调器C.自动化流水线D.家用电冰箱5【单选题】(10 分)下列系统属于程序控制系统的为()。
A.传统交通红绿灯控制B.火炮自动跟踪系统C.家用空调器D.普通车床6【单选题】(10 分)()为按照系统给定值信号特点定义的控制系统。
A.连续控制系统B.离散控制系统C.线性控制系统D.随动控制系统7【单选题】(10 分)下列不是对自动控制系统性能的基本要求的是()。
A.准确性B.快速性C.稳定性D.复现性8【单选题】(10 分)下列不是自动控制系统基本方式的是()。
A.开环控制B.复合控制C.闭环控制D.前馈控制9【单选题】(10 分)下列不是自动控制系统的基本组成环节的是()。
A.测量变送器B.控制器C.被控变量D.被控对象10【单选题】(10 分)自动控制系统不稳定的过度过程是()。
A.发散振荡过程B.其余选择都不是C.单调过程D.衰减振荡过程第二章测试1【单选题】(10 分)自动控制系统的数学模型为()。
A.热学方程B.梅森公式C.微分方程、传递函数、动态结构框图、信号流图D.状态方程、差分方程2【单选题】(10 分)以下关于传递函数的描述,的是()。
A.传递函数取决于系统和元件的结构和参数,并与外作用及初始条件有关B.传递函数是一种动态数学模型C.传递函数是复变量的有理真分式函数D.一定的传递函数有一定的零极点分布图与之相对应3【单选题】(10 分)系统的传递函数是由系统的()决定的。
![自动控制理论[刘丁著]课后习题二~八答案解析](https://uimg.taocdn.com/562d104927284b73f242503d.webp)
习题22-1.(1)线性,时变,动态(2)非线性,时变,动态 (3)非线性,定常,动态 (4)非线性,定常,静态 (5)非线性,定常,动态 (6)非线性,定常,静态 2-2.(a )1212)(st e ss s F -+=(b )211)1(1)(sst e s t s F -+-=(c )2121)1)(1()(1st e s t s F s t --+= 2-3.1212221332121(1)(),lim(1),lim(3)134324321111()[],2132s s t tc c s s F s c s c s s s s s s s F s f t e e s s →-→---++=+=+==+=++++++∴=+=+++得到:()()()()1023(2)()1+cos(t)-5*sin(t)111(3)sin cos 222119(4)()8181(5)()12131(6)()()32412t t t tt t t f t f t e t e tt f t e ef t t e f t t e e -------==--+=-==+=-++(4) syms s FF=ilaplace(1/(s^3+21*s^2+120*s+100))运行结果:F =1/81*exp(-t)-1/9*t*exp(-10*t)-1/81*exp(-10*t) (5) syms s FF=ilaplace((s^2+2*s+3)/(s+1)^3) 运行结果:F =t^2*exp(-t)+exp(-t) (6) F=ilaplace((s+2)/(s*(s+3)*(s+1)^2))运行结果:F = 2/3+1/12*exp(-3*t)-1/2*t*exp(-t)-3/4*exp(-t)2-4.(1) ()1()1()tT x t e r t t -=-= ()(1)t Tx t t T er t-=--=(2) 2()tx t - (3) ()1(1)t x t t e -=-+2-5.(a )21212=++crU R U R R R R s(b )1221212+=++crU R R cs R U R R R R cs2-6 (a )211crU R Cs U R Cs+=-,实际上是一个PI 控制器。
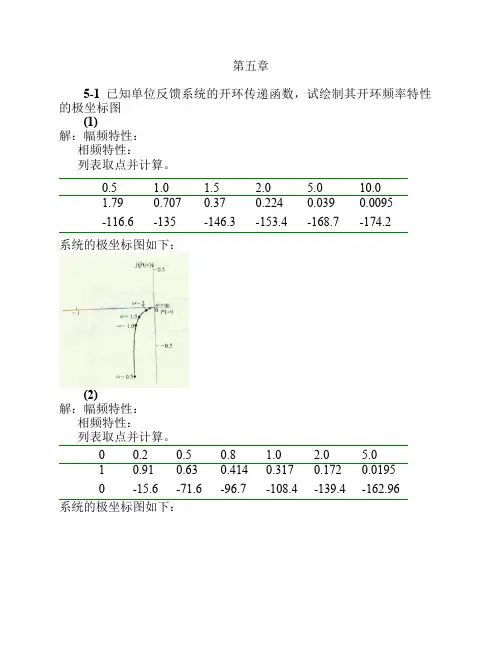
第五章5-1 已知单位反馈系统的开环传递函数,试绘制其开环频率特性的极坐标图(1)解:幅频特性:相频特性:列表取点并计算。
