(完整版)数字PID及其算法
- 格式:doc
- 大小:4.33 MB
- 文档页数:10
pid算法的原理和算法摘要:I.引言- 简述pid 算法在控制领域的重要性II.pid 算法的定义和公式- 定义pid 算法- 公式说明III.pid 算法的原理- 比例控制- 积分控制- 微分控制IV.pid 算法的应用- 实际应用场景- 优点和局限性V.pid 算法的参数调整- 参数对控制效果的影响- 参数调整方法VI.总结- 总结pid 算法的原理和应用正文:I.引言在控制领域,pid 算法是最常用、最基础的算法之一。
它广泛应用于各种工业控制、机器人控制、航天航空等领域,对于提高系统的稳定性和精度起到了至关重要的作用。
本文将详细介绍pid 算法的原理和应用。
II.pid 算法的定义和公式pid 算法,即比例、积分、微分控制算法,是一种基于偏差信号的控制算法。
它的公式可以表示为:U(t) = K_p * e(t) + K_i * ∫e(t)dt + K_d * de(t)/dt其中,U(t) 为控制输出,e(t) 为偏差信号,K_p、K_i、K_d 为比例、积分、微分控制器的系数。
III.pid 算法的原理pid 算法通过比例、积分、微分三个环节对系统进行控制。
具体原理如下:1.比例控制:控制器的输出与偏差信号成正比,比例系数K_p 为比例增益。
比例控制可以迅速减小偏差,但很难完全消除。
2.积分控制:控制器的输出与偏差信号的积分成正比,积分时间常数K_i 为积分增益。
积分控制可以消除偏差,但可能会导致超调和震荡。
3.微分控制:控制器的输出与偏差信号的微分成正比,微分时间常数K_d 为微分增益。
微分控制可以预测偏差变化趋势,减小超调和震荡。
IV.pid 算法的应用pid 算法在各种领域都有广泛应用,如工业控制、机器人控制、航天航空等。
例如,在温度控制系统中,pid 算法可以实现对温度的高精度控制,提高产品的质量和生产效率。
V.pid 算法的参数调整pid 算法的控制效果受到参数的影响。
合适的参数可以提高控制效果,不合适的参数可能导致系统失稳或震荡。
第四章控制算法与策略按偏差的比例、积分和微分进行控制的控制器(简称为PID控制器、也称PID 调节器),是过程控制系统中技术成熟、应用最为广泛的一种控制器。
它的算法简单,参数少,易于调整,并已经派生出各种改进算法。
特别在工业过程控制中,有些控制对象的精确数学模型难以建立,系统的参数不容易确定,运用控制理论分析综合要耗费很大代价,却不能得到预期的效果。
所以人们往往采用PID控制器,根据经验进行在线整定,一般都可以达到控制要求。
随着计算机特别是微机技术的发展,PID控制算法已能用微机简单实现。
由于软件系统的灵活性,PID算法可以得到修正而更加完善[14]。
在本章中,将着重介绍基于数字PID控制算法的系统的控制策略。
4.1采用周期T的选择采样周期T在微机控制系统中是一个重要参数,它的选取应保证系统采样不失真的要求,而又受到系统硬件性能的限制。
采样定理给出了采样频率的下限,据此采样频率应满足,①'2①,其中①是原来信号的最高频率。
从控制性能Smm来考虑,采样频率应尽可能的高,但采样频率越高,对微机的运行速度要求越高,存储容量要求越大,微机的工作时间和工作量随之增加。
另外,当采样频率提高到一定程度后,对系统性能的改善已不明显[14]。
因此采样频率即采样周期的选择必须综合考虑下列诸因素:(1)作用于系统的扰动信号频率。
扰动频率越高,则采样频率也越高,即采样周期越小。
(2)对象的动态特性。
采样周期应比对象的时间参数小得多,否则采样信号无法反映瞬变过程。
(3)执行器的响应速度。
如果执行器的响应速度比较缓慢,那么过短的采样周期和控制周期将失去意义。
(4)对象的精度要求。
在计算机速度允许的情况下,采样周期越短,系统调节的品质越好。
(5)测量控制回路数。
如果控制回路数多,计算量大,则采样周期T越长,否则越小。
