0控制工程基础-总结
- 格式:ppt
- 大小:1.99 MB
- 文档页数:5
自动化课程总结模板控制工程基础自动化课程总结模板─ 控制工程基础一、引言自动化技术在现代工程领域中起着至关重要的作用。
而控制工程作为自动化技术的核心领域之一,在我所学习的自动化课程中占据了重要的地位。
本文将对我在控制工程基础课程学习中的心得体会进行总结,从课程内容、教学模式以及学习收获三个方面进行阐述。
二、课程内容控制工程基础课程将我们引入到了控制系统的基本概念和原理之中。
在课程学习过程中,我们深入研究了控制系统的组成结构、信号传输原理、控制器设计方法等内容。
通过学习,我对传感器、执行器、控制算法等方面的知识有了更加全面的了解,并且深入了解了控制系统的数学模型及其仿真方法。
三、教学模式在控制工程基础课程中,教学模式灵活多样,使得我们能够充分参与到实践中。
老师采用了课堂讲授、案例分析、实验操作等多种形式进行教学,使得我们既能够理论上掌握知识,又能够通过实验实际操作来加深理解。
这种教学模式让我在学习过程中感到积极性和主动性,对课程内容的学习更加深入和扎实。
四、学习收获通过学习控制工程基础课程,我不仅仅学到了理论知识,更重要的是培养了自己的实际动手能力和问题解决能力。
在实验操作过程中,我学会了使用控制系统仿真软件进行实践操作,并且能够熟练应用所学知识解决实际问题。
这种能力的培养对于我未来的工程实践具有非常重要的意义。
五、总结控制工程基础课程为我打下了自动化领域学习的基础,使我对自动化技术有了更深入的了解。
在课程学习中,我通过掌握了控制系统的基本概念和原理,提升了动手能力和问题解决能力。
这些收获将对我未来的学习和工作产生积极的影响。
六、展望自动化技术的迅速发展让我充满了对未来的期待。
希望可以在以后的学习中继续探索更深入的自动控制理论,提升自己在控制工程领域的技能水平。
相信通过持续的努力和不断的学习,我能够成为一名优秀的自动化工程师。
总结自动化课程的学习是我在大学期间至关重要的一门课程。
通过对控制工程基础课程的总结,我深刻体会到了掌握自动化技术对于未来工程领域的重要性。
控制工程基础实验报告控制工程基础实验报告引言:控制工程是一门涉及自动化、电子、计算机等多个学科的交叉学科,其实验是培养学生动手能力和实践能力的重要环节。
本篇文章将以控制工程基础实验为主题,探讨实验的目的、过程和结果等方面。
实验目的:控制工程基础实验的目的是让学生通过实践了解控制系统的基本原理和方法,培养其分析和解决问题的能力。
通过实验,学生可以掌握闭环控制系统的设计与调试技巧,加深对控制理论的理解。
实验内容:本次实验的内容是设计一个简单的温度控制系统。
系统由温度传感器、控制器和加热器组成。
温度传感器采集环境温度,控制器根据设定的温度值来控制加热器的工作状态,以维持温度在设定值附近。
实验步骤:1. 搭建实验平台:将温度传感器、控制器和加热器按照实验要求连接起来,确保电路正常工作。
2. 设计控制算法:根据控制系统的要求,设计合适的控制算法。
可以采用比例控制、积分控制或者PID控制等方法。
3. 参数调试:根据实验平台和控制算法的特点,调试控制器的参数,使系统能够快速、稳定地响应设定值的变化。
4. 实验数据采集:通过实验平台上的数据采集器,记录系统的输入和输出数据,以便后续分析和评估。
实验结果:经过实验,我们得到了一组温度控制系统的数据。