0.5 1.0 1.5 2.0 5.010.01.790.7070.370.2240.0390.0095-116.6-135-146.3-153.4-168.7-174.2系统的极坐标图如下:(2)解:幅频特性:相频特性:列表取点并计算。
00.20.50.8 1.0 2.0 5.010.910.630.4140.3170.1720.01950-15.6-71.6-96.7-108.4-139.4-162.96系统的极坐标图如下:(3)解:幅频特性:相频特性:列表取点并计算。
0.20.30.51254.55 2.74 1.270.3170.0540.0039-105.6-137.6-161-198.4-229.4-253系统的极坐标图如下:(4)解:幅频特性:相频特性:列表取点并计算。
0.20.250.30.50.60.8122.7513.87.86 2.520.530.650.317-195.6-220.6-227.6-251.6-261.6-276.7-288.4系统的极坐标图如下:5-2 试绘制上题中各系统的开环对数频率特性(伯德图)。
(1)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,在处与=20=0相交。
环节的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示:(2)解:伯德图起始为0dB线,的交接频率,斜率下降20dB/dec,变为-20dB/de c。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
系统的伯德图如图所示。
(3)解:系统为Ⅰ型,伯德图起始斜率为-20dB/dec,其延长线在=1处与=20=0相交。
的交接频率,斜率下降20dB/dec,变为-40dB/de c。
的交接频率,斜率下降20dB/dec,变为-60dB/de c。
自动控制理论作业一1 / 20 单选题(5分)正确答案 BA开环控制B随动控制C复合控制D闭环控制2 / 20 单选题(5分)正确答案 AA稳定性B动态特性C稳态特性D瞬态特性3 / 20 单选题(5分)正确答案 DA系统的扰动量影响不大B系统的扰动量大且无法预计C闭环系统不稳定D系统的扰动量可以预计并能进行补偿4 / 20 单选题(5分)正确答案 BA与输入信号有关B只取决于系统结构和元件的参数C闭环系统不稳定D系统的扰动量可以预计并能进行补偿5 / 20 单选题(5分)正确答案 CA经典理论B控制理论C经典控制理论D现代控制理论6 / 20 单选题(5分)正确答案 CAζ=1Bζ=0C0<ζ<1D0≤ζ≤17 / 20 单选题(5分)正确答案 B振荡。
Aζ=1Bζ=0C0<ζ<1D0≤ζ≤18 / 20 单选题(5分)正确答案 D极点位于位于( )。
A虚轴正半轴B实正半轴C虚轴负半轴D实轴负半轴9 / 20 单选题(5分)正确答案 B有根都具有( )。
A实部为正B实部为负C虚部为正D虚部为负10 / 20 单选题(5分)正确答案 BA越大系统的动态特性越好B越大系统的稳态特性越好C越大系统的阻尼越小D越小系统的稳态特性越好11 / 20 单选题(5分)正确答案 D根轨迹是指开环系统某个参数由0变化到∞,( )在s平面上移动的轨迹。
A开环零点B开环极点C闭环零点D闭环极点12 / 20 单选题(5分)正确答案 A,则共轭出现。
所以根轨迹( )。
A对称于实轴B对称于虚轴C位于左半[s]平面D位于右半[s]平面13 / 20 单选题(5分)正确答案 C系统的开环传递函数,则全根轨迹的分支数是( )。
A1B2C3D414 / 20 单选题(5分)正确答案 A已知控制系统的闭环传递函数是,则其根轨迹起始于( )。
AG(s)H(s)的极点BG(s)H(s)的零点C1+G(s)H(s)的极点D1+G(s)H(s)的零点15 / 20 单选题(5分)正确答案 B系统的闭环传递函数是,根轨迹终止于( )。
自动控制理论2022年3月结课考试(1)一、单选题(共30题,60分)1、回路传递函数:回路内前向通道和反馈通道传递函数的()。