(6)控制算法的类型。
当采用PID算式时,积分作用和微分作用与采样周期T的选择有关。
选择采样周期T太小,将使微分积分作用不明显。
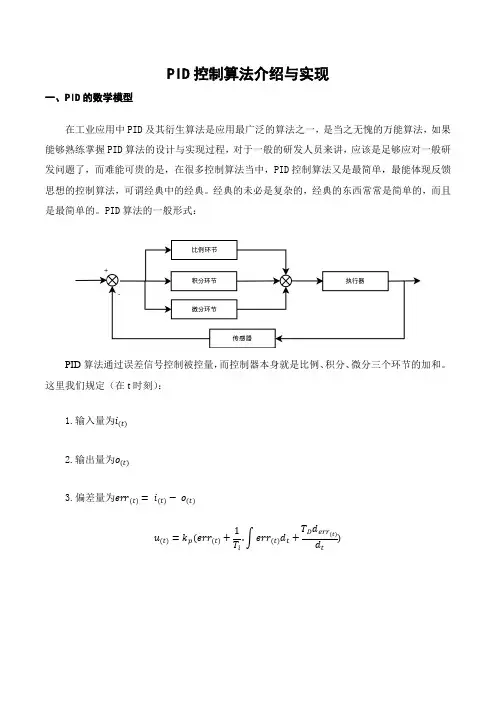
PID控制算法介绍与实现一、PID的数学模型在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在很多控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。
经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的。
PID算法的一般形式:PID算法通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。
这里我们规定(在t时刻):1.输入量为i(t)2.输出量为o(t)3.偏差量为err(t)=i(t)− o(t)u(t)=k p(err(t)+1T i.∫err(t)d t+T D d err(t)d t)二、PID算法的数字离散化假设采样间隔为T,则在第K个T时刻:偏差err(k)=i(k) - o(k)积分环节用加和的形式表示,即err(k) + err(k+1) + …微分环节用斜率的形式表示,即[err(k)- err(k−1)]/T; PID算法离散化后的式子:u(k)=k p(err(k)+TT i.∑err(j)+T DT(err(k)−err(k−1)))则u(k)可表示成为:u(k)=k p(err(k)+k i∑err(j)+k d(err(k)−err(k−1)))其中式中:比例参数k p:控制器的输出与输入偏差值成比例关系。
系统一旦出现偏差,比例调节立即产生调节作用以减少偏差。
特点:过程简单快速、比例作用大,可以加快调节,减小误差;但是使系统稳定性下降,造成不稳定,有余差。
积分参数k i:积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
微分参数k d:微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
KC * (SPn —P Vn)+KC * TS / TI * (SPn —P Vn) +MX+KC * TD / TS * (SPn —P Vn —S Pn-1 +PVn-1)KC 是回路增益(个人理解为比例系数)SPn 是在采样时间n时设定点的数值SPn--1 是在采样时间n--1时设定点的数值PVn 是在采样时间n时过程变量的数值PVn--1 是在采样时间n--1时过程变量的数值MX 是在采样时刻n--1时的积分项的数值TD 是回路的微分周期(也称为微分时间或速率)TS 是回路采样时间TI 是回路的积分周期(也称为积分时间或复位)CPU实际使用以上简化算式的改进形式计算PID输出。
这个改进型算式是:Mn = MPn + MIn + MDn输出= 比例项+ 积分项+ 微分项其中:Mn 是在采样时间n时的回路输出的计算值MPn 是在采样时间n时回路输出比例项的数值MIn 是在采样时间n时回路输出积分项的数值MDn 是在采样时间n时回路输出微分项的数值理解PID方程的比例项比例项MP是增益(KC)和偏差(e)的乘积。
其中KC决定输出对偏差的灵敏度,偏差(e)是设定值(SP)与过程变量值(PV)之差。
S7-200解决的求比例项的算式是:MPn = KC * (SPn -- P Vn)其中:MPn 是在采样时间n时的回路输出的比例项值KC 是回路增益SPn 是在采样时间n时的设定值的数值PVn 是在采样时间n时过程变量的数值理解PID方程的积分项积分项值MI与偏差和成正比。
