焊接机器人操作培训教材
- 格式:pdf
- 大小:1.89 MB
- 文档页数:44
目录1培训手册介绍---------------------------------------------2 2系统安全与环境保护---------------------------------------------3 3机器人综述---------------------------------------------5 4机器人示教--------------------------------------------12 5机器人启动--------------------------------------------25 6自动生产--------------------------------------------277 编程与测试--------------------------------------------328 输入输出信号--------------------------------------------509 系统备份与冷启动--------------------------------------------5210 文件管理--------------------------------------------54❖在没有声明的情况下,文件中的信息会发生变化。
上海A B B工程有限公司不对此承担责任。
❖对文件中可能出现的错误,上海A B B工程有限公司不对此承担责任。
❖对于使用此文件或者此文件提及的软硬件所导致的部分或者严重性错误,上海A B B工程有限公司无论如何不对此承担责任。
❖没有上海A B B工程有限公司书面允许,此文件的任何部分不得拷印或复制,并且其中内容也不能转于第三方和用作非法目的。
否则将追究其法律责任。
❖文件中如有不详尽处,参阅<< User Guide >>、<< Product Manual >>、<< RAPID Reference Manual >>。
OTC焊接机器人基本操作培训一、OTC 焊接机器人系统组成OTC 焊接机器人系统主要由机器人本体、控制器、示教器、焊接电源、送丝机、焊枪等部分组成。
机器人本体是执行焊接任务的机械部分,具有多个关节和自由度,能够实现精确的运动轨迹。
控制器是整个系统的核心,负责控制机器人的动作、协调各个部件的工作以及处理各种输入输出信号。
示教器则是操作人员与机器人进行交互的工具,通过示教器可以对机器人进行编程、调试和操作。
焊接电源为焊接过程提供稳定的电流和电压,送丝机负责将焊丝准确地输送到焊枪前端,而焊枪则是直接进行焊接的工具。
二、操作前的准备工作在进行 OTC 焊接机器人操作之前,需要做好以下准备工作:1、检查设备确保机器人本体、控制器、示教器、焊接电源、送丝机、焊枪等设备外观无损坏,各连接线路无松动。
2、电源和气源接通机器人系统的电源,并确保气源压力稳定在规定范围内。
3、工装夹具检查工装夹具是否安装牢固,定位准确,以保证焊接工件的位置精度。
4、焊丝和保护气体准备好合适规格的焊丝,并确保保护气体的储量充足且纯度符合要求。
5、安全防护操作人员应穿戴好防护用品,如焊接手套、护目镜等,确保工作环境的安全。
三、示教器的基本操作示教器是操作 OTC 焊接机器人的重要工具,以下是示教器的一些基本操作:1、界面介绍示教器的界面通常包括菜单区、状态栏、操作区等。
菜单区提供了各种功能选项,状态栏显示机器人的当前状态信息,操作区用于进行机器人的运动控制和编程操作。
2、坐标系选择OTC 焊接机器人通常支持多种坐标系,如关节坐标系、直角坐标系、工具坐标系等。
操作人员应根据实际需求选择合适的坐标系进行操作。
3、运动操作通过示教器上的按键或摇杆,可以控制机器人在各个坐标轴上的运动。
在运动过程中,应注意观察机器人的运动轨迹,避免碰撞。
4、程序编辑在示教器上可以创建、修改和保存焊接机器人的程序。
程序编辑包括指令的输入、参数的设置等。
