基于SPCE061A的液体点滴速度测控装置研究
- 格式:pdf
- 大小:135.88 KB
- 文档页数:4

用凌阳SPCE061A实现的液体点滴速度监控装置・羚 阳・2003年全国大学生电子设计竞赛已经结束。
本文介绍竞赛的F题。
通过凌阳16位单片机SPCE061A实现一个液体点滴速度控制系统,其中包括键盘设置、动态显示、点滴速度检测、储液瓶液面检测以及电机控制、异常情况报警等功能,并且该系统作为一个子系统能够和主系统进行通讯。
从站部分1.系统功能该系统能够完成以下功能,示意图如图1所示。
(1)基本功能①在滴斗处检测点滴速度,并制作一个数显装置,能动态显示点滴速度(滴/分)。
②通过改变h2控制点滴速度,如图1所示;点滴速度可用键盘设定并显示,设定范围为10~200(滴/分),控制误差范围为设定值±10%±1滴。
③调整时间≤3分钟(从改变设定值起到点滴速度基本稳定,能人工读出数据为止)。
④当h1降到警戒值(2~3cm)时,能发出报警信号。
(2)扩展功能①能输出从站号、点滴速度和报警信号;从站号和点滴速度可以任意设定。
②接收主站设定的点滴速度信息并显示。
2.方案设计与论证(1)点滴速度检测 可以选择红外发射检测的原理来实现,我们可以在滴斗壁的一端安装一个红外发射传感器,另一端来接收,当有水滴滴下时,传感器会产生一个跳变信号,通过该信号来计算点滴滴下的数目,以此计算出点滴的速度(滴/分),这里用到的传感器是一种光电开关传感器俗名“15mm”,不需要外接任何电路,三根连线分别是:5V、GND和OUT,使用非常方便。
当电源和地连接好后,可以将输出直接接一个发光二极管,用手在发射和接收之间穿过,就可以看到二极管会亮灭一次。
(2)储液检测电路 可以通过两根单芯电缆线插入储液瓶口内2~3cm处,一端连接5V的电源,另一端接I/O口,并连接一个下拉电阻到地,当液面高于瓶内导体时I/O口为高电平,否则为低电平,参见图2。
需要注意的是,深入水中的两根线一定要注意绝缘好,不能让水沿着线流入电源和I/O口。
(3)电机控制电路 该电路是用来改变h2高度,以此控制点滴的速度,这里我们选用的是永磁异步四相8拍的步进电机,型号为42BYG228,根据电机的正转和反转来控制储液瓶的高度。



摘要:目前,许多医院普通病房患者静脉输液过程中存在输液速度无法人性化监测和调节等问题,设计提出了一套针对不同病人的输液状况进行实时监控并能准确调节液滴速度的装置。
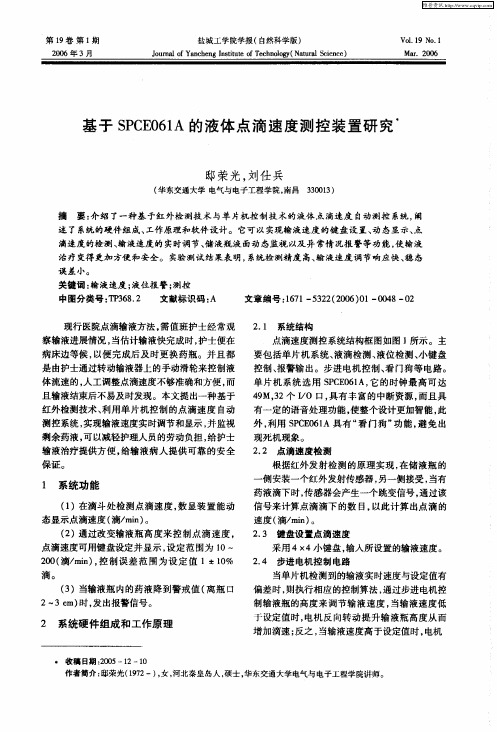
该系统在微改变传统输液形式的前提下,以单片机AT89C51为核心,利用红外对管传感器监测液滴每分钟滴数和液位变化,然后控制步进电机来调节液滴瓶的高低来实现对液滴滴速的控制。
该设计临床实现比较容易,具有较高的实用价值。
关键词:红外对管液滴速度AT89C51步进电机0引言静脉输液是临床治疗中最常用的,临床上一般根据药物和患者的不同情况来配以合适的输液速度,输液速度过快可能导致中毒等不良反应。
常规的临床输液,常用挂瓶输液,依靠眼睛来观察、手动夹具来控制输液速度,这种传统的输液方式并不能精确的控制输液速度,并且工作量大,造成较多的人力资源浪费。
本设计就是为了解决上述的人力资源浪费以及输液速度问题而设计的液体点滴速度自动控制装置。
1自动控制装置硬件设计1.1点滴速度测量采用红外对管来发射和接收点滴信号,采用断续式的工作方式,当液滴滴下时阻挡了红外接收管接收红外线,从而产生一个高电平脉冲信号。
红外对管检测液滴原理图如图1.1所示:图1.1红外对管检测液滴原理图由于红外光产生的光信号较弱,其接收管接收的信号更是十分微弱,相当于毫伏级的电压。
所以必须经过放大电路将其放大到系统能识别的信号。
本设计采用集成运算放大器LM324构成的同向交流放大器。
经过放大电路处理后的信号并不标准,单片机并不能直接识别,因此需要使用电压比较器将不标准的脉冲信号转化为标准的脉冲信号,采用集成电压比较器LM339实现。
1.2液位检测当点滴液位低于警戒线以下时必须发出声光报警。