S7-200解决的求积分项的算式是:MIn = KC * TS / TI * (SPn -- P Vn) + MX其中:MIn 是在采样时间n时的回路输出积分项的数值KC 是回路增益TS 是回路采样时间TI 是回路的积分周期(也称为积分时间或复位)SPn 是在采样时间n时的设定点的数值PVn 是在采样时间n时的过程变量的数值MX 是在采样时刻n--1时的积分项的数值(也称为积分和或偏差)积分和(MX)是所有积分项前值之和。
第5章数字PID及其算法数字PID是指使用数字信号处理器(DSP)或微处理器实现的PID控制算法。
它将传统的模拟PID控制器转换为数字信号,通过数值计算和运算来实现对控制系统的稳定和优化。
本章将介绍数字PID的基本原理和常用的数字PID算法。
一、数字PID的基本原理数字PID与传统的模拟PID控制器在基本原理上是一致的,都是通过调整控制器的输出来实现对系统的控制。
数字PID的基本原理包括三个部分:1. 比例(Proportional)部分:根据系统的偏差(即期望值与实际值之差)与设定的比例增益,计算出控制器的比例调节量。
比例调节量通过放大或缩小偏差,反映了控制器对于系统偏差的敏感程度。
2. 积分(Integral)部分:通过对偏差的积分,将系统之前的误差累积起来。
积分调节量考虑了系统在一段时间内的偏差总和,用于消除系统的稳态误差。
3. 微分(Derivative)部分:通过对偏差的微分,计算出系统的变化速率。
微分调节量根据偏差的变化率来预测系统的未来变化趋势,并对控制器的输出进行调整,以减少系统的震荡和振荡。
通过比例、积分和微分三个部分的调节,数字PID可以实现对系统的稳定和响应速度的平衡。
二、常用的数字PID算法1. Ziegler-Nichols算法:Ziegler-Nichols算法是最为常用的数字PID调参方法之一、该算法通过开环试验,观察系统的响应曲线,从而确定合适的比例增益和积分时间。
2. Pole-Zero Canceling算法:Pole-Zero Canceling算法是一种基于系统分析的数字PID调参方法。
它通过分析系统的传递函数,在前向通路中取消极点和零点,从而得到更稳定的闭环系统。
3. Smith Predictor算法:Smith Predictor算法是一种针对具有时延的系统的数字PID调参方法。
它通过引入状态估计器,对系统的时延进行补偿,从而提高系统的响应速度和稳定性。
第8章数字PID及其算法
数字PID(Proportional-Integral-Derivative)是一种用于控制系
统的控制算法。
数字PID算法通过测量系统的反馈信号和设定值之间的差异,计算出一个控制输出,以调整系统的行为,使系统的输出尽可能接近
设定值。
数字PID算法包括三个部分:比例控制(Proportional Control)、
积分控制(Integral Control)和微分控制(Derivative Control)。
比例控制是根据系统的误差大小来调整控制输出的大小,使得误差越大,控制输出越大。
积分控制是根据系统误差的积分累加值来调整控制输出的大小,以消
除系统的静态误差。
微分控制是根据系统误差的变化率来调整控制输出的大小,以消除系
统的动态误差。
数字PID算法的计算公式为:输出值=Kp*偏差+Ki*积分误差+Kd*微分
误差
其中,Kp、Ki和Kd分别为比例、积分和微分控制的系数,通过调整
这些系数可以改变系统的响应速度和稳定性。
数字PID算法可以通过离散化的方式进行实现,即将连续时间的PID
算法转化为离散时间的PID算法。
离散化的方式可以使用采样周期来实现,即在每个采样周期内计算出一个控制输出。
数字PID算法在实际应用中广泛使用,可以用于控制各种系统,例如温度控制、速度控制、位置控制等。
它具有简单、可靠、稳定等优点,在工业自动化领域得到了广泛应用。
第三章数字PID控制算法
数字PID控制算法是一种基于数字信号处理技术的PID控制算法。
它
将传统的模拟PID控制算法转化为数字形式,通过采样、离散化和数值运
算等过程实现控制系统的自动调节。