四、机器人的编程1、编程步骤(1)选择编程模式在示教器上选择编程模式,进入程序编辑界面。
OTC焊接机器人基本操作培训(增加多场景)OTC焊接基本操作培训1.引言随着工业自动化程度的不断提高,焊接在制造业中的应用越来越广泛。
OTC焊接作为行业内的佼佼者,其高效、稳定的焊接性能受到了众多企业的青睐。
为了充分发挥OTC焊接的优势,提高生产效率,本文将详细介绍OTC焊接的基本操作培训,帮助操作人员熟练掌握焊接的操作技巧。
2.OTC焊接基本结构及功能2.1基本结构OTC焊接主要由本体、焊接电源、控制系统、焊接传感器和焊接设备组成。
本体包括机械臂、驱动系统和控制器等部分,负责执行焊接任务。
焊接电源为焊接过程提供稳定的电流和电压。
控制系统用于控制本体的运动和焊接参数的调节。
焊接传感器用于监测焊接过程中的各种参数,以保证焊接质量。
焊接设备包括焊枪、焊接电缆等。
2.2功能(1)自动化焊接:通过编程实现各种焊接工艺的自动化执行,提高生产效率。
(2)稳定焊接质量:采用先进的焊接控制技术和传感器,保证焊接质量的稳定。
(3)灵活编程:可根据焊接任务需求,灵活设置焊接参数和路径。
(4)多样化焊接工艺:支持多种焊接工艺,如气体保护焊、激光焊等。
(5)安全防护:具备安全防护功能,确保操作人员的安全。
3.OTC焊接基本操作培训3.1操作前准备(1)检查设备:检查OTC焊接及其周边设备是否正常,包括电源、气源、冷却水等。
(2)穿戴劳保用品:操作人员需穿戴好劳保用品,如防尘口罩、防护眼镜、防护手套等。
(3)了解焊接任务:了解本次焊接任务的具体要求,包括焊接工艺、焊接材料、焊接参数等。
3.2操作步骤(1)启动设备:按照设备操作规程,依次启动OTC焊接及其周边设备。
(2)编程:根据焊接任务需求,设置焊接参数和路径。
可通过示教器或编程软件进行编程。
(3)调试:在正式焊接前,进行试运行,检查编程是否正确,焊接参数是否合适。
(4)焊接:启动焊接程序,进行自动化焊接。
(5)监控:在焊接过程中,实时监控焊接参数和焊接质量,确保焊接过程稳定。

定义与发展历程定义焊接机器人是一种自动化、智能化的焊接设备,它结合了机器人技术、传感器技术、控制技术等,能够实现高效、精确的焊接作业。
发展历程焊接机器人的发展经历了从示教编程到离线编程、从单一功能到多功能集成、从低智能化到高智能化的发展历程。
随着技术的不断进步,焊接机器人的应用领域也在不断扩展。
焊接机器人在汽车制造领域应用广泛,能够实现车身、车架等部件的自动化焊接,提高生产效率和产品质量。
汽车制造航空航天领域对焊接质量和精度要求极高,焊接机器人能够满足这些要求,实现复杂结构件的精确焊接。
航空航天轨道交通车辆的制造过程中,焊接机器人能够实现车厢、车架等部件的自动化焊接,提高生产效率和产品质量。
轨道交通船舶制造过程中需要大量的焊接作业,焊接机器人能够实现高效、精确的焊接,提高生产效率和产品质量。
船舶制造焊接机器人应用领域高精度与高速度ABB焊接机器人采用先进的控制算法和传感器技术,能够实现高精度的定位和高速的运动,确保焊接质量和效率。
智能化与自动化ABB焊接机器人配备了先进的智能化系统,能够实现自动编程、自适应控制、故障诊断等功能,降低人工干预程度,提高生产效率和质量稳定性。
安全性与可靠性ABB焊接机器人采用多重安全防护措施和可靠的硬件设计,确保在恶劣环境下的稳定运行和操作安全。
同时提供完善的售后服务和技术支持,确保客户在使用过程中无后顾之忧。
灵活性与可扩展性ABB焊接机器人具有高度的灵活性和可扩展性,能够适应不同规格和形状的工件焊接需求,同时支持多种焊接工艺和方法的集成。
ABB焊接机器人特点与优势01机器人本体包括底座、腰部、大臂、小臂、腕部等部分,构成机器人的骨架。
02焊接工具包括焊枪、焊丝等,用于执行焊接任务。
03其他辅助设备如送丝机构、清枪剪丝机构等,协助完成焊接过程。
机械结构检测机器人各关节的位置和角度,实现精确控制。
位置传感器检测焊接电流、电压、送丝速度等参数,确保焊接质量。
焊接过程传感器监测机器人运动速度,保证运动平稳和精度。