(2.0)A、乘积B、复变量SC、变量eD、多变量正确答案: A2、ζ值越小,()响应振荡越强。
(2.0)A、输出B、动态结构图C、静态结构图D、结构正确答案: A3、增加积分环节可提高系统精度等级,增加放大系数可减小()。
采用补偿的方法,则可在保证系统稳定的前提下减小稳态误差。
(2.0)A、结构图B、动态结构图C、静态结构图D、有限误差正确答案: D4、3.频率特性中常用来判断系统稳定性的几何表示有奈氏图和()。
(2.0)A、伯德图B、复变量SC、变量eD、多变量正确答案: A5、单位阶跃响应:系统在单位阶跃信号作用下的()响应.(2.0)A、输出B、线性系统C、非线系统D、非性系统正确答案: A6、由非线性方程所描述的系统称为( )。
(2.0)A、非线性系统B、线性系统C、非线系统D、非性系统正确答案: A7、幅相频率特性曲线又称奈奎斯特曲线,也称()。
(2.0)A、非线性系统B、极坐标图C、非线系统D、非性系统正确答案: B8、传递函数一般为( )的有理分式。
(2.0)A、单变量tB、复变量SC、变量eD、多变量正确答案: B9、传递函数只适用于( )系统。
(2.0)A、线性系统B、非线性系统C、非线定常系统D、线性定常正确答案: D10、对于RLC电路,可以运用电流和电压平衡定律及复阻抗的概念,直接画出系统的( )。
(2.0)A、结构图B、动态结构图C、静态结构图D、结构正确答案: B11、系统正弦信号作用下的()称为系统的频率响应。
(2.0)A、稳态输出B、线性系统C、传递函数D、线性定常正确答案: A12、自动控制系统在复数城中常用的数学模型主要有()和结构图。
(2.0)A、线性系统B、非线性系统C、非线定常系统D、传递函数正确答案: D13、一阶微分环节的频率特性与惯性环节成反比,所以它们的()对称于横轴.(2.0)A、线性系统B、非线性系统C、伯德图D、线性定常正确答案: C14、给定值又称为() :希望被控量趋近的数值又称为规定值。

绪论单元测试1【判断题】(100分)自动控制理论经历了经典控制理论、现代控制理论和近代控制理论三个发展阶段。
A.错B.对第一章测试1【单选题】(10分)下列系统中属于开环控制的为()。
A.家用空调器B.普通车床C.无人驾驶车D.自动跟踪雷达2【单选题】(10分)下列系统属于闭环控制系统的为()。
A.家用电冰箱B.传统交通红绿灯控制C.自动流水线D.普通车床3【单选题】(10分)下列系统属于定值控制系统的为()。
A.自动跟踪雷达B.自动化流水线C.家用空调D.家用微波炉4【单选题】(10分)下列系统属于随动控制系统的为()。
A.火炮自动跟踪系统B.家用空调器C.自动化流水线D.家用电冰箱5【单选题】(10分)下列系统属于程序控制系统的为()。
A.传统交通红绿灯控制B.火炮自动跟踪系统C.家用空调器D.普通车床6【单选题】(10分)()为按照系统给定值信号特点定义的控制系统。
A.连续控制系统B.离散控制系统C.线性控制系统D.随动控制系统7【单选题】(10分)下列不是对自动控制系统性能的基本要求的是()。
A.准确性B.快速性C.稳定性D.复现性8【单选题】(10分)下列不是自动控制系统基本方式的是()。
A.开环控制B.复合控制C.闭环控制D.前馈控制9【单选题】(10分)下列不是自动控制系统的基本组成环节的是()。
A.测量变送器B.控制器C.被控变量D.被控对象10【单选题】(10分)自动控制系统不稳定的过度过程是()。
A.发散振荡过程B.其余选择都不是C.单调过程D.衰减振荡过程第二章测试1【单选题】(10分)自动控制系统的数学模型为()。
A.热学方程B.梅森公式C.微分方程、传递函数、动态结构框图、信号流图D.状态方程、差分方程2【单选题】(10分)以下关于传递函数的描述,的是()。
A.传递函数取决于系统和元件的结构和参数,并与外作用及初始条件有关B.传递函数是一种动态数学模型C.传递函数是复变量的有理真分式函数D.一定的传递函数有一定的零极点分布图与之相对应3【单选题】(10分)系统的传递函数是由系统的()决定的。