通过对这些数据的分析,我们可以评估系统的控制性能和稳定性。
在实验中,我们使用PID控制算法,经过参数调试,得到了较好的控制效果。
系统能够在设定值附近稳定工作,并且对设定值的变化能够快速响应。
实验总结:通过这次实验,我们深入了解了控制工程的基本原理和方法。
实践中遇到的问题和挑战,锻炼了我们的动手能力和解决问题的能力。
实验结果表明,合适的控制算法和参数调试是实现良好控制效果的关键。
控制工程实验的重要性不言而喻,它不仅是理论学习的延伸,更是培养学生实践能力的重要途径。
结语:控制工程基础实验是掌握控制工程理论和方法的重要环节。
通过实践,学生能够更好地理解和应用所学知识,提高解决实际问题的能力。
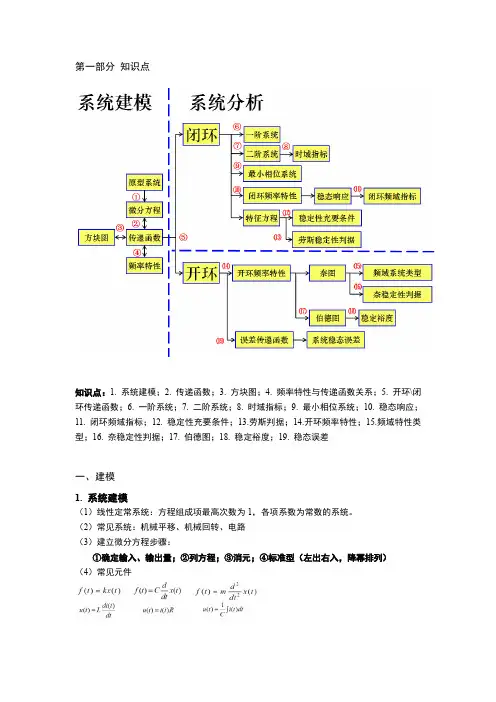
控制工程基础应掌握的重要知识点控制工程基础应掌握的重要知识点包括控制的本质、自动控制系统的重要信号、自动控制的分类、控制系统的基本要求等。
其中,控制的本质是检测偏差并纠正,自动控制系统的重要信号包括输入信号、输出信号、反馈信号、偏差信号等。
自动控制按有无反馈作用分为开环控制与闭环控制,按给定量的运动规律分为恒值调节系统、程序控制系统与随动控制系统,按系统线性特性分为线性系统与非线性系统,按系统信号类型分为连续控制系统与离散控制系统。
对控制系统的基本要求是稳定性、准确性、快速性。
求机械系统与电路的微分方程与传递函数可以使用拉普拉斯变换。
拉普拉斯变换可以将时域信号转换为复频域信号,常见的拉普拉斯变换公式包括单位阶跃信号、单位冲激信号、正弦信号、指数信号等。
在零初始条件下,可以使用拉普拉斯变换求解微分方程。
传递函数是在零初始条件下将微分方程作拉普拉斯变换,进而运算而来。
传递函数与微分方程是等价的,适合线性定常系统。
典型环节传递函数包括比例环节、惯性环节、积分环节、微分环节、一阶微分环节、二阶微分环节、振荡环节等。
传递函数框图的化简可以使用闭环传递函数、开环传递函数、误差传递函数等进行计算。
闭环传递函数是输出信号与输入信号间的传递函数,误差传递函数又称偏差传递函数,是偏差信号与输入信号间的传递函数。
系统的特征方程是令系统闭环传递函数分母等于零而得。
特征方程的根就是系统的极点。
最后一段文字中出现了格式错误和明显问题的段落,应该删除。
剩下的内容已经进行了小幅度改写,使其更加易读。
t)指系统在稳定状态下输出与期望输入之间的差值。
常用的稳态误差求法有以下两种:1.通过系统传递函数G(S)求出开环传递函数A(S),利用稳态误差公式e(t) = lim s→0 sE(S)/A(S)求出稳态误差。
其中E(S)为期望输入的拉氏变换,A(S)为开环传递函数的拉氏变换。
2.利用系统的单位阶跃响应c(t)求出系统的稳态误差。
控制工程基础知识点【篇一:控制工程基础知识点】◎控制论与系统论、信息论的发展紧密结合,使控制论的基本概念和方法被应用于各个具体科学领域其研究的对象从人和机器扩展到环境、生态、社会、军事、经济等许多方面,,并将控制论向应用科学方面迅速发展。
其分支科学主要有:工程控制论、生物控制论、社会控制论和经济控制论、大系统理论、人工智能等。
◎闭环控制系统主要由给定环节、比较环节、运算放大环节、执行◎由此可见,系续稳定的充分必要条件是:系统特征方程的根全部具有负实部。