数字PID控制算法主要包括以下几个步骤:
1.信号采样:通过模数转换器将被控系统的输出信号转化为数字信号,以便进行后续的离散化处理。
2.离散化:将连续时间域的PID控制算法转化为离散时间域的算法。
通常采用离散化的方法有Z变换法、欧拉法等。
3.数值运算:根据离散化得到的差分方程,通过数值运算得到当前时
刻的控制量。
常用的数值运算方法有增量式PID算法、位置式PID算法等。
4.输出控制信号:根据计算得到的控制量,通过数字信号处理器将其
转化为模拟信号,作为控制器的输出信号,控制被控对象。
数字PID控制算法相对于模拟PID控制算法具有以下优点:
1.精度高:数字PID控制算法通过离散化处理可以实现更精确的控制,提高控制系统的响应速度和稳定性。
2.灵活性强:数字PID控制算法可以通过调节离散参数来实现不同的
控制效果,适应不同的被控对象和控制要求。
3.可编程性好:数字PID控制算法可以通过编程的方式实现,便于调
试和修改,提高系统的可维护性和可扩展性。
数字PID控制算法在工业控制、自动化设备、机器人等领域得到广泛应用,并且随着数字信号处理技术的不断发展,数字PID控制算法也在不断优化和改进,为实现更高效、精确的控制提供了强大的工具。
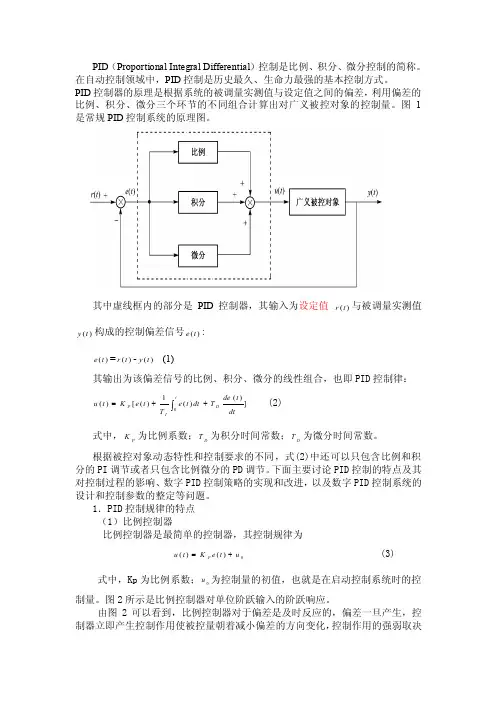
PID (Proportional Integral Differential )控制是比例、积分、微分控制的简称。
在自动控制领域中,PID 控制是历史最久、生命力最强的基本控制方式。
PID 控制器的原理是根据系统的被调量实测值与设定值之间的偏差,利用偏差的比例、积分、微分三个环节的不同组合计算出对广义被控对象的控制量。
图1是常规PID 控制系统的原理图。
其中虚线框内的部分是PID 控制器,其输入为设定值)(t r 与被调量实测值)(t y 构成的控制偏差信号)(t e :)(t e =)(t r -)(t y (1)其输出为该偏差信号的比例、积分、微分的线性组合,也即PID 控制律:])()(1)([)(0⎰++=tDIP dtt de T dt t e T t e K t u (2)式中,P K 为比例系数;D T 为积分时间常数;D T 为微分时间常数。
根据被控对象动态特性和控制要求的不同,式(2)中还可以只包含比例和积分的PI 调节或者只包含比例微分的PD 调节。
下面主要讨论PID 控制的特点及其对控制过程的影响、数字PID 控制策略的实现和改进,以及数字PID 控制系统的设计和控制参数的整定等问题。
1.PID 控制规律的特点 (1)比例控制器比例控制器是最简单的控制器,其控制规律为0)()(u t e K t u P += (3)式中,Kp 为比例系数;0u 为控制量的初值,也就是在启动控制系统时的控制量。
图2所示是比例控制器对单位阶跃输入的阶跃响应。
由图2可以看到,比例控制器对于偏差是及时反应的,偏差一旦产生,控制器立即产生控制作用使被控量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数Kp 。
图2 比例控制器的阶跃响应比例控制器虽然简单快速,但对于具有自平衡性(即系统阶跃响应终值为一有限值)的被控对象存在静差。
加大比例系数Kp 虽然可以减小静差,但当Kp 过大时,动态性能会变差,会引起被控量振荡,甚至导致闭环系统不稳定。
第五章数字PID及其算法
数字PID(Proportional-Integral-Derivative)是一种控制算法,
用于实现系统的自动控制。
它根据系统的误差信号,即期望值与实际值之
间的差异,通过比例、积分和微分三个部分来生成控制输出。
数字PID算法的基本原理是根据误差信号的大小和变化率来调整控制
输出,以尽量减小误差并实现系统的稳定控制。
具体的计算公式如下:控制输出=Kp*e+Ki*∑e+Kd*Δe
其中,Kp、Ki和Kd分别表示比例、积分和微分参数,e表示当前的
