电动执行机构原理PPT课件
- 格式:ppt
- 大小:1.01 MB
- 文档页数:17
电动执行机构讲义一、工作原理1.电动机通过电源供电,将电能转换为旋转运动;2.旋转运动通过减速器传递到执行器,将其转化为线性运动或旋转运动;3.控制电路控制电动机的启停、速度和方向,从而控制执行机构的工作。
二、应用领域1.工业自动化:电动执行机构广泛应用于自动化生产线、机械加工设备等领域。
它能够实现高速、高精度的运动控制,提高生产效率和产品质量。
2.机械控制系统:电动执行机构常被用于实现机械装置的运动控制,如机械手臂、传送带、门窗开启装置等。
通过控制电动机的运动,可以精确地实现机械部件的运动和位置控制。
3.智能家居:电动执行机构还广泛应用于智能家居领域,如智能开关、窗帘控制、家庭影院设备等。
通过手机或遥控器等方式,可以方便地控制家居设备的开关和位置。
三、优缺点1.操作方便:通过控制电路可以远程、精确地控制电动执行机构的运动,提高了操作的便利性和精确性。
2.可编程性强:电动执行机构可以通过编程实现自动化控制,实现复杂的运动模式和协同工作。
3.节能环保:电动执行机构在不需要工作时可以停止供电,节省能源。
并且由于不需要使用传统的润滑油和液压装置,减少了对环境的污染。
然而,电动执行机构也存在一些缺点:1.价格较高:相比传统的机械执行机构,电动执行机构的成本较高。
这主要是由于其包含较复杂的电路控制系统和精细的执行机构。
综上所述,电动执行机构是一种高效、便捷、可编程的机械执行机构,广泛应用于工业自动化、机械控制系统和智能家居等领域。
尽管存在一些缺点,但其优点使其成为现代自动化控制领域的重要组成部分。
电动执行器工作原理电动执行器是一种通过电力驱动的装置,可将电能转换为机械运动,用于控制各种机械设备的运行。
它广泛应用于工业自动化、家庭自动化和建筑自动化等领域。
本文将介绍电动执行器的工作原理。
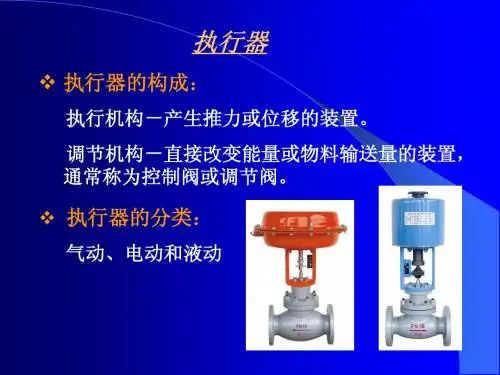
I. 电动执行器的组成电动执行器主要由电动机、减速装置、传动机构和执行机构组成。
1. 电动机:电动机是电动执行器的核心部件,它负责将电能转换为机械能。
常见的电动机有直流电动机和交流电动机两种。
直流电动机可以通过调整电流的方向和大小来改变转速和扭矩,而交流电动机的转速和扭矩受电源频率和电压的影响。
2. 减速装置:减速装置用于调整电动机的转速,提供合适的扭矩输出。
通常使用齿轮传动、带传动或蜗杆传动等方式实现减速。
3. 传动机构:传动机构将电动机的旋转运动转换为线性运动,从而驱动执行机构的工作。
常见的传动机构有齿轮传动、链条传动、蜗杆传动等。
4. 执行机构:执行机构是电动执行器的末端装置,用于实现具体的控制动作。
根据不同的应用需求,执行机构可以是阀门、门窗、阀门、泵等。
II. 电动执行器的工作原理电动执行器的工作原理可以简单描述为:电能输入→电动机驱动→减速装置调整转速→传动机构转换运动→执行机构控制动作。
1. 电能输入:电动执行器通过外部电源供电,将电能输入到电动机。
2. 电动机驱动:电源提供的电能进入电动机,驱动电动机转动。
电动机的类型和特性会影响到电动执行机构的运行方式。
3. 减速装置调整转速:电动机驱动的转速通常较高,为了适应不同的执行机构需求,需要通过减速装置降低转速,并提供合适的扭矩输出。
4. 传动机构转换运动:减速装置输出的旋转运动经由传动机构,经过齿轮、链条等传动元件,将旋转运动转换为线性运动或其他形式的运动。
5. 执行机构控制动作:最后,传动机构的运动通过执行机构实现具体的控制动作,如打开或关闭阀门、推拉门窗等。
III. 电动执行器的特点与应用电动执行器具有以下几个特点,使其在自动控制系统中得到广泛应用。

电动执行器工作原理电动执行器(Electric Actuator)是一种能够根据电动信号转换为机械运动的设备,广泛应用于自动化控制领域。
它通过电能转换为机械能,实现对阀门、门窗、泵、风门、蝶阀等执行机构的开、关、调节等工作。
1.电动机:电动执行器通常采用直流电机或交流电机作为驱动源。
电动机能够将电能转化为机械能,通过转子和定子的磁场相互作用实现旋转运动。
电动执行器中的电动机通常是通过传动装置将旋转转换成直线运动,实现执行机构的运动。
2.驱动机构:驱动机构是电动执行器的核心部件,它将电动机的旋转运动转换成直线运动,并通过这种直线运动实现对执行机构的控制。