系统的特征根就是系统闭环传递函数的极点,因此,系统稳定的充分必要条件还可以表述为系统闭环传递函数的极点全部位于〔s〕平面的左半平面线性定常系统对正弦输入的稳态响应被称为频率响应,该响应的频率与输入信号的频率相同,幅值和相位相对于输入信号随频率 w 的变化而变化,反映这种变化特性的表达式 x (? ) 和-arctantw 称系统的频率特性,它与系统传递函数的关系将 g(s)中的s 用 jw 歹取代, g(jw)即为系统的频率特性。
环节、被控对象、检测环节(反馈环节)组成◎开环控制反馈及其类型:内反馈、外反馈、正反馈、负反馈。
◎1、从数学角度来看,拉氏变换方法是求解常系数线性微分方程的工具。
可以分别将“微分”与“积分”运算转换成“乘法”和“除法”运算,即把微分、积分方程转换为代数方程。
对于指数函数、超越函数以及某些非周期性的具有不连续点的函数,用古典方法求解比较烦琐,经拉氏变换可转换为简单的初等函数,就很简便。
2、当求解控制系统输入输出微分方程时,求解的过程得到简化,可以同时获得控制系统的瞬态分量和稳态分量。
3、拉氏变换可把时域中的两个函数的卷积运算转换为复频域中两函数的乘法运算。
在此基础上,建立了控制系统传递函数的概念,这一重要概念的应用为研究控制系统的传输问题提供了许多方便。
◎描述系统的输入输出变量以及系统内部各变量之间的数学表达式称为系统的数学模型,各变量间的关系通常用微分方程等数学表达式来描述。
总结●研究对象:系统●研究内容:系统的“动态和稳态”特性●研究问题的方法:相似系统的功能模拟●解决的问题:控制系统的稳、准、快特性第一章绪论第一节概述第二节控制系统的基本概念●控制系统的基本工作原理●反馈●反馈控制原理、●反馈控制系统●输出量●输入量●闭环控制系统的基本组成:控制器(控制装置)、被控对象●按是否存在反馈分为:开环控制系统、闭环控制系统(反馈控制系统)、复合控制系统●闭环控制系统的基本组成:控制器(控制装置)、被控对象第三节控制系统的基本类型●按输入量和输出量的运动规律分类恒值控制系统程序控制系统随动系统●按系统的控制特性分类连续控制系统离散控制系统对控制系统的基本要求:稳定性要求、准确性要求、快速性要求。
第二章控制系统的数学模型微分方程拉氏变换传递函数:1、传递函数的定义(P32)、求取方法、主要特点(零点、极点的计算);2、典型环节的传递函数形式;3、函数方框图的等效变换:基本等效变换法则(串联法则、并联法则、反馈法则;注意比较点、引出点之间不要换位)、梅森公式;传递函数:4、反馈控制系统传递函数的求取:开环传递函数、闭环传递函数、偏差传递函数(定义、求取方法)第三章频率特性频率特性频率特性、频率响应的定义、求取方法;幅频特性、相频特性、实频特性、虚频特性;幅相频率特性图——奈奎斯特(Nyquist)图对数频率特性图——波德(Bode)图最小相位系统由Bode图确定系统的频率特性、传递函数第四章系统的稳定性分析充要条件:系统特征方程只有左根。
代数稳定性判据(劳斯-霍尔维茨)频率稳定性判据(奈奎斯特)对数频率稳定性判据(波德)控制系统的相对稳定性(幅值裕量和相位裕量计算及在两张图上的标注)第五章时间响应及稳态误差分析一阶和二阶系统的时间响应(快速性)二阶系统的性能指标分析(快速性及过渡过程品质)稳态误差(准确性)ζ—阻尼比,δ=ζωn—衰减系数。