自动控制理论陈青课后答案第四版一、单项选择题1.把()的装置称为逆变器。
[单选题] *A.交流电变换为直流电B.交流电压升高或降低C.直流电变换为交流电(正确答案)D.直流电压升高或降低2.当晶闸管电路处于逆变状态时,控制角()。
[单选题] *A.ɑ>90°(正确答案)B.ɑ<90°C.ɑ=90°D.ɑ>60°3.在电枢可逆电路中,晶闸管切换可逆电路适用于()的中小功率可逆传动。
[单选题] *A.几千千瓦以下B.几十千瓦以下(正确答案)C.几千千瓦以上D.几十千瓦以上4.两组晶闸管反并联的电枢可逆电路的优点是()。
[单选题] *A.切换速度慢、控制灵活B.切换速度快、控制不灵活C.切换速度快、控制灵活(正确答案)D.切换速度慢、控制不灵活5.在可逆直流调速电路中,电枢可逆方案适用于()起动、制动和要求瞬态过程尽量()的生产机械上。
[单选题] *A.频繁短(正确答案)B.频繁长C.不频繁长D.不频繁短6.当可逆拖动的电动机正向运行时,正组处于()工作状态,反组处于()状态。
[单选题] *A.逆变阻断B.逆变导通C.整流导通D.整流阻断(正确答案)7.由一组逻辑电路判断控制整流器触发脉冲通道的开发和封锁,这就构成了()可逆调速系统。
[单选题] *A.逻辑环流B.逻辑无环流(正确答案)C.可控环流D.可控无环流8.逻辑保护电路一旦出现()的情况,与非门立即输入低电平,使UR和UF均被相位于“0”,将两组触发器封锁。
[单选题] *A.UR=1. UF=0B.UR=0.UF=0C.UR=0.UF=1D.UR=1.UF=1(正确答案)9.在晶闸管可逆调速系统中,为防止逆变失败,应设置()的保护环节。
[单选题] *A.限制β minB.限制 a minC.限制β min 和 a min(正确答案)D.β min 和 a min 任意限制其中一个10.当可逆拖动的电动机正向制动时,正组处于()状态,反组处于()工作状态。
习题22-1. (1)线性,时变,动态(2)非线性,时变,动态 (3)非线性,定常,动态 (4)非线性,定常,静态 (5)非线性,定常,动态 (6)非线性,定常,静态 2-2. (a )1212)(st e ss s F -+=(b )211)1(1)(sst e s t s F -+-=(c )2121)1)(1()(1st e s t s F s t --+= 2-3.1212221332121(1)(),lim(1),lim(3)134324321111()[],2132s s t tc c s s F s c s c s s s s s s s F s f t e e s s →-→---++=+=+==+=++++++∴=+=+++得到:()()()()1023(2)()1+cos(t)-5*sin(t)111(3)sin cos 222119(4)()8181(5)()12131(6)()()32412t t t tt t t f t f t e t e t t f t e ef t t e f t t e e -------==--+=-==+=-++(4) syms s FF=ilaplace(1/(s^3+21*s^2+120*s+100))运行结果:F =1/81*exp(-t)-1/9*t*exp(-10*t)-1/81*exp(-10*t) (5) syms s FF=ilaplace((s^2+2*s+3)/(s+1)^3) 运行结果:F =t^2*exp(-t)+exp(-t) (6) F=ilaplace((s+2)/(s*(s+3)*(s+1)^2))运行结果:F = 2/3+1/12*exp(-3*t)-1/2*t*exp(-t)-3/4*exp(-t)2-4.(1) ()1()1()tTx t e r t t -=-= ()(1)tT x t t T e r t-=--=(2) 2()tx t - (3) ()1(1)t x t t e -=-+2-5.(a )21212=++crU R U R R R R s(b )1221212+=++crU R R cs R U R R R R cs2-6 (a )211crU R Cs U R Cs+=-,实际上是一个PI 控制器。