误差,∑e表示误差的累积和,Δe表示误差的变化率。
数字PID算法的实现一般分为以下几个步骤:
1.获取期望值和实际值,计算误差e。
2.根据比例参数Kp,计算比例控制量Kp*e。
3.根据积分参数Ki,将误差e累积到∑e中。
4.根据积分控制量Ki*∑e。
5.根据微分参数Kd,计算误差的变化率Δe。
6.根据微分控制量Kd*Δe。
7.将比例、积分和微分控制量相加得到最终的控制输出。
数字PID算法的优点是简单易实现,可以适用于各种不同类型的系统,并且可以通过调整比例、积分和微分参数来优化控制效果。
然而,数字
PID算法也存在一些缺点,如对参数的选择较为敏感,需要经过试验和调
整才能得到最佳参数值。
此外,数字PID算法也不能处理非线性系统和时变系统等特殊情况。
因此,在实际应用中,可能需要结合其他控制算法来进一步改进系统的性能。
连续域里PID 调节器的输出为1()()[()()]t p dide t u t K e t e t dt T T dt=++⎰数字PID 控制算法用数值逼近的方法实现PID 控制规律, 数值逼近的方法:用求和代替积分、用后向差分代替微分,使模拟PID 离散化为差分方程。
数字PID 控制有两种实现方法:位置式、增量式。
程序中ASR 部分的PID 采用的是位置式。
(1)位置式PID 控制算法()kt s j j e t dt T e =≈∑⎰1()k k se e de t dtT --≈10[()]ks D k p k j k k j IsT T u K e e e e T T -==++-∑p K 为比例增益,s T 为计算周期,I T 为积分时间,D T 为微分时间。
位置式PID 控制算法的程序设计思路:将三项拆开,并应用递推进行编程10()kk p k I j D k k j u K e K e K e e -==++-∑比例输出()p p k P k K e =积分输出0()(1)kI I j I k I j P k K e K e P k ===+-∑=(1)s pk I IT K e P k T +-微分输出1()()D D k k P k K e e -=-=1()D pk k sT K e e T --()()()()p I D P k P k P k P k =++注:程序中ASR 实际是对速度偏差的PI 控制,没有对速度偏差进行微分处理。
而“ASR 加速度补偿微分时间”是:通过设置此参数,将给定速度进行微分,得到一个前馈转矩给定,并加在给定转矩上,使在加减速过程中运行速度更好的跟踪给定速度,并减小超调。
(2)增量式PID 控制算法 10[()]ks D k p k j k k j IsT T u K e e e e T T -==++-∑111120[()]k s D k p k j k k j IsT T u K e e e e T T -----==++-∑1112[(2)]s D k k k p k k k k k k IsT T u u u K e e e e e e T T ----∆=-=-++-+增量式控制算法提供执行机构的增量k u ∆,只需要保持现时以前3个时刻的偏差值即可。
数字PID 及其算法主要内容:1、PID 算法的原理及数字实现2、数字PID 调节中的几个实际问题3、几种发展的PID 算法4、PID 参数的整定方法一、概述几个概念:1、程序控制:使被控量按照预先规定的时间函数变化所作 的控制,被控量是时间的函数。
2、顺序控制:是指控制系统根据预先规定的控制要求,按 照各个输入信号的条件,使过程的各个执行机构自动地按预 先规定的顺序动作。
3、PID 控制:调节器的输出是输入的比例、积分、微分的 函数。
4、直接数字控制:根据采样定理,先把被控对象的数学模 型离散化,然后由计算机根据数学模型进行控制。
5、最优控制:是一种使控制过程处在某种最优状态的控制。
6、模糊控制:由于被控对象的不确定性,可采用模糊控制。