二阶系统的时间响应的性能指标(快速性)())(lim lim 0s sE t e e s t ss →∞→==(5-59) ()0lim lim ()ss t s t s s εεε→∞→==(5-60)第六章控制系统的综合与校正按照在系统内的联接方式分:串联校正并联校正(反馈校正、顺馈校正)按照串联校正特性分相位超前校正环节相位滞后校正环节相位滞后超前校正环节按照实现校正的物理作用来分电气的、机械的、液压的、气动的等。
控制工程基础课程内容总结控制工程基础课程内容总结一.控制、控制系统的一般概念1.反馈(闭环)控制原理概念:基于负反馈基础上的检测偏差用以纠正偏差的控制原理(P4) 控制系统的工作原理:(P4)a.通过测量元件检测输出信号的实际值b.将实际值与输入信号进行比较得出偏差信号。
c.利用偏差信号产生的控制调节作用去消除偏差。
控制系统的基本组成和术语控制目标、控制系统、控制结果三部分组成;(P2)信号、反馈、控制是控制工程的三个要素。
(P5)反馈是把取出输出信号送回到输入端,并与出入信号进行比较产生偏差信号的过程。
(P4)负反馈:反馈的信号是与输入信号相减,时产生的偏差越来越小。
正反馈:反之即得控制过程的物理本质:任何控制系统的控制过程都是一种信息处理使能量(或物质、或信息)按预定的规律转移、传递的过程。
(P6)2.基本控制策略:开环控制、闭环控制、复合控制(P6—P7)如果系统只是根据输入信号和干扰信号进行控制,而输入端和输出端之间不存在反馈回路,输出信号在整个控制过程中对系统的控制不产生任何影响,这样的控制方式称为开环控制。
(数控机床的进给运动)如果系统的输入端和输出端之间存在反馈回路,输出量对控制过程产生直接影响,这种系统称为闭环控制系统。
同时采用闭环控制和开环控制的控制方式称为复合控制。
3.线性系统的重要性质:叠加原理(P10)控制系统的基本要求:稳定,快速,精确,健壮。
(P11)4.瞬态响应和稳态响应;零输入响应、零状态响应(P70)二.系统数学模型及其建模何谓数学建模?(P15)何谓负载效应?(P21)何谓线性化?(P19)如何线性化?(P19—P20)(一).传递函数1.传递函数的概念(P35)与性质(P36)零点、极点、特征多项式和特征方程(P36)2.典型环节的传递函数(P38—P46)3.控制系统的传递函数开环传递函数(P56),开环增益(P57),系统型号(P96)主令输入、扰动输入下的闭环传递函数(P57)主令输入、扰动输入下的偏差、误差传递函数(P57—P58)4.函数方块图的绘制、等效变换和简化运算(P46—P55)三.系统的结构特性和性能分析(一).线性系统的稳定性分析1.稳定性概念和定义(P75)2.系统稳定的必要充分条件(P76)3.时域判据(劳斯)和频域判据(乃氏、对数)及其应用(P76—P81)(二).系统稳态误差分析1.偏差与误差的关系(P94):稳态误差的概念与定义(P94)2.稳态误差与系统结构、出入信号性质的关系(P95)3.稳态误差的计算方法、稳态误差系数概念(P95)4.扰动作用下的稳态误差(P100)5.减小稳态误差的措施(P102)(三). 频率特性1.频率特性的概念(P110)、求取方法(P112)、物理意义(P111)和图解方法(P112—P117重点)2.正弦输入下系统稳态响应(频率响应)的求取(P110)3.幅频特性、相频特性的物理意义(P109)4.典型环节、开环频率特性的图解方法(P117—P129)(四).系统动态性能分析1.无阻尼自然振动频率、阻尼比与动态性能的关系(P84—P88)2.