焊接机器人基本操作及应用书籍(最新版)目录一、焊接机器人概述二、焊接机器人的基本操作三、焊接机器人的应用四、焊接机器人的维护保养与编程五、焊接机器人的发展趋势与挑战正文一、焊接机器人概述焊接机器人是一种能够执行焊接任务的自动化设备,它主要由机械臂、焊枪、控制系统等部分组成。
焊接机器人在汽车制造、船舶制造、钢铁建筑等行业中得到了广泛应用,它不仅能提高生产效率,还能降低劳动强度和提高生产质量。
二、焊接机器人的基本操作焊接机器人的基本操作包括:示教器操作、简易指令编辑、激光调控等。
示教器操作是焊接机器人最基本的操作方式,通过示教器,操作人员可以教导焊接机器人如何进行焊接任务。
简易指令编辑则是通过编程语言,编写焊接机器人的焊接路径和焊接参数。
激光调控则是通过激光测距仪,调整焊接机器人的焊接精度。
三、焊接机器人的应用焊接机器人在汽车制造、船舶制造、钢铁建筑等行业中得到了广泛应用。
以汽车制造为例,早在 70 年代末,我国上海电焊机厂与上海电动工具研究所就合作研制出了直角坐标机械手,成功应用于上海牌轿车底盘的焊接。
此后,一汽等企业也陆续引进了焊接机器人,用于车身焊接和车身顶盖的焊接。
四、焊接机器人的维护保养与编程焊接机器人的维护保养主要包括机器的结构、机器的原理、机器的维护保养、简易指令编辑、激光调控等方面。
对于焊接机器人的编程,需要了解机器人的系统构成、操作方法和编程指令,才能编写出符合实际需求的焊接路径和焊接参数。
五、焊接机器人的发展趋势与挑战随着科技的发展,焊接机器人将会有更广泛的应用,更高的焊接精度和更智能的自动化功能。

一、开设该课程的必要性焊接机器人在我国以每年以35%以上的增速不断扩展,已经进入了高速发展期。
但机器人编程操作方面的应用人才十分缺乏,制约了我国机器人应用技术更大程度的发展,特别是具有焊接专业知识的机器人编程人员更是少又少。
此前,机器人操作培训工作属于售后服务范畴,均由企业自行承担,参照操作说明书学习,难以满足企业对高技能人才的需求。
因此,在职业技术院校开设机器人技能学习课程非常必要,编制一套适合职业技术教育的焊接机器人教材,使更多的学生有机会学习焊接机器人操作技能,为企业输送高技能的焊接机器人编程人员,以适应机器人应用领域日益的发展需要。
二、课程的性质与任务1、本课程是职业技术院校焊接专业的一门专业技能课程。
它的目标是使学生具备从事相关专业的高素质劳动者和中高级专门人才所必需的基本知识和基本技能;并为提高学生的全面素质、增强适应职业变化的能力和继续学习的能力打下良好的基础。
2、教学目的:通过学习,要求掌握两种技能:A、机器人操作技能。
B、机器人焊接技能。
掌握焊接机器人应知、应会的理论和技能学习内容,为企业培养合格的焊接机器人编程操作人员。
3、教学难点:从理论到实际,要经过一个由眼到脑再到手的学习适应过程。
另外,由于设备贵重,一般的教学点都存在机器人数量不足情况。
此时应合理组织调配,保证每个学生的上机操作时间。
机器人焊接工艺的掌握需要进行一定时间的焊接实践才能积累一些经验。
三、教材编写思路1.以介绍机器人基础知识入手,由浅入深、层层展开。
以机器人的基本原理、基本概念切入,消除学生对机器人的神秘感,再进入机器人操作的内容学习。
2.以图文结合的形式,将模拟图、系统图和现场照片相结合,方便学习和领悟。
3.针对焊接机器人操作及应用这一课题方向,选取在市场中占有率较大的松下机器人为范本,以机器人操作技能为主要学习目的,明确教学方向。
4.借鉴焊接机器人最新资料和具有代表性实际案例(附现场照片),使资料更加详实、具体,便于学习过程中开阔视野。
《焊接机器人操作技术》1.1机器人安全系统1.1.1安全基本规章操作不当或者不按照规定使用机器人系统可能会导致对人体和生命造成威胁。
对机器人系统和用户的其它财物造成威胁以及对机器人系统和操作者的工作效率造成威胁。