二、PID 算法的原理及数字实现PID 调节的实质:根据系统输入的偏差,按照PID 的函数 关系进行运算,其结果用以控制输出。
PID 调节的特点:PID 的函数中各项的物理意义清晰,调节灵活,便于程序化实现。
三、 PID 算法的原理及数字实现PID 调节器是一种线性调节器,他将设定值w 与实际值y 的偏差:按其比例、积分、微分通过线性组合构成控制量1、比例调节器:比例调节器的微分方程为:)(*y t e Kp =y 为调节器输出,Kp 为比例系数,e(t)为调节器输入偏差。
由上式可以看出比例调节的特点:调节器的输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是,Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的阶跃响应特性曲线如下图yw e -=sd *K s Ki pK 对象 we + - + + + u y2、积分调节器:积分作用是指调节器的输出与输入偏差的积分成比例的作用,其作用是消除静差。
积分方程为:TI 是积分时间常数,它表示积分速度的大小,TI 越大,积分速度越慢,积分作用越弱。
数字PID 及其算法主要内容:1、PID 算法的原理及数字实现2、数字PID 调节中的几个实际问题3、几种发展的PID 算法4、PID 参数的整定方法一、概述几个概念:1、程序控制:使被控量按照预先规定的时间函数变化所作 的控制,被控量是时间的函数。
2、顺序控制:是指控制系统根据预先规定的控制要求,按 照各个输入信号的条件,使过程的各个执行机构自动地按预 先规定的顺序动作。
3、PID 控制:调节器的输出是输入的比例、积分、微分的 函数。
4、直接数字控制:根据采样定理,先把被控对象的数学模 型离散化,然后由计算机根据数学模型进行控制。
5、最优控制:是一种使控制过程处在某种最优状态的控制。
6、模糊控制:由于被控对象的不确定性,可采用模糊控制。
二、PID 算法的原理及数字实现PID 调节的实质:根据系统输入的偏差,按照PID 的函数 关系进行运算,其结果用以控制输出。
PID 调节的特点:PID 的函数中各项的物理意义清晰,调节灵活,便于程序化实现。
三、 PID 算法的原理及数字实现PID 调节器是一种线性调节器,他将设定值w 与实际值y 的偏差:按其比例、积分、微分通过线性组合构成控制量1、比例调节器:比例调节器的微分方程为:)(*y t e Kp =y 为调节器输出,Kp 为比例系数,e(t)为调节器输入偏差。
由上式可以看出比例调节的特点:调节器的输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是,Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的阶跃响应特性曲线如下图yw e -=sd *K s Ki pK 对象 we + - + + + u y2、积分调节器:积分作用是指调节器的输出与输入偏差的积分成比例的作用,其作用是消除静差。
积分方程为:TI 是积分时间常数,它表示积分速度的大小,TI 越大,积分速度越慢,积分作用越弱。
积分作用的响应特性曲线,如下图所示由图中曲线看出积分作用的特点:只要偏差不为零就会 产生对应的控制量并依此影响被控量。
增大Ti 会减小积分作用,即减慢消除静差的过程,减小超调,提高稳定性。
3、微分调节器:微分调节的作用是对偏差的变化进行控制,并使偏差消失在萌芽状态,其微分方程为:微分作用响应曲线如下图所示可见,微分分量对偏差的任何变化都会产生控制作用,以调整系统输出,阻止偏差变化。
偏差变化越快,则产生的阻止作用越大。
从分析看出,微分作用的特点是:加入微分调节将有助于减小超调量,克服震荡,使系统趋于稳定。
他加快了系统的动作速度,减小调整的时间,从而改善了系统的动态性能。