时域性能指标与性能评价(P88—P89)3.开环频域性能指标(P154)、闭环频域性能指标(P151)与性能评价4.时域指标与频域指标的关系(P150)在系统分析中,要紧紧抓住系统结构及其参数与极点之间,极点与系统性能之间的关系!四.系统综合与校正1.系统校正的物理实质实质是改变系统闭环极点的数量或极点位置的配置2.开环增益校正、局部反馈校正对系统性能的影响开环增益校正:提高增益改善了系统的稳态性能和快速性局部反馈校正:用反馈校正装置包围未校正系统中对系统动态特性有不利影响的环节,形成一个局部反馈系统,消弱了元件特性的不稳定性对整个系统的影响。
控制工程基础知识点【篇一:控制工程基础知识点】◎控制论与系统论、信息论的发展紧密结合,使控制论的基本概念和方法被应用于各个具体科学领域其研究的对象从人和机器扩展到环境、生态、社会、军事、经济等许多方面,,并将控制论向应用科学方面迅速发展。
其分支科学主要有:工程控制论、生物控制论、社会控制论和经济控制论、大系统理论、人工智能等。
◎闭环控制系统主要由给定环节、比较环节、运算放大环节、执行◎由此可见,系续稳定的充分必要条件是:系统特征方程的根全部具有负实部。
系统的特征根就是系统闭环传递函数的极点,因此,系统稳定的充分必要条件还可以表述为系统闭环传递函数的极点全部位于〔s〕平面的左半平面线性定常系统对正弦输入的稳态响应被称为频率响应,该响应的频率与输入信号的频率相同,幅值和相位相对于输入信号随频率 w 的变化而变化,反映这种变化特性的表达式 x (? ) 和-arctantw 称系统的频率特性,它与系统传递函数的关系将 g(s)中的s 用 jw 歹取代, g(jw)即为系统的频率特性。
环节、被控对象、检测环节(反馈环节)组成◎开环控制反馈及其类型:内反馈、外反馈、正反馈、负反馈。
◎1、从数学角度来看,拉氏变换方法是求解常系数线性微分方程的工具。
可以分别将“微分”与“积分”运算转换成“乘法”和“除法”运算,即把微分、积分方程转换为代数方程。
对于指数函数、超越函数以及某些非周期性的具有不连续点的函数,用古典方法求解比较烦琐,经拉氏变换可转换为简单的初等函数,就很简便。
2、当求解控制系统输入输出微分方程时,求解的过程得到简化,可以同时获得控制系统的瞬态分量和稳态分量。
3、拉氏变换可把时域中的两个函数的卷积运算转换为复频域中两函数的乘法运算。
在此基础上,建立了控制系统传递函数的概念,这一重要概念的应用为研究控制系统的传输问题提供了许多方便。
◎描述系统的输入输出变量以及系统内部各变量之间的数学表达式称为系统的数学模型,各变量间的关系通常用微分方程等数学表达式来描述。
控制工程基础知识点总结
嘿,朋友们!今天咱来聊聊控制工程基础那些超重要的知识点呀!
先来说说反馈控制,这就好比你走路的时候,眼睛看着前方,然后根据看到的情况不断调整自己的步伐,让自己走得稳稳当当。
比如说你开车吧,你通过观察车速和道路情况来调整油门和刹车,这不就是反馈控制嘛!
系统的稳定性也很关键呀!想象一下,一个摇摇晃晃随时要倒的积木塔和一个稳稳站立的积木塔,你更喜欢哪个呢?这就像一个系统,如果不稳定,那可就容易出大乱子啦!比如一架飞机的控制系统不稳定,那多吓人啊!
再说说时域分析,它可以告诉我们系统的响应速度有多快。
就好像跑步比赛,谁能更快地冲到终点。
比如一部电梯,从一楼到顶楼,用时短就说明它的时域性能好呀!