1.1.2对用户和操作者的特别安全措施在进行更换工作、设置工作、维修工作、和调整工作时必须按照本操作指导说明的规定将机器人系统关断,即将机器人控制柜上的总开关置于“关断(AUS)”,并挂上挂锁,防止未经许可的重新开机在控制柜开关被关断后,大于50伏(600伏)的电压被送入KPS,KSD和中间回路连接电缆,时间超过5分钟。
机器人系统电气部分的工作只允许由电气专业技术人员或者在电气专业技术人员的指导和监督下由辅助人员按照通常适用的电气技术规范进行。
如果有效的安全装置与机器人系统直接或间接相关,并且要在这个机器人系统上进行更换、设置、保养和调整工作时,原则上不允许将这些安全装置拆除或者停在它的工作。
否则将对人体和生命构成威胁,如发生压伤、眼损伤、骨折、严重的内伤和外伤等安全事故。
如果必须在机器人的危险区域内工作的话,则最多允许机器人以手动运行速度动作,使工作人员有足够的时间离开会发生危险的范围或者将机器人停止。
不允许在机器人系统中进行任何自行改造和改动工作。
未经本公司销售代表的同意,不得在控制柜内部上面安装特殊装置,否则后果自付。
1.1.3安全功能包括工作空间限制;紧急开关;使能开关;紧急停止。
1、工作空间限制机器人的设计允许在三个主要轴上安装用于工作空间限制的机械停止附件,除此之外,使能软限位可以限制所有轴的运动范围。
2、紧急停止急停按钮安装在KUKA的控制面板上,在程序进行和操作当中同样可以使用.当在测试模式下扳动紧急停止键时,紧急停止功能会立即断开驱动器.动力制动器并保持制动.在自动模式下,紧急停止功能将通过驱动器的电源达到迅速停止的目的,一旦机器人处于停止状态,驱动器便会断开连接。
3、外部紧急停止如果应对危险情况,需要安置附加急停或者几个急停系统连在一起,它可以使用一个专用接口达到目的。
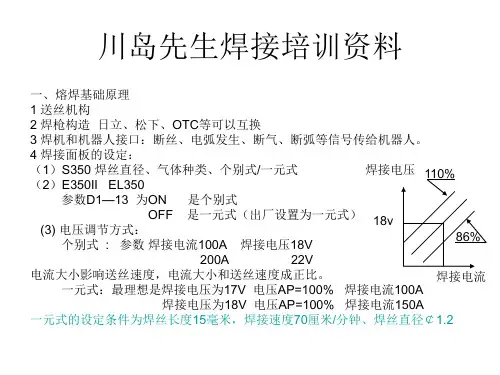
机器人焊接系统操作培训课程POWERWAVE 455R/M 和355.I 操作概述1. POWERWAVE - 描述1.1 逆变电源-基于高性能的带脉冲功能的数字焊接电源- 它的独特地与送丝机的联接,为系统提供了同步操作;它有能力在复杂的、高速信号波形控制下形成连续的、精确的焊接电弧。
Powerwave 提供优秀的、代表目前技术发展水平的焊接能量的控制,可将飞溅和烟气控制在最小的范围内。
1.2 所有不同的焊接工艺的程序,在出厂时就被编译并记存在焊机内,当操作员输入某一个焊接工艺以后,焊机就会自动地执行这个焊接工艺的程序。
1.3 此焊机具有以下焊接工艺:GMAW- 具有或不具有脉冲FCAWSTT (仅在455R/M中具有此功能)1.4 Powerwave 允许在CV模式下设置实际焊接电压。
1.5 在GMAW-CV 模式中,WFS 和电压可以独立地被设置,此时Powerwave 如同其它通用的焊接电源。
1.6 Powerwave 通过调整"Trim",对具有脉冲的焊接工艺来调整焊接电压。
1.7 用于机器人的PowerWave与半自动和手工焊的PowerWave比较,区别在於使用了一些不同的硬件和软件.例如,不能用Robotic PowerWave 进行焊条焊接。
1.8 在出厂前已为PowerWave与机器人的准确通信连接进行过校准。
2. 连接2.1 输入电源:455R;在焊机后方,卸下屏板,连接输入电源电缆,调整电压的接头,出厂时被设置在440 - 460VAC处。
355i;没有电源开关,电源通过一个机器人控制台内的断路开关进到355i,当断路开关打开,电源被接通到355i。
2.2 焊接电缆、正极和负极,前面板。
正极性; 大多被使用于GMAW 和STT的焊接工艺,正极螺柱连接到焊丝; 负极螺柱连接到工件。
负极性;主要被使用在某些FCAW的焊接工艺,正极螺柱连接到工件,负极螺柱连接到焊丝。
2021年 第4期 热加工28《焊接机器人操作工》职业技能培训教材框架及内容研究与开发刘伟1,黄瑞生2,郭广磊3,徐楷昕2,方乃文21.中国焊接协会机器人焊接(厦门)培训基地 福建厦门 3610232.哈尔滨焊接研究院有限公司 黑龙江哈尔滨 1500283.厦门市集美职业技术学校 福建厦门 361023摘要:对《焊工国家职业资格培训教程》系列丛书之《焊接机器人操作工》教材的框架结构和内容进行论述。