四、PID 算法的数字化在模拟系统中,PID 算法的表达式P(t)调节器输出,e(t)调节器的偏差信号,Kp 比例系数,Ti 积分时间,Td 微分时间PID 调节器对阶跃响应特性曲线dt t eT tI ⎰=)(1)(y dtde(t)T y(t)D =对前一算式离散化,即为数字式的差分方程式中:T 采样周期;E(k)第k 次采样时的偏差值;E(k-1)第k-1次采样时的偏差值;k 采样序号;P(k) 第k 次采样时的调节器输出。
上式中,输出值与阀门的开度的位置一一对应,因此称 之为位置式控制算式。
根据递推原理,可得增量式:)]2()1(2)([)()]1()([)1()(-+--++--+-=k E k E k E Kd k KiE k E k E Kp k P k P)(7-7)1()()(P --=∆k P k P k)]2()1(2)([)()]1()([K -+--++--=k E k E k E Kd k KiE k E k E p式中:Kp 比例系数;Ki=Kp*(T/Ti)积分系数;Kd=Kp*(Td/T)微分系数,(7-7)为增量控制式。
增量式PID 算法只需保持当前时刻以前三个时刻的误差即可。
它与位置式PID 相比,有下列优点:(1)位置式PID 算法每次输出与整个过去状态有关,计算式中要用到过去误差的累加值,因此,容易产生较大的累积计算误差。
而增量式PID 只需计算增量,计算误差或精度不足时对控制量的计算影响较小。
(2)控制从手动切换到自动时,位置式PID 算法必须先将计算机的输出值置为原始阀门开时,才能保证无冲击切换。
若采用增量算法,与原始值无关,易于实现手动到自动的无冲击切换。
五、PID 程序设计1、位置式PID 算法程序设计由下式可改写为把上式进一步分为P 、I 、D 三项:下图为位置式流程框图,说明:(1) 在计算之前,需要完成采样数据处理。
(2) 按照上式分解出来的三项,分别进行计算。
(3) 将计算出来的数据作为控制量输出。
)]1()([)(K )()(P })1()()()({)(P 0D 0D --++=--++=∑∑==k E k E K j E k E K k T k E k E T j E T T k E K k k j I P k j I P )]1()([)()1()()()(P )()(P 0--=-+===∑=k E k E K k P k P k E K j E K k k E K k D D k j I I I I P P2、增量式PID 算法程序设计由下式设:则有:下图为增量式流程框图,说明: (1)在计算之前,需要完成采样数据处理。
(2)按照上式分解出来的三项,分别进行计算。
(3)将计算出来的数据作为控制量的增量与前一拍输出量相加作为本次的输出量。
)]2()1(2)([)(K )]1()([)(P -+--++--=∆k E k E k E K k E k E k E K k D I P )]2(E )1(2)([)()()(P )]1()([)(P -+--=∆=∆--=∆k k E k E K k P k E K k k E k E K k D D I I P P )()(P )(P )(P k P k k k D I P ∆+∆+∆=∆六、数字PID 调节中的几个问题1、正、反作用问题正、反作用问题也称为:正、逆调节问题。
正作用:当采样值大于设定值时,需要加大控制量的输出。
例:温度控制中的制冷过程。
反作用:当采样值小于设定值时,需要加大控制量的输出。
例:温度控制中的加热过程。
在微机控制系统中,处理正、反作用时可用对偏差值求反来实现。
2、饱和作用的抑制在实际控制系统中,控制量因受到执行部件的机械和物理的约束而限制在有限的范围内时,如果计算机给出的控制量超出上述范围,则控制系统进入输出饱和状态。
在PID 控制系统中,由于积分作用的存在,会使系统的控制输出进入饱和状态。
注意理解:饱和以后所导致的对系统的不利影响,如下图示。