在这种情况下,关键是如何检测液面高度。
检测方法与液滴测量相同,仍然使用红外对管来发射接收液滴信号。
根据红外接收管接收的光强度的大小,来确定是否达到警戒线水位。
由于红外光通过空气和水的光强不同,因此吸收系数也有不同,当液位高度低于警戒线(离瓶口2-3cm )时,红外对管会接收到信号,即为报警信号,此时蜂鸣器报警。
F6设计题目:液体点滴速度监控装置参赛学校:山东农业大学参赛学生:王涛李晓军于伯建2003年全国大学生电子设计大赛说明书2003年9月17日设计题目:液体点滴速度监控装置一、摘要本系统采用分布式微机控制系统,通过调整输液瓶的高度来精确控制最多可达16个输液器的点滴速度。
系统采用主从式结构,都采用89s52作为CPU。
从机通过光敏元件测定点滴速度,并通过步进电机调整输液瓶高度,构成了一个闭环控制系统。
可通过键盘设定所需点滴速度,设定范围可达20~150滴/分,调整误差≤ 5%,调整时间≤2分钟。
并可动态显示实时点滴速度。
当液面下降到2~3cm的警戒值时,可进行声光报警。
主从站之间通过RS-485总线构成串行通讯网络。
主站可对16个从站进行定点或巡回监测,查询各从站的实时状态,并可显示其从站号和点滴速度,并可远程设定各从站的点滴速度,当收到从站发来的报警信号后,能声光报警并显示相应的从站号,并可手动方式解除报警。
该系统布局合理,运行平稳,控制精度较高,完全达到了题目基本部分的要求,并基本实现了发挥部分要求。
二、系统方案确定1、总方案:分析题目要求,系统为一个主从式测控系统。
由通讯网络把主站和多个从站连成一个系统。
通讯网络可采用RS-232或RS-485等接口组成。
测控从站的功能可有多种方案实现,但一般都都由控制单元、执行机构和检测单元三部分组成。
下面具体论述分析一下各个部分的方案确定。
2、通讯方案的确定通讯网络可选用RS-232或RS-485。
RS-232系统的通讯距离一般小于15米,而RS-485的通讯距离可达1000多米。
考虑到本系统模拟的医院病房的实际情况,15米不能满足要求,故采用了RS-485系统3、执行机构方案的确定小型执行机构的驱动元件一般选择直流电机或步进电机。
其中直流电机使用方便,价格便宜,但运动精度较低,难以实现精确的位置控制。
如用直流电机调整输液瓶的高度,将难以控制其精确位置,系统稳定性较差,较难达到题目的要求。
基于SPCE061A智能磁性液体表观密度仪控制系统
王蔚;李学慧
【期刊名称】《实验室研究与探索》
【年(卷),期】2011(030)001
【摘要】介绍以SPCE061A单片机为控制器的磁性液体表观密度仪控制系统,用以满足工业设计中复杂的数据采集需要.该系统由SPCE061A单片机控制,通过力敏传感器单元与PC系统通信,设计数据处理方法并编写相应的计算程序和交互式的窗体界面,用户可根据实际测量要求对实测软件进行设置,从而实现对实验数据读取、处理和曲线绘制、显示、打印、保存等功能.同时,用户可远程登录计算机,进入系统设置实测软件,远程进行数据采集,并能得到实时的采集结果,故系统具有扩展性.该系统控制简单、成本低,适用于教学和科研中的数据采集.
【总页数】3页(P11-13)
【作者】王蔚;李学慧
【作者单位】大连大学,物理科学与技术学院,辽宁,大连,116622;大连大学,物理科学与技术学院,辽宁,大连,116622
【正文语种】中文
【中图分类】TP274.2
【相关文献】
1.基于SPCE061A的智能轮椅避障控制系统的设计 [J], 牛凤英;张华;刘继忠;吴学沛
2.基于SPCE061A的智能轮椅控制系统硬件设计 [J], 郝敏钗
3.基于SPCE061A的舞台灯智能控制系统设计 [J], 易金桥;孙先波;谭建军;艾青
4.基于凌阳SPCE061A的智能小车语音控制系统 [J], 李新梅
5.基于SPCE061A的空调智能控制系统的设计 [J], 赵强
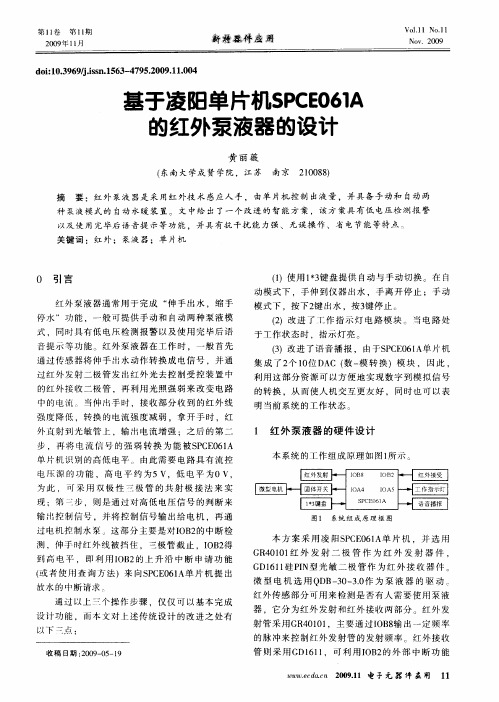
因版权原因,仅展示原文概要,查看原文内容请购买。