通过对焊接机器人操作工的职业技能特点进行分析,确定“以职业等级制划分为基础,以职业活动为导向,职业技能为核心”的编写指导思想,同时,为增加教材的普适性和实用性,力求与职业院校课程体系贯通与融合,切实解决焊接机器人操作工在培训过程中走入“重操作,轻工艺”的误区和“焊接工艺应用”教学难题,推动焊接机器人职业技能培训与鉴定教材的研究与开发工作。
关键词:焊接机器人;职业技能;培训教材1 序言当前,我国已成为全球最大的机器人市场,越来越多的企业将焊接机器人应用于加工制造的各个环节,“机器换人”浪潮不断掀起。
随着“中国制造2025”的逐步深入,企业对机器人焊接技能人才的需求日趋迫切。
为此,中国焊接协会受中国就业培训技术指导中心及中国劳动社会保障出版社委托,组织成立教材编委会,充分发挥在焊接产业的强大技术优势和人才优势,研究开发与《国家职业技能标准——焊工》(以下简称“《焊工》”)对接,与产业需求和企业生产相融合、适用教学实践活动的职业技能培训教材系列丛书。
2 教材开发的依据和编写思路2.1 以《焊工》标准为依据依据《焊工》国家职业鉴定技能标准,涵盖焊接机器人操作工全部条款内容,且不超出其要求范围,全面反映机器人焊接的新技术、新设备、新工艺和新方法。
2.2 与职业院校课程体系贯通与融合1)力求符合职业教育特点和课程标准的机器人焊接理论与实践一体化实训要求,与中职、高职和应用本科阶段的技能实训课程有机衔接,反映不同学历阶段的焊接机器人操作工所必须具备的职业能力。
Faunck焊接操作培训教材-济南奥太焊接操作教材Faunck焊接操作培训教材-济南奥太焊接操作教材第一章:操作系统介绍1.1 操作系统的定义1.2 操作系统的历史发展1.3 操作系统的优势和应用领域第二章:Faunck焊接概述2.1 Faunck焊接的特点与优势2.2 Faunck焊接的组成与结构2.3 Faunck焊接的工作原理与流程第三章:Faunck焊接的操作界面3.1 操作界面的介绍与主要功能3.2 操作界面的常用操作方法3.3 操作界面的参数设置与调整第四章:Faunck焊接的编程教学4.1 编程语言的介绍与选择4.3 编程语言的基本语法与命令 4.4 编程实例与案例分析第五章:Faunck焊接的安全操作5.1 安全操作流程与注意事项5.2 紧急情况处理与故障排除5.3 安全防护装置的使用与维护第六章:Faunck焊接的维护与保养6.1 常规的维护与保养工作6.2 零部件的更换与维修6.3 故障排查与修复第七章:Faunck焊接的应用案例分析 7.1 汽车行业的应用案例7.2 电子产品行业的应用案例7.3 其他行业的应用案例本文档涉及附件:1.Faunck焊接操作手册3.Faunck焊接安全操作指南4.Faunck焊接维护与保养手册本文所涉及的法律名词及注释:1.操作系统:计算机软件系统,用于控制和协调进行任务的操作。
2.编程语言:一种人类语言,用于编写操作指令的代码。
3.安全操作:在操作过程中,保证人员和设备安全的操作方法和措施。
4.维护与保养:对进行定期检查、清洁、维修和保养的工作。
松下工业机器人机器人教学GII 系列操作虎之卷WG ・G2/GXP/控制器 VR2/TA 机器人本体YA-1NC/YA-1PC/YA-1QC 系列松下焊接系统(株)机器人教学200603(K)- 目 录-①示教器说明1・各种功能键的说明2・正确手持示教器图解3・ID输入4② 手动操作・操作方法5・连续移动和微动6-7・微动量的设定7・暂停・紧急停止7③ 示教(如何新建程序)・示教和移动速度8・如何进入示教模式・如何登录示教点9・登录示教点及窗口界面10・退出示教11・示教时的用户功能键・ 『手腕插补CL』 11・示教的详细设定12・示教时的扩展设定内容12④ 文件(程序)的确认・修改(跟踪 )・继续示教时13・从文件中选择时14・退出文件确认・修改・ 『文件的排序』 15・跟踪时的作业内容(添加・修改・删除) 16-17 ・退出跟踪・返回窗口界面18・跟踪的速度18⑤ 圆弧的示教・圆弧插补(正确的示教方法・错误的示教方法・删除) 19⑥ 摆动的示教・示教方法20-21 ・摆动类型・跟踪前进后退动作22・摆动的删除・没有完全删除时的动作・计时器23・摆动的限制23⑦ 焊接区间的定义・焊接开始点・中间点・结束点的命令(焊接区间内改焊接规范) 24⑧ 编辑・文件(程序)的读出和结束25・光标移动的注意点26・命令的修改(ARC-SET,ARC-ON)・命令的删除27・命令的追加(输出ON,OFF,输入等待) 28・命令的追加(等待时间),修改(等待时间) 29・窗口内数值的修改30・用MDI操作修正位置30・示教点的排列・替换(包括焊接规范/速度等全部替换) 31⑨ 运行・启动方式・焊丝点动/检气・运行的限制32运行及运行中的修改33⑩ 追加+α的说明目录34.α1-1启动方式(设定) 35 α1-2启动方式(输入分配) 36 α1-3启动信号时机和连接端子37 α1-4主程序启动方式38 α2 登录待机位置和读出文件39 α3 标签(注释)的粘贴40 α4 文件编辑功能(剪切/复制/粘贴) 41 α5 以前机器job启动方式的继承 4 2①示教器的说明1.各种功能键的说明(-)上(+)右转换键 左转换键 安全开关TP正面TP背面2.正确手持示教器图解(将示教电缆缠在手臂上可以拿得更稳、更安全)3.ID输入●ID输入(发货时已设定为自动登录)・<ID输入界面>※没有出现ID输入界面时・在设定窗口 | 输入用户ID 「robot」(半角英文小写字母 (可以从参考中选择)・在设定窗口 | 输入登录密码 「0000」(半角数字)◎标准设定 (系统管理员级别)用户ID robot 密码 0000输入错误时可使用 BS(退格键)【自动登录的设定】设定 → 管理工具 → 用户管理→ 自动登录 界面内设定自动登录 (选择自动登录有效)设定ID设定管理工具用户管理自动登录【界面内设定】自动登录 有效 无效直角方向移动焊枪端部固定机器人运行工具标准运动工具中心(任选)移动时推荐变化角度时推荐切换坐标2)机器人移动①一边按着坐标系图标一边转动拨动按钮低速移动时 中速移动时 高速移动时* 根据拨动按钮的转动量使运行速度改变 (MAX15m)②or or* [+/-]键与界面右上方的“高”、“中”、“低” 的速度相对应(限制速度以下)速度的值在More 菜单的示教设定界面上进行设定3)个微动量个微动量+直角 T・P显示直角 ++・-键 运行标准速度 高 30m(限制15m) 中 10m(10m速度) 低 3m(3m速度)※3 ※3※1※2※1※2【示教详细设定】 与P12相同微动移动量 0.01mm ~9.99mm5.微动量设定 1)2) 3)4)※45)6.暂停 动作暂停后 ※7可以重启7.紧急停止 ※8将伺服电源关闭,动作安全停止 伺服打开后,可以重启、运行*在操作中 OK + 和是相同的操作。
其它 是 + 执行 +不 + × +※8停止紧急停止※7)登录 或 登录 ※3 ++OK+※5参考设定操作的P30页 ※4 ※6退出键ON+※1==登录 退出③示教A.示教速度和运行速度a.在焊接时[以焊接速度移动]MOVEL P8 10m/min 以10m的速度直线向S点移动ARC-SET AMP170 VOLT22.0 S0.60从S点焊接到E点 直线焊接 焊接规范170A 22V焊速60cmP8 S点 次序ARC-ON开始焊接MOVEL P9 10m/min以10m的速度跟踪到E点 以ARC-SET的速度运行 CRATER AMP 100 VOLT19.0 T=0.20 在E点以100A 19V 的收弧规范 进行0.2秒 收弧 P9 E点 次序ARC-OFF焊接结束b.机器人空走时 [以示教速度移动]P8 MOVEL P8 30m/min 以30m的速度直线向P8点移动 P9 MOVEL P9 10m/min 以10m的速度直线向P9点移动P8 P9 P8 焊接→ P9 点 次序 内容点 次序 内容・运行及跟踪时以ARC-SET的焊接速度运行 ・跟踪时的动作可以变更为示教速度(扩展设定)运行速度B如何进行示教 (新建程序)1.