还有频域分析呢,就如同不同的音乐频率,有高有低,各有特色。
一个音响系统对不同频率声音的处理能力,就能体现它的频域特性嘛!
控制工程的知识点那可真是多如牛毛呀,但只要咱认真去理解,就会发现它们都超有意思的!不是吗?这些知识点就像是我们手中的工具,掌握得
好,就能让各种系统乖乖听话,为我们服务呀!我觉得控制工程基础真的超重要,学好了它,我们就像是拥有了神奇的魔法棒,可以让各种复杂的系统变得井井有条,是不是很棒呢!。
控制工程基础简答知识点总结控制工程,听起来是不是有点高大上,有点让人摸不着头脑?其实啊,它就像我们生活中的导航系统,指引着各种设备和系统精准运行。
先来说说反馈控制。
这就好比你骑自行车,眼睛看到前方的路有点歪,手就自动调整方向,这就是反馈。
反馈控制能让系统的输出不断与期望的目标进行比较,然后做出调整,保证系统稳定运行。
你想想,如果没有这个反馈,那自行车还不得骑得歪七扭八?再讲讲开环控制。
这就像你按照预定的路线去旅行,不管路上遇到啥情况,都不改变计划。
虽然简单直接,但要是遇到突发状况,可就容易出问题啦!还有控制系统的稳定性。
这可太重要啦!就像盖房子,地基不稳,房子能结实吗?一个不稳定的控制系统,那可就乱套了,输出可能会像没头的苍蝇一样到处乱撞。
说到控制系统的性能指标,这就好比衡量一个运动员的表现。
响应速度快不快?准确性高不高?是不是能抵抗外界的干扰?就像跑步比赛,谁能快速又准确地到达终点,谁就是赢家。
而系统的数学模型,那可是控制系统的“密码本”。
通过它,我们能深入了解系统的内在规律,就像了解一个人的性格一样。
控制工程中的时域分析法,就像是给系统做“体检”,直接观察系统在时间上的响应。
频域分析法呢,则像是用“望远镜”从另一个角度观察系统的特性。
你说,控制工程是不是很有趣?它在工业生产、航空航天、医疗设备等领域都发挥着巨大的作用。
没有它,那些精密的机器怎么能乖乖听话工作呢?所以啊,掌握控制工程的基础简答知识点,就像是掌握了一把神奇的钥匙,能打开各种复杂系统的奥秘之门。
咱们可不能小瞧这些知识点,说不定哪天就能派上大用场呢!。
控制工程基础实训心得体会在控制工程基础实训中,我获得了很多宝贵的经验和知识,这让我对控制工程的理论知识有了更加深入和实际的理解。
以下是我的心得体会。
首先,实训让我更加了解了控制工程的基本原理和方法。
在实训中,我学习了PID控制器、信号采集和处理、控制系统仿真等内容。
通过实际动手操作和实验验证,我更加清晰地认识到PID控制器在实际控制系统中的重要性。
在实验中,我根据不同的控制对象和要求,调整PID控制器的参数,观察输出结果的变化。
通过这样的实际操作,我更加深入地了解了PID控制器的工作原理和参数调节的方法。
其次,实训培养了我解决问题和团队合作的能力。
在实训中,我们通常是以小组的形式进行实验。
在实验过程中,我们会遇到各种各样的问题,比如实验设备的故障、采样数据的异常等。
这时,我们需要迅速找到问题的原因,并采取相应的解决方案。
有时候,一个人的力量是有限的,需要和团队成员一起合作解决问题。
通过这样的实践,我学会了更好地与他人合作,培养了解决问题的能力。
另外,实训增强了我的实际操作和实验设计能力。
在实训中,我们需要通过实际操作来验证控制工程的理论知识。
这个过程需要我们具备一定的操作技巧和实验设计能力。
在实训过程中,我学会了正确使用实验设备、合理设计实验方案,并通过实验数据的采集和处理,得出正确的结论。
这些经验和技能对于将来从事控制工程实际应用是非常重要的。
最后,实训让我对控制工程的未来发展有了更清晰的认识。
通过实训,我了解到了当前控制工程的发展趋势和前沿技术。
比如,人工智能在控制工程中的应用、自动化设备与工业互联网的结合等。
这些新技术和新方法对于提高控制工程的智能化、自动化水平具有重要意义。
实训让我认识到,未来的控制工程将更加注重数据分析和算法优化,对于掌握这些新技术,我需要不断学习和实践。
总而言之,通过控制工程基础实训,我对控制工程的理论知识有了更深入和实际的理解,提高了解决问题和团队合作的能力,培养了实际操作和实验设计能力,并对控制工程的未来发展有了更清晰的认识。
控制工程基础知识点总结
嗨呀,今儿个咱就来好好唠唠这控制工程基础的知识点!