常见的驱动机构包括蜗杆传动、滚珠丝杠传动、齿轮传动等。
不同的驱动机构有不同的特点和适用范围,选择合适的驱动机构能够提高电动执行器的工作效率和精度。
3.传感器:传感器用于感知执行机构的位置和状态,将感知到的信号转化为电信号后送至控制电路。
常见的传感器有位置传感器、角度传感器、负荷传感器等。
传感器的作用是实时监测执行机构的状态,为控制电路提供准确的反馈信息,从而实现对执行机构的精确控制。
4.控制电路:控制电路是电动执行器的控制中心,通过处理传感器反馈的信号,并与其它控制系统进行通信,实现对执行机构的精确控制。
控制电路可以根据输入的电信号控制电动机的转动方向和速度,根据传感器的反馈信号控制执行机构的位置和状态。
总体来说,电动执行器的工作原理是通过电动机将电能转换为机械能,通过驱动机构将旋转运动转换为直线运动,通过传感器感知执行机构的状态,并通过控制电路实现对执行机构的精确控制。
这种工作原理使得电动执行器具有高效、精确、可靠的特点,能够满足自动化控制领域的各种需求。
电动执行机构的工作原理
电动执行机构的工作原理主要包括电能转换、传动装置和执行机构三个部分。
首先,电能转换是指将电能转换为机械能的过程,通常采用电动机作为能量转换的核心部件。
电动机通过电能输入,产生旋转运动,从而驱动传动装置的运转。
传动装置则起到传递和调节动力的作用,通常包括齿轮、皮带、链条等传动装置。
最后,执行机构是指根据控制信号,将机械能转换为具体的工作输出,比如线性运动、旋转运动等。
在工业生产中,电动执行机构广泛应用于自动化生产线、机械手臂、机械设备等领域。
它能够实现精准的动作控制,提高生产效率,减少人力成本,同时也能够保证生产过程的稳定性和安全性。
电动执行机构的工作原理是基于电能转换和机械传动的基本原理,通过精密的设计和控制,实现了高效、精准的动作输出。
它在工业自动化领域的应用将会越来越广泛,为工业生产带来更大的便利和效益。
总的来说,电动执行机构是一种能够将电能转换为机械能的装置,其工作原理包括电能转换、传动装置和执行机构三个部分。
它
在工业生产中起着至关重要的作用,能够实现精准的动作控制,提高生产效率,保证生产过程的稳定性和安全性。
随着工业自动化的发展,电动执行机构的应用前景将会更加广阔。
电动执行器工作原理线性电动执行器的工作原理主要包括电机、传动装置和控制电路三部分。
电机是执行器的核心部件,它通过传动装置将电能转化为机械运动能。
常见的线性电动执行器中常用的电机类型有直流电机、步进电机和伺服电机。
直流电机是最常见的一种电机类型,它通过改变电流的方向和大小来实现机械运动。
直流电机有两种类型,分别是直流有刷电机和无刷电机。
有刷电机中,电流通入电机的转子通过刷子与旋转的集电环进行接触,从而形成电能→机械能的转换。
无刷电机则通过电子元器件控制电机的转子和定子之间的电流变化,实现电能→机械能的转换。
直流电机通常具有易控制、响应速度较快的优点,因此广泛应用于各种线性电动执行器中。
步进电机是一种数字式电动机,通过不同相位的脉冲信号驱动电机转动。
步进电机的转子采用永磁体,定子上有多相绕组,根据脉冲信号的改变,可以实现电机转动的精确定位。
步进电机由于其稳定性高、定位精度好等优点,被广泛应用于需要精确运动控制的场合,例如3D打印机、CNC加工设备等。
伺服电机是一种能够根据控制信号来控制转子位置的电机。
伺服电机通过采集传感器的反馈信号,不断调整控制信号,使得转子始终保持在所需位置。
伺服电机具有响应速度快、定位精度高的特点,广泛应用于需要高精度运动控制的自动化领域。
传动装置是连接电机和负载的部分,传输电机产生的力或扭矩给负载。
传动装置根据执行器的不同应用需求,包括螺杆传动、齿轮传动、链传动等。
螺杆传动是最常见的一种传动方式,它通过螺杆上的螺纹与螺母之间的相对运动,将旋转运动转化为线性运动。
齿轮传动则通过两个齿轮之间的嵌合来实现力或扭矩的传递。
控制电路是控制执行器运动的核心部分,它能够将输入的电信号转化为电机的工作信号。
控制电路通常由电源、电调器、编码器和反馈传感器组成。
电调器控制电机的转速和方向,编码器和反馈传感器则实时监测电机的转角或位置信息,并将其反馈给控制电路。
根据反馈信号和控制信号之间的差异,控制电路会调整输出信号,使得电机按照预定的轨迹运动。