)()1-()1-()2-(k E k E k E k E ←←,PID 增量型运算程序 计算)()()(E k M k R k -= 计算)]2(E )1(2)([)(-+--=∆k k E k E K k P D D )()()(P )(P P k P k P k k D I ∆+∆+∆=∆ 返回 输入M(k),R(k) 计算)]1()([)(P --=∆k E k E K k P P 计算)()(P k E K k I I =∆为了消除积分饱和的影响,可有如下几种办法:(1)遇限削弱积分法这种算法的基本思想是:一旦控制量进入饱和区范围,则停止增大积分项的运算而只执行削弱积分项的运算。
这种算法的流程图如下屏所示。
(2)有效偏差法在用位置型PID算式算出的控制量超出执行范围时,控制量实际上只能取边界值。
有效偏差法的实质:将实际输出控制量所允许的偏差值作为实际有效偏差进行积分。
而不是按照实际偏差来进行积分,算法如右图示:(3)限位问题是指在有些系统中,人为定义了控制量的输出范围。
当计算出的控制量大于或者小于所定义的输出范围时,则按照定义的控制量上限或者下限进行输出。
如右图示。
3、手动/自动跟踪及手动后援问题在应用系统中,控制状态由手动与自动相互切换时,必须实现自动跟踪(柔性跟踪)。
因此,系统需要实时监测的控制状态、手动/自动的阀位状态。
称在手动状态下能够输出手动控制信号的设备为手动后援。
在计算机控制系统中,手动/自动跟踪以及手动后援是保障系统可靠运行的重要功能。
实现的方法(自学)。
PID算法的发展在计算机控制系统中,经常使用改进的PID算法以实现更高的控制品质。
七、PID算法的发展1、积分分离的PID算法在常规的PID算法应用中,若系统的偏差较大时,由于积分项的作用,会使系统产生较大的超调量,导致系统不断的震荡,如下图。
可针对这种现象采用积分分离的办法,即在控制量开始跟踪时,屏蔽积分分量的作用,直至被调量接近给定值时才使积分分量产生作用。
设给定值R(k),采样值M(k),允许的积分偏差值A,则积分分离的算法为:2、变速积分的PID算法在普通的PID调节算法中,由于积分系数K I是常数,因此,在整个调节过程中,积分增益不变。
但系统对积分项的要求是系统偏差大时积分作用减弱以至全无,而在小偏差时则应加强。
否则,积分系数取大了会产生超调,甚至积分饱和,取小了又迟迟不能消除静差。
采用变速积分可以很好地解决这一问题。
变速积分的基本思想是:设法改变积分项的累加速度,使其与偏差的大小相对应:偏差越大,积分越慢;偏差越小,积分越快。
八、PID参数的整定方法1、采样周期的确定(1)根据香农采样定理,系统采样频率的下限为f s =2fmax,此时系统可真实地恢复到原来的连续信号。
(2)从执行机构的特性要求来看,有时需要输出信号保持一定的宽度,采样周期必须大于这一时间。
(3)从控制系统的随动和抗干扰的性能来看,要求采样周期短些。
(4)从微机的工作量和每个调节回路的计算来看,一般要求采样周期大些。
(5)从计算机的精度看,过短的采样周期是不合适的。
一般采用经验法来选择采样周期,重要的是要根据系统的实际运行状况来确定采样周期。
选择采样周期的经验数据如下表:2、扩充临界比例度法这是工程中常用的方法,也叫实验经验法,它适应于有自平衡性的被控对象。
方法如下:首先,将调节器选为纯比例调节器,形成闭环,逐渐改变比例系数,使系统对阶跃输入的响应达到临界振荡状态, 将此时的比例系数记为Kr ,临界振荡的周期记为Tr 。
根据齐格勒-尼科尔斯提供的经验公式,可由Tr 、Kr 得到不同类型调节器的控制参数,如下表。
3、扩充响应曲线法如果可以预知系统的动态特性曲线,可用扩充响应曲线法来整定参数。
步骤为:(1)在手动方式下,使系统某一设定值处达到平衡后,给一阶跃输入,如下图。
(2)记录下在此作用下的变化过程曲线,如下图。
(3)在曲线最大斜率处求得滞后时间θ,被控对象时间常数τ,及比值τ/θ。