《自动控制理论》课程习题集一、单选题1.下列不属于自动控制基本方式的是( B )。
A.开环控制B.随动控制C.复合控制D.闭环控制2.自动控制系统的( A )是系统工作的必要条件。
A.稳定性B.动态特性C.稳态特性D.瞬态特性3.在( D )的情况下应尽量采用开环控制系统。
A. 系统的扰动量影响不大B. 系统的扰动量大且无法预计C. 闭环系统不稳定D. 系统的扰动量可以预计并能进行补偿4.系统的其传递函数( B )。
A. 与输入信号有关B. 只取决于系统结构和元件的参数C. 闭环系统不稳定D. 系统的扰动量可以预计并能进行补偿5.建立在传递函数概念基础上的是( C )。
A. 经典理论B. 控制理论C. 经典控制理论D. 现代控制理论6.构成振荡环节的必要条件是当( C )时。
A. ζ=1B. ζ=0C. 0<ζ<1D. 0≤ζ≤17.当( B )时,输出C(t)等幅自由振荡,称为无阻尼振荡。
A. ζ=1B. ζ=0C. 0<ζ<1D. 0≤ζ≤18.若二阶系统的阶跃响应曲线无超调达到稳态值,则两个极点位于位于( D )。
A. 虚轴正半轴B. 实正半轴C. 虚轴负半轴D. 实轴负半轴9.线性系统稳定的充分必要条件是闭环系统特征方程的所有根都具有( B )。
A. 实部为正B. 实部为负C. 虚部为正D. 虚部为负10.下列说法正确的是:系统的开环增益( B )。
A. 越大系统的动态特性越好B. 越大系统的稳态特性越好C. 越大系统的阻尼越小D. 越小系统的稳态特性越好11.根轨迹是指开环系统某个参数由0变化到∞,( D )在s平面上移动的轨迹。
A. 开环零点B. 开环极点C. 闭环零点D. 闭环极点12.闭环极点若为实数,则位于[s]平面实轴;若为复数,则共轭出现。
所以根轨迹( A )。
A. 对称于实轴B. 对称于虚轴C. 位于左半[s]平面D. 位于右半[s]平面1213. 系统的开环传递函数)4)(2()3)(1()(*0++++=s s s s s K s G ,则全根轨迹的分支数是( C )。
A. 对称于实轴B. 对称于虚轴C. 位于左半[s]平面D. 位于右半[s]平面 13. 系统的开环传递函数)4)(2()3)(1()(*0++++=s s s s s K s G ,则全根轨迹的分支数是( C )。
A .1B .2C .3D .414. 已知控制系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,则其根轨迹起始于( A )。
A . G(s)H(s)的极点 B . G(s)H(s)的零点 C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点15. 系统的闭环传递函数是)()(1)()(s H s G s G s G c +=,根轨迹终止于( B )。
A . G(s)H(s)的极点B . G(s)H(s)的零点C . 1+ G(s)H(s)的极点D . 1+ G(s)H(s)的零点线16. 在设计系统时应使系统幅频特性L(ω)穿越0dB 线的斜率为( A )。
A .-20dB/decB .-40dB/decC .-60dB/decD .-80dB/dec17. 当ω 从−∞ → +∞ 变化时惯性环节的极坐标图为一个( B )。
A .位于第一象限的半圆B .位于第四象限的半圆C .整圆D .不规则曲线18. 设系统的开环幅相频率特性下图所示(P 为开环传递函数右半s平面的极点数),其中闭环系统稳定的是( A )。
A. 图(a)B. 图(b)C. 图(c)D. 图(d)19. 已知开环系统传递函数为)1(10)()(+=s s s H s G ,则系统的相角裕度为( C )。
A .10°B .30°C .45°D .60°20. 某最小相位系统的开环对数幅频特性曲线如下图所示。
则该系统的开环传递函数为( D )。
20-20 ωL(dB) 10(a) p=1 (b) p=1 (c) p=1 (d) p=1由图知存在自振。