先来说说控制系统吧,就好比一辆汽车,发动机就是控制系统的核心呀。
比如说你开车的时候,踩油门让车速变快,这就是你给系统输入了一个信号,然后车子根据这个信号做出反应。
这不就跟控制系统一个道理嘛!
反馈控制也是超重要的呢!想象一下,你在射箭,你得不断根据箭的落点来调整自己的姿势和力度,这就是反馈呀。
就像在一个大工厂里,通过各种传感器收集信息,然后根据这些反馈来调整生产过程,让一切都在掌控之中!
还有开环控制,哎,这就像你闭着眼睛扔飞镖,可不知道扔得准不准。
在一些简单的情况下,开环控制就能搞定,但要是要求高一点,那还是得靠反馈控制呀。
稳定性呢,就跟盖房子一样,要是根基不稳,那房子不就摇摇欲坠啦?控制系统也得稳定,不然一会儿好一会儿坏的,可不得乱套嘛。
咱再聊聊系统的模型。
这可是个很关键的东西,就像给系统画了一幅画像。
通过模型,咱能更好地理解系统的行为。
比如说,研究一个电路系统,建立模型之后就能清楚知道电流电压咋变化的啦。
控制工程基础知识点那可真是多了去了,每一个都很重要嘞!咱可得好好掌握呀,这对咱以后搞工程、搞设计那可都是宝贝呀!哥们儿,你说是不是这么个理儿?咱可得把这些知识点都装进脑袋里,让咱在这控制工程的道路上越走越顺,越走越远呀!
我的观点结论就是:控制工程基础知识点无比重要,掌握了它们,我们才能在相关领域游刃有余!。
控制工程基础知识点总结
嘿,朋友们!今天咱就来好好唠唠这控制工程基础知识点。
咱先说说反馈控制吧!就好比你玩射箭,你每一箭射出去,都会看看中没中靶心,这就是在获取反馈。
然后根据这个反馈,去调整你下一次射箭的姿势和力度,对吧?比如说你第一箭射偏了,那下次你就会调整姿势,让箭更接近靶心,这就是反馈控制呀!
再说说这控制系统的稳定性。
你想想,你骑自行车的时候,如果车子摇摇晃晃,你是不是很难骑得稳呀?控制系统也是一样,如果不稳定,那可就麻烦啦!它就好像是一艘在海上颠簸的小船,你怎么能放心呢?
还有系统的响应速度,哎呀呀,这可太重要啦!你叫一个朋友来帮你拿东西,他要是磨蹭半天不来,你是不是会着急呀?控制系统也是这样,如果它响应速度太慢,那可不行!
系统的精度就好像是裁缝做衣服,尺寸得精确呀,不然做出来的衣服不合身,多难看!
总之,控制工程的这些知识点就像是我们生活中的各种小细节,都很重要呢!每一个都不能小瞧呀!我们在学习和工作中都会用到这些知识,只有把它们掌握好,我们才能让事情变得更顺利,不是吗?控制工程基础知识点真的是超级有用,一定要好好学呀!
我的观点就是:控制工程基础知识点是非常关键的,我们必须认真对待,深入理解,才能在相关领域更好地发挥作用,取得成功!。