将模式切换开关打到 Teach上※12.打开 文件 菜单※23.4.确定新建的文件名4-1系统自动起的文件名可以的话单击OK ※4(或 登录 ) 4-2 修改文件名称时・将光标移动到文件名上并选择 ※5 ・选择数字(1,2,3) ※6 ・光标向BS移动 ※7 ・删除数字 ※8 ・输入想要的数字(程序号) ※9 ・确定程序名 ※10进 入 手 动 操 作5.向目标位置移动 ※116.登录示教点确认内容・追加模式的确认※12・插补形态的设定・确认※13 ・速度的确认※14 ・焊接・空走的设定※15※1 ※2※15※14※3※4PTP 直线 圆弧 摆动 圆弧摆动※12 OK++※11 +文件新建追加低速 中速 高速※13※5 +※6※7※8※9 +O K※10 或+ 或登录6-16-2① ② ③ ④7.结束示教1)切换界面 ※22 2)打开[文件]菜单※23 3)选择 保存文件 ※24<示教时的用户功能>F1 F2 F3 F4 F5跟踪ON 保护气・焊丝 切换示教内容命令的追加 切换 *速度焊接/空走切换插补形态切换坐标系切换上面是参考,可以随意进行组合。
(参考其它的附加说明) 在进行其它操作时,根据操作内容不同功能也不同。
详细内容请参考附加的用户功能说明。
[手腕插补形式 CL编号] CL编号 适用内容0 自动计算1 圆弧插补时,工具中心要接近垂直(10°以下)2 圆弧插补时,工具中心不要垂直(10°以上) 3使BW轴和RW轴平行进行操作。
使用CL3时,在特殊点上要回避RW轴反向转动。
但工具姿势就不能够保持一致了。
++※22※23※24文件保存8.(1) 2) 3)确认确认 4)完成9. 1) 2)④文件(程序)的确认及修改A.继续示教时1.选择 机器人动作OFF※1ON(灯亮)OFF(灯灭)2.将光标移到[程序窗口]的目标点上。
①从第一点开始确认时 ② 光标的位置 光标的位置( 3.选择 机器人动作ON ※3OFF(灯灭) ON(灯亮) 4.打开 跟踪 图标 ※45.跟踪操作1)跟踪前进 (光标移到下一个点) 2)跟踪后退 (移到光标所在点) <跟踪时的显示界面> ・前进到点1未到・前进到点1以外的点右转换键 +前进+※6 后退功能键功能键一直按住 一直按住 ① ②++键① ②+-键功能键B.从文件选择开始时1.2.3.选择[4.从「 *45.跟踪动作的动作类型※1※2※3文件打开或登录程序最近使用的文档※4C-1.退出文件确认、修改1.切换界面 ※12.选择 文件 ※23.选择文件菜单的 保存 ※34.保存文件[是否保存]?选择 是或 登录 ※4C-2.文件的排序※1※4※2+※3+是 保存文件切换界面+或者登录+种类按文件名(A→Z) 按文件名(Z→A) 按保存日期 (从新到旧) 按保存日期 (从旧到新) 按大小 (从小到大) 按大小 (从大到小)是否保存?是 否退出焊接++※7’+Ⅲ.修改示教点的速度・插补形态Ⅳ.※10※13 ++E.返回示教・跟踪界面的方法1.1) 2) 3) < ① ②2.+⑤ 圆弧的示教1.圆弧插补1-2 圆 (至少示教4个点)2. 2-1 圆弧结束点偏移(轨迹偏移)2-2 圆弧示教点过近(修改时轨迹偏移)3.示教3个点以上机器人不能够计算出中心点时,将作直线运行。
例)只有2个MOVEC点的情况与机器人走向圆弧开始点的动作4.圆弧的删除删除时请删除所有圆弧示教点(从任何一个圆弧点(MOVEC)开始删除皆可)发生轨迹偏移 MOVEC MOVEC<圆弧窗口例>1)机器人移动到摆动开始点③后,单击 登录插补形态位置名示教速度手腕插补形态(CL) 计时频率类型编号 空走点焊接点参考OK 或者 登录※32)(《3)(4)(《5)选择否*修改动作形态是否将下一个示教点作为振幅点登录?要结束摆动或者不示教振幅点时,单击“否”。
否4.摆动类型< 摆动的类型 >5. 1)前进时的动作 (直线移动到开始MOVELW 点) 在摆动区间内一边摆动一边跟踪前进2)后退时的动作不用摆动按照 E → ② → ① → S 顺序运行6.WEAVEP WEAVEP向后跟踪删除振幅点(只删除②①)7.不完全删除后机器人的动作 删除振幅点①・②时只删除振幅点②时8.摆动示教点的计时动作 即使在停止时,还是向主跟踪方向运行 (结束点方向) 9.摆动的限制1. 振幅×频率应在60mm・Hz以内(类型1~5) 2. 摆动角度×频率应在125゜・Hz以内(类型6) 3. 1/f―(TO+T1+T2+T3+T4>A删除T1T2f为频率「单位:Hz」 T0为开始点制定的时间值T1~T4为振幅点的时间值 A=0.1(パターン1.2.5.)A=0.075(类型3) A=0.15(类型4)A=0.05(类型6)⑦修改焊接规范从中间点修改焊接规范(只修改后面的输入规范) <文件(程序)界面例子>P3 溶接開始点 P4 焊接中间点 P5 焊接结束点ARC-ONCRATER ARC-OFF焊接开始点 焊接中间点 焊接结束点 ARC-SET 指定电流・电压・速度ARC-ON 为了开始焊接,调入程序ArcStart CRATER 指定弧坑电流・电压・时间 ARC-OFF为了结束焊接,调入程序ArcEndARC-SET 输入电流・电压・速度 AMP 输入电流 VOLT输入电压单击 OK 或登录<ファイル受信中…画面>文件名正在接收文件……退出名称种类程序名称大小最近修改日期3.关闭文件1)打开 文件 菜单 ※82)选择 关闭 ※94.☆注意点(光标的移动)关闭机器人动作后才能够移动光标 ※10可编辑 ○OFF不可编辑 ×ON※8+※9OFF (灯灭)※10文件关闭作业内容 1)修改命令a.选择要修改的命令 ※2b.焊接规范 ARC-SET界面例 修改了输入值后单击OK ※3c.焊接开始 ARC-ON界面例 修改了输入值后单击OK ※4可以直接输入文件名,也可以从参照中选择2)命令的删除( 删除) a.选择要删除的命令 退出插补形态位置名 示教速度手腕插补形态(CL) 焊接点参考*4*5选择OK或者登录 ↓*6[WAIT_IP I1#(1:I1#001)ON・T=0.00SEC] ※8选择 OK或者 登录 ↓※10单击 OK ※11WAIT_IP I1#(1:I1#001)ON・T= 0秒 标准输入等待T=0秒++端子号从参照中设定 或登录登录登录例3或者登录 ※16选择OK 或者 登录※17 4)命令的更改( 更改)确认数值 ※18 等待时间 更改文件界面)选择目标点 DELAY左右转换键 登录 退出移动光标结束 退出①数值的修改顺序1)用左右转换键换格2)旋转拨动旋钮修改数值(例)020.00表示更改了十位数 拨动按钮 上下旋转的例子3)结束=按下 登录 键6.用MDI操作修改位置1320 20※7登录左转换键右转换键编辑界面移动光标 结束退出左右转换键登录 退出7.示教点的排列将示教点按照编号顺序进行排列1.选择 编辑※12.选择 附加功能※23.选择排列示教点编号4.单击 OK8.替换※3一齐更改焊接规范・焊接速度 ※4 1.选择 编辑 ※32.选择 替换※4※1※2 附加功能的内容 (D1) ・变换补偿 ・工具补偿 ・示教点编号排序・调整TCM ,登录全局变换编辑替换<焊接规范选择界面><选择移动速度的界面><指定整个区间><指定项目><用标签指定区间><指定区间使用拨动旋钮>焊接规范 移动速度 外部轴数据退出⑨ 运行1.启动方式1)手动启动 用示教器的起动按钮运行已经打开的文件(程序)2)自动启动 ①编号指定方式在打开启动信号前,选择想要运行的程序进行启动的方式(信号)(二进制)(BCD)方式 ②主程序方式用外部启动按钮执行预先设定好的程序,这种方式叫做主程序方式※详细设定参考+α启动方式的设定3.运行的限制a.用运行模式选定 选择“限制内容”b.运行模式下用户功能键的焊接切换功能的切换OK+I/O (输入限制) 电弧 (焊接限制) 机器人 (机器人动作限制)按下取消键 返回上一界面焊接ON 由于「焊接切换」被打开,所以在焊接区间内不能起弧。